

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (3): 579-591.doi: 10.16182/j.issn1004731x.joss.21-1131
• Papers • Previous Articles Next Articles
Jianhui Zhao1( ), Peijun Zhong1, Zhiyong Yuan1(), Wenyuan Zhao2, Tingbao Zhang2
), Peijun Zhong1, Zhiyong Yuan1(), Wenyuan Zhao2, Tingbao Zhang2
Received:2021-11-05
Revised:2021-12-31
Online:2023-03-30
Published:2023-03-22
Contact:
Zhiyong Yuan
E-mail:jianhuizhao@whu.edu.cn;zhiyongyuan@whu.edu.cn
CLC Number:
Jianhui Zhao, Peijun Zhong, Zhiyong Yuan, Wenyuan Zhao, Tingbao Zhang. A New Electromagnetic Positioning Model with Single Coil Receiver for Virtual Interventional Surgery[J]. Journal of System Simulation, 2023, 35(3): 579-591.
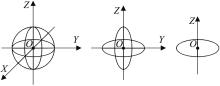
Fig. 1
Receiving end structure of electromagnetic positioning
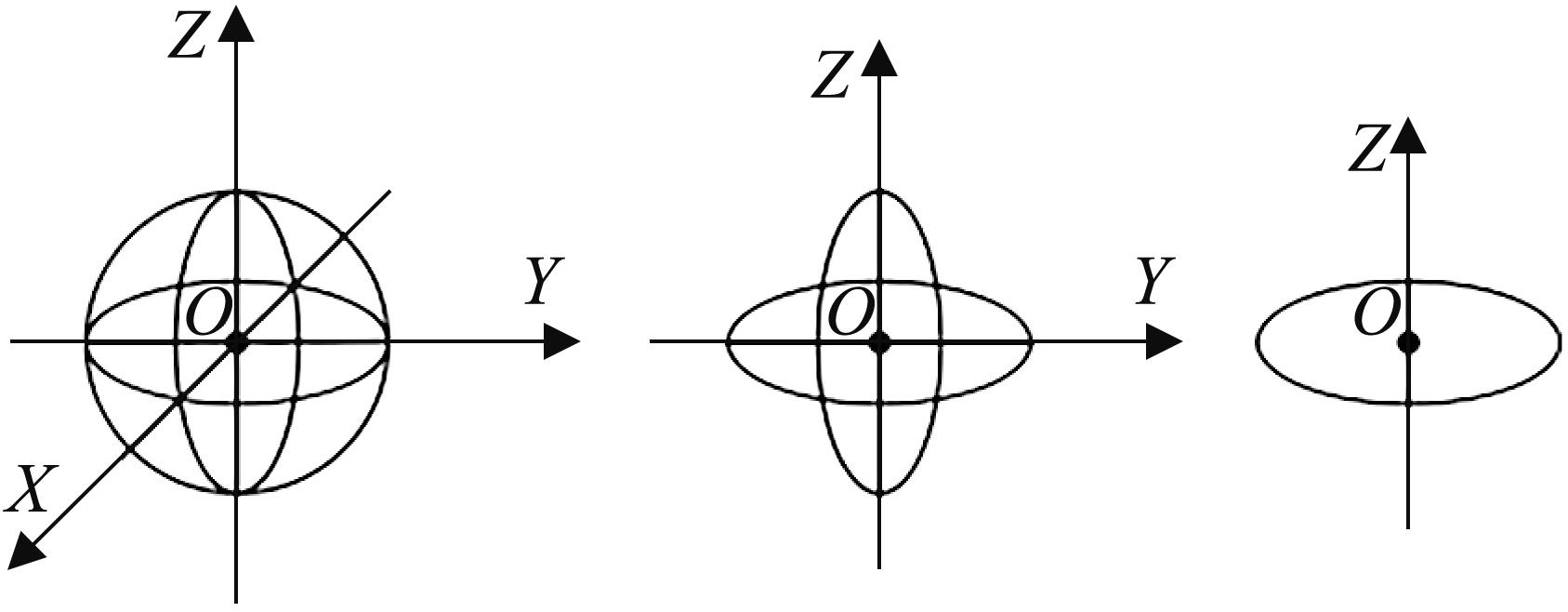
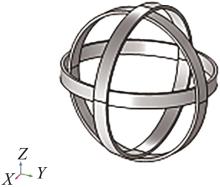
Fig. 2
Three orthogonal coils at transmitting end
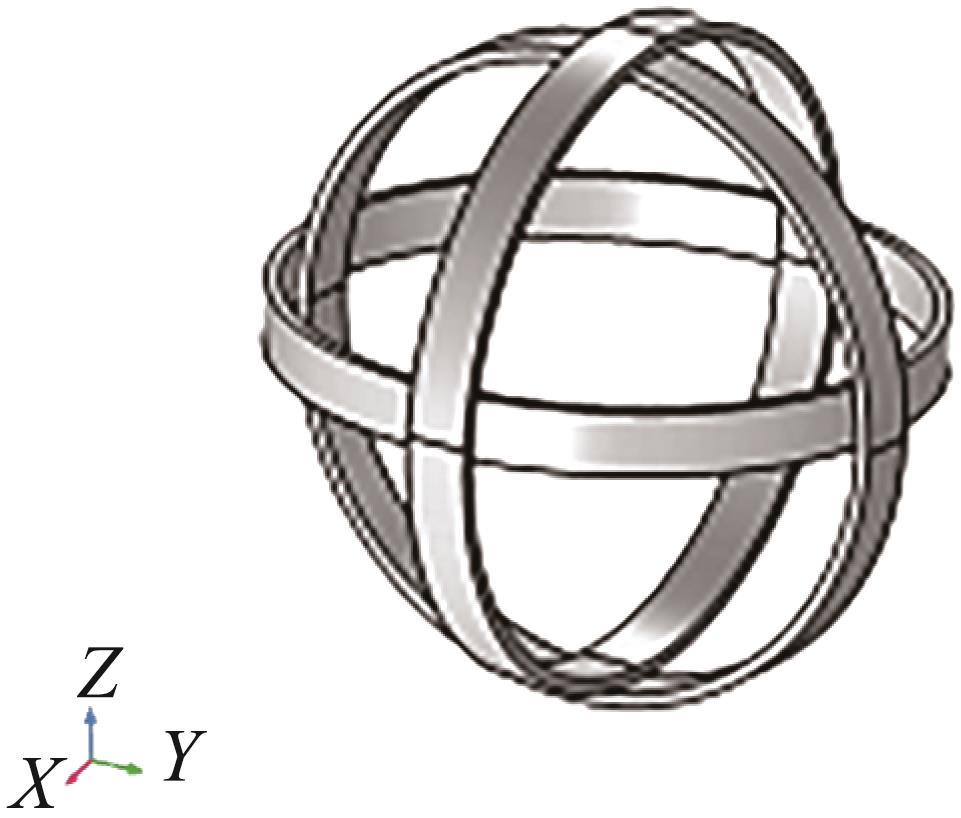
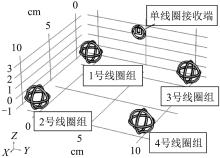
Fig. 3
Transmitting end with array of coil groups and single coil receiving end
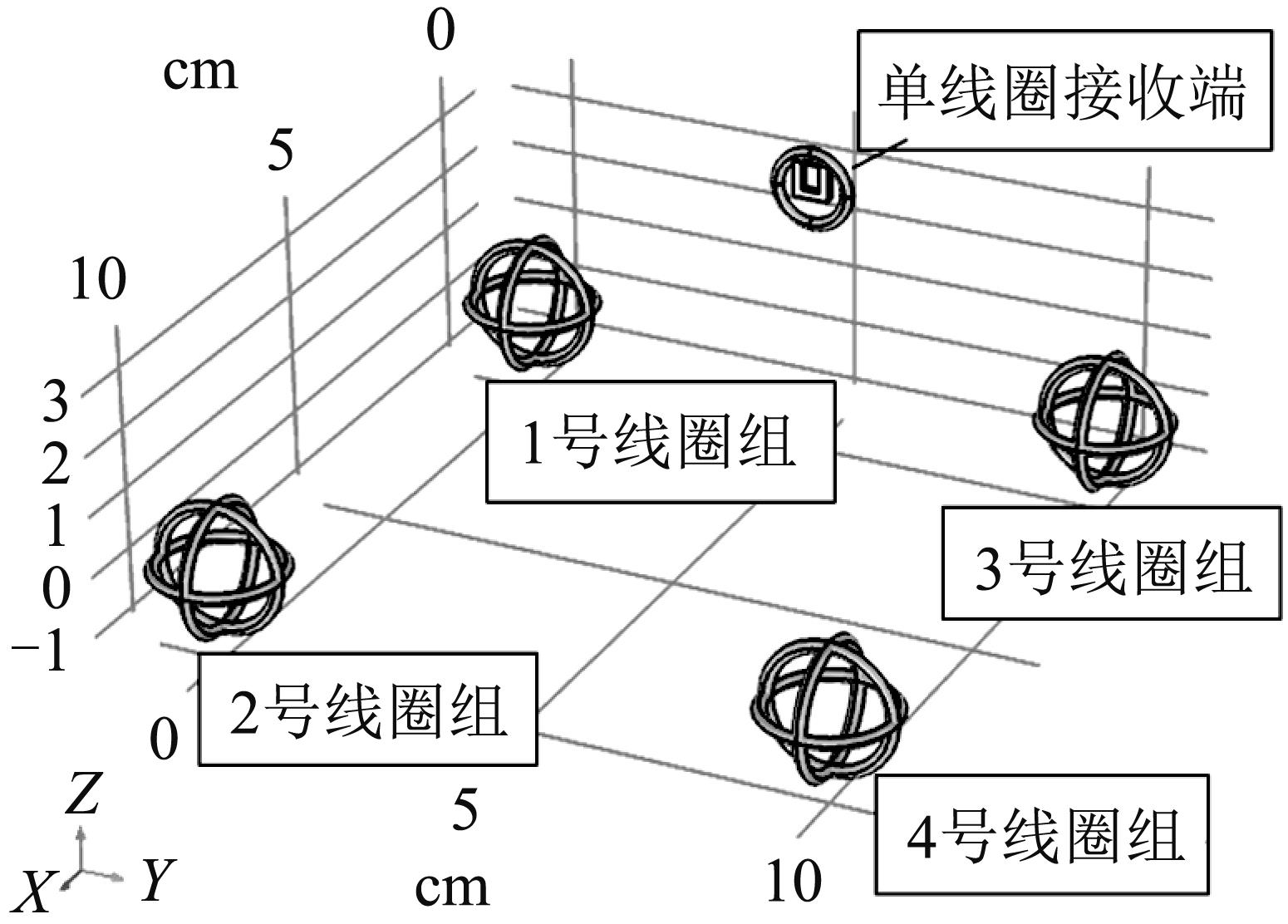
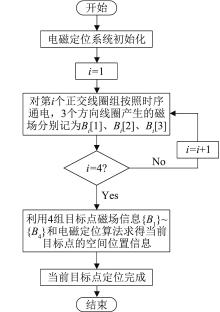
Fig. 4
Workflow of new positioning model
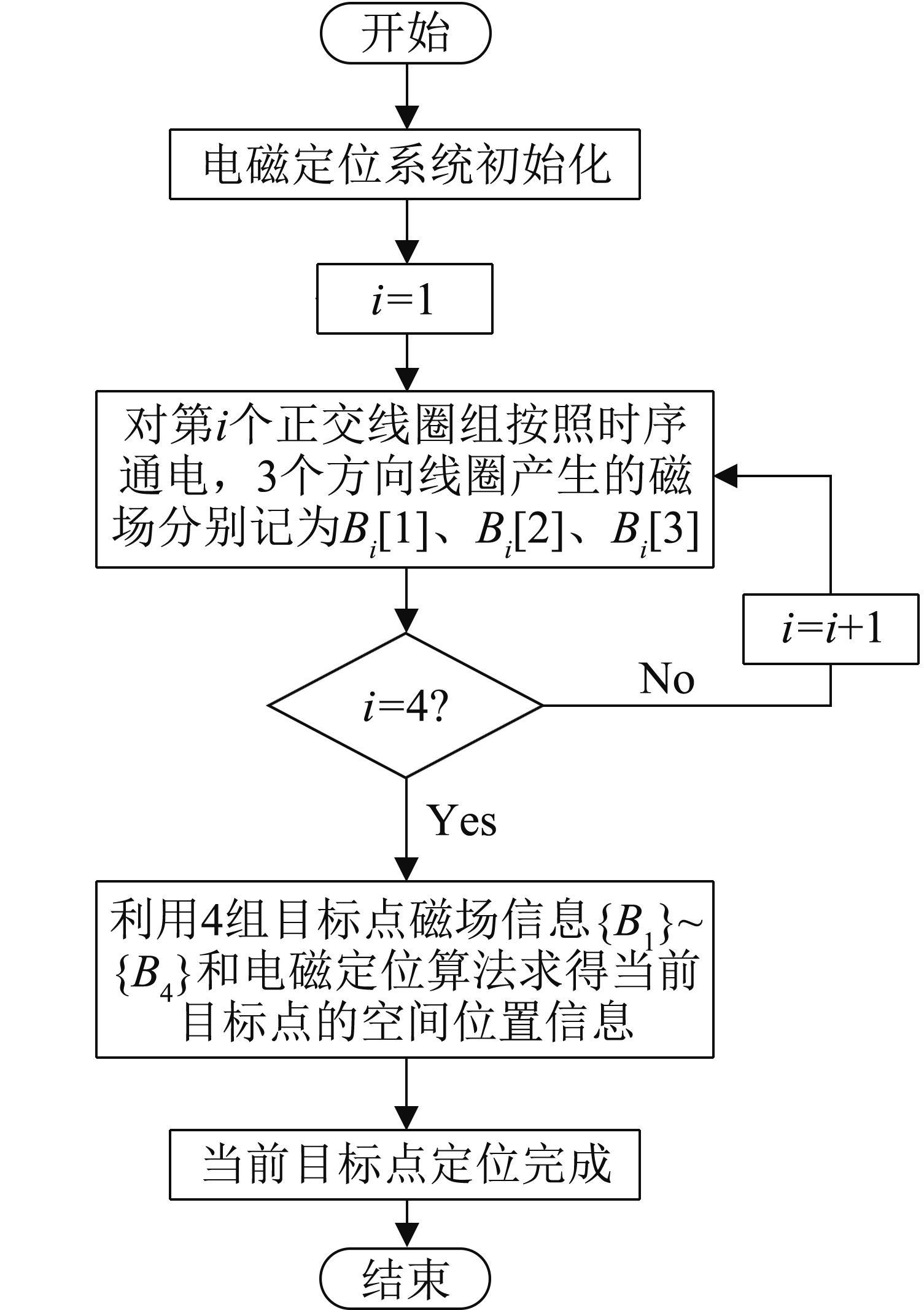
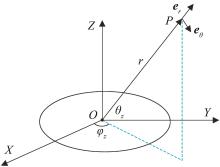
Fig. 5
Diagram of physical quantities in Formula (1)
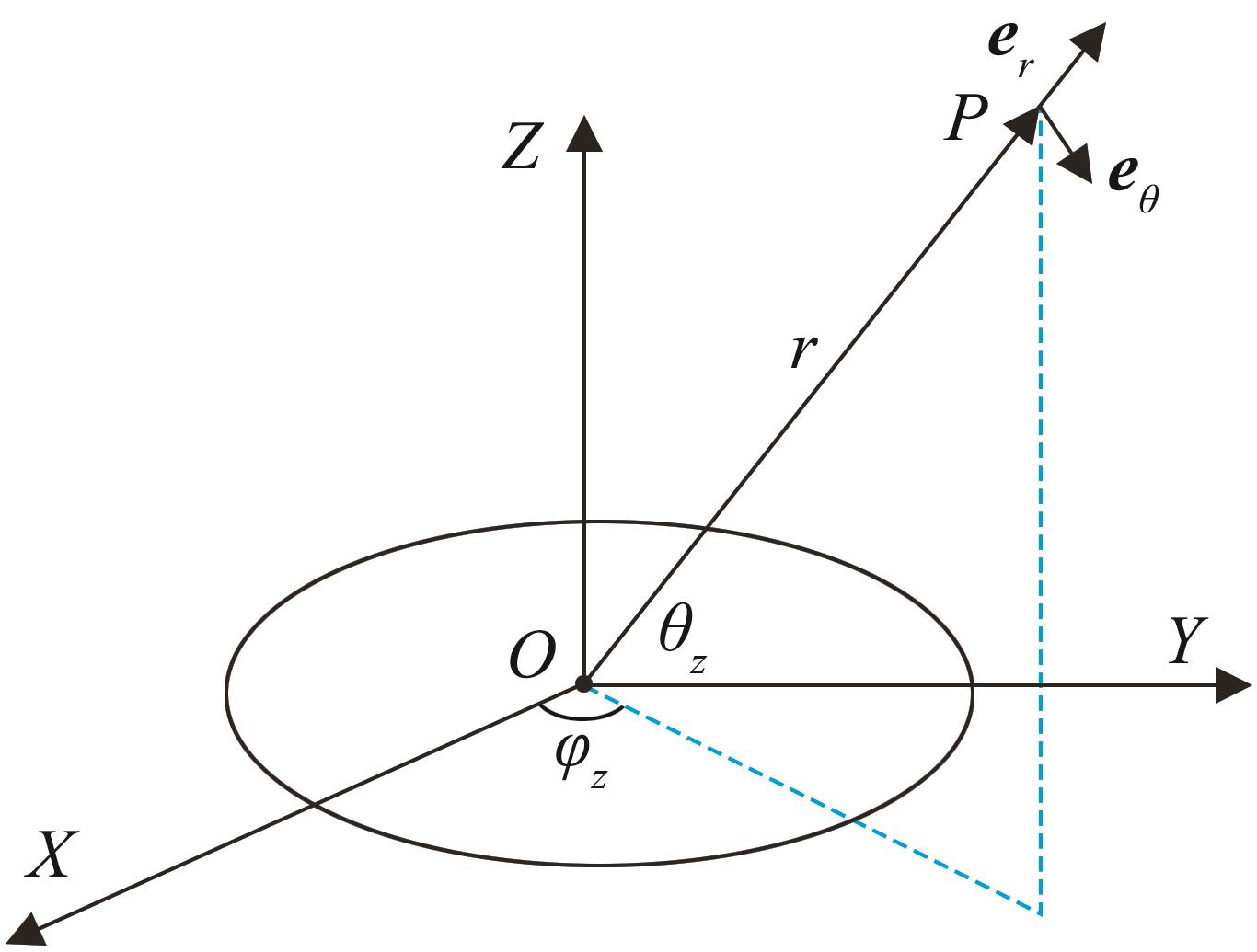
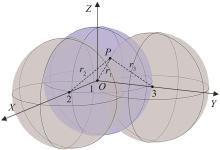
Fig. 6
Coordinate solution from 3 orthogonal coil groups
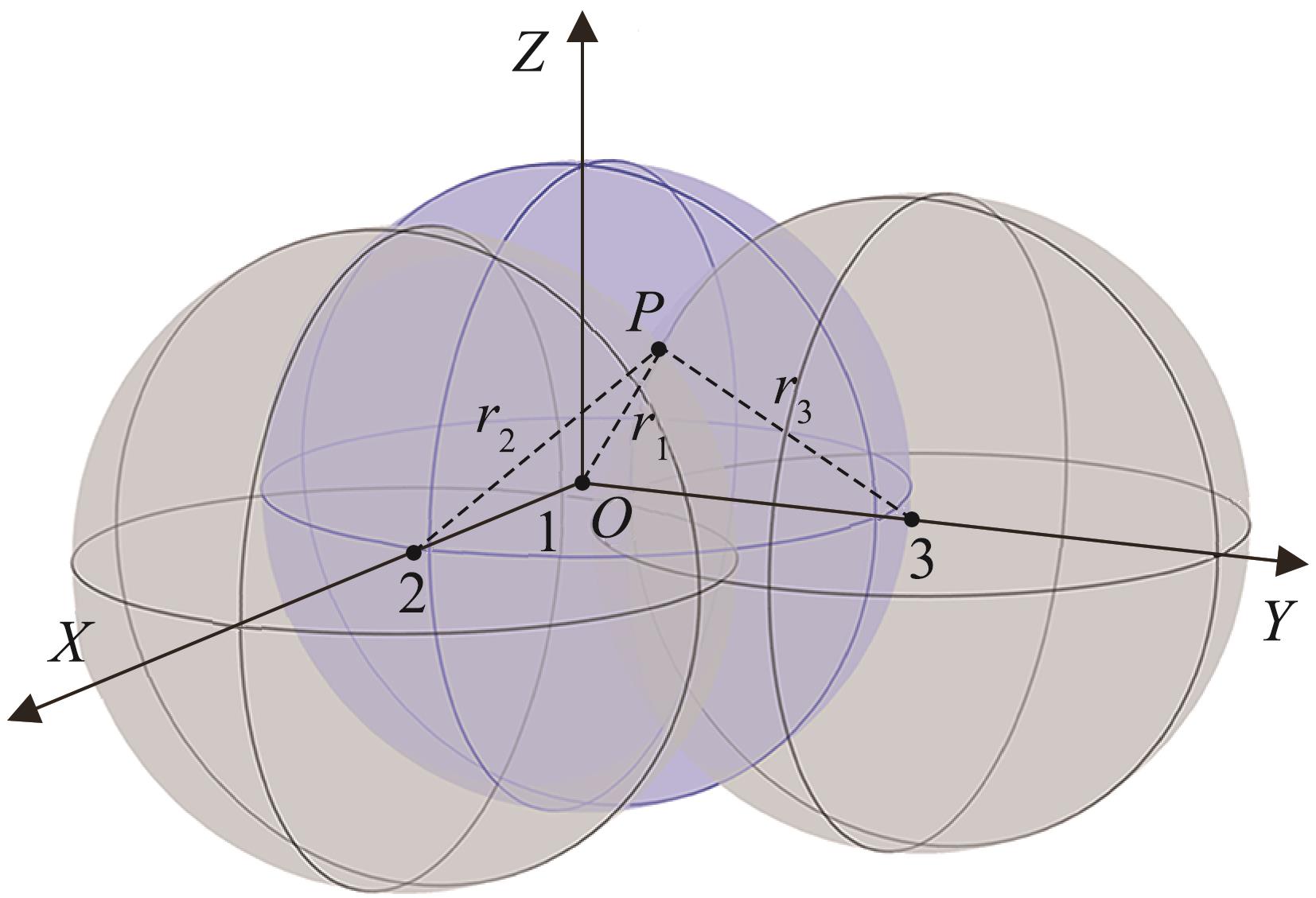
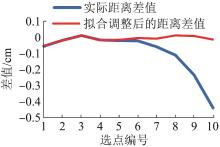
Fig. 7
Difference between calculated and actual distances
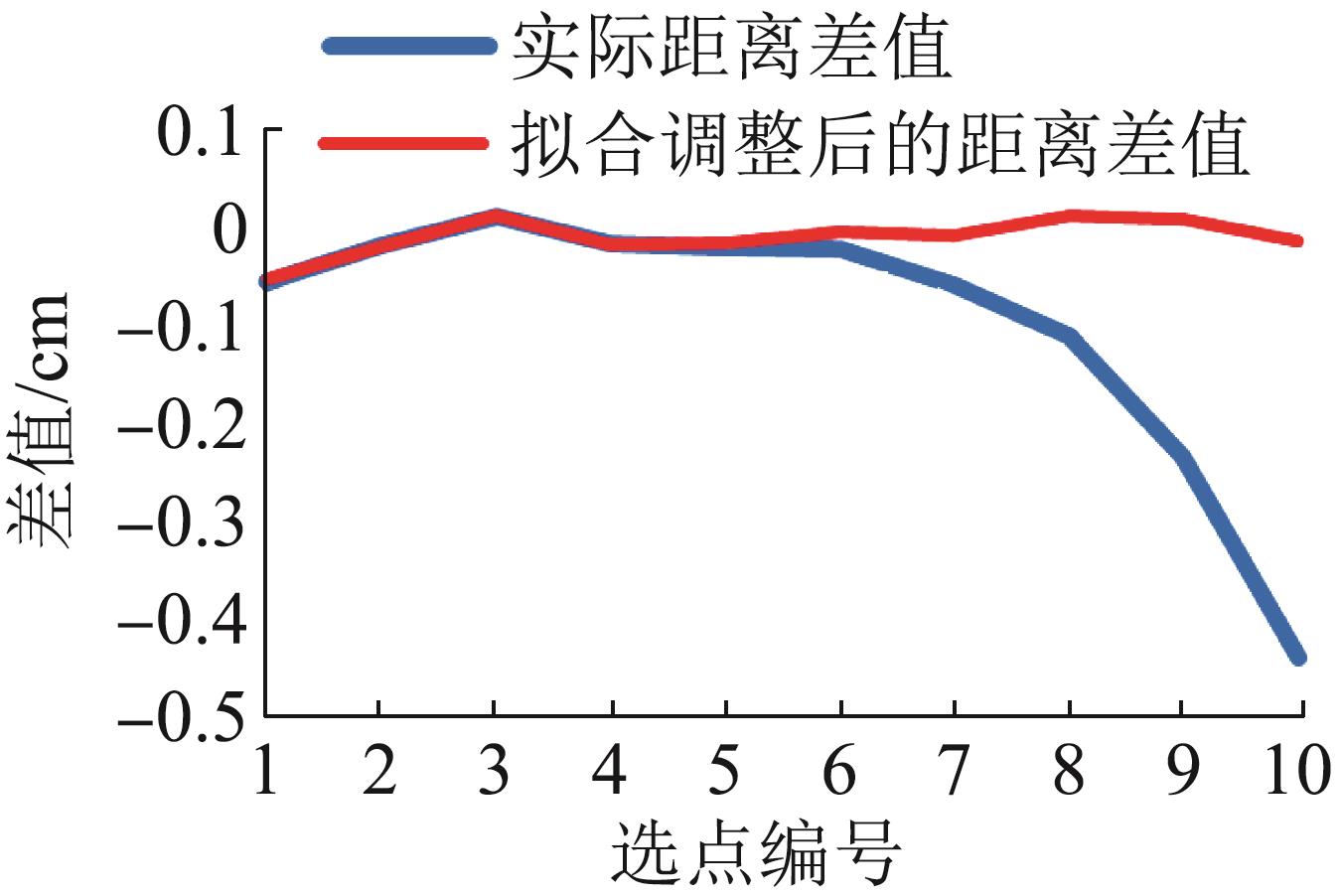
Table 1
Material and basic parameters of the model
| 参数 | 数值 |
|---|---|
| 导线材料 | Copper |
| 电流/A | 100×2 |
| 导线截面积/mm2 | 3.14 |
| 空间材料 | Air |
