

系统仿真学报 ›› 2024, Vol. 36 ›› Issue (12): 2945-2959.doi: 10.16182/j.issn1004731x.joss.23-1269
艾高航, 李春涛
收稿日期:2023-10-20
修回日期:2023-12-15
出版日期:2024-12-20
发布日期:2024-12-20
通讯作者:
李春涛
第一作者简介:艾高航(1997-),男,硕士生,研究方向为无人机集群。
基金资助:Ai Gaohang, Li Chuntao
Received:2023-10-20
Revised:2023-12-15
Online:2024-12-20
Published:2024-12-20
Contact:
Li Chuntao
摘要:
针对大规模无人机集群跟踪航线飞行时遇到障碍物的规避问题,提出了一种基于分布式模型预测控制结合视野和自适应避障半径的无人机集群避障算法。集群飞行过程中,无人机根据自身位置获取当前时刻的参考航线信息,通过局部信息交互获取周围邻居的预测轨迹,当遇到障碍物时,结合提出的自适应避障半径法以及视野拓扑,有效解决了集群避障时内部安全距离无法保持且部分无人机和障碍物发生碰撞的问题,实现了集群飞行的外部避障与内部防撞。
中图分类号:
艾高航,李春涛 . 基于视野和自适应半径的无人机集群避障算法[J]. 系统仿真学报, 2024, 36(12): 2945-2959.
Ai Gaohang,Li Chuntao . UAV Swarm Obstacle Avoidance Based on Visual Filed and Adaptive Radius[J]. Journal of System Simulation, 2024, 36(12): 2945-2959.

图1
障碍物外接球切面图
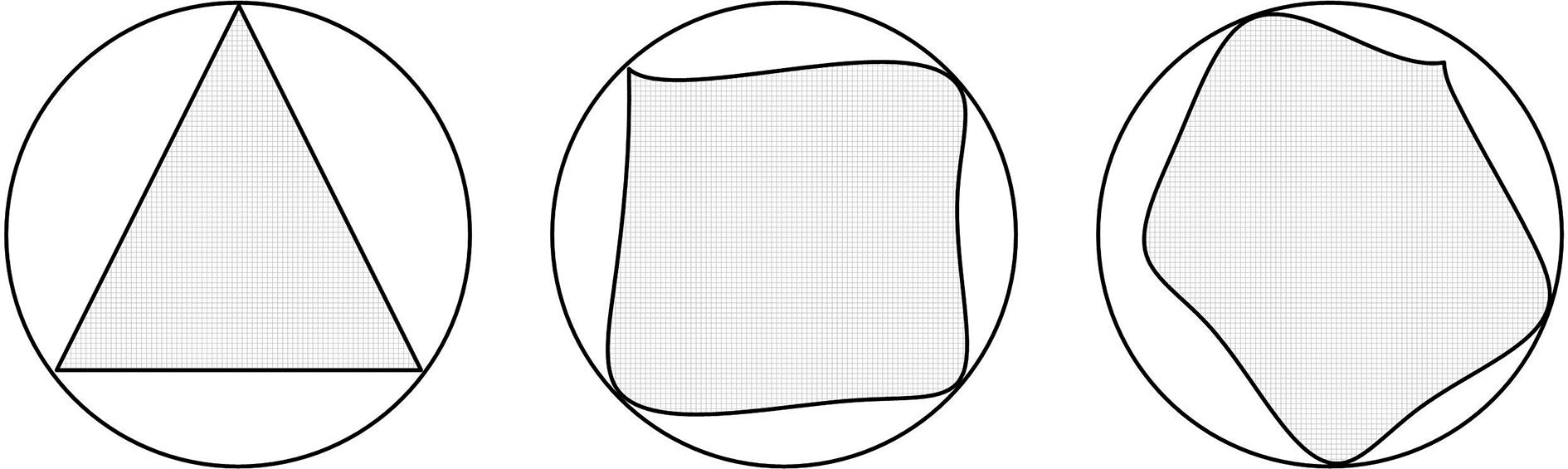
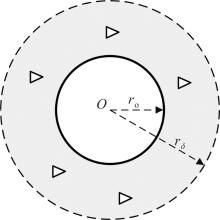
图2
障碍物影响范围二维示意图
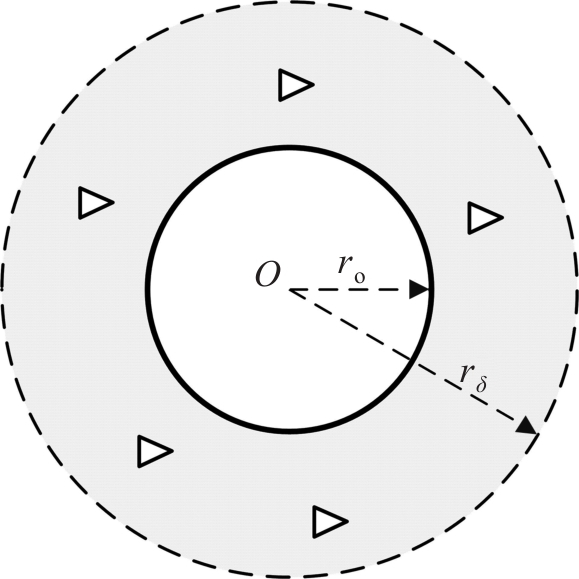
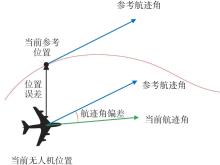
图3
跟踪航线
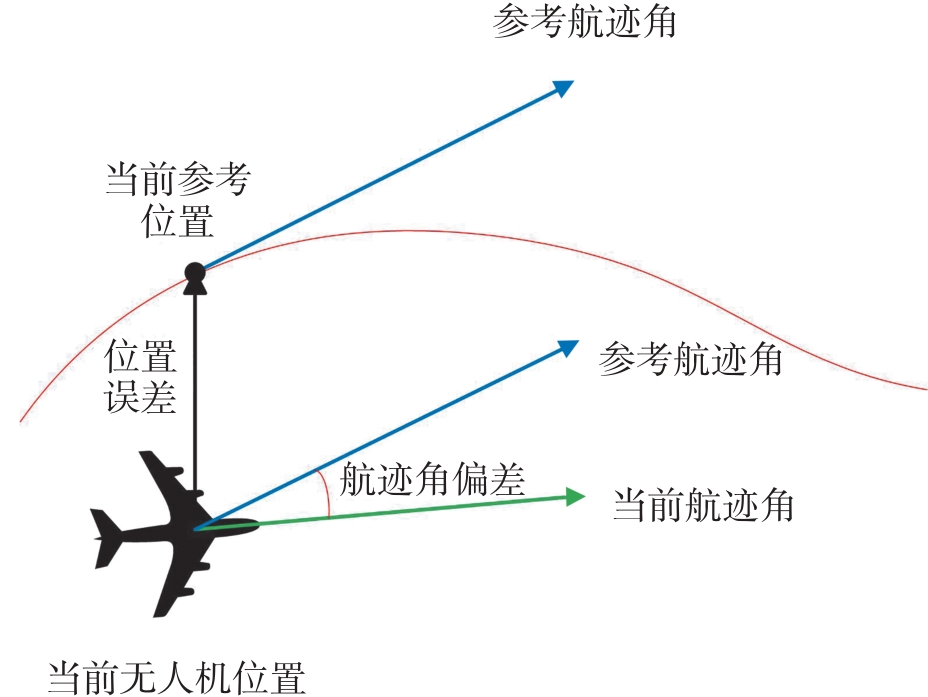
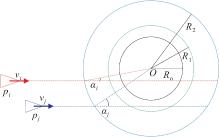
图4
自适应避障半径切面图
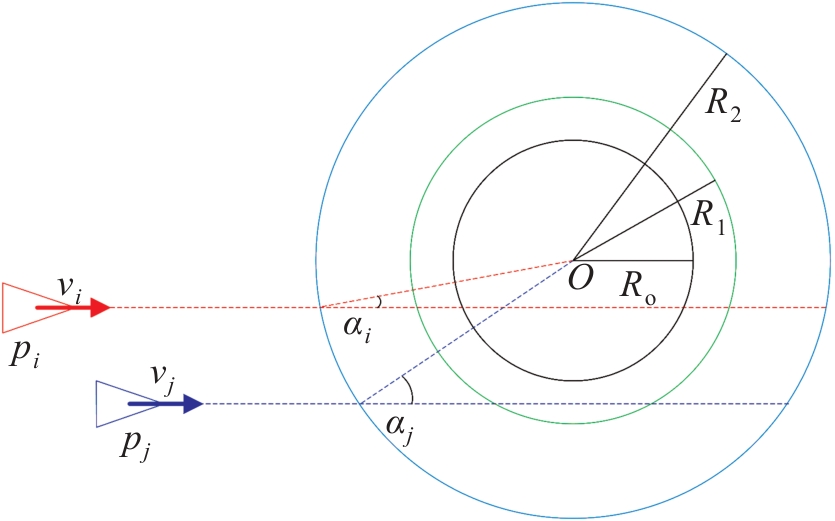

图5
无人机视野示意图

图6
障碍物视野示意图
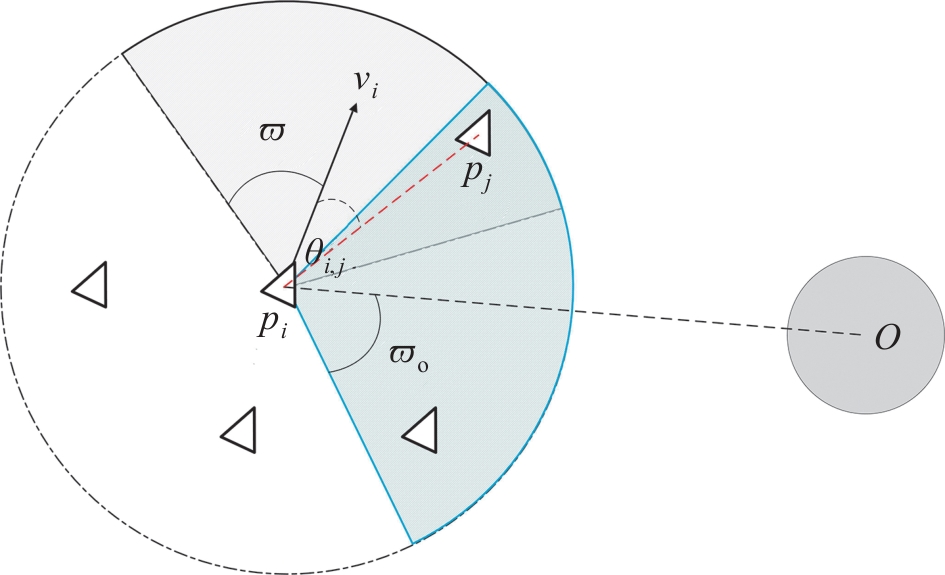
