

系统仿真学报 ›› 2026, Vol. 38 ›› Issue (5): 1159-1173.doi: 10.16182/j.issn1004731x.joss.25-0599
梁隆硝, 毛剑琳, 王妮娅, 房程远, 周雯娜
收稿日期:2025-06-25
修回日期:2025-09-06
出版日期:2026-05-21
发布日期:2026-05-29
通讯作者:
毛剑琳
第一作者简介:梁隆硝(2000-),男,硕士生,研究方向为多机器人路径规划。
基金资助:Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna
Received:2025-06-25
Revised:2025-09-06
Online:2026-05-21
Published:2026-05-29
Contact:
Mao Jianlin
摘要:
针对传统CBS(conflict-based search)框架冲突树(conflict tree,CT)扩展存在链式效应、求解效率不足的问题,提出一种基于规划裕量的最小裕量优先CBS算法。在底层
中图分类号:
梁隆硝,毛剑琳,王妮娅等 . 最小规划裕量优先的多机器人CBS路径规划算法[J]. 系统仿真学报, 2026, 38(5): 1159-1173.
Liang Longxiao,Mao Jianlin,Wang Niya,et al . Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First[J]. Journal of System Simulation, 2026, 38(5): 1159-1173.
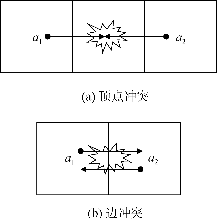
图1
顶点冲突和边冲突
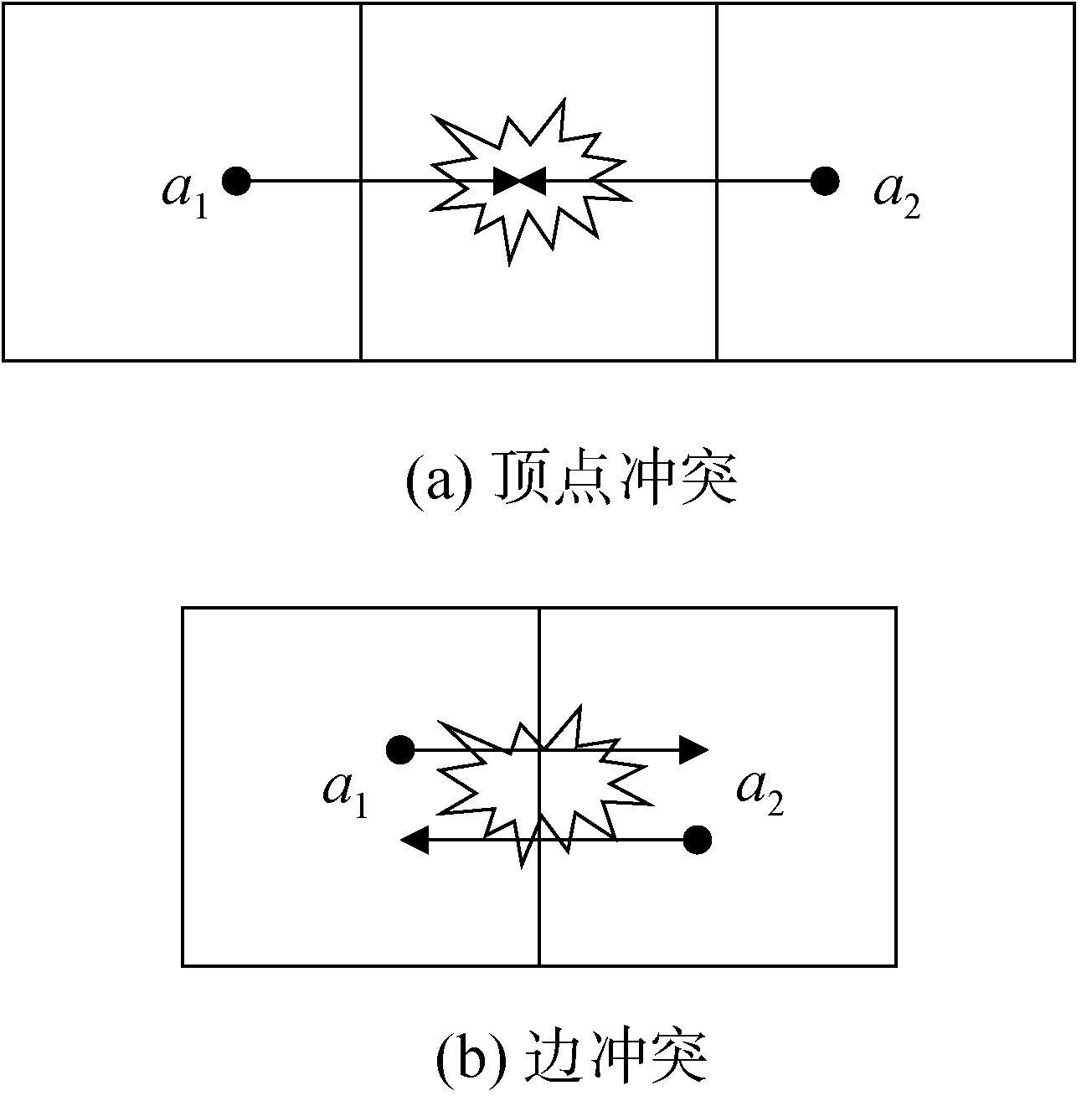
图2
5×5地图下的链式效应
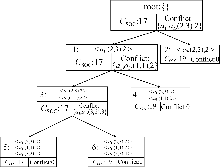
图3
链式效应下的CT扩展
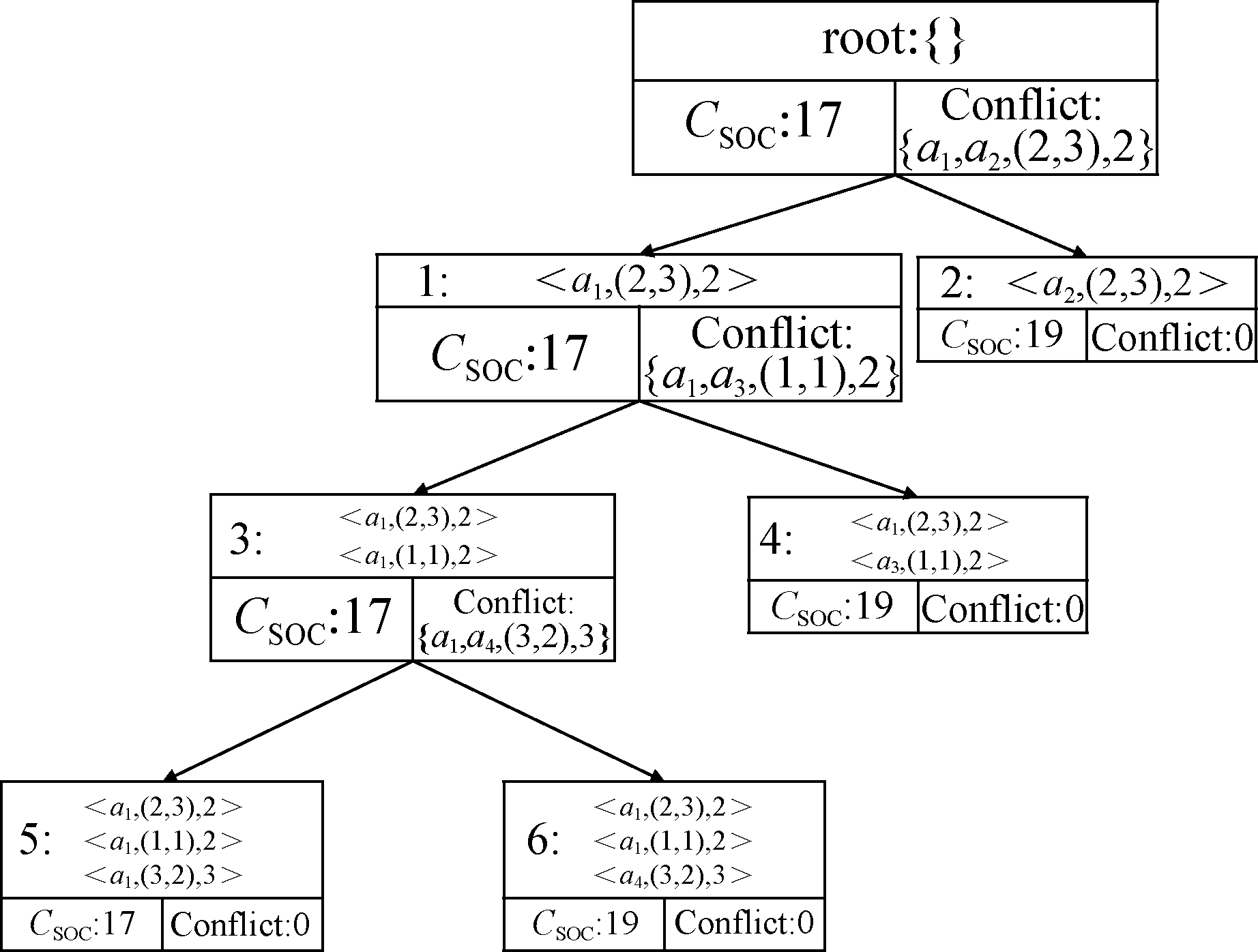
表1
机器人路径规划
| 路径 | t=0 | t=1 | t=2 | t=3 | t=4 | t=5 | t=6 |
|---|---|---|---|---|---|---|---|
| (0,3) | (1,3) | (2,3) | (3,3) | (3,2) | (3,1) | (3,0) | |
| (2,1) | (2,2) | (2,3) | (2,4) | ||||
| (0,3) | (1,3) | (1,2) | (1,1) | (1,0) | (2,0) | (3,0) | |
| (0,3) | (3,1) | (2,1) | (1,1) | (1,0) | |||
| (4,1) | (1,3) | (1,2) | (2,2) | (3,2) | (3,1) | (3,0) | |
| (0,3) | (2,4) | (3,4) | (3,3) | (3,2) | |||
| (0,3) | (1,3) | (1,2) | (2,2) | (2,1) | (2,0) |
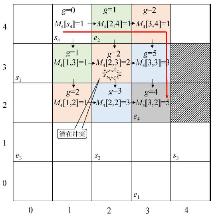
图4
规划裕量的计算
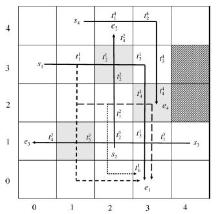
图5
最小裕量优先避免链式效应
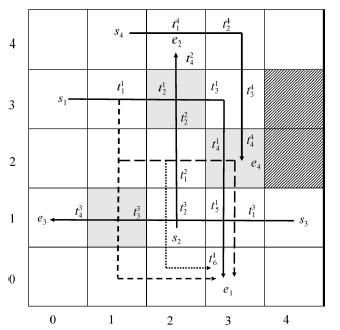
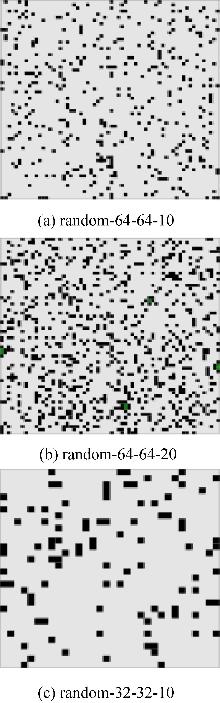
图6
测试地图
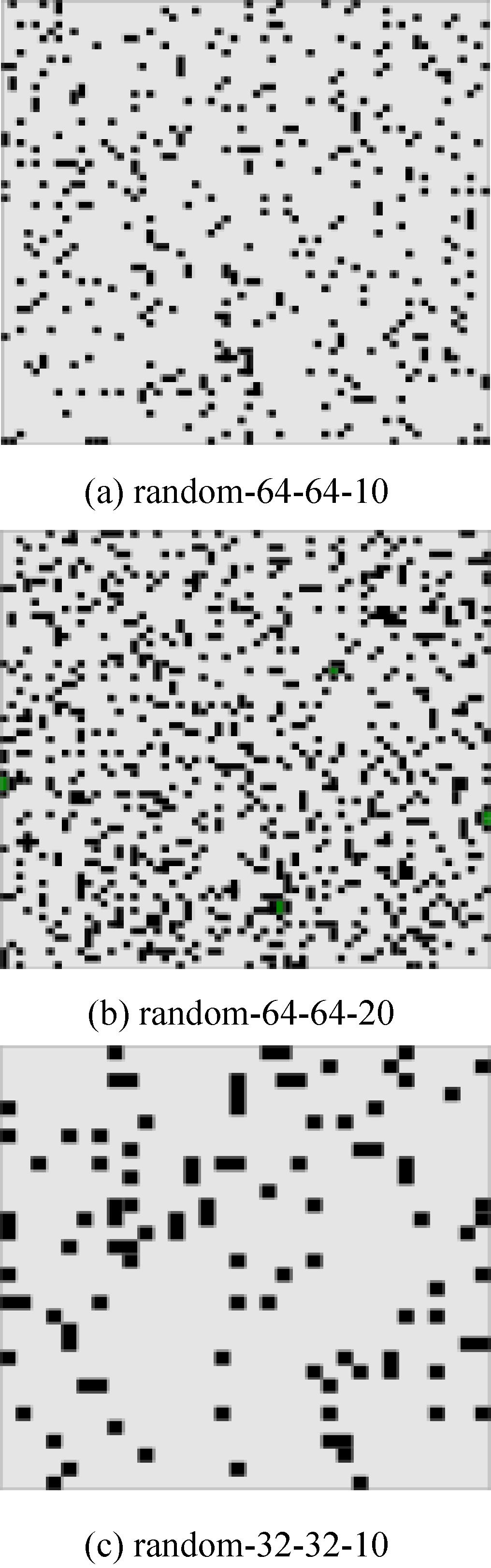

图7
各算法的求解成功率及求解时间统计
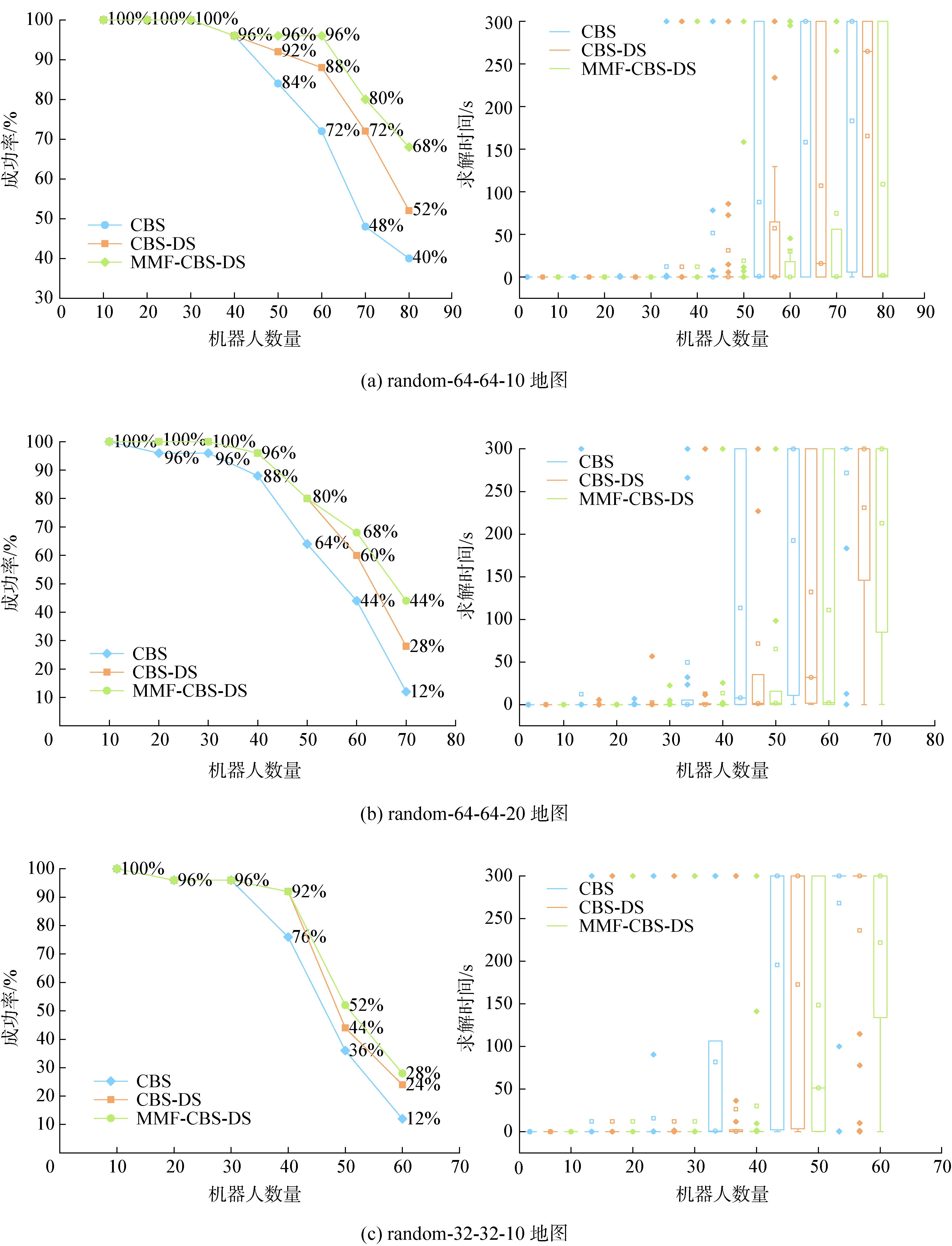
表2
各算法的平均路径总代价统计