| 空间范围 | 40 cm×40 cm×40 cm |
| 线圈大半径/cm | 1 |
Table 2
Specific parameters of simulation materials
| 材料 | 属性 | 值 |
|---|---|---|
| Copper | 相对磁导率 | 1 |
| 电导率(S/m) | 5.998E7 | |
| 相对介电常数 | 1 | |
| Air | 相对磁导率 | 1 |
| 电导率(S/m) | 0 | |
| 相对介电常数 | 1 |
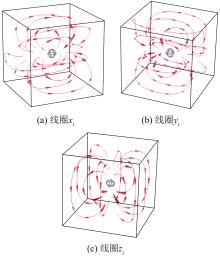
Fig. 8
Diagram of spatial magnetic field distribution of orthogonal coil group at different time
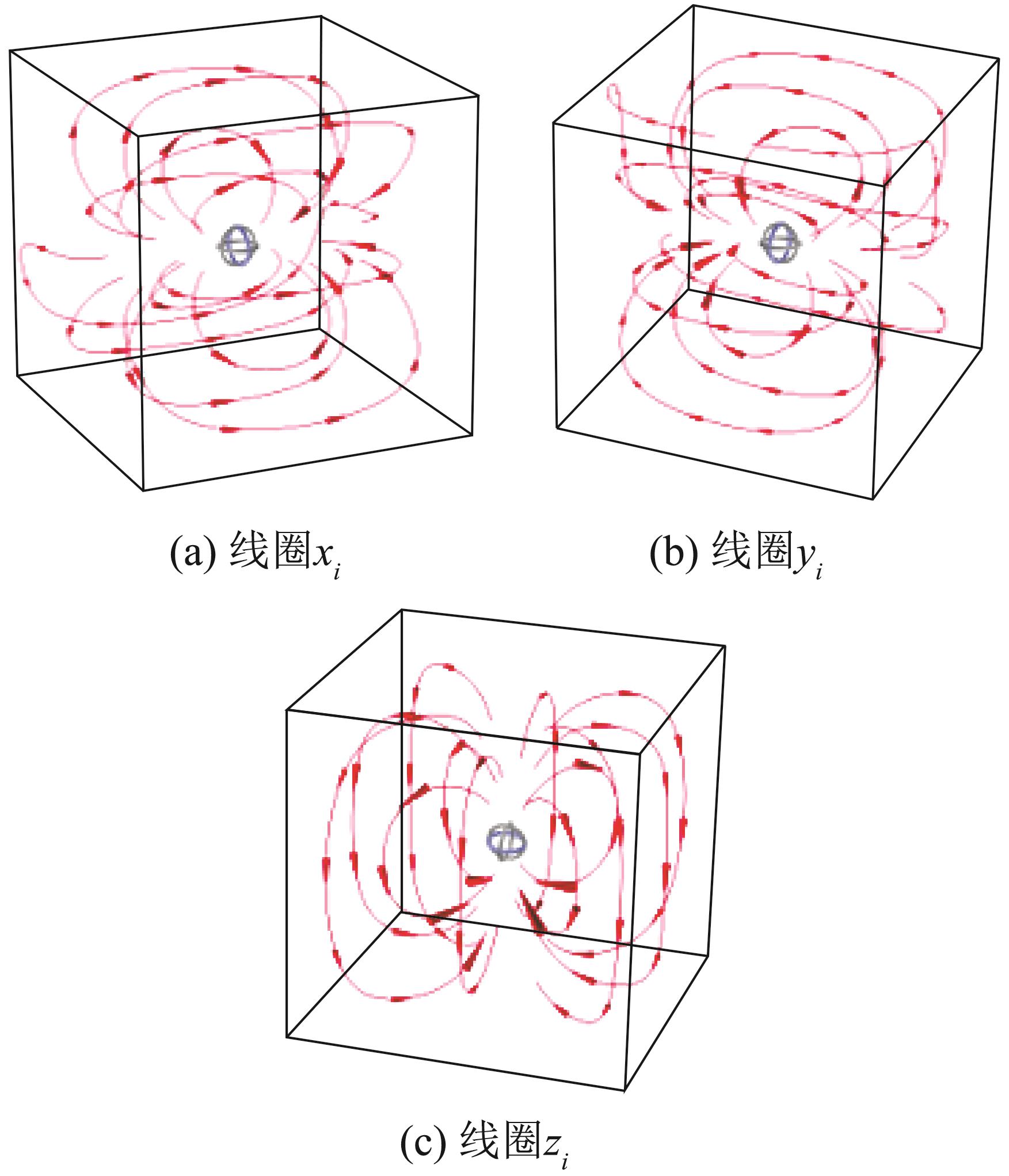
Table 3
Magnetic field information at target point 1 in the simulation scenario in scene
| 正交线圈组 | x分量 | y分量 | z分量 |
|---|---|---|---|
| 1号 | 5.374 4E-5 | 5.435 9E-5 | 9.512 0E-5 |
| 2号 | 7.498 8E-6 | 5.525 0E-6 | 6.018 8E-6 |
| 3号 | 5.550 9E-6 | 7.555 3E-6 | 6.036 4E-6 |
| 4号 | 2.715 8E-6 | 2.736 5E-6 | 2.792 4E-6 |
Table 4
Calculated distance and error from target point to geometric center of coil group
| 点位编号 | 线圈组 | |||
|---|---|---|---|---|
| 1号 | 2号 | 3号 | 4号 | |
| 1号点 | 5.014 9 | 11.134 1 | 11.154 3 | 14.786 7 |
| 理论 | 5.000 0 | 11.180 3 | 11.180 3 | 15.000 0 |
| 误差 | 0.014 9 | -0.046 2 | -0.026 0 | -0.213 3 |
| 2号点 | 8.652 5 | 8.663 7 | 8.652 3 | 8.633 6 |
| 理论 | 8.660 3 | 8.660 3 | 8.660 3 | 8.660 3 |
| 误差 | -0.007 8 | 0.003 4 | -0.008 0 | -0.026 7 |
| 3号点 | 16.883 1 | 13.979 8 | 13.976 7 | 10.003 2 |
| 理论 | 17.320 5 | 14.142 1 | 14.142 1 | 10.000 0 |
| 误差 | -0.437 4 | -0.162 2 | -0.165 4 | 0.003 2 |
| 4号点 | 13.993 2 | 13.996 4 | 11.244 9 | 11.241 7 |
| 理论 | 14.142 1 | 14.142 1 | 11.260 3 | 11.260 3 |
| 误差 | -0.148 9 | -0.145 7 | -0.015 4 | -0.018 6 |
Table 5
Comparison between calculated coordinates and known coordinates of target point
| 点位编号 | x | y | z |
|---|---|---|---|
| 1号点 | 0.036 5 | 0.059 1 | 5.014 4 |
| 已知 | 0.000 0 | 0.000 0 | 5.000 0 |
| 误差 | 0.036 5 | 0.059 1 | 0.014 4 |
| 2号点 | 5.000 2 | 4.990 4 | 4.996 0 |
| 已知 | 5.000 0 | 5.000 0 | 5.000 0 |