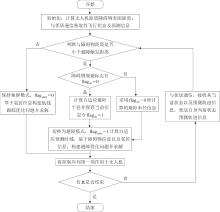
图7
避障算法流程图
表1
无人机初始位置
| 无人机序列 | 位置 | 航迹方位角/rad | 航迹倾斜角/rad |
|---|---|---|---|
| UAV1 | [248, 1, 401] | 0 | 0 |
| UAV2 | [184, 51, 401] | 0 | 0 |
| UAV3 | [184, -50, 401] | 0 | 0 |
| UAV4 | [184, 1, 452] | 0 | 0 |
| UAV5 | [184, 1, 350] | 0 | 0 |
| UAV6 | [184, 1, 400] | 0 | 0 |
| UAV7 | [120, 101, 400] | 0 | 0 |
| UAV8 | [120, -100, 400] | 0 | 0 |
| UAV9 | [120, 1, 502] | 0 | 0 |
| UAV10 | [120, 1, 299] | 0 | 0 |
| UAV11 | [120, 50, 451] | 0 | 0 |
| UAV12 | [120, 50, 350] | 0 | 0 |
| UAV13 | [120, -50, 451] | 0 | 0 |
| UAV14 | [120, -50, 350] | 0 | 0 |
| UAV15 | [120, 1, 400] | 0 | 0 |
| UAV16 | [56, 0, 400] | 0 | 0 |
| UAV17 | [56, 51, 400] | 0 | 0 |
| UAV18 | [56, -51, 400] | 0 | 0 |
| UAV19 | [56, 0, 451] | 0 | 0 |
| UAV20 | [56, 0, 348] | 0 | 0 |
表2
参数设置
| 参数名称 | 集群模式 | 避障模式 |
|---|---|---|
| 1 | 1 | |
| 0.2 | 0.08 | |
| 0.1 | 0.003 | |
| 20 000 | 60 000 | |
| 10 000 | 4 000 | |
| 1 000 | 100 | |
| 1 000 | 100 | |
| 100 | 100 | |
| 100 | 100 | |
| 10 000 | 25 000 | |
| 0 | 100 000 | |
| 10 000 | 0 | |
| 10 000 | 0 |
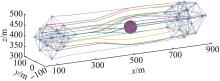
图8
场景Ⅰ中VFAOAR算法仿真图
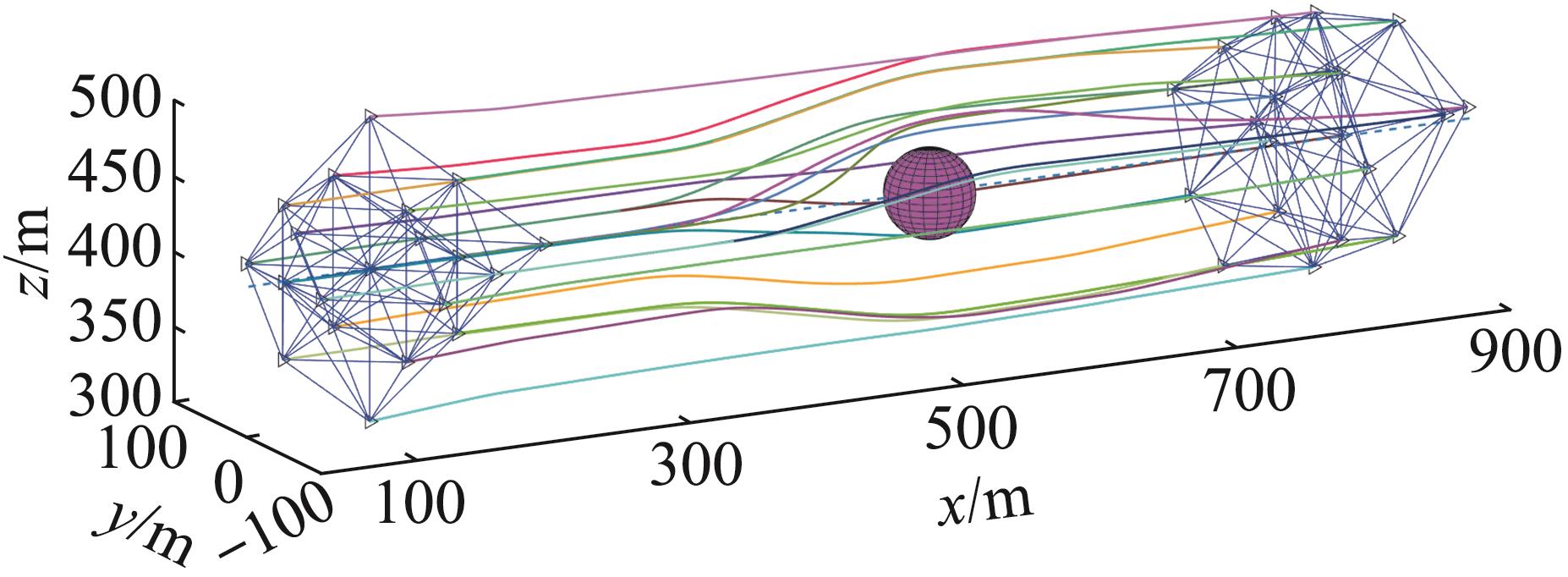
图9