| 地图 | 机器人数量 | HCA* | LaCAM* | PBS | MMF-CBS-DS |
|---|---|---|---|---|---|
| random-64-64-10 | 10 | 430.8 | 439.4 | 429.9 | 429.9 |
| 20 | 864.3 | 901.1 | 863.0 | 863.0 | |
| 30 | 1 268.1 | 1 337.2 | 1 267.5 | 1 267.5 | |
| 40 | 1 701.4 | 1 811.1 | 1 700.0 | 1 691.5 | |
| 50 | 2 149.8 | 2 270.5 | 2 137.9 | 2 111.7 | |
| 60 | 2 593.0 | 2 754.4 | 2 576.9 | 2 532.9 | |
| 70 | 3 031.5 | 3 287.8 | 3 006.5 | 3 150.8 | |
| 80 | 3 456.0 | 3 762.3 | 3 431.7 | 3 374.8 | |
| random-64-64-20 | 10 | 457.0 | 463.8 | 456.1 | 456.1 |
| 20 | 918.4 | 934.9 | 906.2 | 906.2 | |
| 30 | 1 354.2 | 1 411.1 | 1 332.5 | 1 332.4 | |
| 40 | 1 810.2 | 1 910.2 | 1 777.3 | 1 777.2 | |
| 50 | 2 278.3 | 2 386.0 | 2 213.0 | 2 212.9 | |
| 60 | 2 735.4 | 2 900.0 | 2 632.6 | 2 632.3 | |
| 70 | 3 200.2 | 3 443.0 | 3 076.0 | 3 062.7 | |
| random-32-32-10 | 10 | 222.8 | 229.2 | 222.4 | 222.4 |
| 20 | 448.4 | 477.1 | 447.2 | 447.2 | |
| 30 | 670.8 | 737.8 | 664.3 | 664.1 | |
| 40 | 896.8 | 999.6 | 887.3 | 887.1 | |
| 50 | 1 132.2 | 1 286.5 | 1 092.0 | 1 091.0 | |
| 60 | 1 365.4 | 1 507.8 | 1 276.5 | 1 215.3 |
表3
各算法的平均CT节点数量统计
| 地图 | 机器人数量 | CBS | CBS-DS | MMF-CBS-DS |
|---|---|---|---|---|
| random-64-64-10 | 10 | 1.6 | 1.6 | 1.2 |
| 20 | 4.6 | 4.5 | 3.4 | |
| 30 | 355.7 | 49.4 | 40.3 | |
| 40 | 2 134.3 | 327 | 108.3 | |
| 50 | 32 644.0 | 2 095.0 | 290.7 | |
| 60 | 31 133.6 | 4 632.8 | 410.6 | |
| 70 | 54 797.0 | 4 608.0 | 566.5 | |
| 80 | 31 797.7 | 4 755.7 | 2 999.8 | |
| random-64-64-20 | 10 | 1.2 | 1.2 | 1.4 |
| 20 | 21.6 | 11.4 | 11.0 | |
| 30 | 426.0 | 136.1 | 78.1 | |
| 40 | 21 166.8 | 2 412.0 | 690.1 | |
| 50 | 22 588.4 | 6 559.5 | 2 648.7 | |
| 60 | 438 308.1 | 57 003.9 | 5 491.0 | |
| 70 | 525 043.7 | 71 492.3 | 70 817.7 | |
| random-32-32-10 | 10 | 15.6 | 6.3 | 6.5 |
