

系统仿真学报 ›› 2023, Vol. 35 ›› Issue (8): 1692-1704.doi: 10.16182/j.issn1004731x.joss.22-0487
林俊强1( ), 王红军1(), 邹湘军1,2, 张坡1, 李承恩1, 周益鹏3, 姚书杰1
), 王红军1(), 邹湘军1,2, 张坡1, 李承恩1, 周益鹏3, 姚书杰1
收稿日期:2022-05-12
修回日期:2022-07-11
出版日期:2023-08-25
发布日期:2023-08-15
第一作者简介:林俊强(1996-),男,硕士,研究方向为深度强化学习与行为仿真。E-mail:junqiang_lin@163.com
基金资助:
Junqiang Lin1(), Hongjun Wang1(), Xiangjun Zou1,2, Po Zhang1, Chengen Li1, Yipeng Zhou3, Shujie Yao1
Received:2022-05-12
Revised:2022-07-11
Online:2023-08-25
Published:2023-08-15
林俊强,王红军,邹湘军等 . 基于DPPO的移动采摘机器人避障路径规划及仿真[J]. 系统仿真学报, 2023, 35(8): 1692-1704.
Junqiang Lin,Hongjun Wang,Xiangjun Zou,et al . Obstacle Avoidance Path Planning and Simulation of Mobile Picking Robot Based on DPPO[J]. Journal of System Simulation, 2023, 35(8): 1692-1704.

图1
系统整体架构
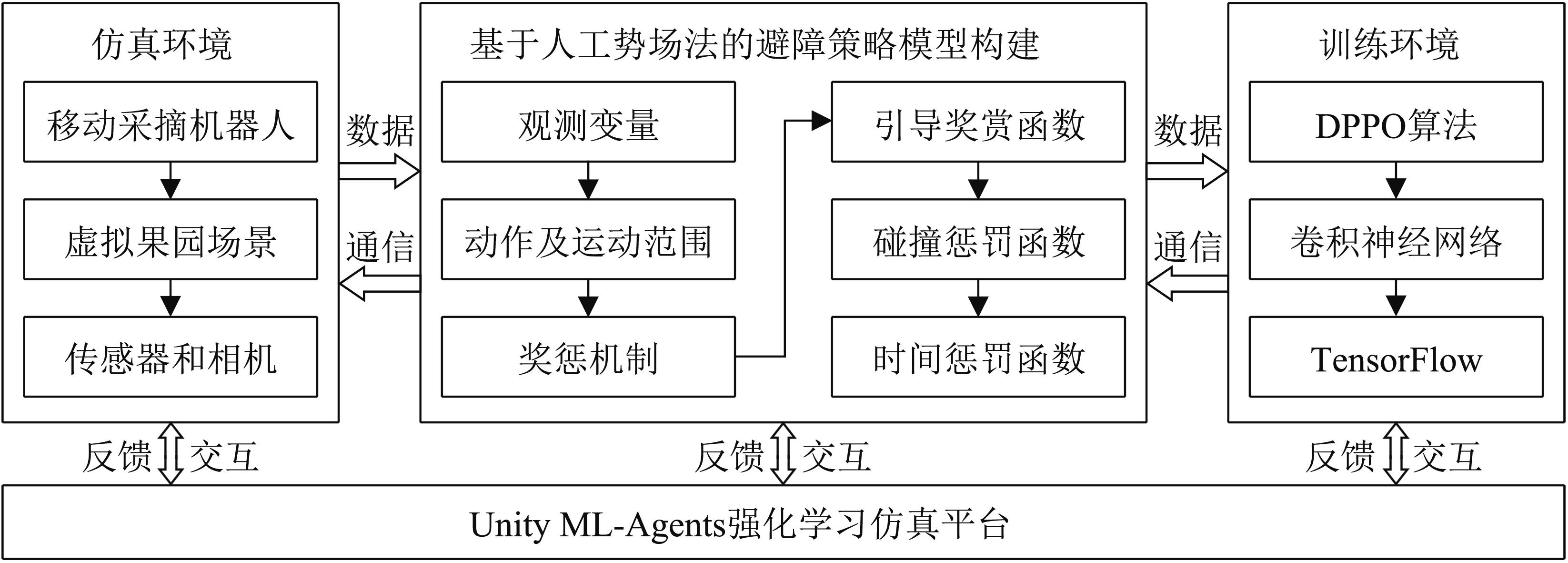