场景Ⅰ中VFAOAR算法主视图
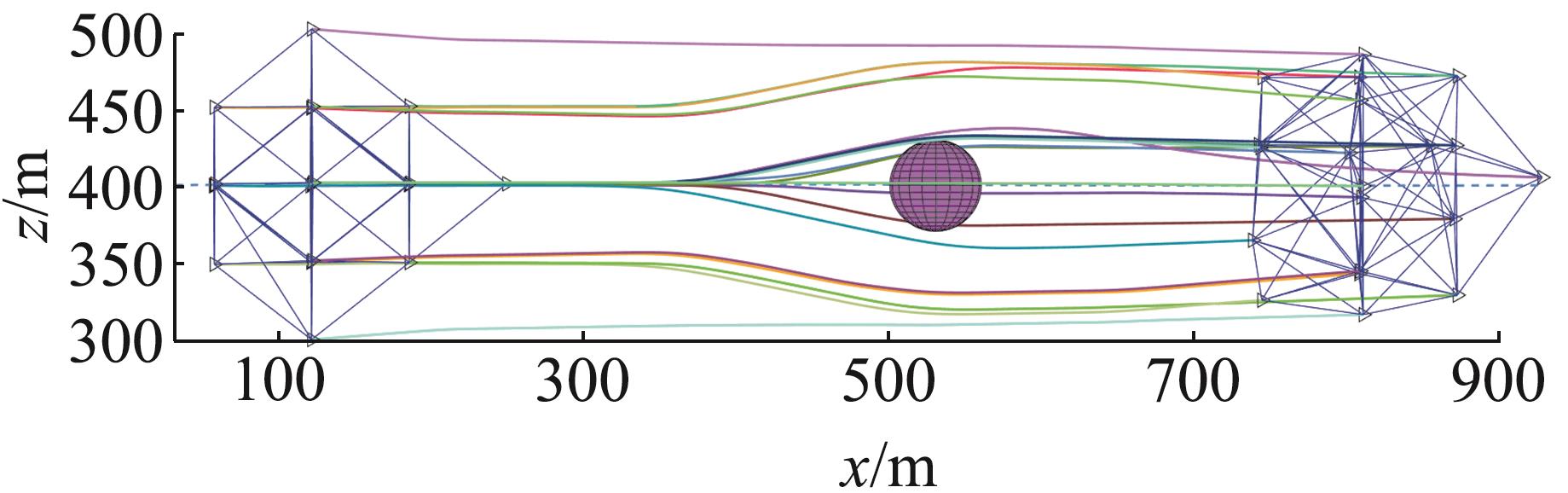
图10
场景Ⅰ中VFAOAR算法俯视图
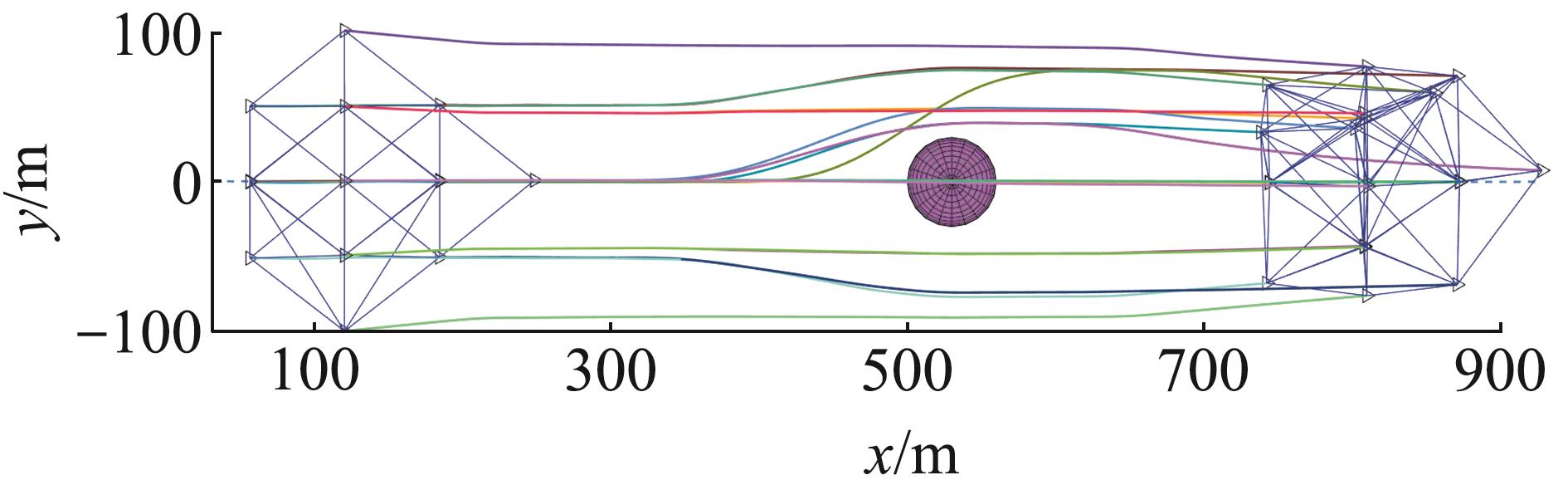
图11
场景Ⅰ中VFVG算法仿真图
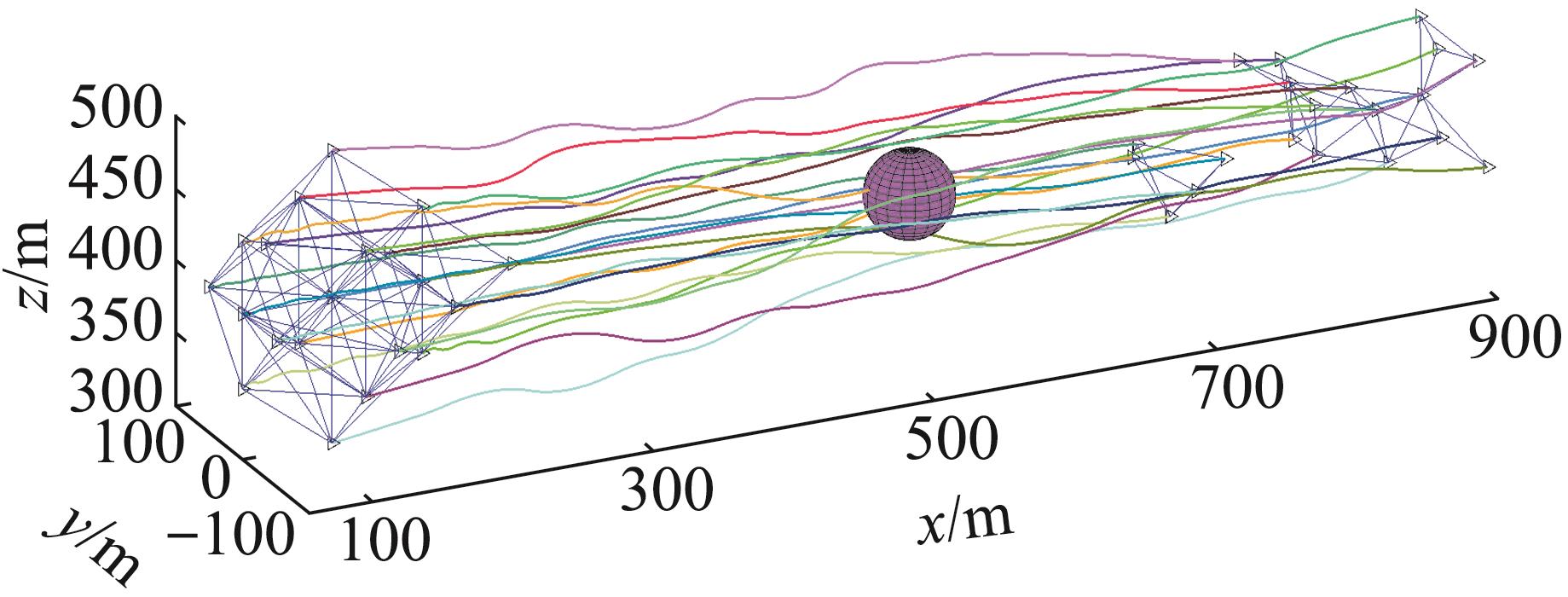
图12
场景Ⅰ中VFVG算法主视图
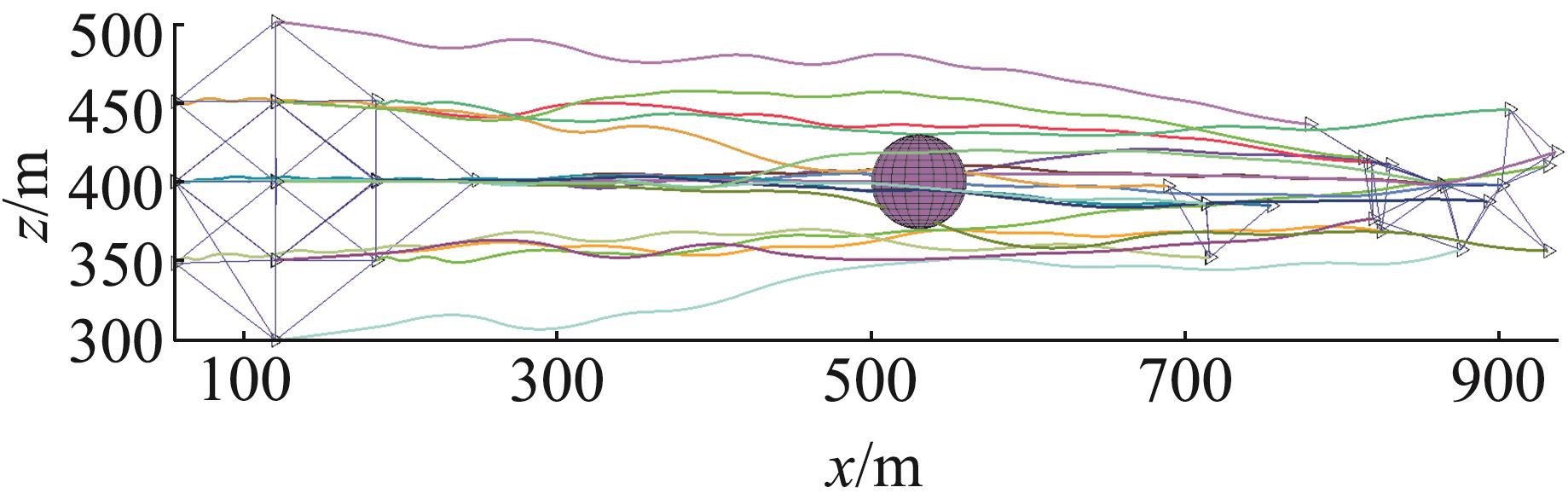
图13
场景Ⅰ中VFVG算法俯视图
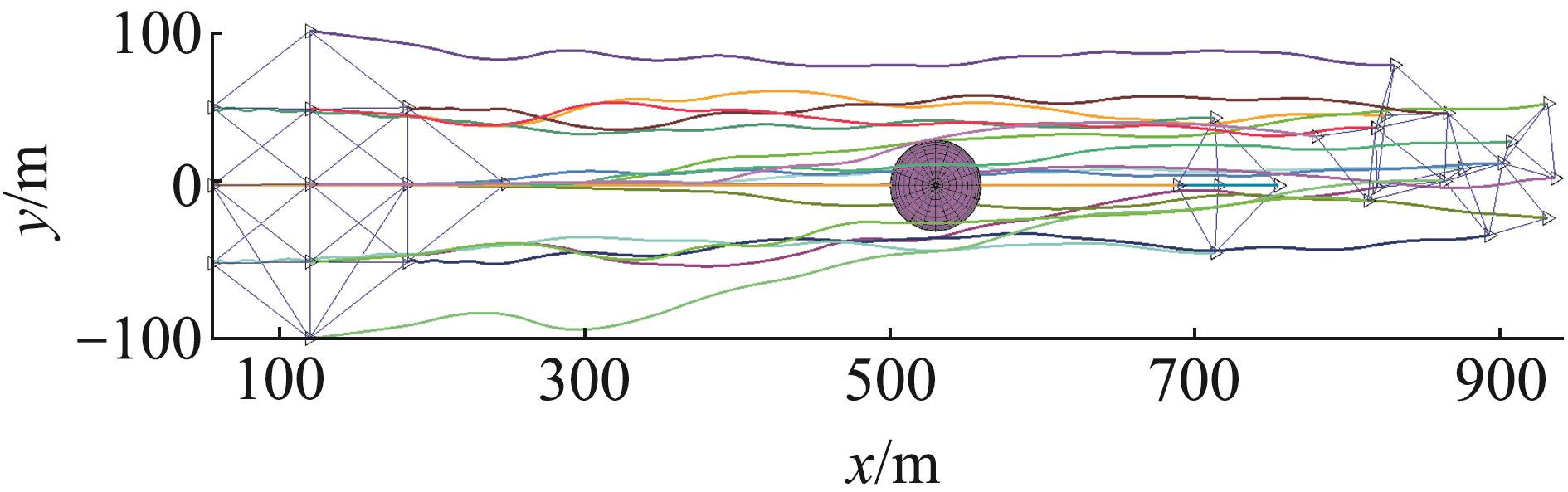
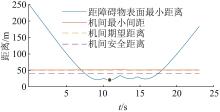
图14
场景Ⅰ VFAOAR算法距离变化图
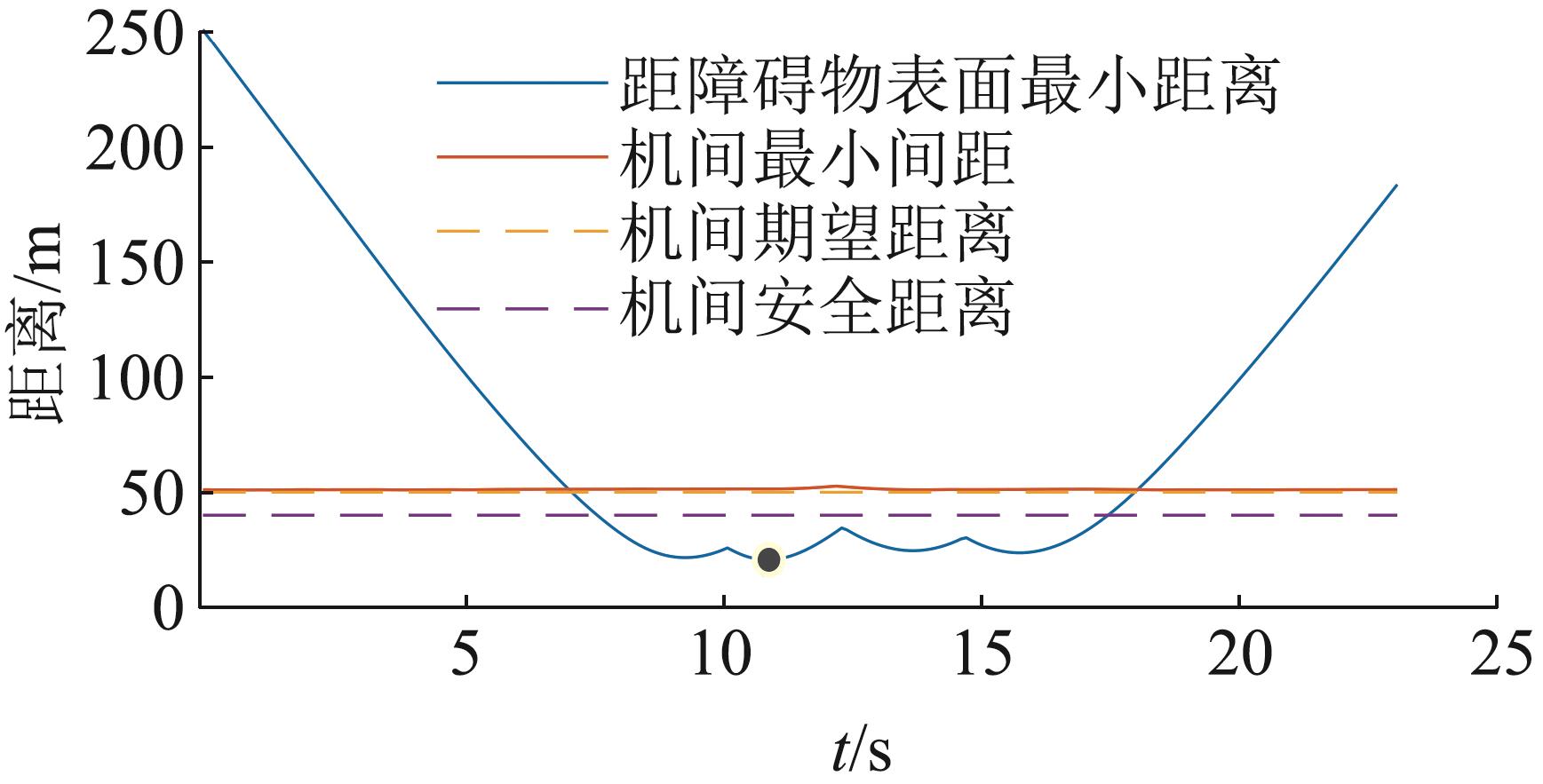
图15
场景Ⅰ VFVG算法距离变化图
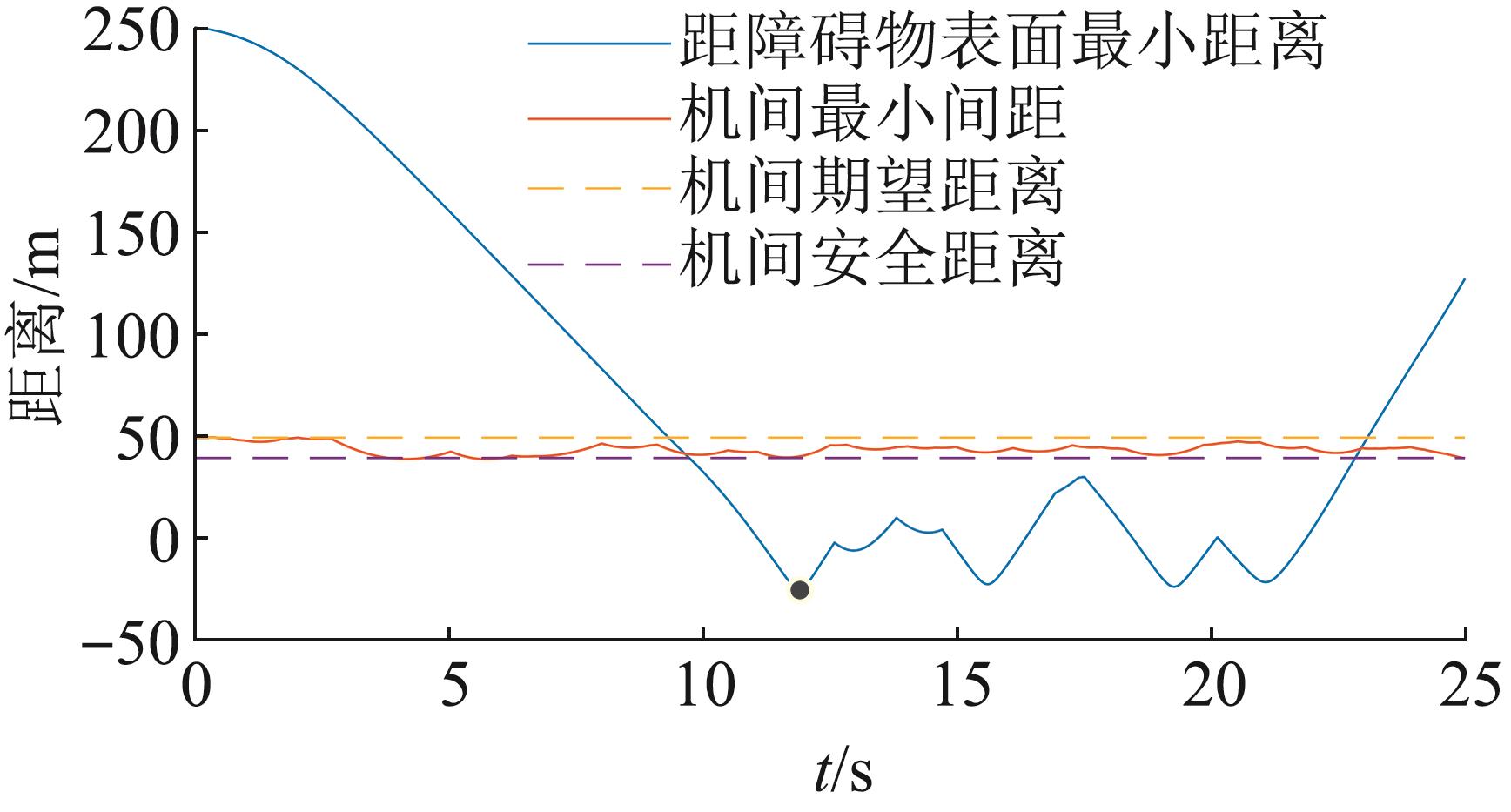
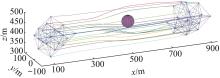
图16
场景Ⅱ中VFAOAR算法仿真图
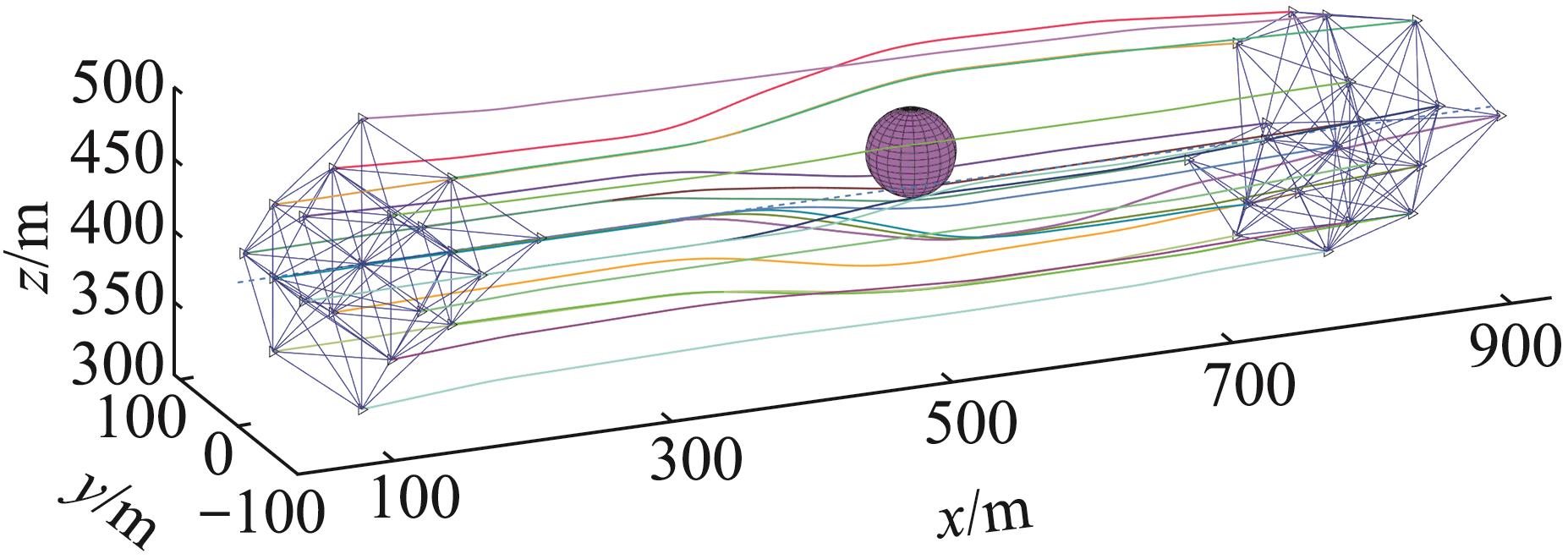
图17
场景Ⅱ VFAOAR算法主视图
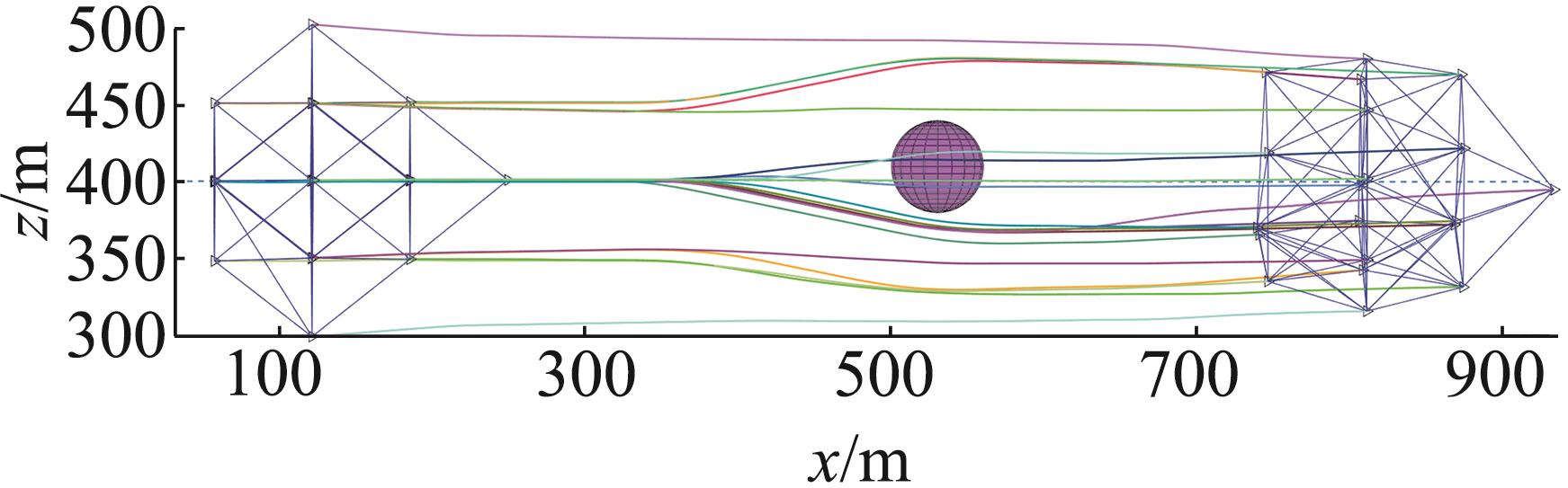
图18
场景Ⅱ VFAOAR算法俯视图
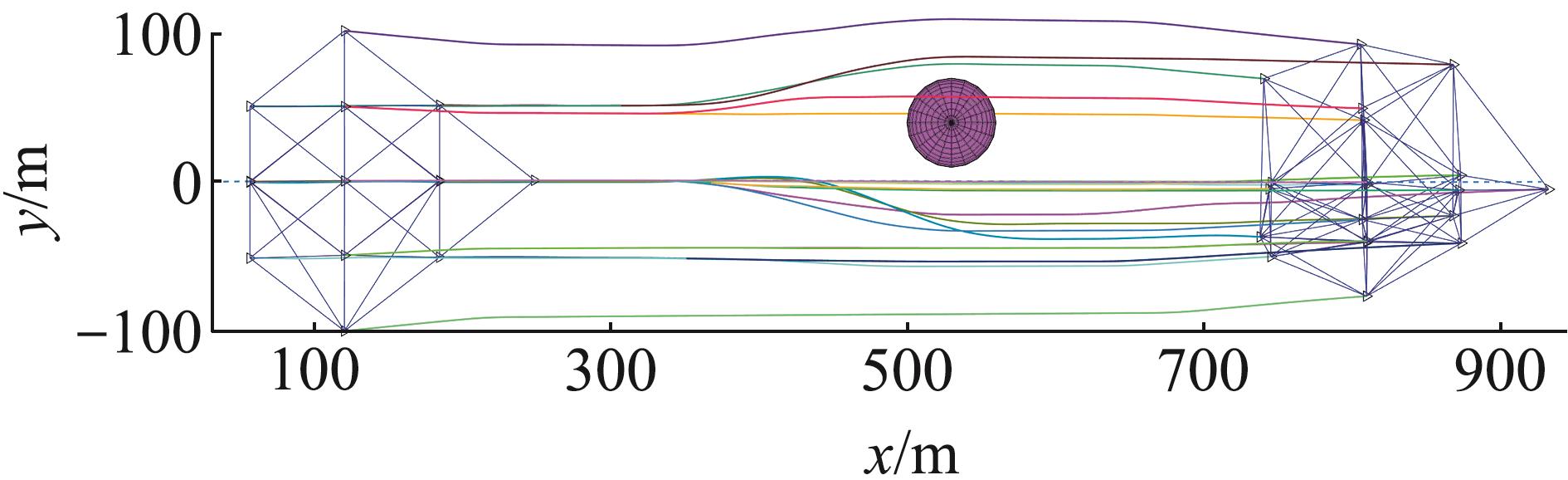
图19
场景Ⅱ VFVG算法仿真图
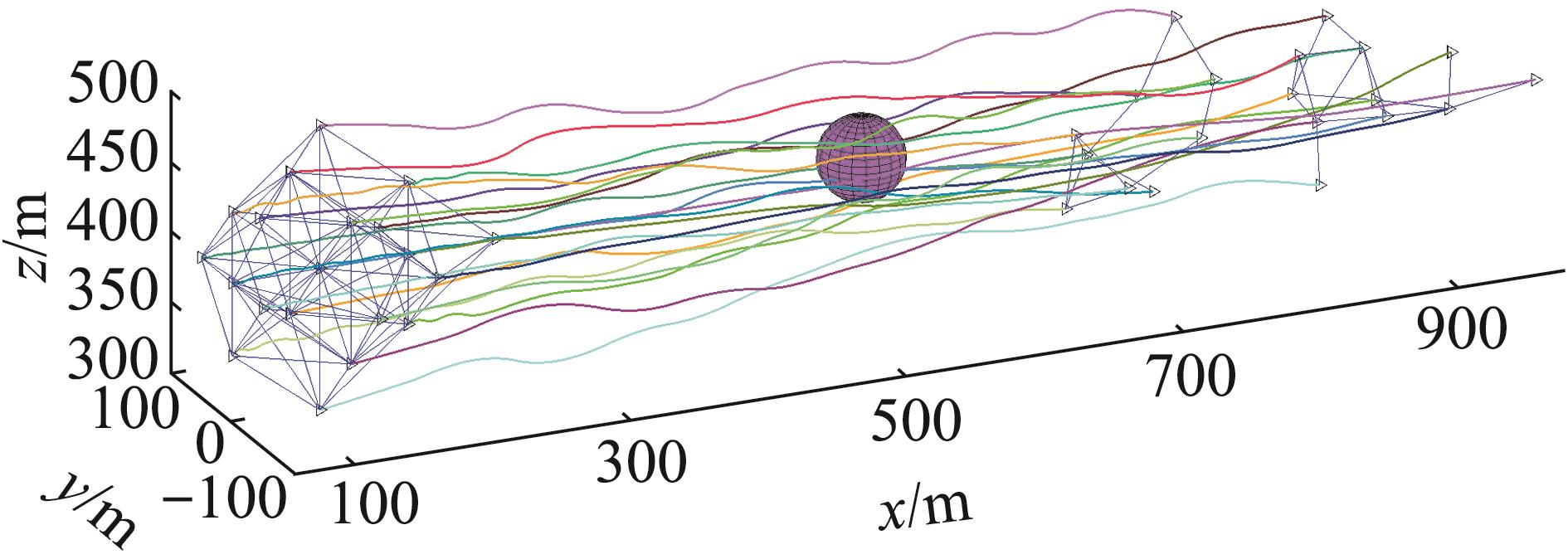
图20
场景Ⅱ VFVG算法主视图
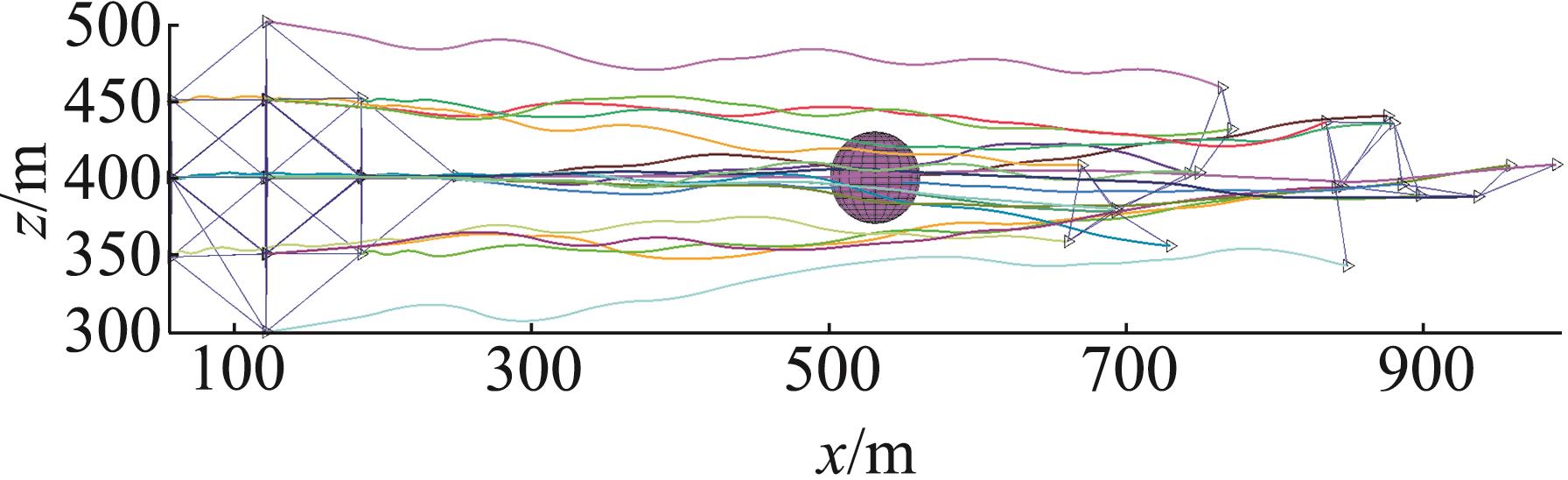

图21
场景Ⅱ VFVG算法俯视图

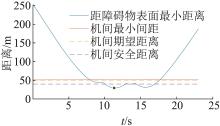
图22
场景Ⅱ VFAOAR算法距离变化图
图23
场景Ⅱ VFVG算法距离变化图
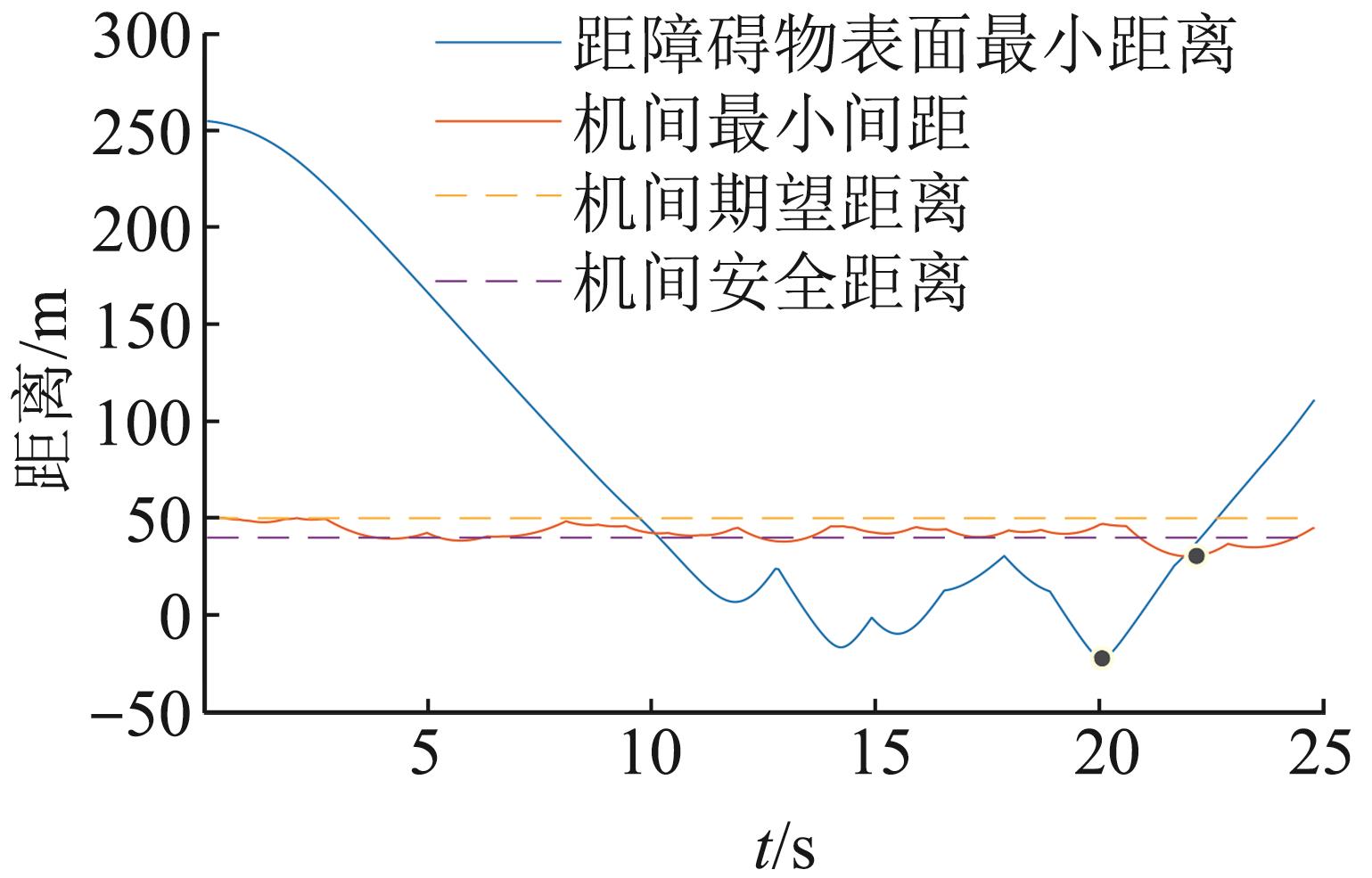
表3
复杂场景无人机初始位置
| 无人机序列 | 位置 | 航迹方位角/rad | 航迹倾斜角/rad |
|---|---|---|---|
| UAV1 | [245, 196, 411] | 0.26 | 0.01 |
| UAV2 | [175, 218, 410] | 0.50 | 0.03 |
| UAV3 | [176, 115, 412] | 0.32 | 0.07 |
| UAV4 | [176, 167, 462] | 0.45 | 0.07 |