| 20 | 49.3 | 19.0 | 16.5 | |
| 30 | 46 735.5 | 1 286.7 | 383.6 | |
| 40 | 211 694.2 | 11 066.5 | 3 057.3 | |
| 50 | 236 498.5 | 28 155.9 | 4 887.0 | |
| 60 | 4 997.0 | 2 668.5 | 487.0 |
表4
各算法的CT节点数量的标准差统计
| 地图 | 机器人数量 | CBS | CBS-DS | MMF-CBS-DS |
|---|---|---|---|---|
| random-64-64-10 | 10 | 1.7 | 1.7 | 0.88 |
| 20 | 4.4 | 4.3 | 4.7 | |
| 30 | 1 722.0 | 181.5 | 170.7 | |
| 40 | 5 103.3 | 703.0 | 242.9 | |
| 50 | 126 960.1 | 8 197.8 | 689.8 | |
| 60 | 111 600.8 | 16 178.3 | 987.4 | |
| 70 | 169 686.6 | 10 306.5 | 1 095.7 | |
| 80 | 40 658.4 | 7 363.9 | 4 558.8 | |
| random-64-64-20 | 10 | 0.88 | 1.2 | 0.88 |
| 20 | 53.1 | 99.2 | 17.7 | |
| 30 | 1 099.1 | 655.1 | 327.5 | |
| 40 | 66 633.8 | 6 251.8 | 4 363.4 | |
| 50 | 37 193.2 | 24 750.2 | 12 293.2 | |
| 60 | 891 989.6 | 791 882.1 | 106 313.1 | |
| 70 | 832 745.8 | 918 059.7 | 110 843.1 | |
| random-32-32-10 | 10 | 63.8 | 19.4 | 22.8 |
| 20 | 149.5 | 49.4 | 47.0 | |
| 30 | 224 965.4 | 4 852.1 | 1 240.5 | |
| 40 | 501 823.9 | 18 364.6 | 7 332.8 | |
| 50 | 498 414.6 | 50 606.5 | 4 887.0 | |
| 60 | 6 861.8 | 3 461.3 | 585.5 |
图8
根节点冲突数量
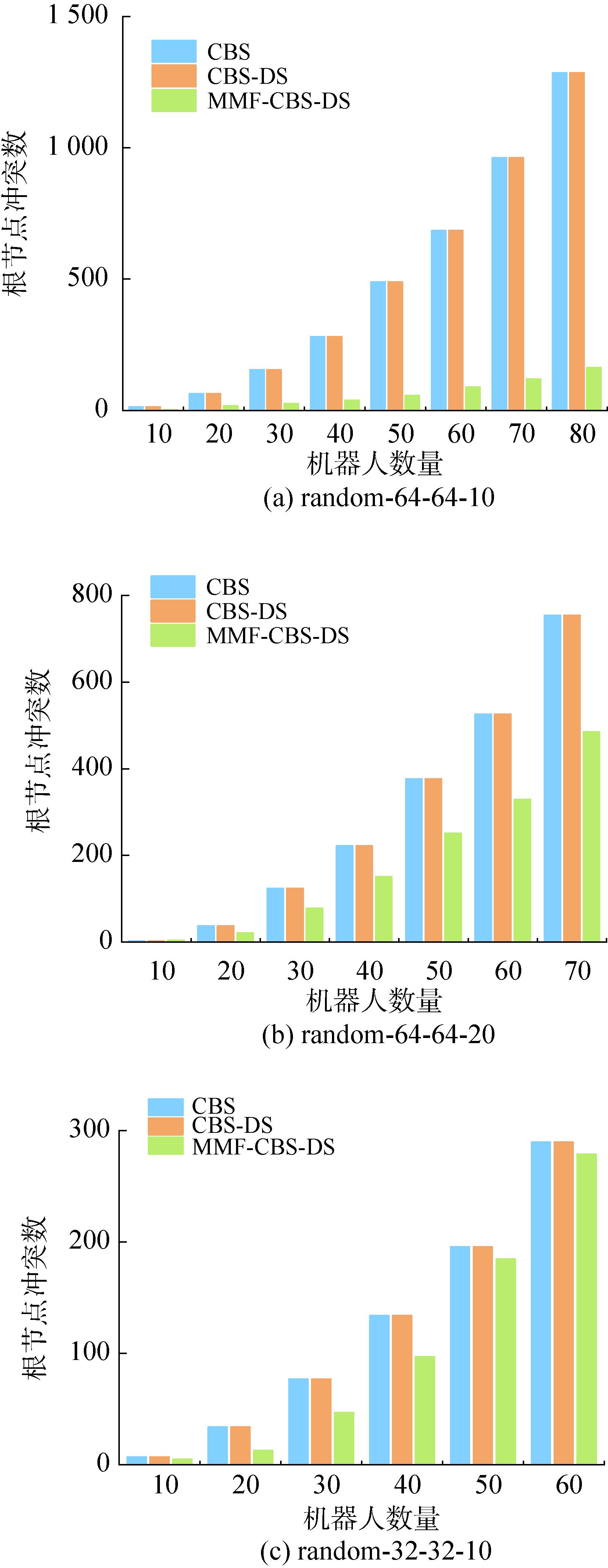
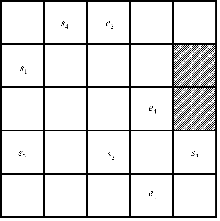
图9
5×5固定任务
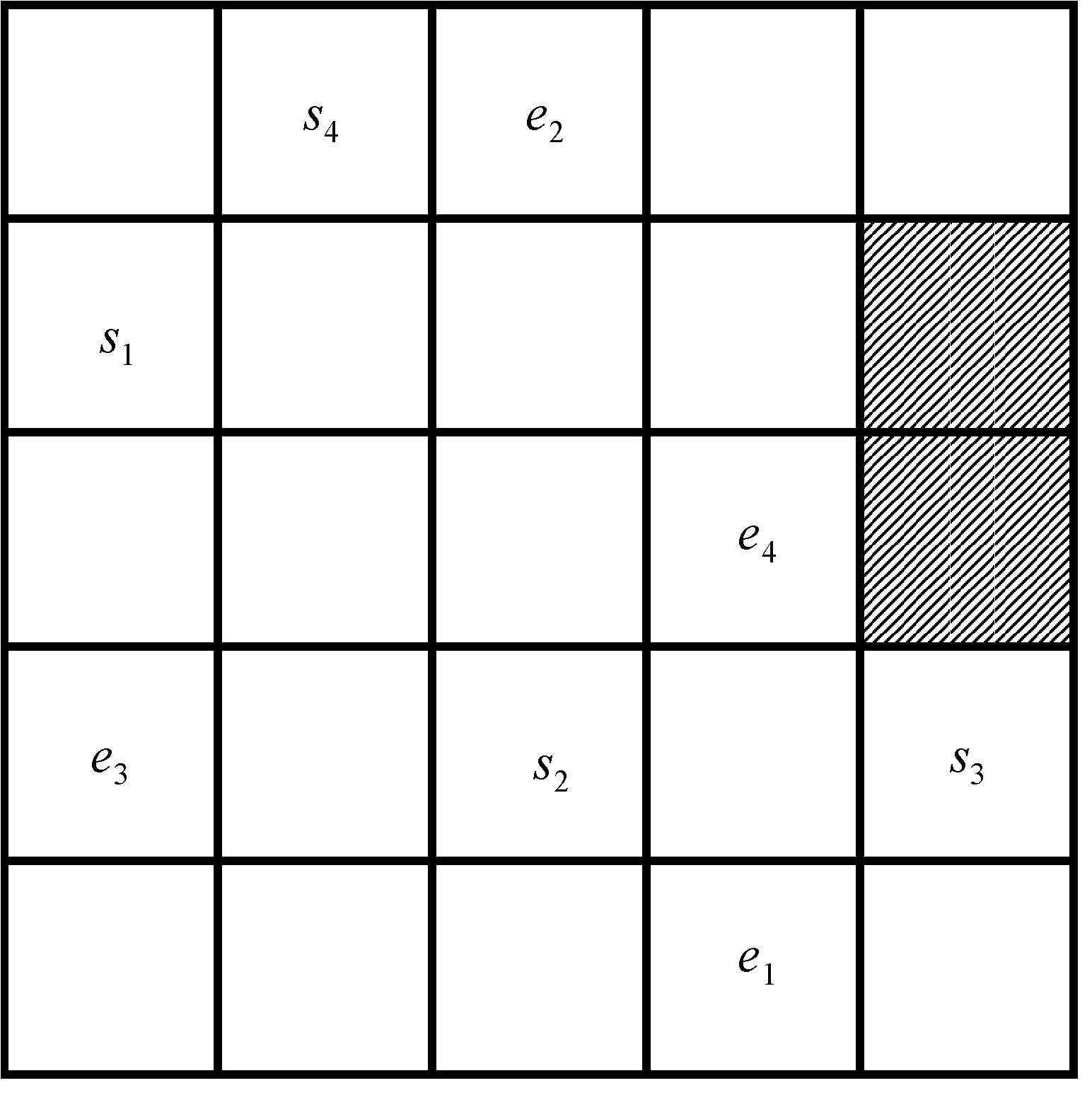
表5
测试结果
| 算法 | SOC | CT节点数 |
|---|---|---|
| CBS | 17 | 7 |
| CBS-DS | 17 | 7 |
| MMF-CBS-DS | 17 | 1 |
| [1] | 张书凡, 毛剑琳, 张凯翔, 等. 面向不确定性的多机器人路径鲁棒规划研究综述[J]. 控制与决策, 2024, 39(12): 3873-3888. |
| Zhang Shufan, Mao Jianlin, Zhang Kaixiang, et al. Survey on Robust Multi-robot Path Planning Under Uncertainty[J]. Control and Decision, 2024, 39(12): 3873-3888. | |
| [2] | Bai Yifan, Kotpalliwar Shruti, Kanellakis Christoforos, et al. Multi-agent Path Planning Based on Conflict-based Search (CBS) Variations for Heterogeneous Robots[J]. Journal of Intelligent & Robotic Systems, 2025, 111(1): 26. |