| 误差 | 0.000 2 | -0.009 6 | -0.004 0 |
| 3号点 | 9.484 7 | 9.480 3 | 10.257 0 |
| 已知 | 10.000 0 | 10.000 0 | 10.000 0 |
| 误差 | -0.515 3 | -0.519 7 | 0.257 0 |
| 4号点 | 8.468 0 | 4.995 6 | 9.957 2 |
| 已知 | 8.660 3 | 5.000 0 | 10.000 0 |
| 误差 | -0.192 3 | -0.004 4 | -0.042 8 |
Table 6
Positioning results after the first round of accuracy improvement algorithm
| 点位编号 | x | y | z |
|---|---|---|---|
| 1号点 | 0.036 5 | 0.059 1 | 5.014 4 |
| 已知 | 0.000 0 | 0.000 0 | 5.000 0 |
| 误差 | 0.036 5 | 0.059 1 | 0.014 4 |
| 2号点 | 5.000 2 | 5.016 1 | 4.970 1 |
| 已知 | 5.000 0 | 5.000 0 | 5.000 0 |
| 误差 | 0.000 2 | 0.016 1 | -0.029 9 |
| 3号点 | 9.768 5 | 9.764 2 | 9.997 7 |
| 已知 | 10.000 0 | 10.000 0 | 10.000 0 |
| 误差 | -0.231 5 | -0.235 8 | -0.002 3 |
| 4号点 | 8.468 1 | 5.003 6 | 9.953 2 |
| 已知 | 8.660 3 | 5.000 0 | 10.000 0 |
| 误差 | -0.192 2 | 0.003 6 | -0.046 8 |
Table 7
Positioning results after two rounds of accuracy improvement algorithm
| 点位编号 | x | y | z |
|---|---|---|---|
| 1号点 | 0.004 4 | 0.027 5 | 5.014 8 |
| 已知 | 0.000 0 | 0.000 0 | 5.000 0 |
| 误差 | 0.004 4 | 0.027 5 | 0.014 8 |
| 2号点 | 5.000 2 | 5.016 2 | 4.975 7 |
| 已知 | 5.000 0 | 5.000 0 | 5.000 0 |
| 误差 | 0.000 2 | 0.016 2 | -0.024 3 |
| 3号点 | 9.946 8 | 9.942 2 | 10.015 0 |
| 已知 | 10.000 0 | 10.000 0 | 10.000 0 |
| 误差 | -0.053 2 | -0.057 8 | 0.015 0 |
| 4号点 | 8.625 6 | 5.003 7 | 10.010 5 |
| 已知 | 8.660 3 | 5.000 0 | 10.000 0 |
| 误差 | -0.034 7 | 0.003 7 | 0.010 5 |
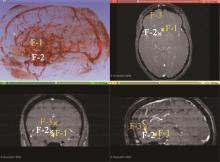
Fig. 9
Target points location in 3D cerebrovascular
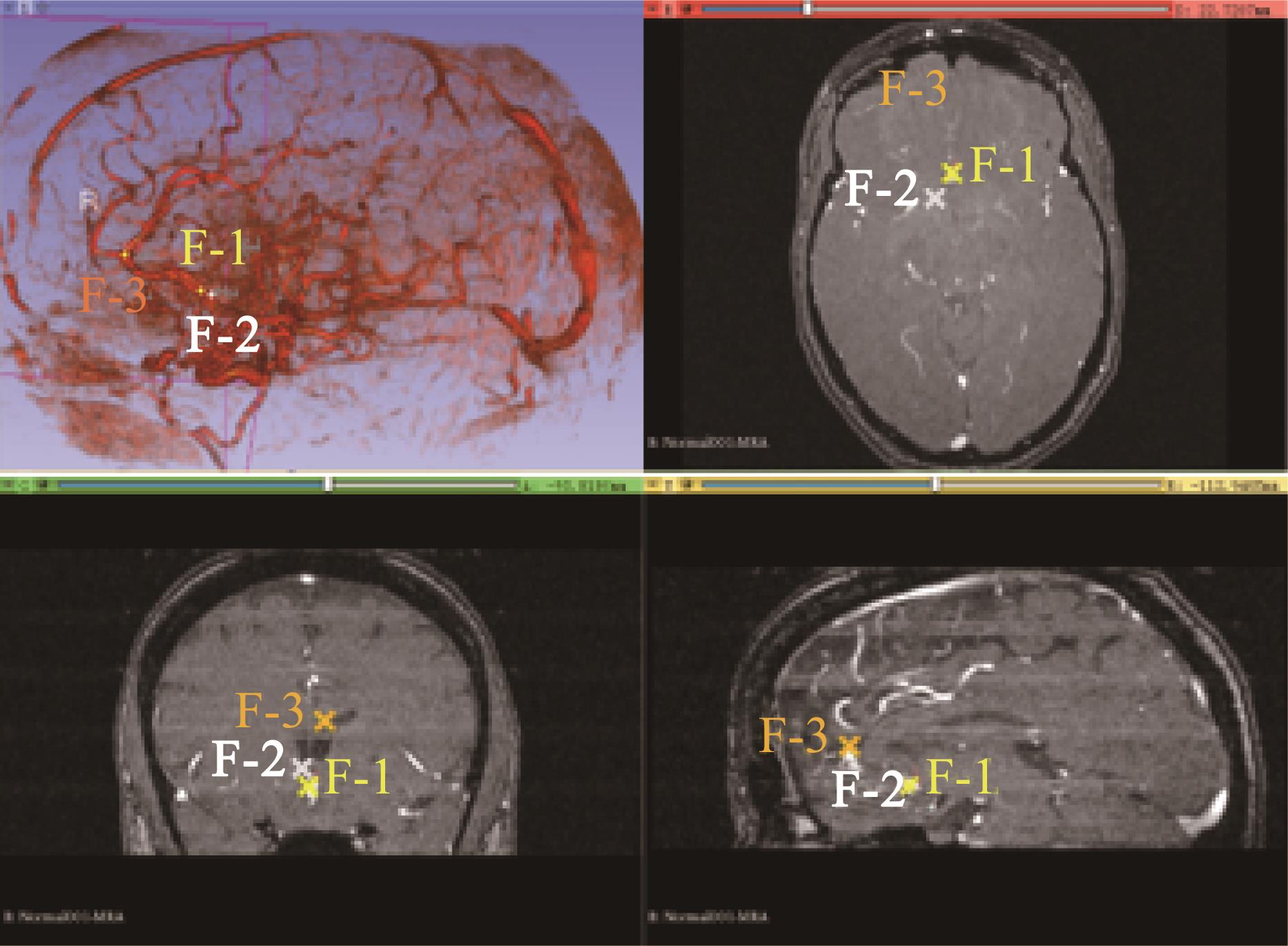
Table 8
Localization results of cerebrovascular intervention
| 点位编号 | x | y | z |
|---|---|---|---|
| 1号点 | -1.295 0 | 0.618 0 | 2.272 0 |
| 计算结果 | -1.282 9 | 0.588 6 | 2.239 9 |
| 误差 | 0.012 1 | -0.029 4 | -0.032 1 |
| 2号点 | -1.397 0 | 0.869 0 | 2.558 0 |