| UAV5 | [176, 168, 358] | 0.45 | 0.00 |
| UAV6 | [176, 167, 411] | 0.35 | 0.06 |
| UAV7 | [107, 217, 407] | 0.60 | 0.04 |
| UAV8 | [102, 21, 407] | 0.78 | 0.04 |
| UAV9 | [105, 118, 505] | 0.66 | -0.03 |
| UAV10 | [105, 118, 309] | 0.66 | 0.09 |
| UAV11 | [106, 167, 455] | 0.63 | 0.00 |
| UAV12 | [106, 167, 358] | 0.63 | 0.07 |
| UAV13 | [104, 69, 455] | 0.69 | 0.01 |
| UAV14 | [104, 69, 359] | 0.68 | 0.09 |
| UAV15 | [105, 118, 407] | 0.66 | 0.04 |
| UAV16 | [36, 42, 404] | 0.71 | 0.09 |
| UAV17 | [36, 94, 403] | 0.82 | 0.05 |
| UAV18 | [38, -8, 404] | 0.68 | 0.09 |
| UAV19 | [34, 45, 455] | 0.86 | 0.09 |
| UAV20 | [34, 45, 351] | 0.86 | 0.03 |
图24
复杂场景仿真图
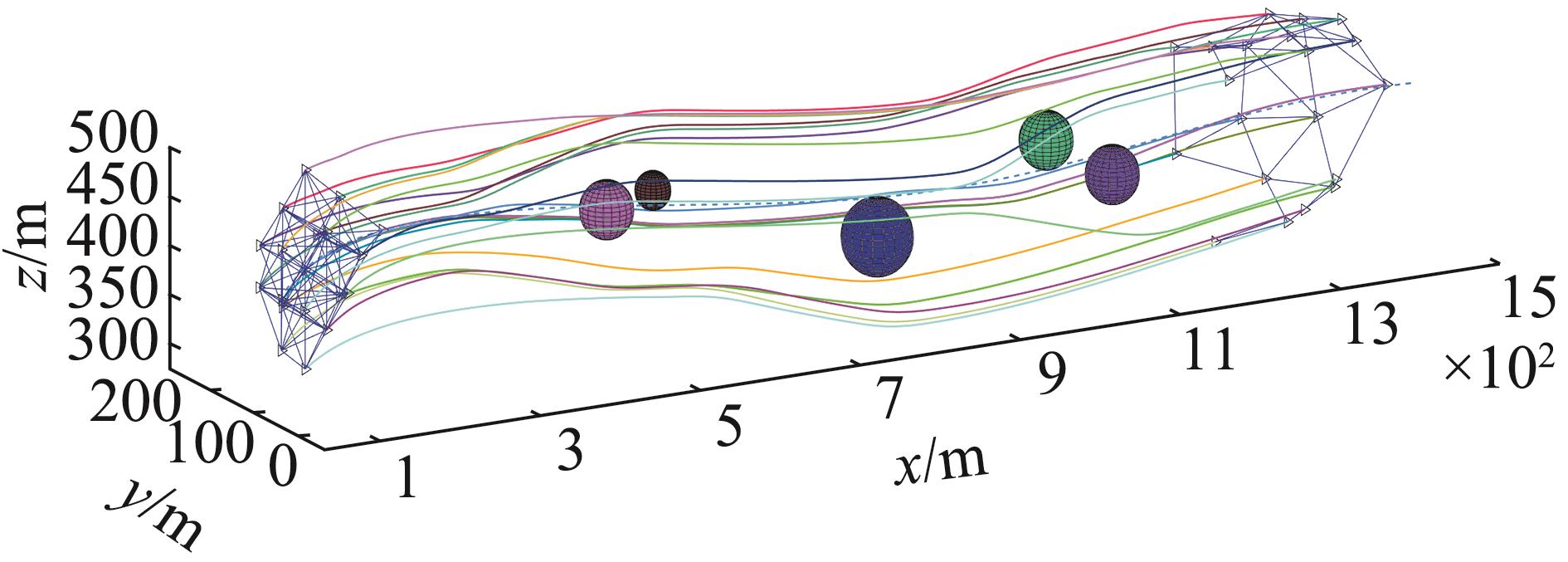

图25
复杂场景主视图
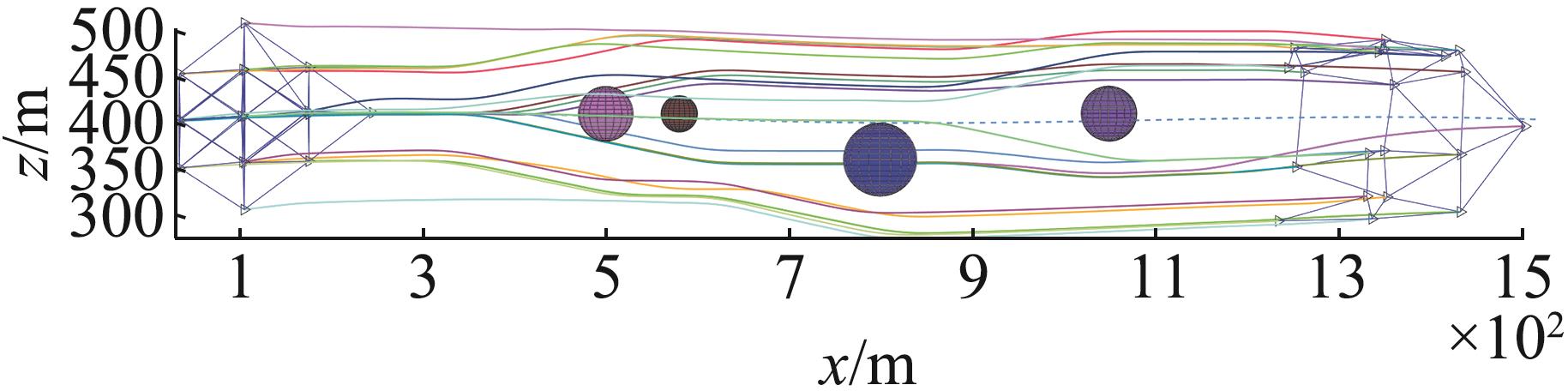

图26
复杂场景俯视图
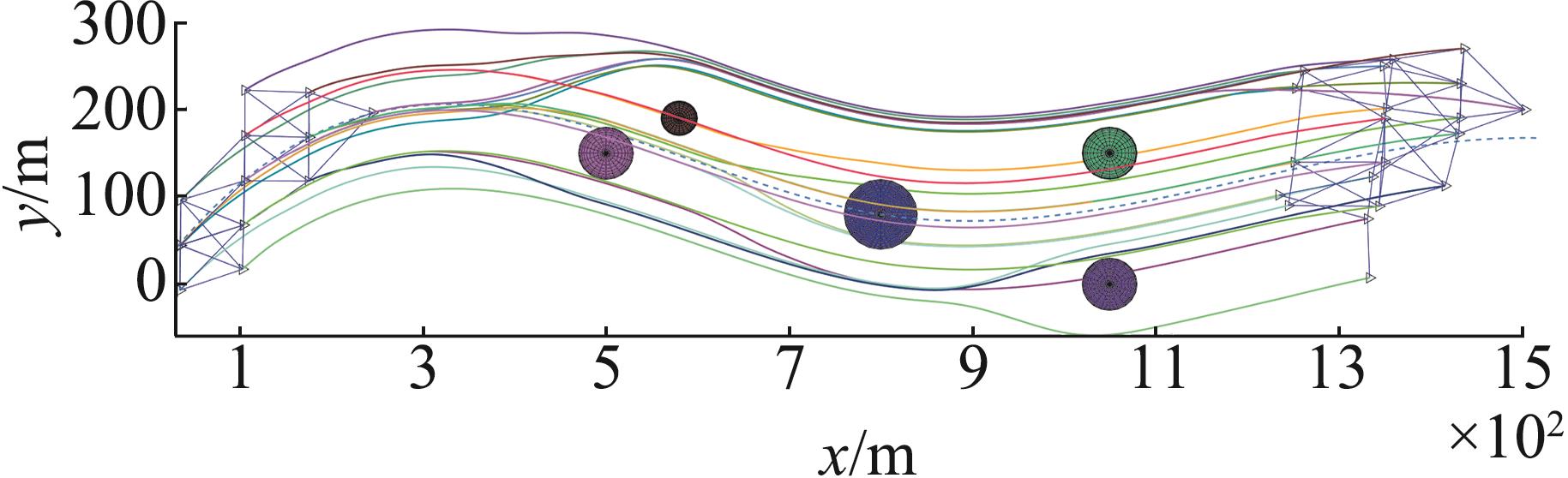
图27
复杂场景距离变化图
图28
到障碍物表面距离变化图
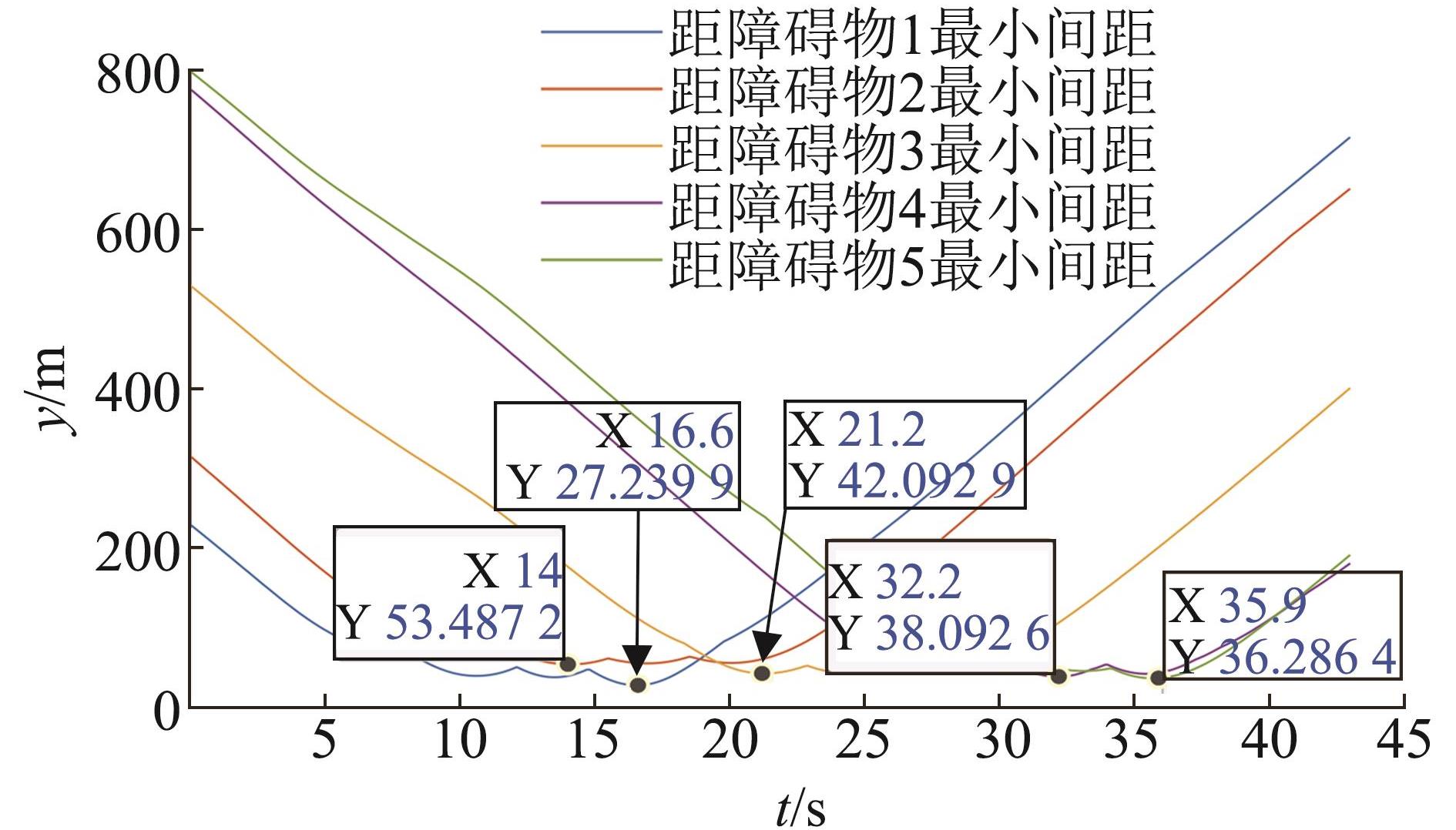
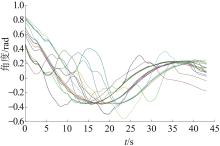
图29
UAV航迹方位角变化图
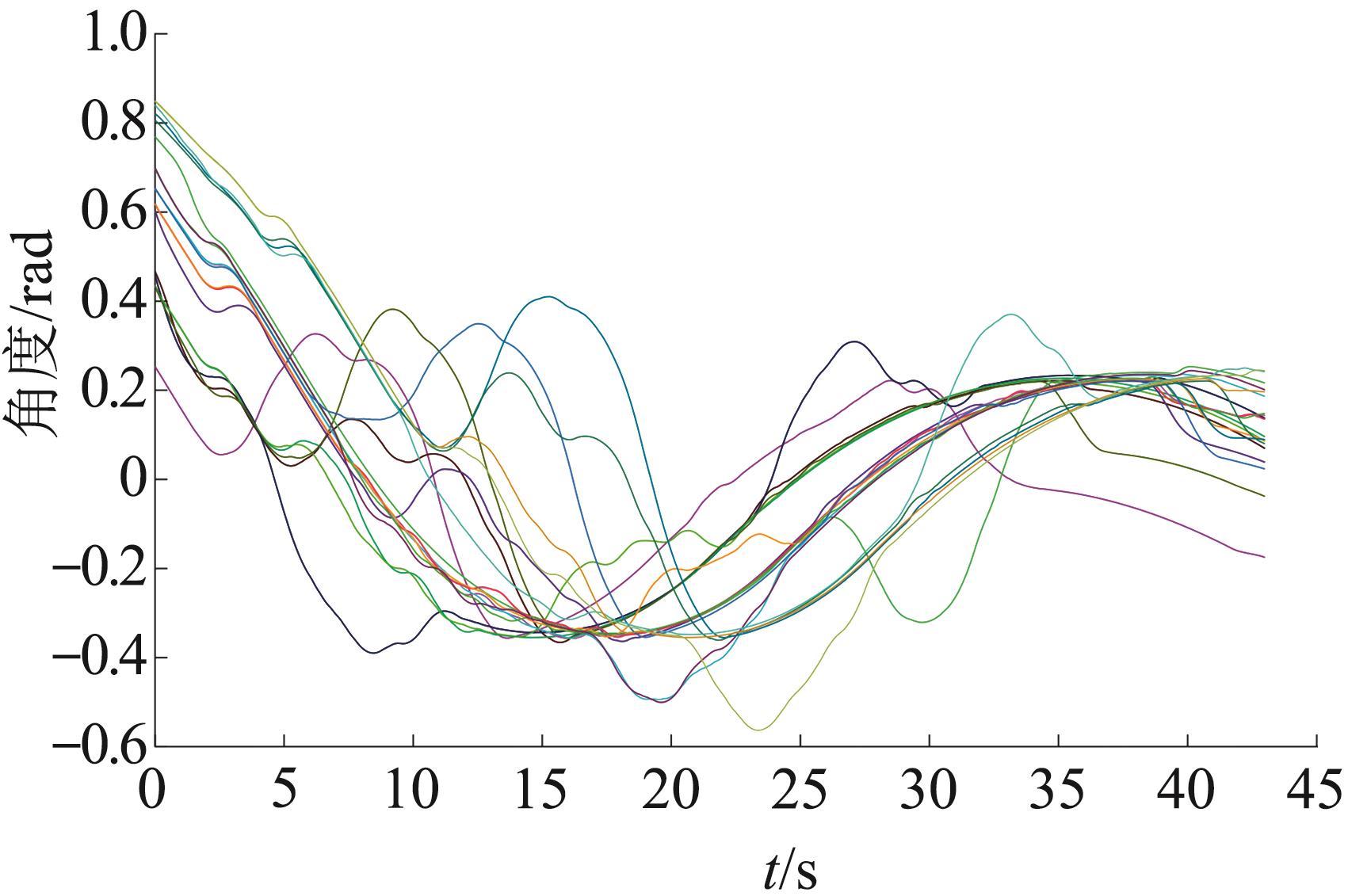
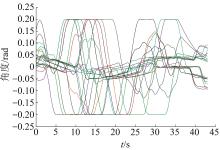
图30
UAV航迹倾斜角变化图
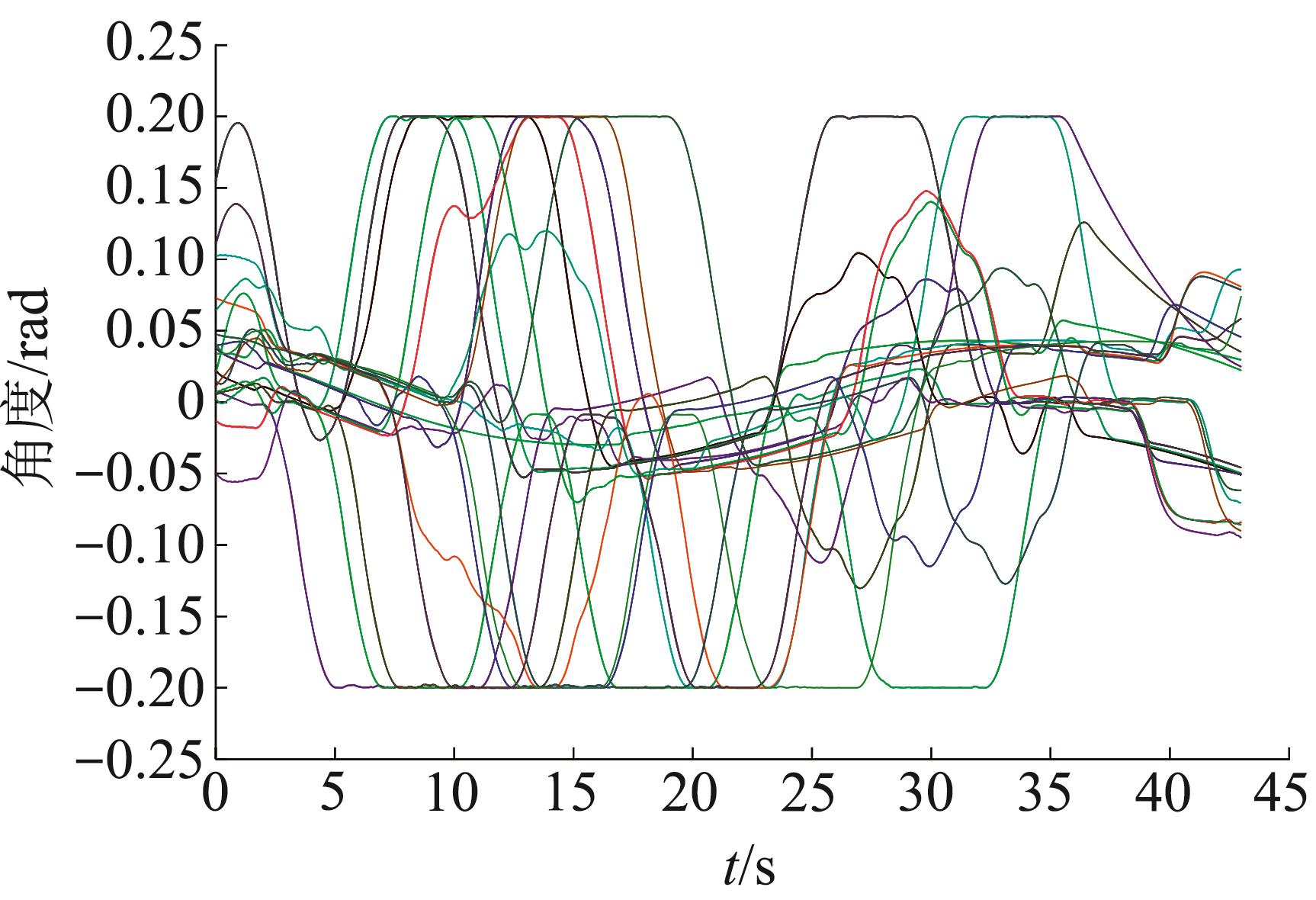
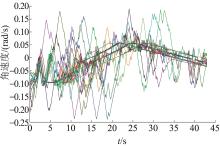
图31
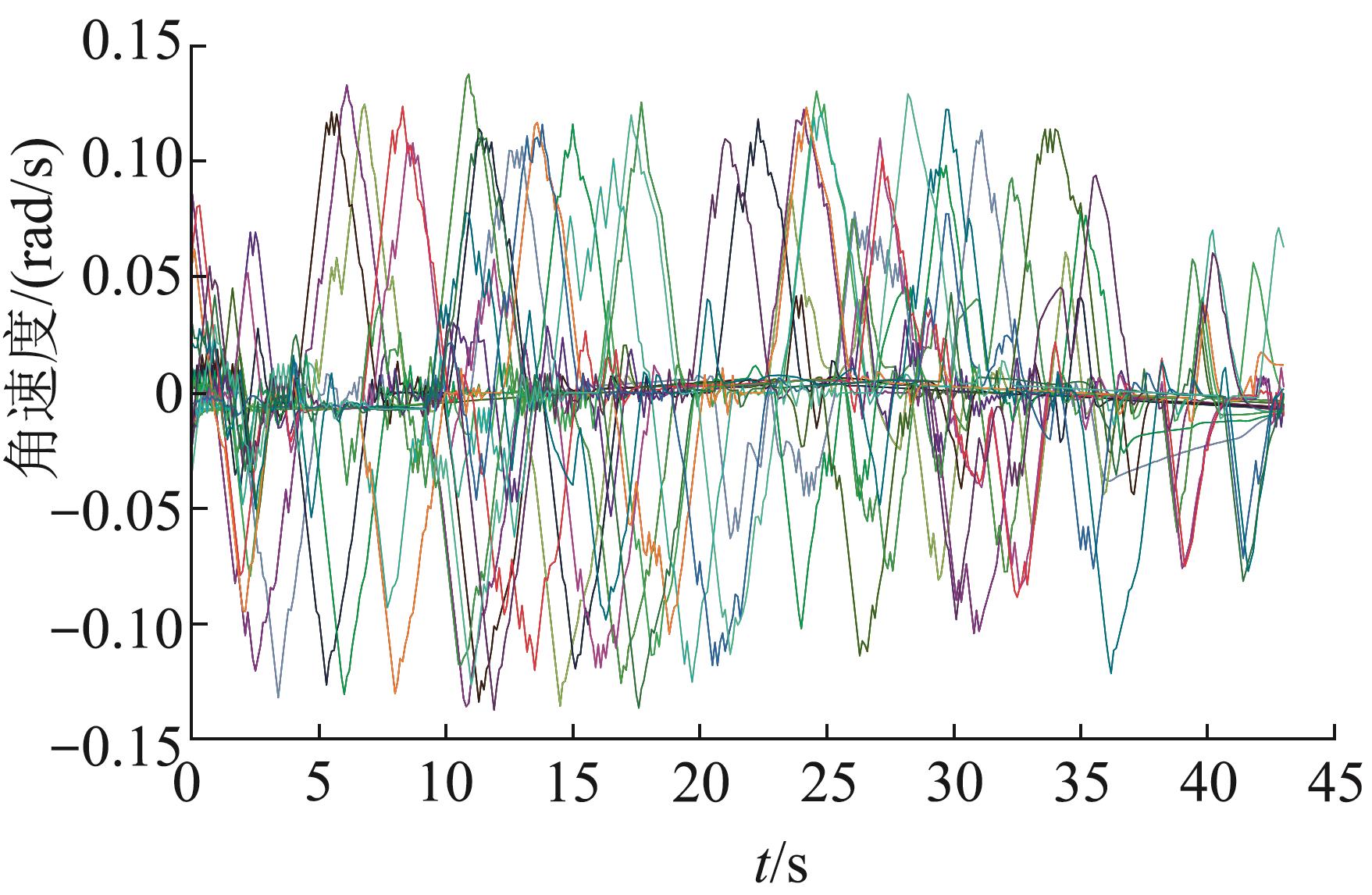
UAV航迹方位角速度变化图