| [3] | 王雪霖. 基于冲突搜索的动态环境实时多智能体路径规划[D]. 青岛: 青岛科技大学, 2024. |
| Wang Xuelin. Real-time Multi-agent Path Planning in Dynamc Environments with Conflict-based Search[D]. Qingdao: Qingdao University of Science and Technology, 2024. | |
| [4] | Yu Jingjin, LaValle S M. Optimal Multirobot Path Planning on Graphs: Complete Algorithms and Effective Heuristics[J]. IEEE Transactions on Robotics, 2016, 32(5): 1163-1177. |
| [5] | 林跃杭. 复杂环境下基于跳点的多机器人路径规划算法研究[D]. 成都: 电子科技大学, 2025. |
| Lin Yuehang. Research on Multi-robot Path Planning Algorithm Based on Jump Points in Complex Environments[D]. Chengdu: University of Electronic Science and Technology of China, 2025. | |
| [6] | 王卓然, 文家燕, 谢广明, 等. 基于改进CBS算法的多智能体路径规划[J]. 智能系统学报, 2023, 18(6): 1336-1343. |
| Wang Zhuoran, Wen Jiayan, Xie Guangming, et al. Multi-agent Path Planning Based on Improved CBS Algorithm[J]. CAAI Transactions on Intelligent Systems, 2023, 18(6): 1336-1343. | |
| [7] | Fang Chengyuan, Mao Jianlin, Li Dayan, et al. Regional Constraint Module-based Multi-agent Path Planning Approach for Car-like Agents[J]. Journal of Shanghai Jiaotong University (Science), 2024: 1-11. |
| [8] | 宋钰. 多智能体配送路径规划与十字路口自主交会算法的研究[D]. 太原: 山西大学, 2024. |
| Song Yu. Research on Multi-agent Distribution Path Planning and Autonomous Intersection Algorithm[D]. Taiyuan: Shanxi University, 2024. | |
| [9] | 张云龙. 基于多智能体路径规划的公交车辆排班方法的研究与实现[D]. 北京: 北京邮电大学, 2024. |
| Zhang Yunlong. Research on Implementation of Bus Scheduling Approach Based on Multi-agent Path Planning[D]. Beijing: Beijing University of Posts and Telecommunications, 2024. | |
| [10] | 王子晗. 基于冲突搜索的启发式多智能体路径规划算法研究[D]. 烟台: 烟台大学, 2023. |
