

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (11): 2701-2713.doi: 10.16182/j.issn1004731x.joss.24-0564
• Papers • Next Articles
Liu Jia1,2,3, Zhang Zengwei1,2, Chen Dapeng1,2,3, Huang Nanxuan1,2, Wang Bin1,2, Song Hong1,2
Received:2024-05-24
Revised:2024-07-20
Online:2025-11-18
Published:2025-11-27
Contact:
Chen Dapeng
CLC Number:
Liu Jia, Zhang Zengwei, Chen Dapeng, Huang Nanxuan, Wang Bin, Song Hong. Improvement of SLAM Localization Accuracy in AR by Enhancing YOLOv8[J]. Journal of System Simulation, 2025, 37(11): 2701-2713.

Fig. 1
All feature points within detection box are removed


Fig. 2
YOLOv8 incorporates CBAM attention mechanism
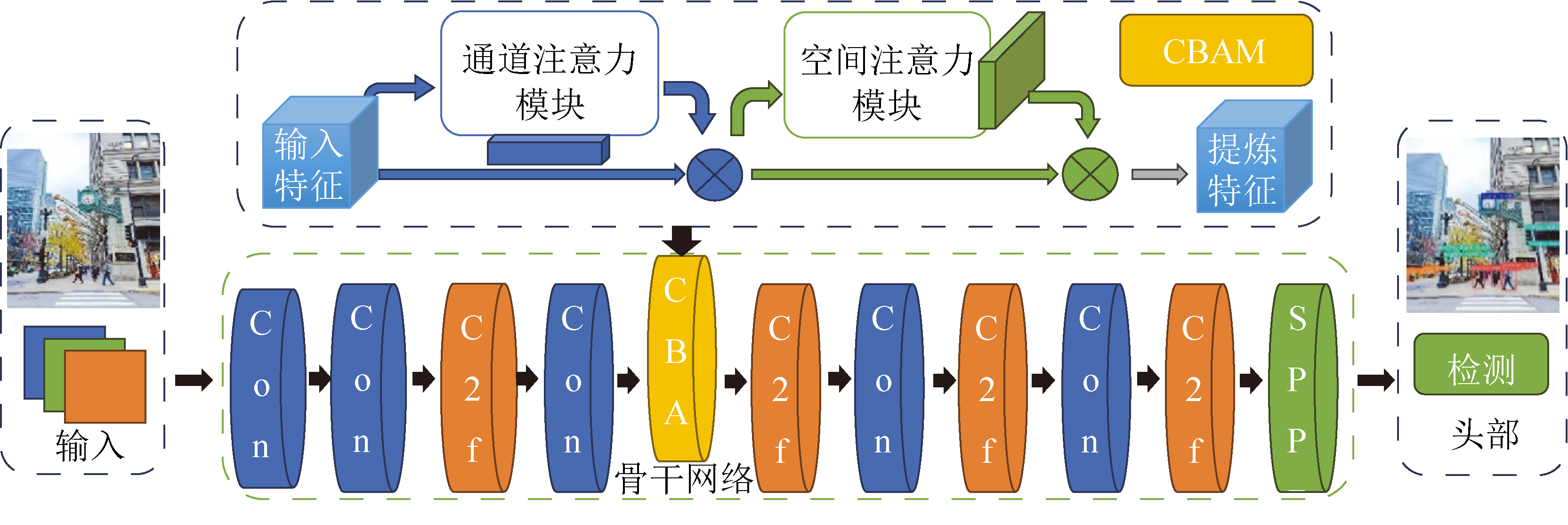

Fig. 3
mAP result comparison
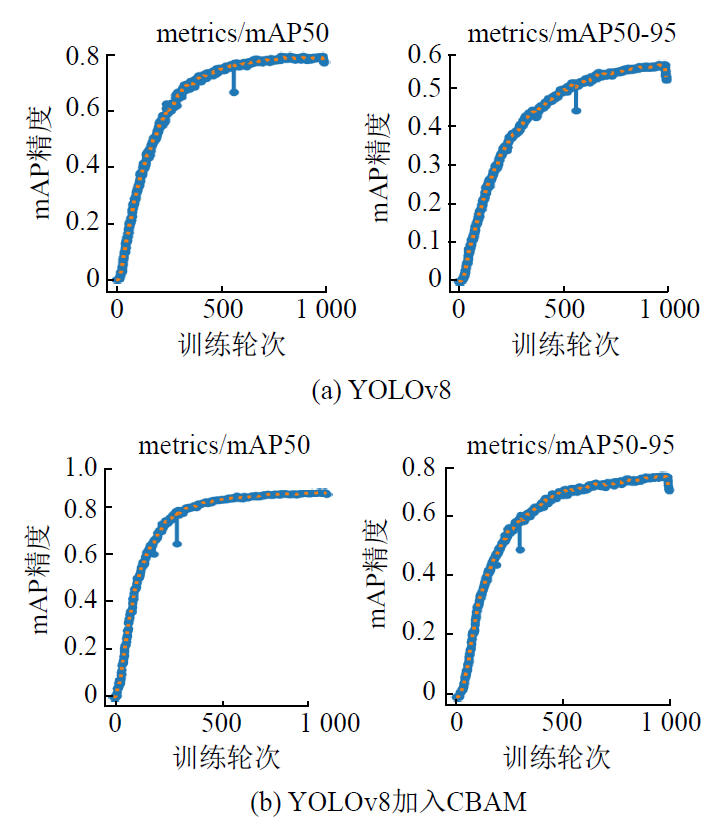
Table 1
Comparison of accuracy with CBAM incorporation
| 模型 | 人 | 汽车 | 狗 | 杯子 | 飞盘 |
|---|---|---|---|---|---|
| YOLOv8 | 0.810 | 0.718 | 0.911 | 0.735 | 0.640 |