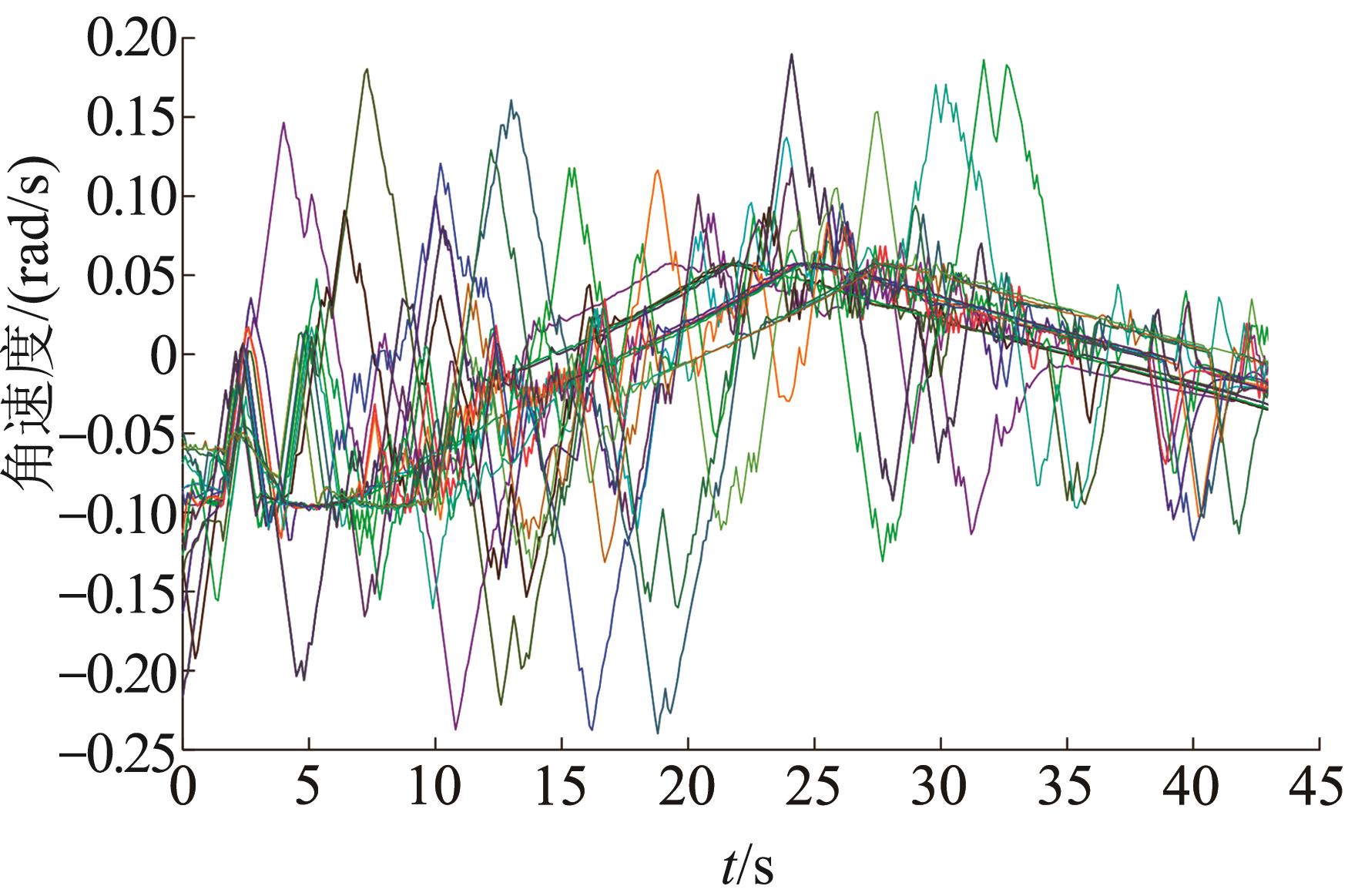
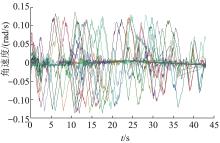
图32
UAV航迹倾斜角速度变化图
| 1 | 陆浩然, 王永峰, 鞠兴龙. 固定翼无人机编队的启发分布式模型预测控制[J]. 导航定位与授时, 2021, 8(6): 43-51. |
| Lu Haoran, Wang Yongfeng, Ju Xinglong. Fixed Wing UAVs Formation Control Based on Heuristic Distributed Model Predictive Control Method[J]. Navigation Positioning and Timing, 2021, 8(6): 43-51. | |
| 2 | Reynolds C W. Flocks, Herds and Schools: A Distributed Behavioral Model[C]//Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques. New York: Association for Computing Machinery, 1987: 25-34. |
| 3 | Olfati-Saber R. Flocking for Multi-agent Dynamic Systems: Algorithms and Theory[J]. IEEE Transactions on Automatic Control, 2006, 51(3): 401-420. |
| 4 | 伍友利, 叶圣涛, 方洋旺, 等. 固定翼无人机群的集群和避障控制[J]. 国防科技大学学报, 2019, 41(5): 103-110. |
| Wu Youli, Ye Shengtao, Fang Yangwang, et al. Flocking and Obstacles Avoidance for Fixed-wing Unmanned Aerial Vehicle Swarm[J]. Journal of National University of Defense Technology, 2019, 41(5): 103-110. | |
| 5 | Wang Xun, Wang Xiangke, Zhang Daibing, et al. A Liquid Sphere-inspired Physicomimetics Approach for Multiagent Formation Control[J]. International Journal of Robust and Nonlinear Control, 2018, 28(15): 4565-4583. |