| 计算结果 | -1.389 3 | 0.839 0 | 2.544 1 |
| 误差 | 0.007 7 | -0.030 0 | -0.013 9 |
| 3号点 | -1.192 0 | 2.907 0 | 3.362 0 |
| 计算结果 | -1.188 5 | 2.914 9 | 3.329 2 |
| 误差 | 0.003 5 | 0.007 9 | -0.032 8 |
Table 9
Electromagnetic positioning accuracy comparison
| 方法 | x | y | z | 均方误差 |
|---|---|---|---|---|
| 本文单线圈接收端方法 | 1.005 8 | 0.987 4 | 0.942 8 | 0.058 9 |
| 1.979 8 | 1.974 6 | 1.955 7 | 0.054 9 | |
| 3.005 1 | 2.973 2 | 2.981 1 | 0.033 2 | |
| 3.984 9 | 3.985 4 | 3.975 9 | 0.032 0 | |
| 5.013 1 | 4.992 6 | 4.964 6 | 0.038 5 | |
| 5.992 6 | 5.958 8 | 5.990 7 | 0.042 9 | |
| 7.010 1 | 6.985 3 | 6.999 8 | 0.017 8 | |
| 8.003 4 | 7.980 9 | 7.993 9 | 0.020 3 | |
| 8.983 0 | 8.979 7 | 9.013 8 | 0.029 9 | |
| 9.981 3 | 9.986 3 | 10.017 8 | 0.029 2 | |
| 现有三线圈接收端方法 | 0.952 4 | 0.980 5 | 1.002 1 | 0.051 5 |
| 1.988 2 | 1.935 5 | 1.997 1 | 0.065 6 | |
| 3.022 0 | 2.890 3 | 3.062 6 | 0.128 2 | |
| 3.979 6 | 3.936 0 | 4.034 9 | 0.075 7 | |
| 5.034 2 | 4.993 4 | 4.938 0 | 0.071 1 | |
| 6.023 9 | 5.962 1 | 5.969 9 | 0.054 0 | |
| 7.023 8 | 6.981 1 | 6.907 9 | 0.097 0 | |
| 7.979 2 | 7.899 1 | 7.923 0 | 0.128 6 | |
| 8.873 4 | 8.861 6 | 8.862 8 | 0.232 4 | |
| 9.758 5 | 9.733 0 | 9.747 8 | 0.439 6 |
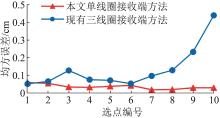
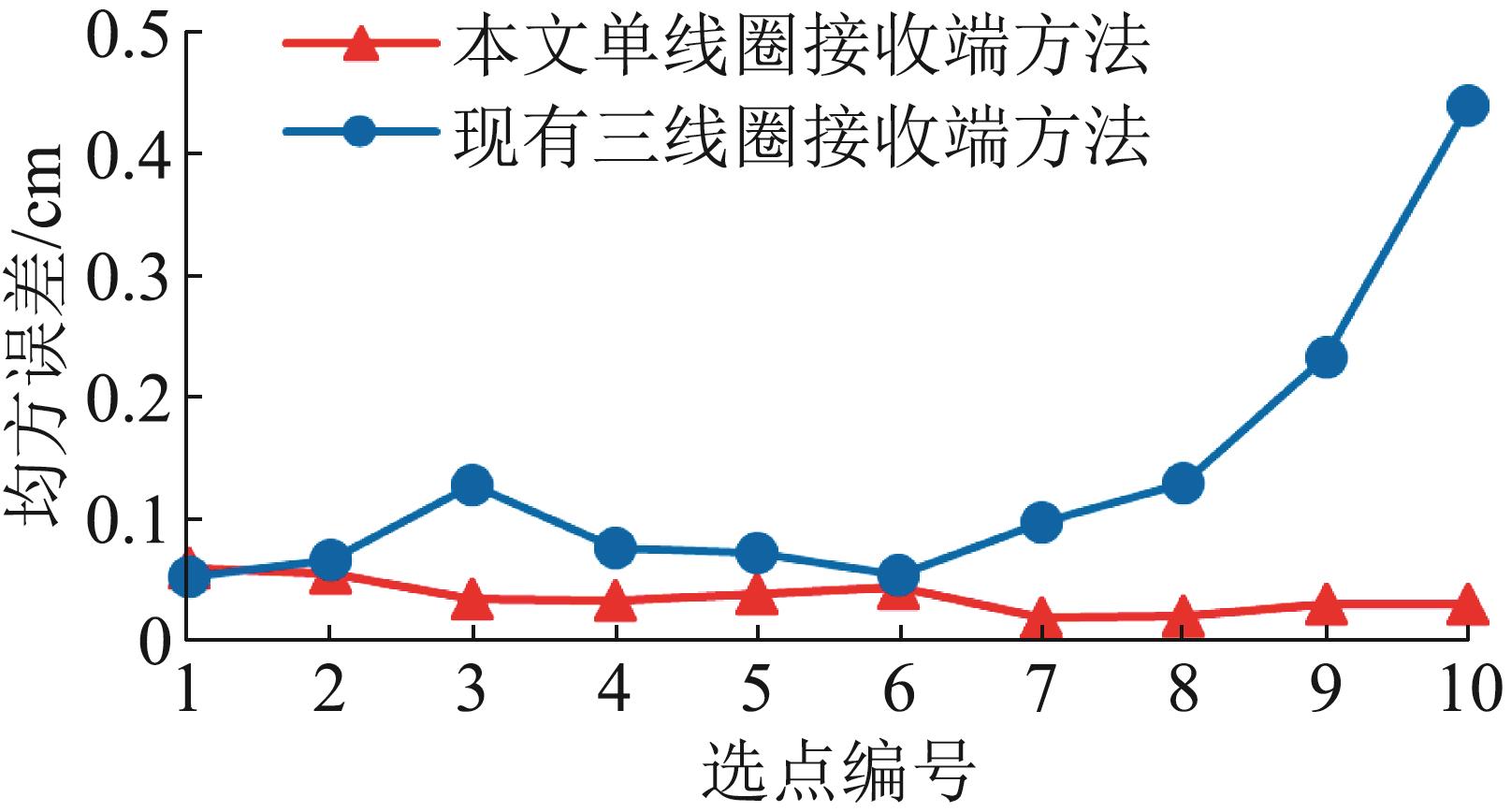
Fig. 10
Comparison of mean square errors between two positioning methods
| 1 | Boyle P M, Zghaib T, Zahid S, et al. Computationally Guided Personalized Targeted Ablation of Persistent Atrial Fibrillation[J]. Nature Biomedical Engineering (S2157-846X), 2019, 3: 870-879. |
| 2 | Bassil G, Markowitz S M, Liu C F, et al. Robotics for Catheter Ablation of Cardiac Arrhythmias: Current Technologies and Practical Approaches[J]. Journal of Cardiovascular Electrophysiology (S1045-3873), 2020, 31: 739-752. |