表1
状态空间集合列表
| 观测变量 | 符号 | 状态描述 |
|---|---|---|
| 位置变量 | 机器人空间位置 | |
| 障碍物空间位置 | ||
| 果树空间位置 | ||
| 机器人变量 | 线速度 | |
| 角速度 | ||
| 移动时间 | ||
| 距离变量 | 机器人与障碍物的距离 | |
| 机器人与目标点的距离 |
表2
动作空间集合列表
| 控制方式 | 符号 | 动作描述 | 取值范围 |
|---|---|---|---|
| 前进控制 | 加速 静止 | [0, 1] | |
| 转向控制 | 左转 直行 右转 | [ 1, 1] |
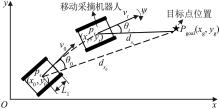
图2
移动采摘机器人运动模型
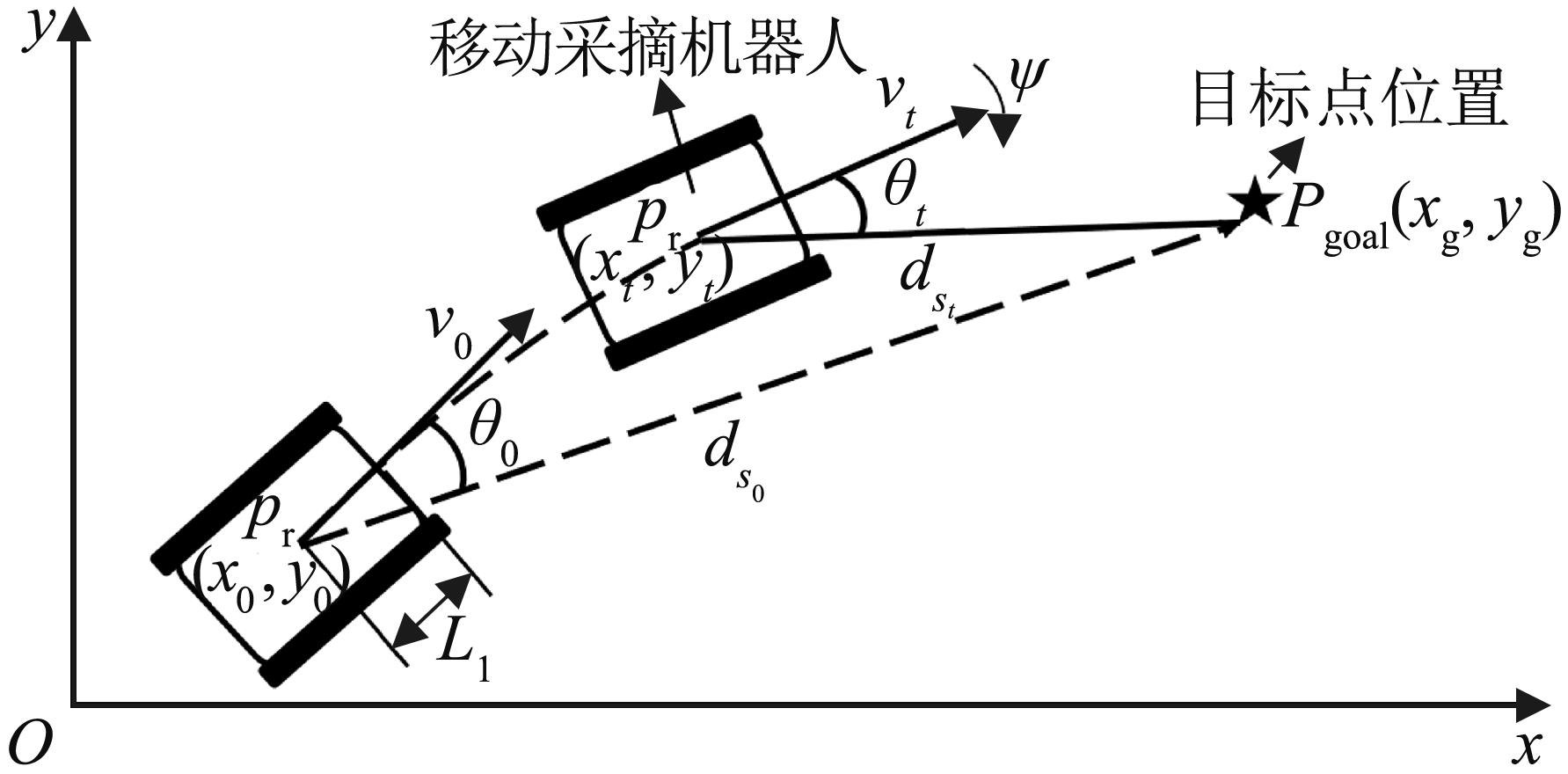