| 6 | 桂雪琪, 李春涛. 基于视野和速度引导的无人机集群避障算法[J]. 系统仿真学报, 2024, 36(3): 545-554. |
| Gui Xueqi, Li Chuntao. UAV Swarm Obstacle Avoidance Algorithm Based on Visual Field and Velocity Guidance[J]. Journal of System Simulation, 2024, 36(3): 545-554. | |
| 7 | 陈浩. 复杂条件下固定翼无人机集群编队控制研究[D]. 长沙: 国防科技大学, 2020. |
| Chen Hao. Research on Formation Control of Fixed-wing UAV Swarm in Complex Environments[D]. Changsha: National University of Defense Technology, 2020. | |
| 8 | Richards A, How J P. Robust Distributed Model Predictive Control[J]. International Journal of Control, 2007, 80(9): 1517-1531. |
| 9 | 苏延旭. 约束系统分布式模型预测控制与优化方法研究[D]. 南京: 东南大学, 2021. |
| Su Yanxu. Distributed Model Predictive Control and Optimization for Constrained Systems[D]. Nanjing: Southeast University, 2021. | |
| 10 | Müller Matthias A, Reble Marcus, Allgöwer Frank. Cooperative Control of Dynamically Decoupled Systems Via Distributed Model Predictive Control[J]. International Journal of Robust and Nonlinear Control, 2012, 22(12): 1376-1397. |
| 11 | 秦明星, 王忠, 李海龙, 等. 基于分布式模型预测的无人机编队避障控制[J]. 北京航空航天大学学报, 2024, 50(6): 1969-1981. |