| YOLOv8+GAM | 0.821 | 0.725 | 0.970 | 0.752 | 0.780 |
| YOLOv8+CBAM | 0.845 | 0.740 | 0.995 | 0.780 | 0.790 |
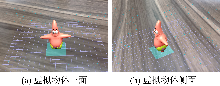
Fig. 4
3D registration of virtual objects based on SLAM
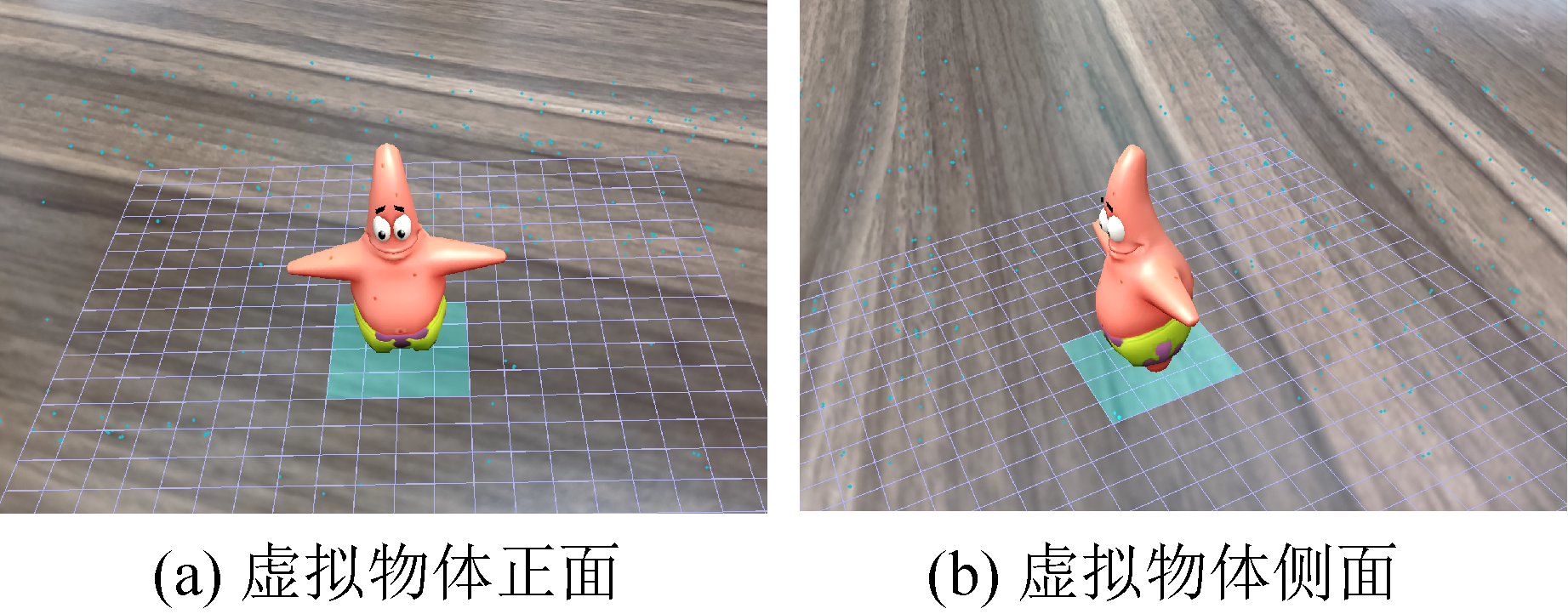
Fig. 5
AR construction process with dynamic object removal
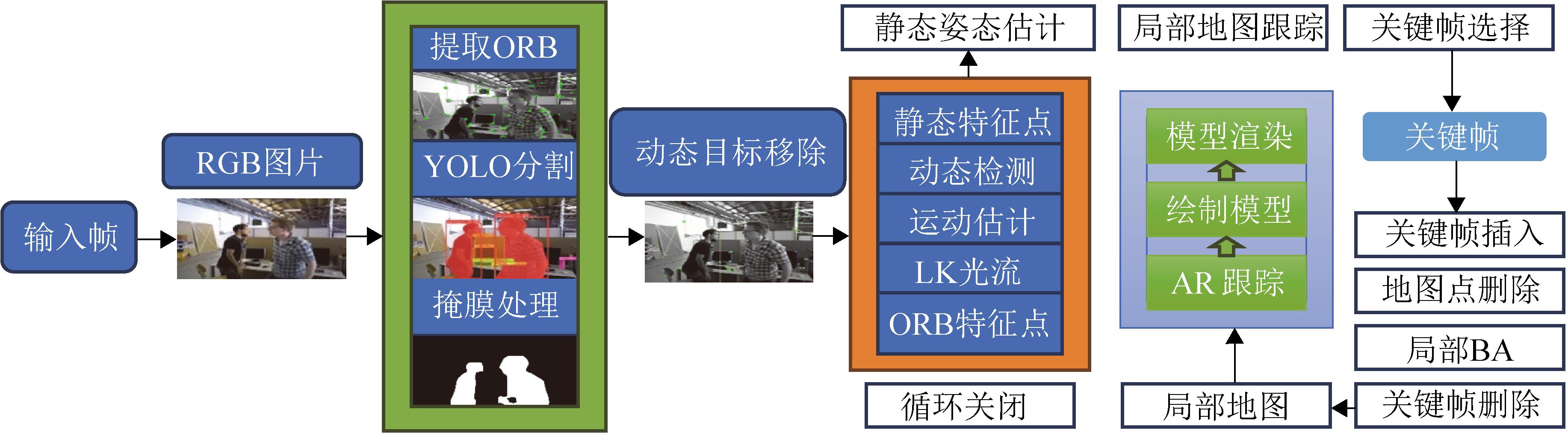
Fig. 6
LK optical flow diagram
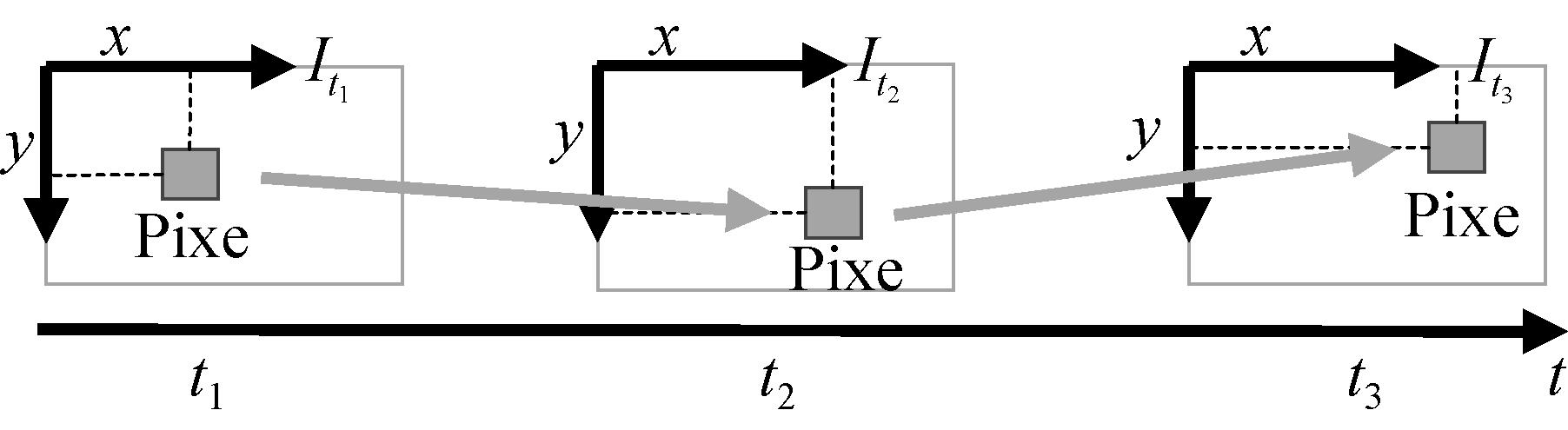