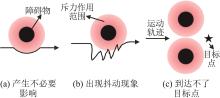
图3
人工势场法局限
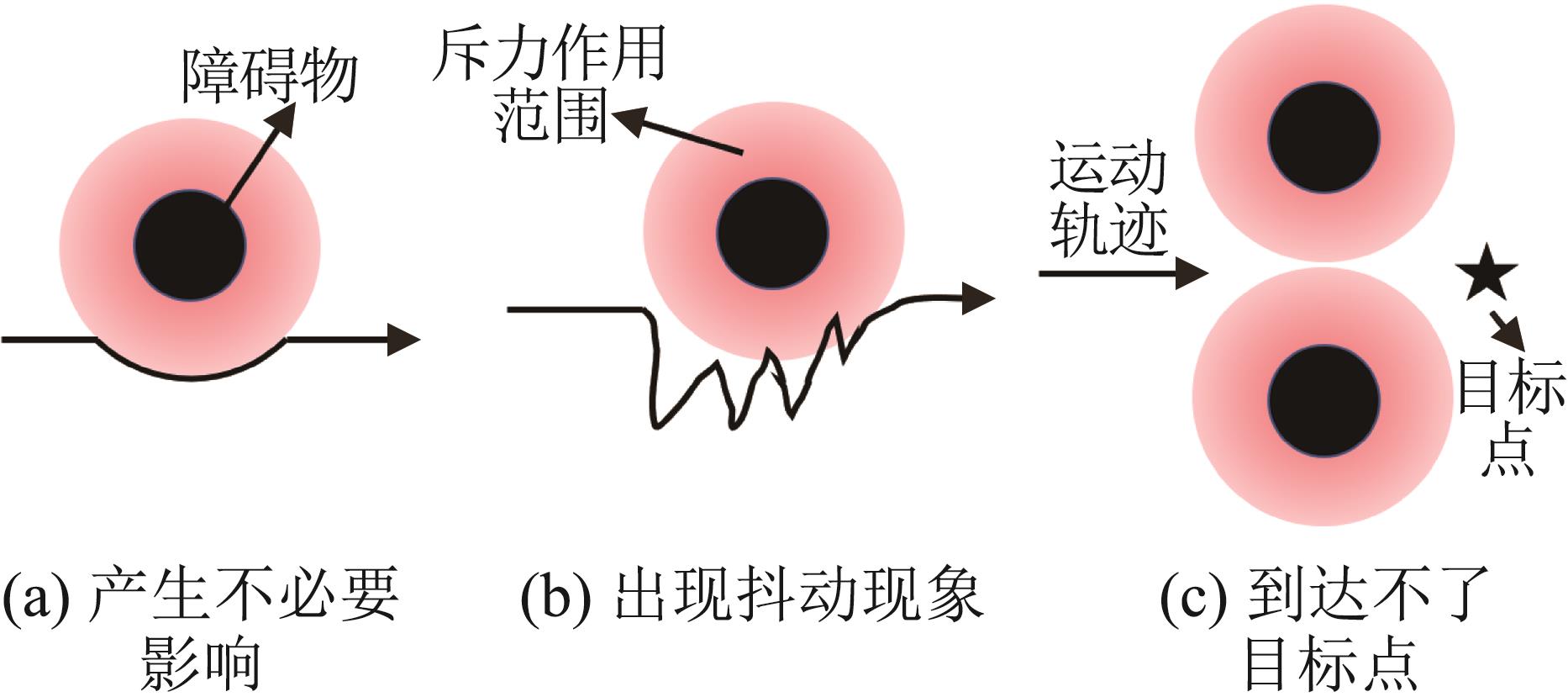

图4
移动采摘机器人运动碰撞检测
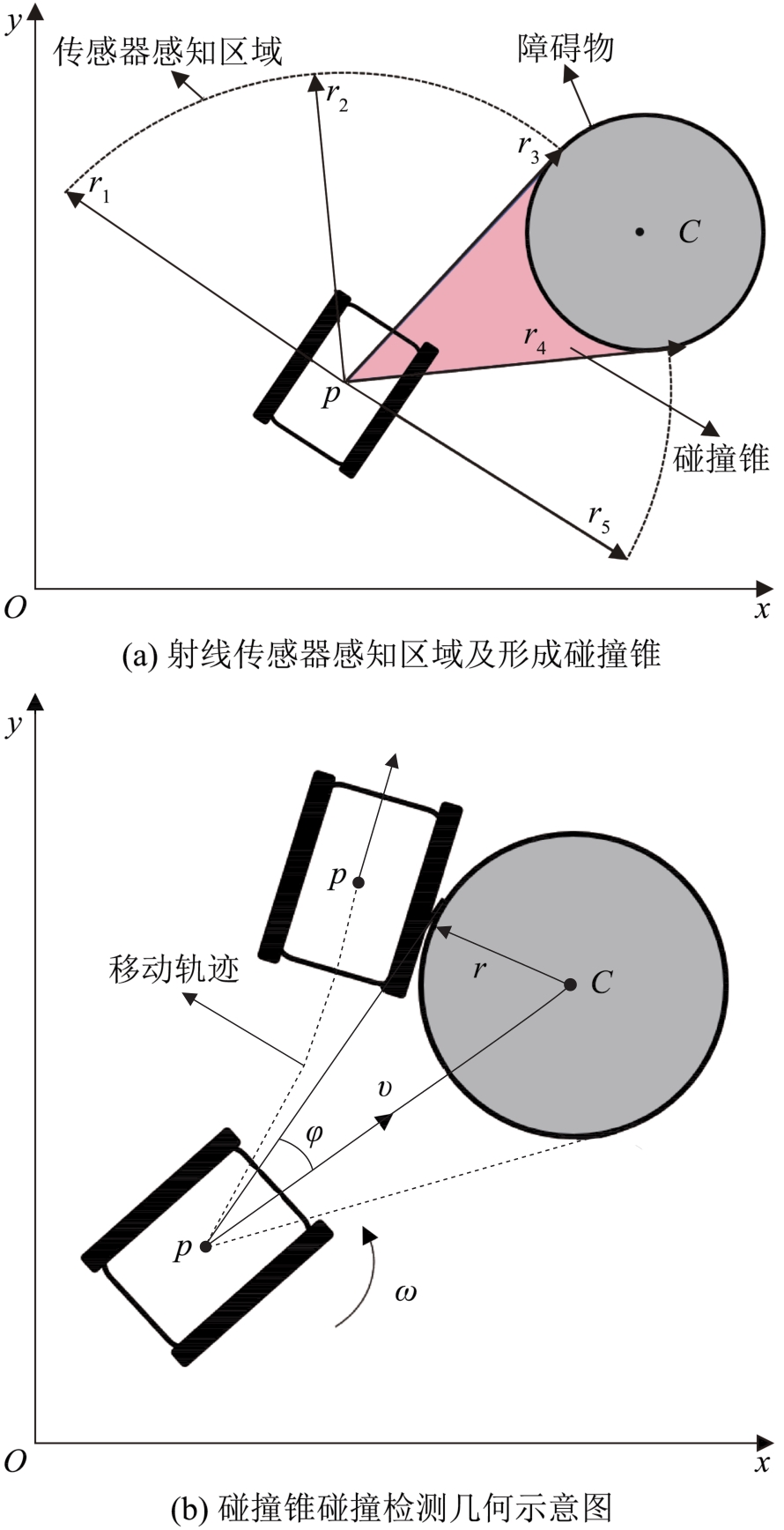

图5
DPPO算法网络训练流程
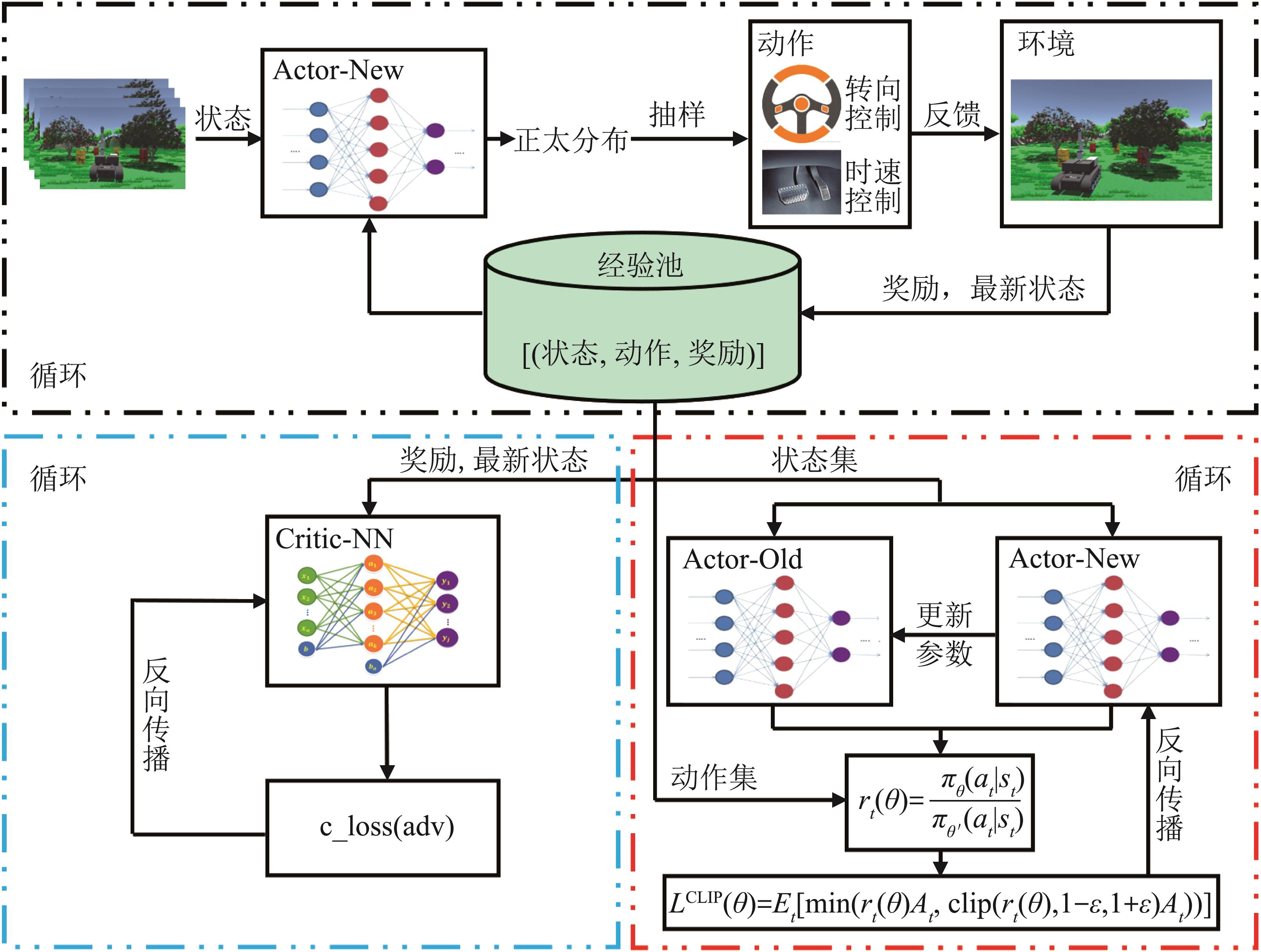
表3
训练参数设置
| 参数名称 | 参数值设置 |
|---|---|
| batch size buffer_size learning_rate beta β epsilon ε lambda λ gamma γ num_epoch num_layers hidden_units max_steps | 2 048 10 240 3×10-4 5×10-3 0.2 0.95 0.99 3 2 256 5×105 |