| Qin Mingxing, Wang Zhong, Li Hailong, et al. Obstacle Avoidance Control of UAV Formation Based on Distributed Model Prediction[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(6): 1969-1981. | |
| 12 | Zhang Boyang, Sun Xiuxia, Liu Shuguang, et al. Adaptive Differential Evolution-based Distributed Model Predictive Control for Multi-UAV Formation Flight[J]. International Journal of Aeronautical and Space Sciences, 2020, 21(2): 538-548. |
| 13 | Dunbar W B, Murray R M. Distributed Receding Horizon Control for Multi-vehicle Formation Stabilization[J]. Automatica, 2006, 42(4): 549-558. |
| 14 | 黄朝阳. 基于分布式预测控制的多机器人协同避障[D]. 哈尔滨: 哈尔滨工业大学, 2022. |
| Huang Chaoyang. Multi-robot Obstacle Avoidance Based on Distributed Model Predictive Control[D]. Harbin: Harbin Institute of Technology, 2022. | |
| 15 | Müller M A, Allgöwer F. Distributed MPC for Consensus and Synchronization[M]//José M Maestre, Rudy R Negenborn. Distributed Model Predictive Control Made Easy. Dordrecht: Springer Netherlands, 2014: 89-100. |
| [1] | 张艳, 李炳华, 霍涛, 刘榕. 融合改进A*算法与DWA算法的机器人动态避障方法研究[J]. 系统仿真学报, 2025, 37(6): 1555-1564. |
| [2] | 屈长虹, 王俊杰, 王坤, 崔清勇, 陈蒋洋, 王鑫鹏. 基于联合DQN的定向能系统火力智能决策建模仿真方法[J]. 系统仿真学报, 2025, 37(5): 1256-1265. |