| Wang Zihan. Research on Heuristic Multi-agent Path Finding Algorithm for Conflict-based-search[D]. Yantai: Yantai University, 2023. | |
| [11] | 王昱, 张旭秀. 一种结合选择性通信与冲突解决的多智能体路径规划方法[J]. 电子与信息学报, 2025, 47(8): 2830-2840. |
| Wang Yu, Zhang Xuxiu. A Multi-agent Path Finding Strategy Combining Selective Communication and Conflict Resolution[J]. Journal of Electronics & Information Technology, 2025, 47(8): 2830-2840. | |
| [12] | Morris R, Pāsāreanu Corina S, Luckow K, et al. Planning, Scheduling and Monitoring for Airport Surface Operations[C]//The Workshops of the Thirtieth AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2016: 608-614. |
| [13] | Ma Hang, Hönig Wolfgang, Cohen L, et al. Overview: A Hierarchical Framework for Plan Generation and Execution in Multirobot Systems[J]. IEEE Intelligent Systems, 2017, 32(6): 6-12. |
| [14] | 张凯翔, 毛剑琳, 向凤红, 等. 基于讨价还价博弈机制的B-IHCA*多机器人路径规划算法[J]. 自动化学报, 2023, 49(7): 1483-1497. |
| Zhang Kaixiang, Mao Jianlin, Xiang Fenghong, et al. B-IHCA*, a Bargaining Game Based Multi-agent Path Finding Algorithm[J]. Acta Automatica Sinica, 2023, 49(7): 1483-1497. | |
| [15] | Hart P E, Nilsson N J, Raphael B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107. |
| [16] | 吴文君, 王腾达, 孙阳, 等. 多智能体路径规划技术研究综述[J]. 北京工业大学学报, 2024, 50(10): 1263-1272. |
| Wu Wenjun, Wang Tengda, Sun Yang, et al. Survey of Multi-agent Path Finding Technology[J]. Journal of Beijing University of Technology, 2024, 50(10): 1263-1272. | |
| [17] | He Zhibo, Liu Chenguang, Chu Xiumin, et al. Dynamic Anti-collision A-star Algorithm for Multi-ship Encounter Situations[J]. Applied Ocean Research, 2022, 118: 102995. |