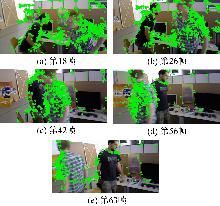
Fig. 7
Optical flow method for tracking moving objects
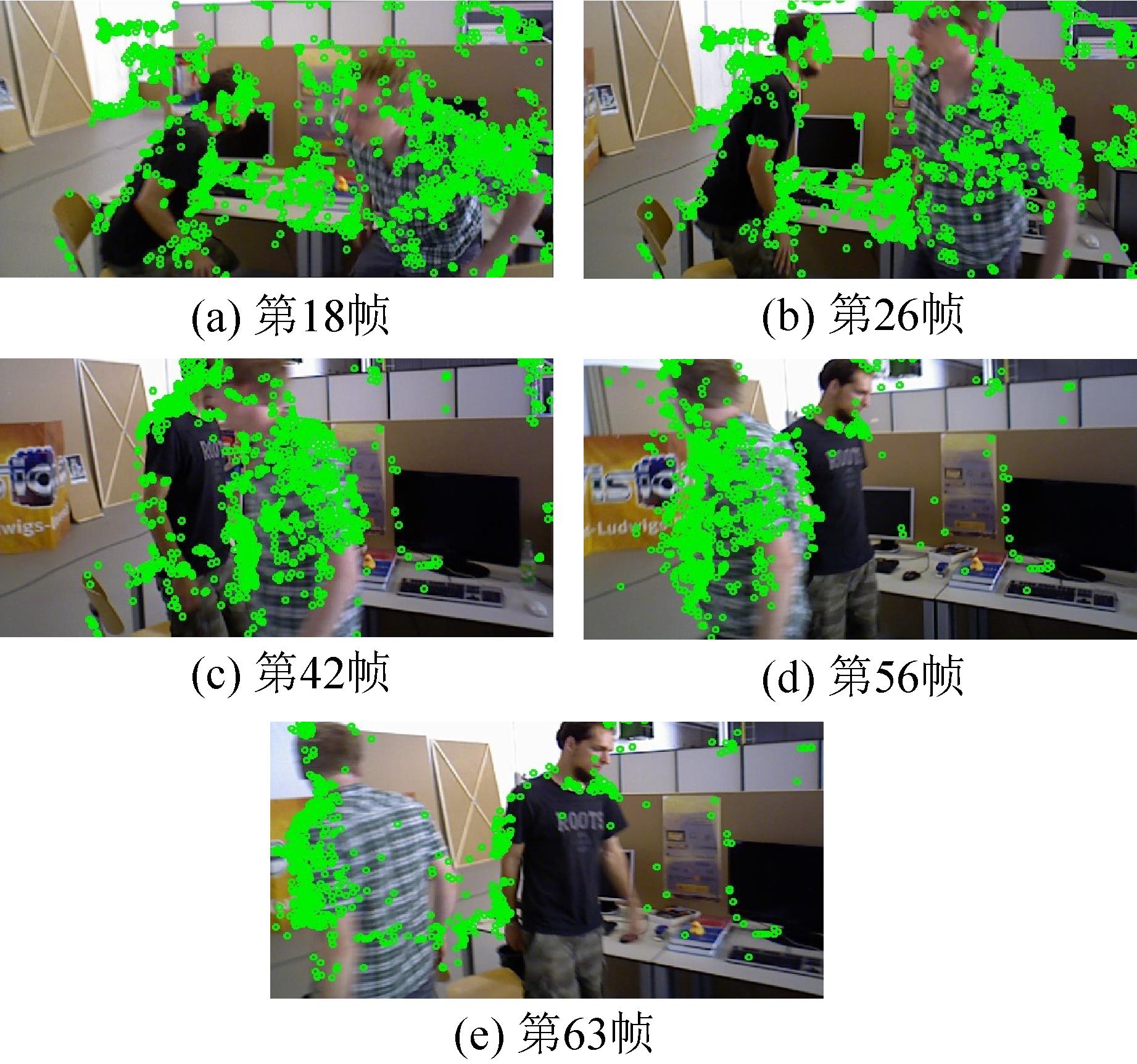
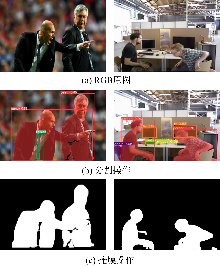
Fig. 8
Segmentation and mask effects of YOLOv8
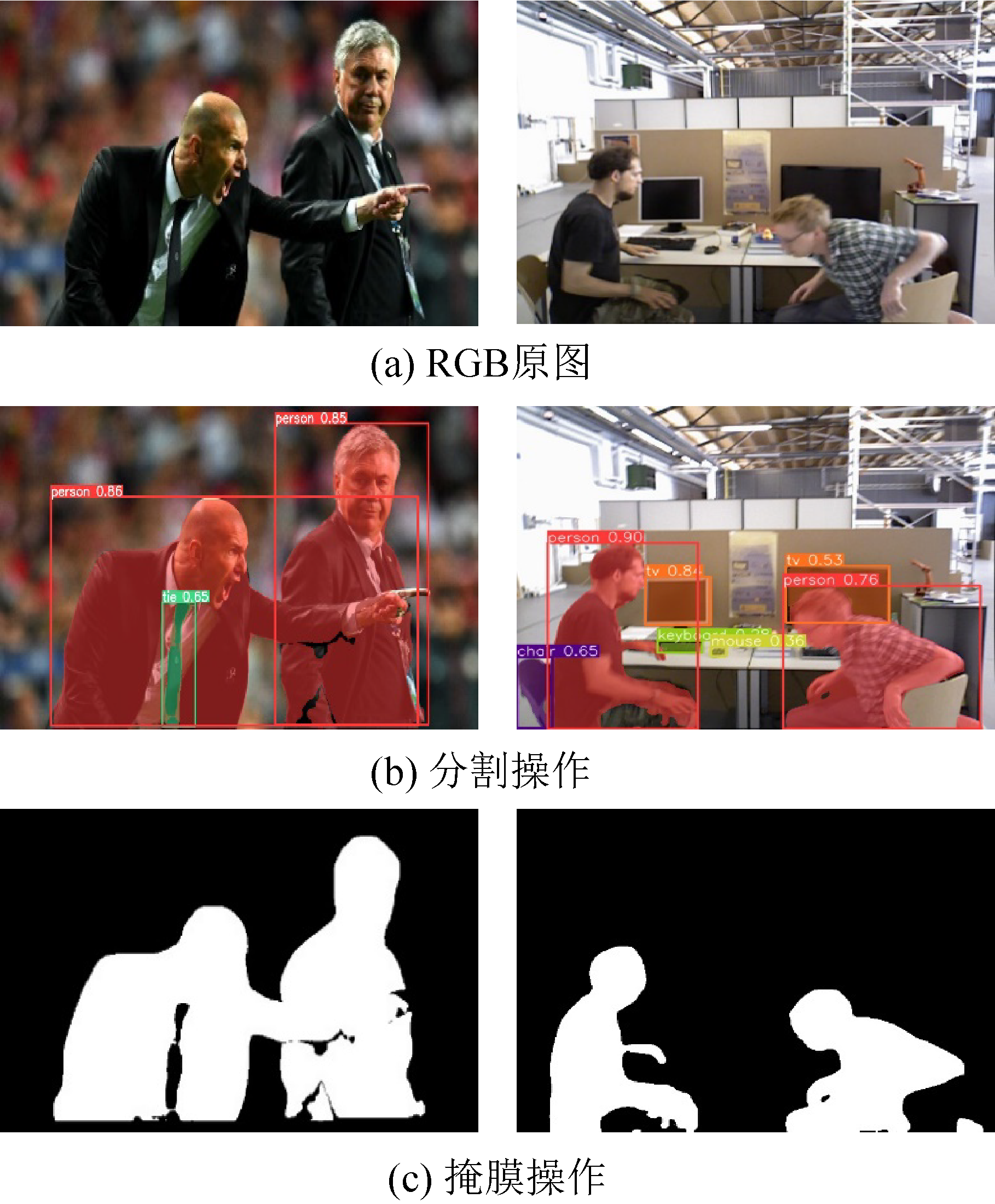
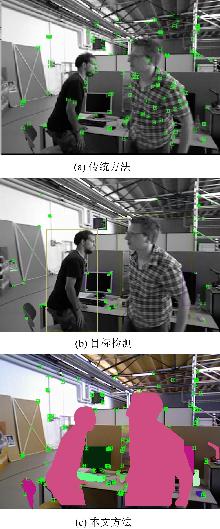
Fig. 9
Dynamic feature point removal experiment
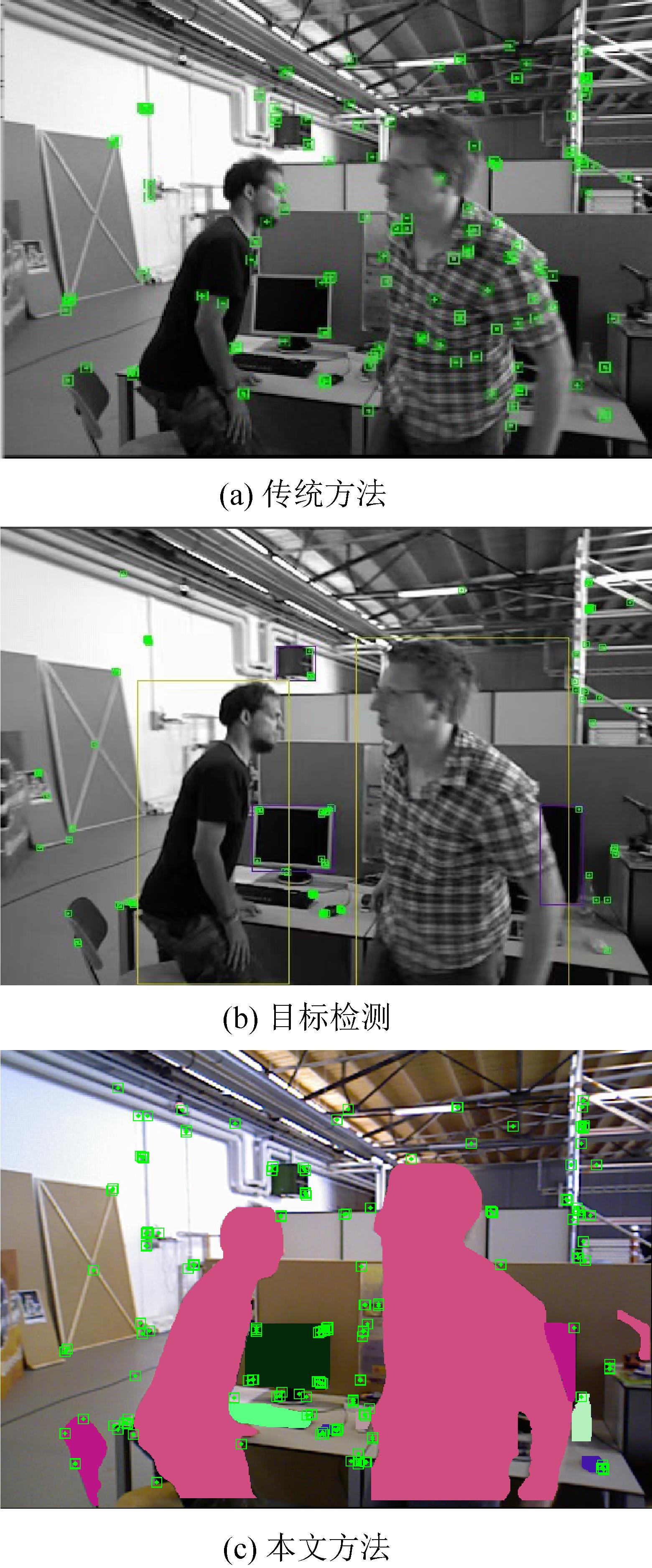
Fig. 10
Comparison of mapping effects
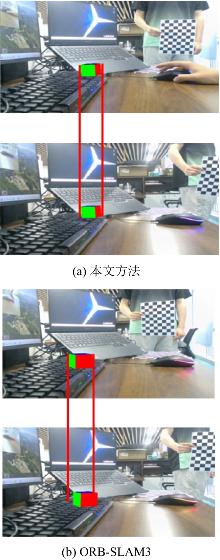