| [3] | 王贺, 许佳宁, 闫广宇. 基于深度强化学习的AGV行人避让策略研究[J]. 系统仿真学报, 2025, 37(3): 595-606. |
| [4] | 霍韩淋, 邹湘军, 陈燕, 周馨曌, 陈明猷, 李承恩, 潘耀强, 唐昀超. 基于视觉机器人障碍点云映射避障规划及仿真[J]. 系统仿真学报, 2024, 36(9): 2149-2158. |
| [5] | 姬鹏, 张新元, 高帅轩, 魏铄让. 融合改进A*算法与动态窗口法的路径规划研究[J]. 系统仿真学报, 2024, 36(9): 2171-2180. |
| [6] | 刘斌, 兰莹, 黄文焘, 范勤勤. 融合动态窗口法的无人机动态路径规划算法[J]. 系统仿真学报, 2024, 36(8): 1843-1853. |
| [7] | 刘泽森, 毕盛, 郭传鈜, 王延葵, 董敏. 基于深度学习的机器人局部路径规划方法[J]. 系统仿真学报, 2024, 36(5): 1199-1210. |
| [8] | 张瑞, 周丽, 刘正洋. 融合RRT*与DWA算法的移动机器人动态路径规划[J]. 系统仿真学报, 2024, 36(4): 957-968. |
| [9] | 桂雪琪, 李春涛. 基于视野和速度引导的无人机集群避障算法[J]. 系统仿真学报, 2024, 36(3): 545-554. |
| [10] | 刘福琳, 李庆鑫. 多移动机器人混合避障算法的编队策略[J]. 系统仿真学报, 2024, 36(3): 726-734. |
| [11] | 石成泷, 华翔, 王东, 张金金, 蒋天启, 党元章. 考虑局部特征的无人机集群关键节点识别方法[J]. 系统仿真学报, 2024, 36(12): 2824-2833. |
| [12] | 马宗方, 张琳旋, 宋琳, 王嘉. 基于改进动态窗口的车库AGV路径规划及仿真[J]. 系统仿真学报, 2024, 36(10): 2265-2276. |
| [13] | 唐昀超, 祁少军, 朱立学, 卓献荣, 张芸齐, 孟繁. 移动机器人避障运动研究[J]. 系统仿真学报, 2024, 36(1): 1-26. |
| [14] | 彭建伟, 廖哲霖, 姚瀚晨, 万郅玙, 朱利琦, 戴厚德. 基于拓展社会力的机器人柔顺跟随与避障控制[J]. 系统仿真学报, 2023, 35(8): 1776-1787. |
| [15] | 林俊强, 王红军, 邹湘军, 张坡, 李承恩, 周益鹏, 姚书杰. 基于DPPO的移动采摘机器人避障路径规划及仿真[J]. 系统仿真学报, 2023, 35(8): 1692-1704. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