| [18] | Standley T. Finding Optimal Solutions to Cooperative Pathfinding Problems[C]//Proceedings of the Twenty-Fourth AAAI Conference on Artificial Intelligence and the Twenty-Second Innovative Applications of Artificial Intelligence Conference and the First Symposium on Educational Advances in Artificial Intelligence. Palo Alto: AAAI Press, 2010: 173-178. |
| [19] | Sharon Guni, Stern Roni, Felner Ariel, et al. Conflict-based Search for Optimal Multi-agent Pathfinding[J]. Artificial Intelligence, 2015, 219: 40-66. |
| [20] | Boyarski Eli, Felner Ariel, Stern Roni, et al. ICBS: The Improved Conflict-based Search Algorithm for Multi-agent Pathfinding[C]//Eighth Annual Symposium on Combinatorial Search. Palo Alto: AAAI Press, 2021: 223-225. |
| [21] | 宣志玮, 毛剑琳, 张凯翔. CBS框架下面向复杂地图的低拓展度A*算法[J]. 电子学报, 2022, 50(8): 1943-1950. |
| Xuan Zhiwei, Mao Jianlin, Zhang Kaixiang. Low-expansion A* Algorithm Based on CBS Framework for Complex Map[J]. Acta Electronica Sinica, 2022, 50(8): 1943-1950. | |
| [22] | Li Jiaoyang, Ruml W, Koenig S. EECBS: A Bounded-suboptimal Search for Multi-agent Path Finding[C]//Proceedings of the Thirty-Fifth AAAI Conference on Artificial Intelligence and the Thirty-Third Conference on Innovative Applications of Artificial Intelligence and the Eleventh Symposium on Educational Advances in Artificial Intelligence. Palo Alto: AAAI Press, 2021: 12353-12362. |
| [23] | Fang Chengyuan, Mao Jianlin, Li Dayan, et al. A Coordinated Scheduling Approach for Task Assignment and Multi-agent Path Planning[J]. Journal of King Saud University-Computer and Information Sciences, 2024, 36(1): 101930. |
| [24] | Silver David. Cooperative Pathfinding[C]//First Artificial Intelligence and Interactive Digital Entertainment Conference. Palo Alto: AAAI Press, 2005: 117-122. |