Fig. 11
Virtual object offset experiment
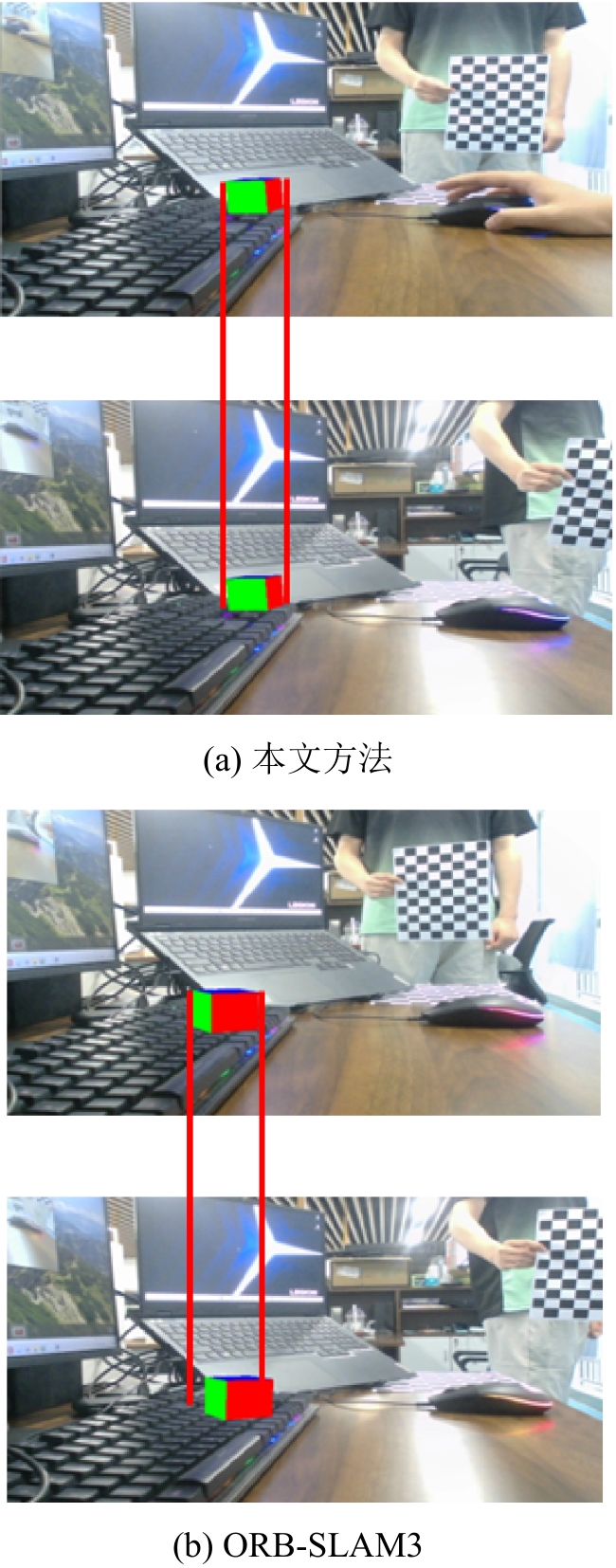
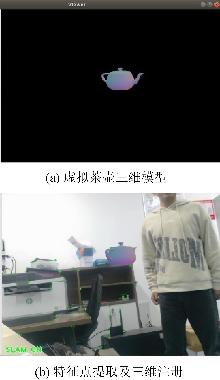
Fig. 12
3D registration after dynamic feature point removal
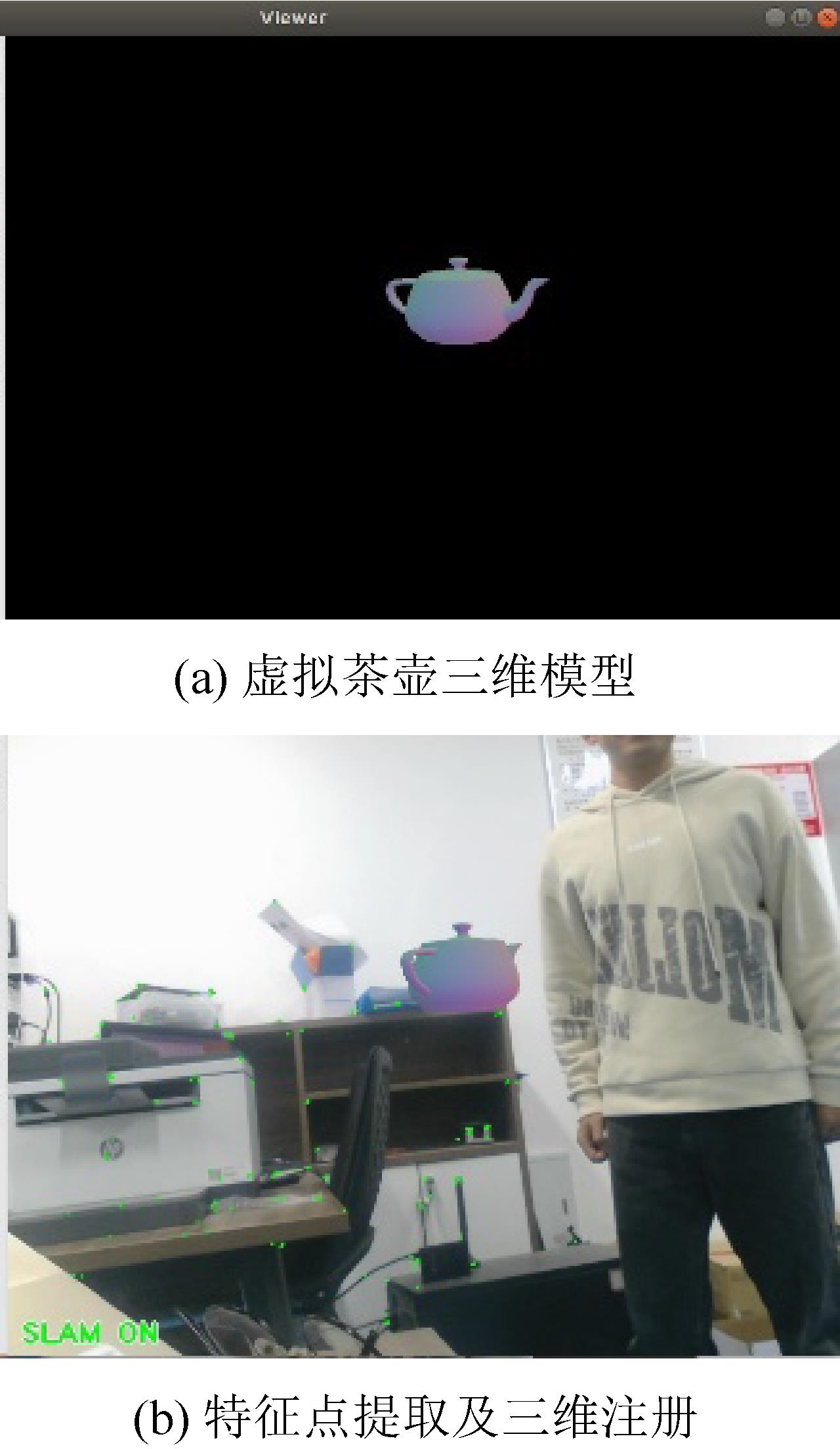
Table 2
Comparison of absolute trajectory error for different SLAM methods
| 序列 | ORB-SLAM3[ | RDS-SLAM[ | DS-SLAM[ | 本文方法 | ||||
|---|---|---|---|---|---|---|---|---|
| RMSE | SD | RMSE | SD | RMSE | SD | RMSE | SD | |