| 3 | Yaras Y S, Satir S, Ozsoy C, et al. Acousto-Optic Catheter Tracking Sensor for Interventional MRI Procedures[J]. IEEE Transactions on Biomedical Engineering (S0018-9294), 2019, 66(4): 1148-1154. |
| 4 | Jin X, Guo S, Guo J, et al. Development of a Tactile Sensing Robot-Assisted System for Vascular Interventional Surgery[J]. IEEE Sensors Journal (S1530-437X), 2021, 21(10): 12284-12294. |
| 5 | Graham M, Assis F, Allman D, et al. In Vivo Demonstration of Photoacoustic Image Guidance and Robotic Visual Servoing for Cardiac Catheter-Based Interventions[J]. IEEE Transactions on Medical Imaging (S0278-0062), 2020, 39(4): 1015-1029. |
| 6 | Yang C, Antoine C, Young B K, et al. A Pilot Study on Fetal Heart Rate Extraction from Wearable Abdominal Inertial Sensors[J]. IEEE Sensors Journal (S1530-437X), 2019, 19(22): 10773-10781. |
| 7 | Youn J, Ommen M L, Stuart M B, et al. Detection and Localization of Ultrasound Scatterers Using Convolutional Neural Networks[J]. IEEE Transactions on Medical Imaging (S0278-0062), 2020, 39(12): 3855-3867. |
| 8 | Sorriento A, Porfido M B, Mazzoleni S, et al. Optical and Electromagnetic Tracking Systems for Biomedical Applications: A Critical Review on Potentialities and Limitations[J]. IEEE Reviews in Biomedical Engineering (S1937-3333), 2020, 13: 212-232. |
| 9 | 赵小贺. 医用三维电磁定位系统的研究[D]. 黑龙江: 哈尔滨工业大学, 2019. |
| Zhao Xiaohe. Research of Three Dimensional Electromagnetic Positioning System for Medical Application[D]. Heilongjiang: Harbin Institute of Technology, 2019. | |
| 10 | Paperno E, Sasada I, Leonovich E. A New Method for Magnetic Position and Orientation Tracking[J], IEEE Transactions on Magnetics (S0018-9464), 2001, 37(4): 1938-1940. |
| 11 | 毕津滔, 张永德, 孙波涛. 基于电磁跟踪与超声图像的介入机器人穿刺导航方法及实验研究[J]. 仪器仪表学报, 2019, 40(7): 253-262. |