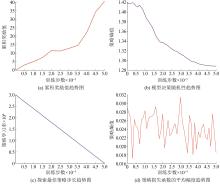
图6
深度强化学习训练结果
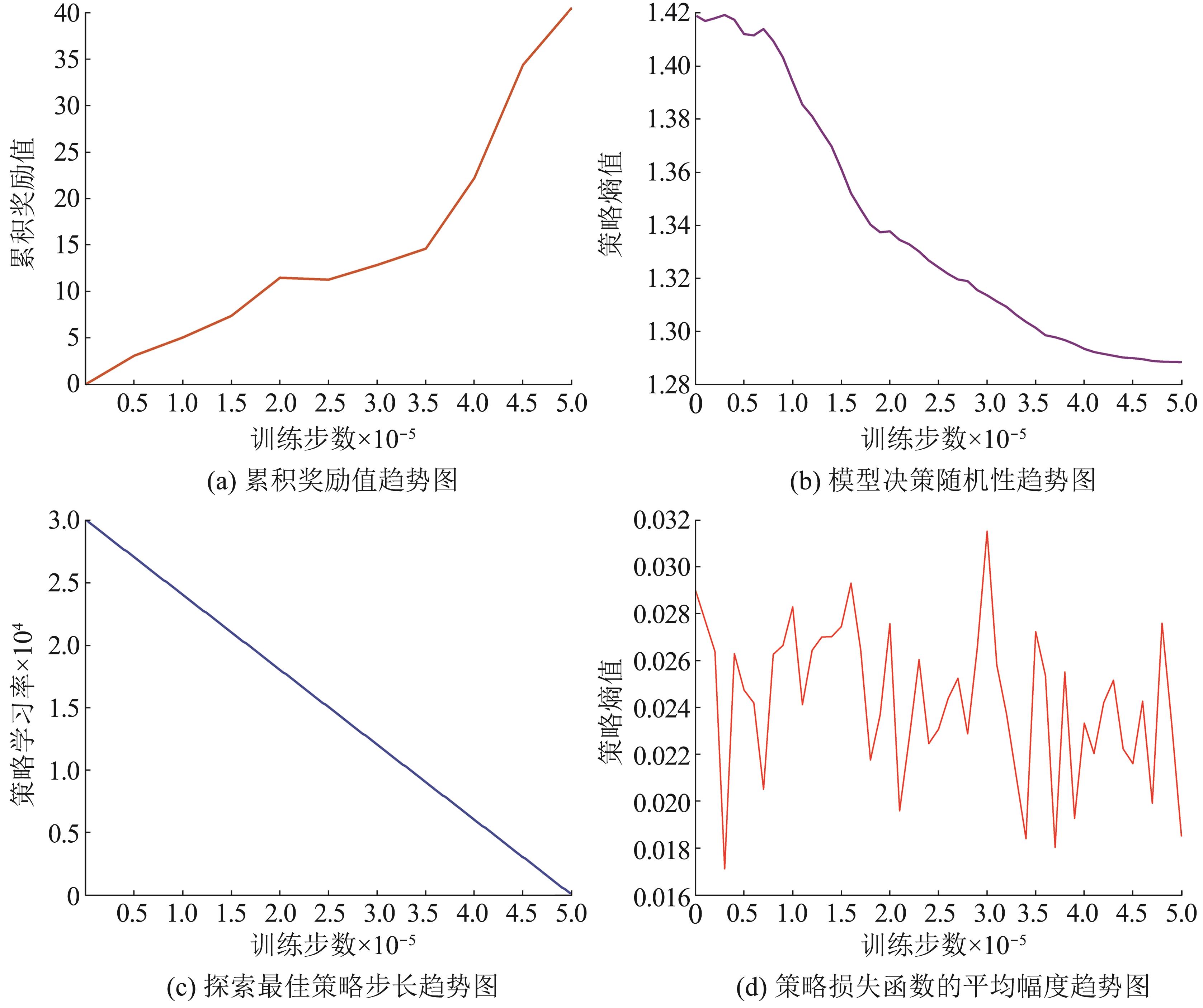

图7
不同类型障碍物的仿真环境
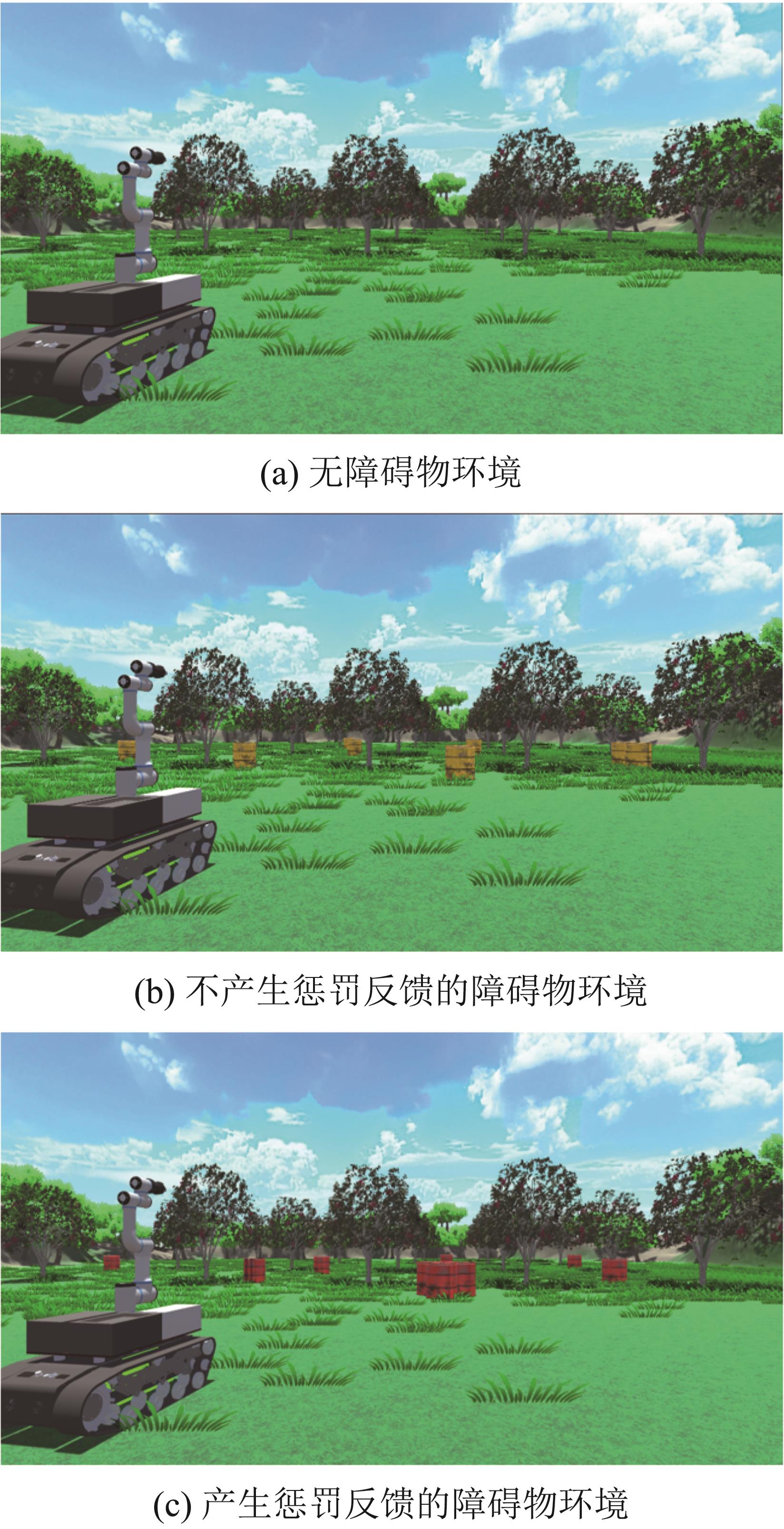
表4
不同类型障碍物影响移动避障成功率实验
| 障碍物 类型 | 成功数 (实验数) | 平均 时间/s | 最大 转向角/(°) | 成功率/% |
|---|---|---|---|---|
| 无障碍物 | 85(90) | 10.13 | 41.15 | 94.4 |
| 无惩罚反馈 | 83(90) | 11.57 | 56.23 | 92.2 |
| 有惩罚反馈 | 86(90) | 9.54 | 32.82 | 95.6 |
图8