| [25] | Ma Hang, Harabor Daniel, Stuckey Peter J, et al. Searching with Consistent Prioritization for Multi-agent Path Finding[C]//Proceedings of the Thirty-Third AAAI Conference on Artificial Intelligence and Thirty-First Innovative Applications of Artificial Intelligence Conference and Ninth AAAI Symposium on Educational Advances in Artificial Intelligence. Palo Alto: AAAI Press, 2019: 938. |
| [26] | 张凯翔, 毛剑琳, 宣志玮, 等. 面向关隘地形的分层调度多机器人路径规划[J]. 计算机集成制造系统, 2024, 30(1): 172-183. |
| Zhang Kaixiang, Mao Jianlin, Xuan Zhiwei, et al. Hierarchical Scheduling Based Multi-robot Path Planning for Pass Terrain[J]. Computer Integrated Manufacturing Systems, 2024, 30(1): 172-183. | |
| [27] | Li Haodong, Zhao Tao, Songyi Dian. Prioritized Planning Algorithm for Multi-robot Collision Avoidance Based on Artificial Untraversable Vertex[J]. Applied Intelligence, 2022, 52(1): 429-451. |
| [28] | 杨邹, 毛剑琳, 李大焱, 等. 基于冲突概率反馈的CBS分层多机器人路径规划[J]. 计算机集成制造系统, 2025, 31(9): 3391-3400. |
| Yang Zou, Mao Jianlin, Li Dayan, et al. CBS Hierarchical Multi-agent Path Finding Based on Conflict Probability Feedback[J]. Computer Integrated Manufacturing Systems, 2025, 31(9): 3391-3400. | |
| [29] | Li Jiaoyang, Harabor Daniel, Stuckey Peter J. Disjoint Splitting for Multi-agent Path Finding with Conflict-based Search[C]//Proceedings of the Twenty-Ninth International Conference on Automated Planning and Scheduling. Palo Alto: AAAI Press, 2019: 279-283. |
| [30] | 周雯娜, 毛剑琳, 王妮娅, 等. 基于多地形因素引导的群机器人CBS路径规划算法[J]. 计算机工程与应用, 2026, 62(2): 359-370. |
| Zhou Wenna, Mao Jianlin, Wang Niya, et al. CBS Path Planning Algorithm for Swarm Robots Guided by Multiple Terrain Factors[J]. Computer Engineering and Applications, 2026, 62(2): 359-370. | |