| Bi Jintao, Zhang Yongde, Sun Botao. Puncture Navigation Method and Experiment of Interventional Robot Based on Electromagnetic Tracking and Ultrasound Image[J]. Chinese Journal of Scientific Instrument, 2019, 40(7): 253-262. | |
| 12 | 戴知宇. 基于电磁导航与增强现实的复杂先心病畸形病灶定位技术研究[D]. 广州: 华南理工大学, 2019. |
| Dai Zhiyu. Accurate Localization Methods in Complex Congenital Heart Disease Malformation Using Electromagnetic Navigation and Augmented Reality[D]. Guangzhou: South China University of Technology, 2019. | |
| 13 | Kazanzides P, Ren H L. Investigation of Attitude Tracking Using an Integrated Inertial and Magnetic Navigation System for Hand-Held Surgical Instruments[J]. IEEE/ASME Transactions on Mechatronics (S1083-4435), 2012, 17(2): 210-217. |
| 14 | Song S, Qiao W, Li B, et al. An Efficient Magnetic Tracking Method Using Uniaxial Sensing Coil[J]. IEEE Transactions on Magnetics (S0018-9464), 2014, 50(1): 31-33. |
| 15 | Wang Q, Yang L, Yu J, et al. Real-Time Magnetic Navigation of a Rotating Colloidal Microswarm under Ultrasound Guidance[J]. IEEE Transactions on Biomedical Engineering (S0018-9294), 2020, 67(12): 3403-3412. |
| 16 | 向茜, 王世庆, 李兴红, 等. 微创手术机器人定位系统的实用设计[J]. 计算机仿真, 2016, 33(8): 322-327. |
| Xiang Qian, Wang Shiqing, Li Xinghong, et al. Practical Design of the Positioning System of Minimally Invasive Surgical Robots[J]. Computer Simulation, 2016, 33(8): 322-327. | |
| 17 | Moriconi S, Zuluaga M A, Jäger H R, et al. Inference of Cerebrovascular Topology with Geodesic Minimum Spanning Trees[J]. IEEE Transactions on Medical Imaging (S0278-0062), 2019, 38(1): 225-239. |
| 18 | Plötner P, Harada K, Sugita N, et al. Theoretical Analysis of Magnetically Propelled Microrobots in the Cardiovascular System[C]// The 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Chicago, IL, USA: IEEE, 2014: 870-873. |