不同奖惩机制的累积奖励值趋势图
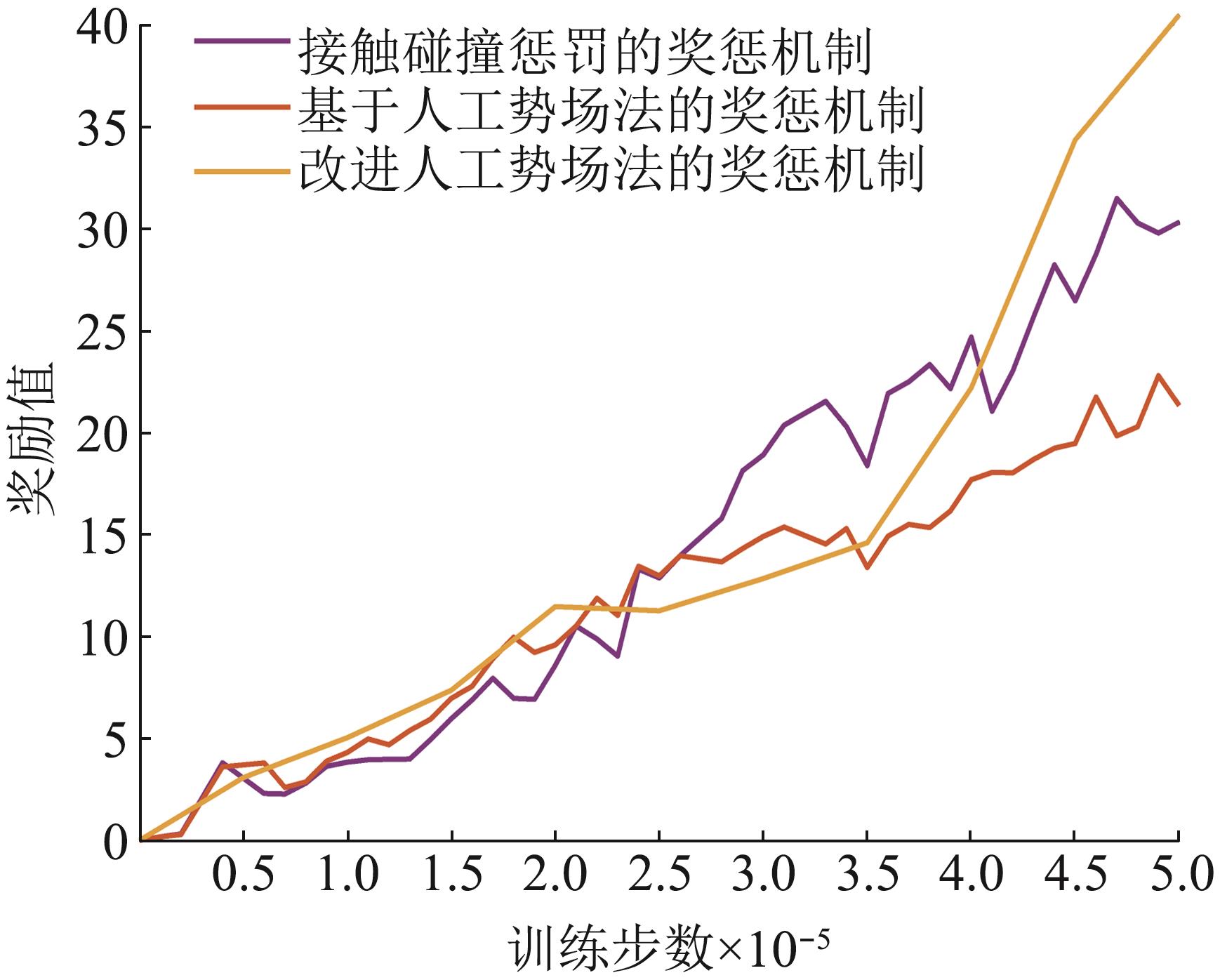
表5
不同奖惩机制影响移动采摘机器人避障性能实验
| 奖惩机制类型 | 实验数 | 成功数 | 移动采摘机器人每次完成任务所使用时间/s | 成功率/% | |||
|---|---|---|---|---|---|---|---|
| 最小值 | 平均值 | 最大值 | 标准差 | ||||
| 接触碰撞惩罚 | 120 | 104 | 9.41 | 9.66 | 10.17 | 0.41 | 86.7 |
| 基于人工势场法 | 120 | 111 | 10.03 | 10.48 | 11.23 | 0.67 | 92.5 |
| 改进人工势场法 | 120 | 117 | 8.96 | 9.15 | 9.47 | 0.25 | 97.5 |