| [31] | Sturtevant N R. Benchmarks for Grid-based Pathfinding[J]. IEEE Transactions on Computational Intelligence and AI in Games, 2012, 4(2): 144-148. |
| [32] | Okumura K. Improving LaCAM for Scalable Eventually Optimal Multi-agent Pathfinding[C]//Proceedings of the Thirty-Second International Joint Conference on Artificial Intelligence. California: IJCAI, 2023: 243-251. |
| [1] | 孟文龙, 濮彦博, 龚亚. 未知环境下融合局部-全局策略的AUV路径规划[J]. 系统仿真学报, 2026, 38(4): 889-902. |
| [2] | 李德权, 熊婉. 基于SAC3Q-HDM的强化学习机器人路径规划[J]. 系统仿真学报, 2026, 38(3): 714-724. |
| [3] | 谢俊, 张琦, 彭延云, 石浩楠, 李东阳, 刘熙. 基于无碰撞轨迹的无人机路径规划方法研究[J]. 系统仿真学报, 2026, 38(3): 808-817. |
| [4] | 朱玲, 李靖, 张朝辉. 基于改进REA*算法的机器人自适应路径规划[J]. 系统仿真学报, 2026, 38(2): 332-345. |
| [5] | 王秉坤, 王越, 杨妹, 张鹏年, 樊浡昊, 唐杰. 基于改进近端策略优化算法的无人车打击策略规划方法[J]. 系统仿真学报, 2026, 38(2): 372-386. |
| [6] | 于逸然, 赖惠成, 高古学, 张过, 彭汪忆楠, 杨龙飞, 黄俊豪. 基于遗传算法和A*算法的多农机协同作业优化方法[J]. 系统仿真学报, 2025, 37(9): 2397-2408. |
| [7] | 倪培龙, 毛鹏军, 王宁, 杨孟杰. 基于改进A-DDQN算法的机器人路径规划[J]. 系统仿真学报, 2025, 37(9): 2420-2430. |
| [8] | 张凯翔, 毛剑琳, 王妮娅, 徐志昊. 针对路径干扰的多机器人分层协作k鲁棒路径规划[J]. 系统仿真学报, 2025, 37(8): 2074-2088. |
| [9] | 万宇航, 朱子璐, 钟春富, 刘永奎, 林廷宇, 张霖. 基于改进PPO算法的机械臂动态路径规划[J]. 系统仿真学报, 2025, 37(6): 1462-1473. |
| [10] | 叶晨, 邵鹏, 张少平, 李文婷, 周腾明. 面向移动机器人路径规划的增强型人工大猩猩算法[J]. 系统仿真学报, 2025, 37(6): 1474-1485. |
| [11] | 张艳, 李炳华, 霍涛, 刘榕. 融合改进A*算法与DWA算法的机器人动态避障方法研究[J]. 系统仿真学报, 2025, 37(6): 1555-1564. |
| [12] | 周晓晖, 李研强, 王勇, 赵德财, 杨逍瑶. 基于双启发式信息蚁群算法的机器人路径规划[J]. 系统仿真学报, 2025, 37(5): 1280-1289. |
| [13] | 喻蝶, 鲍柏仲, 司言, 段暕, 詹小斌, 史铁林. 基于搜索步优化A*算法的移动机器人路径规划[J]. 系统仿真学报, 2025, 37(4): 1041-1050. |
| [14] | 张森, 代强强. 改进型深度确定性策略梯度的无人机路径规划[J]. 系统仿真学报, 2025, 37(4): 875-881. |
| [15] | 贺志刚, 李大焱, 王妮娅, 毛剑琳, 王宁. 一种含链式工作方式的多机器人协作路径规划算法[J]. 系统仿真学报, 2025, 37(4): 953-967. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