| 19 | 沈熙宁. 电磁场与电磁波[M]. 北京: 科学出版社, 2006. |
| Shen Xining. Electromagnetic Fields and Waves[M]. Beijing: Science Press, 2006. | |
| 20 | Cha E, Chung H, Kim E Y, et al. Unpaired Training of Deep Learning tMRA for Flexible Spatio-Temporal Resolution[J]. IEEE Transactions on Medical Imaging (S0278-0062), 2021, 40(1): 166-179. |
| 21 | Hu C, Song S, Wang X, et al. A Novel Positioning and Orientation System Based on Three-Axis Magnetic Coils[J]. IEEE Transactions on Magnetics (S0018-9464), 2012, 48(7): 2211-2219. |
| [1] | Dong Zhiming, Hu Zhongqi, Dai Haoran, Gao Jiancheng. An Automated Generation Method for Combat Simulation Scenarios Based on Large Language Models [J]. Journal of System Simulation, 2026, 38(5): 1129-1145. |
| [2] | Li Xiaonan, Chao Tao, Ma Ping, Yang Ming, Wang Yuxuan. Robust Identification of Black-box Nonlinear SSM Using Expectation-maximization [J]. Journal of System Simulation, 2026, 38(5): 1146-1158. |
| [3] | Liu Yingang, Ma Ming, Zhang Ronghua. Dynamic Task Planning for Wargaming Based on Large Language Models [J]. Journal of System Simulation, 2026, 38(5): 1187-1204. |
| [4] | Su Hongjia, Zhang Cheng, Liu Fei. SoS Effectiveness Evaluation Method Based on Fuzzy Functional Dependency Network Analysis [J]. Journal of System Simulation, 2026, 38(5): 1224-1238. |
| [5] | Mei Huawei, Yang Penghui, Yu Yang. Ultra-short-term Photovoltaic Power Prediction Based on Improved PatchTST Considering Data Drift [J]. Journal of System Simulation, 2026, 38(5): 1239-1254. |
| [6] | Li Quan, Su Peng, Wan Haiying, Zhang Chengxi, He Zhijian, Ni Yiyang, Zhao Zhonggai, Liu Fei. Modeling of Penicillin Fermentation Process Based on a Multi-stage LHS-EPRCC Method [J]. Journal of System Simulation, 2026, 38(5): 1255-1276. |