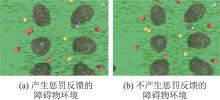
图9
不同类型障碍物下自主避障路径规划结果
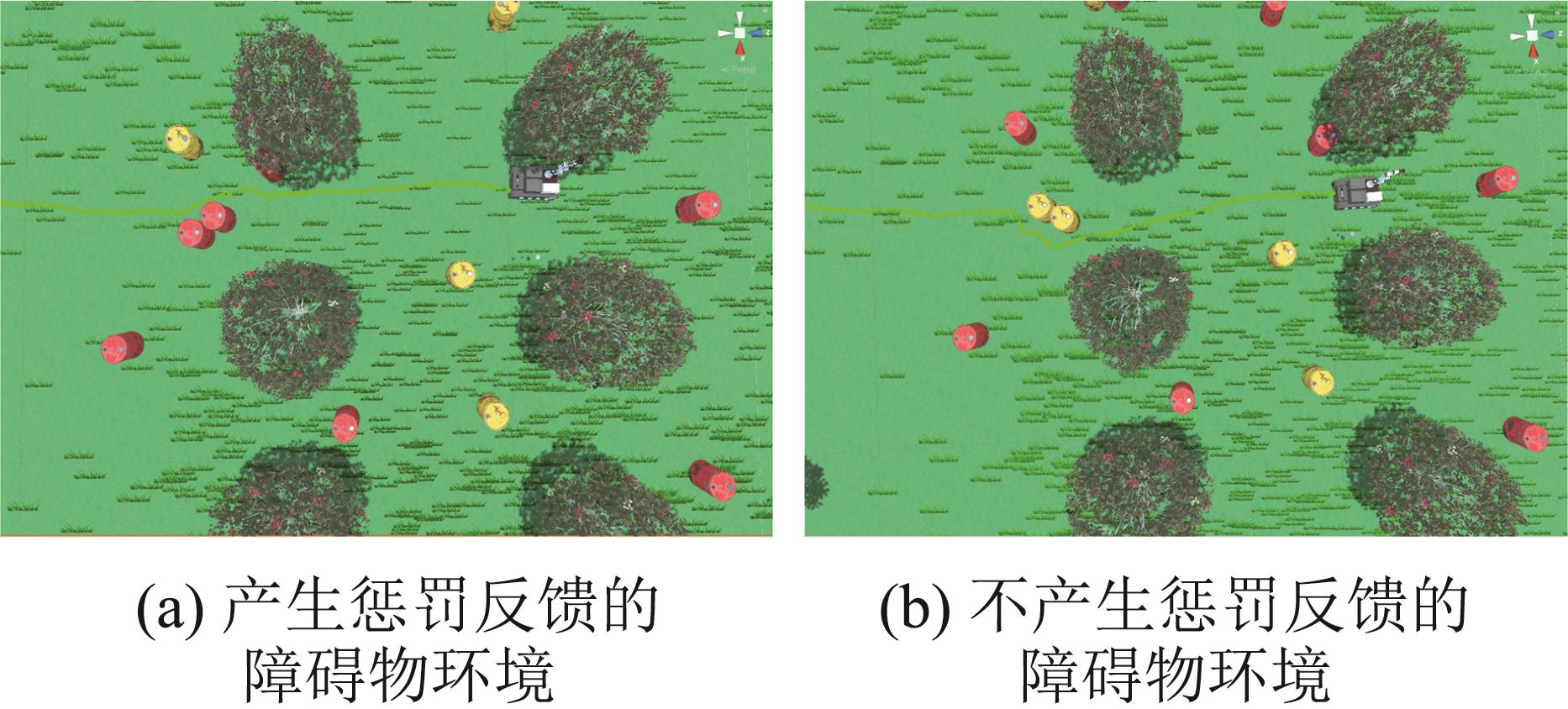
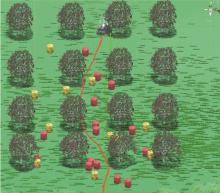
图10
不同奖惩机制下自主避障路径规划结果
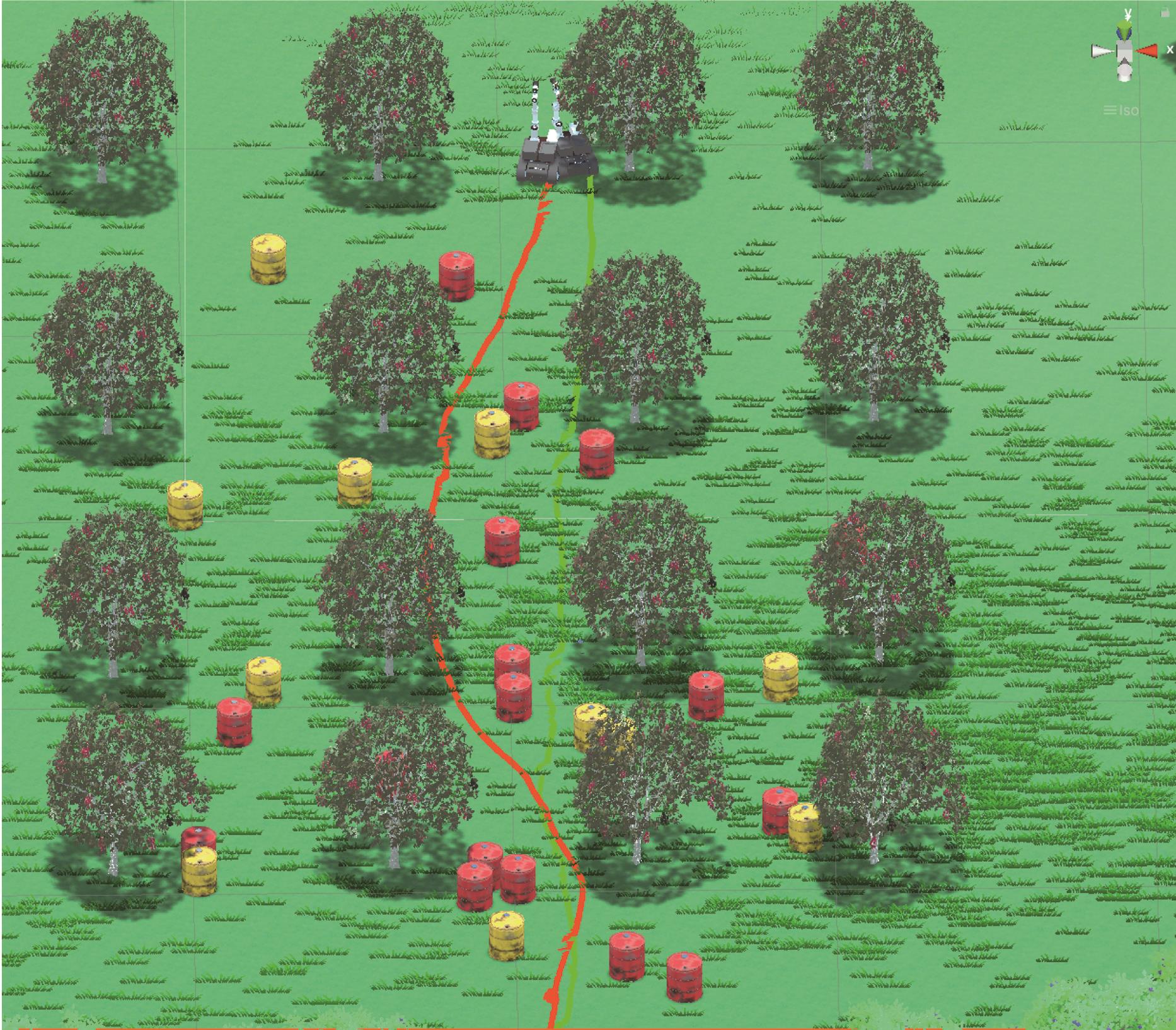

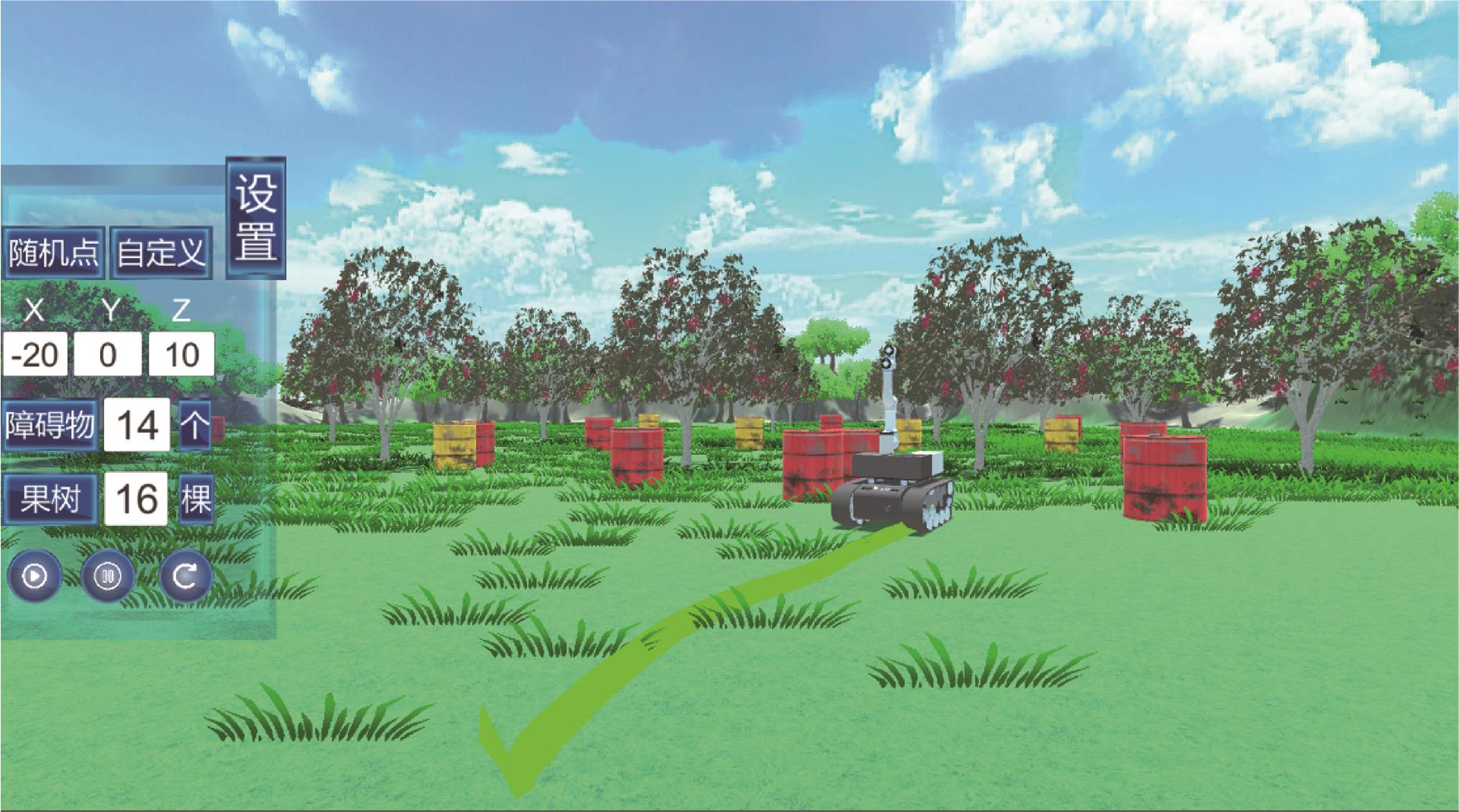
图11
采摘机器人移动避障作业效果图
| 1 |
胡广锐, 孔微雨, 齐闯, 等. 果园环境下移动采摘机器人导航路径优化[J]. 农业工程学报, 2021, 37(9): 175-184.
|
|
|
|
| 2 |
闫皎洁, 张锲石, 胡希平. 基于强化学习的路径规划技术综述[J]. 计算机工程, 2021, 47(10): 16-25.
|
|
|
|
| 3 |
|
| 4 |
|
| 5 |
陈志梅, 李敏, 邵雪卷, 等. 基于改进RRT算法的桥式起重机避障路径规划[J]. 系统仿真学报, 2021, 33(8): 1832-1838.
|
|
|
|
| 6 |
|
| 7 |
|
| 8 |
邓向阳, 张立民, 方伟, 等. 基于双向汇聚引导蚁群算法的机器人路径规划[J]. 系统仿真学报, 2022, 34(5): 1101-1108.
|
|
|
|
| 9 |
张文, 刘勇, 张超凡, 等. 基于方向A*算法的温室机器人实时路径规划[J]. 农业机械学报, 2017, 48(7): 22-28.
|
|
|
|
| 10 |
李腾, 丁佩佩, 刘金芳. 货到人拣选系统多阶段可穿行多AGV路径规划[J]. 系统仿真学报, 2022, 34(7): 1512-1523.
|
|
|
|
| 11 |
殷建军, 董文龙, 梁利华, 等. 复杂环境下农业机器人路径规划优化方法[J]. 农业机械学报, 2019, 50(5): 17-22.
|
|
|
|
| 12 |
魏武, 韩进, 李艳杰, 等. 基于双树Quick-RRT*算法的移动机器人路径规划[J]. 华南理工大学学报(自然科学版), 2021, 49(7): 51-58.
|
|
|
|
| 13 |
孙辉辉, 胡春鹤, 张军国. 移动机器人运动规划中的深度强化学习方法[J]. 控制与决策, 2021, 36(6): 1281-1292.
|
|
|
|
| 14 |
张荣霞, 武长旭, 孙同超, 等. 深度强化学习及在路径规划中的研究进展[J]. 计算机工程与应用, 2021, 57(19): 44-56.
|
|
|
|
| 15 |
刘全, 翟建伟, 章宗长, 等. 深度强化学习综述[J]. 计算机学报, 2018, 41(1): 1-27.
|
|
|
|
| 16 |
|
| 17 |
徐晓苏, 袁杰. 基于改进强化学习的移动机器人路径规划方法[J]. 中国惯性技术学报, 2019, 27(3): 314-320.
|
|
|
|
| 18 |
王珂, 卜祥津, 李瑞峰, 等. 景深约束下的深度强化学习机器人路径规划[J]. 华中科技大学学报(自然科学版), 2018, 46(12): 77-82.
|
|
|
|
| 19 |
成怡, 郝密密. 改进深度强化学习的室内移动机器人路径规划[J]. 计算机工程与应用, 2021, 57(21): 256-262.
|
|
|
|
| 20 |
|
| 21 |
邹湘军, 罗锡文, 卢俊, 等. 虚拟环境下农业移动机器人行为及其仿真建模[J]. 系统仿真学报, 2006, 18(增2): 551-553, 562.
|
|
|
|
| 22 |
|
| 23 |
|
| 24 |
熊俊涛, 李中行, 陈淑绵, 等. 基于深度强化学习的虚拟机器人采摘路径避障规划[J]. 农业机械学报, 2020, 51(增2): 1-10.
|
|
|
|
| 25 |
熊超, 解武杰, 董文瀚. 基于碰撞锥改进人工势场的无人机避障路径规划[J]. 计算机工程, 2018, 44(9): 314-320.
|
|
|
| [1] | 梁隆硝, 毛剑琳, 王妮娅, 房程远, 周雯娜. 最小规划裕量优先的多机器人CBS路径规划算法[J]. 系统仿真学报, 2026, 38(5): 1159-1173. |
| [2] | 孟文龙, 濮彦博, 龚亚. 未知环境下融合局部-全局策略的AUV路径规划[J]. 系统仿真学报, 2026, 38(4): 889-902. |
| [3] | 李德权, 熊婉. 基于SAC3Q-HDM的强化学习机器人路径规划[J]. 系统仿真学报, 2026, 38(3): 714-724. |
| [4] | 谢俊, 张琦, 彭延云, 石浩楠, 李东阳, 刘熙. 基于无碰撞轨迹的无人机路径规划方法研究[J]. 系统仿真学报, 2026, 38(3): 808-817. |
| [5] | 吴舒霞, 张俊杰, 陈德珑, 陈哲毅. 面向边缘实时视频分析的资源高效持续学习框架[J]. 系统仿真学报, 2026, 38(2): 294-306. |
| [6] | 朱玲, 李靖, 张朝辉. 基于改进REA*算法的机器人自适应路径规划[J]. 系统仿真学报, 2026, 38(2): 332-345. |
| [7] | 王秉坤, 王越, 杨妹, 张鹏年, 樊浡昊, 唐杰. 基于改进近端策略优化算法的无人车打击策略规划方法[J]. 系统仿真学报, 2026, 38(2): 372-386. |
| [8] | 郑巍, 汤佳豪, 熊小平, 樊鑫. 基于非对称自博弈的非均势空战智能决策方法[J]. 系统仿真学报, 2026, 38(2): 433-446. |
| [9] | 丁拯坤, 刘佳奇, 徐军政, 徐悦竹, 王兴梅. 基于BiGRU与优先级动态采样的智能空战决策方法[J]. 系统仿真学报, 2026, 38(2): 447-459. |
| [10] | 陶彩霞, 陈乃焜, 高锋阳, 张建刚. 基于多智能体强化学习的综合能源分布式优化[J]. 系统仿真学报, 2026, 38(2): 476-487. |
| [11] | 江明, 何韬. 基于深度强化学习的带容量约束车辆路径问题求解[J]. 系统仿真学报, 2025, 37(9): 2177-2187. |
| [12] | 于逸然, 赖惠成, 高古学, 张过, 彭汪忆楠, 杨龙飞, 黄俊豪. 基于遗传算法和A*算法的多农机协同作业优化方法[J]. 系统仿真学报, 2025, 37(9): 2397-2408. |
| [13] | 倪培龙, 毛鹏军, 王宁, 杨孟杰. 基于改进A-DDQN算法的机器人路径规划[J]. 系统仿真学报, 2025, 37(9): 2420-2430. |
| [14] | 张凯翔, 毛剑琳, 王妮娅, 徐志昊. 针对路径干扰的多机器人分层协作k鲁棒路径规划[J]. 系统仿真学报, 2025, 37(8): 2074-2088. |
| [15] | 陈真, 吴卓屹, 张霖. 深度强化学习中策略表征研究简述[J]. 系统仿真学报, 2025, 37(7): 1753-1769. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