| [7] | Zhou Zicong, Zeng Junjie, Hu Yue, Zhu Zhengqiu, Yin Quanjun. Multi-agent Reinforcement Learning Method for Wargame Simulation Based on Suboptimal Demonstration Guidance [J]. Journal of System Simulation, 2026, 38(5): 1277-1289. |
| [8] | Shi Min, Guo Shisheng, Wang Suqin, Li Zhaoxin, Zhu Dengming. Annotation-free 6-DoF Grasp Detection Method Integrating Physical and Geometric Priors [J]. Journal of System Simulation, 2026, 38(5): 1290-1302. |
| [9] | Jiang Yanji, Xiao Xingyi, Dong Hao, Yu Miao, Huang Jinshan, Liu Daqian, Fei Bowen. Detection Method for 3D Lanes Based on Graph Relationship Optimization Integrating Point and Lane Features [J]. Journal of System Simulation, 2026, 38(5): 1303-1319. |
| [10] | Zhang Xin, Zhang Ping, Zhang Chen, Liu Wei, Han Boyang. Research on Calculation Model of Excavation Resistance Under Heterogeneous Soil Conditions [J]. Journal of System Simulation, 2026, 38(5): 1320-1332. |
| [11] | Wang Wei, Liu Dong, Cui Xinhao, Li Bo, Xiao Yiyong, Ren Yi. Multi-level Digital Model of Dynamic Earned Value Management for Complex Engineering Projects and Its Applications [J]. Journal of System Simulation, 2026, 38(5): 1350-1364. |
| [12] | Peng Lijun, Su Tingqi, Liu Peijin, He Lin, Zhou Xiewu, Zhang Minxin. Detection Method for Laboratory PPE Compliance Wearing Based on Human Key Points [J]. Journal of System Simulation, 2026, 38(5): 1365-1382. |
| [13] | Teng Jing, Tong Wencong, Zhang Zhongjie, Yao Xing, Li Junxian. Automatic Speed Guidance Method and Simulation Evaluation for Trams at Intersections [J]. Journal of System Simulation, 2026, 38(5): 1426-1439. |
| [14] | Jiang Shengchao, Pei Yunqing, Zhai Hongying, Wu Guojian, Gao Fang. Power Flow Calculation Based on Block-encoded Adiabatic Quantum Newton-Raphson Method [J]. Journal of System Simulation, 2026, 38(5): 1453-1465. |
| [15] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