| f3_walk_xyz | 0.273 6 | 0.123 7 | 0.056 8 | 0.022 4 | 0.023 9 | 0.016 0 | 0.013 5 | 0.006 8 |
| f3_walk_half | 0.273 9 | 0.110 6 | 0.080 2 | 0.043 2 | 0.031 2 | 0.013 8 | 0.027 6 | 0.015 2 |
| f3_walk_rpy | 0.662 1 | 0.290 6 | 0.160 4 | 0.087 1 | 0.444 0 | 0.235 0 | 0.031 7 | 0.018 0 |
| fr3_sit_static | 0.008 5 | 0.004 2 | 0.008 4 | 0.004 1 | 0.005 9 | 0.003 1 | 0.006 0 | 0.003 1 |
Table 3
Comparison of relative pose error for different SLAM methods
| 序列 | ORB-SLAM3[ | RDS-SLAM[ | DS-SLAM[ | 本文方法 | ||||
|---|---|---|---|---|---|---|---|---|
| RMSE | SD | RMSE | SD | RMSE | SD | RMSE | SD | |
| f3_walk_xyz | 0.151 2 | 0.123 5 | 0.041 6 | 0.022 4 | 0.034 0 | 0.023 1 | 0.011 5 | 0.006 4 |
| f3_walk_half | 0.153 1 | 0.096 8 | 0.047 9 | 0.035 1 | 0.028 4 | 0.014 8 | 0.013 4 | 0.007 7 |
| f3_walk_rpy | 0.385 2 | 0.315 6 | 0.132 0 | 0.116 2 | 0.161 1 | 0.117 5 | 0.019 2 | 0.012 2 |
| fr3_sit_static | 0.009 5 | 0.005 2 | 0.011 3 | 0.007 1 | 0.007 5 | 0.003 1 | 0.005 0 | 0.002 7 |
Table 4
Comparison of accuracy improvement results of proposed method with other dynamic SLAM methods %
| 序列 | SG-SLAM[ | RDS-SLAM[ | RTD-SLAM[ | 本文方法 |
|---|---|---|---|---|
| fr3_walking_xyz | 94.90 | 91.68 | 95.57 | 95.07 |
| fr3_walking_rpy | 79.50 | 90.68 | 92.46 | 95.21 |
| fr3_walking_half | 95.78 | 84.46 | 90.13 | 89.91 |
Fig. 13
Comparison of APE between ORB-SLAM3 and proposed method
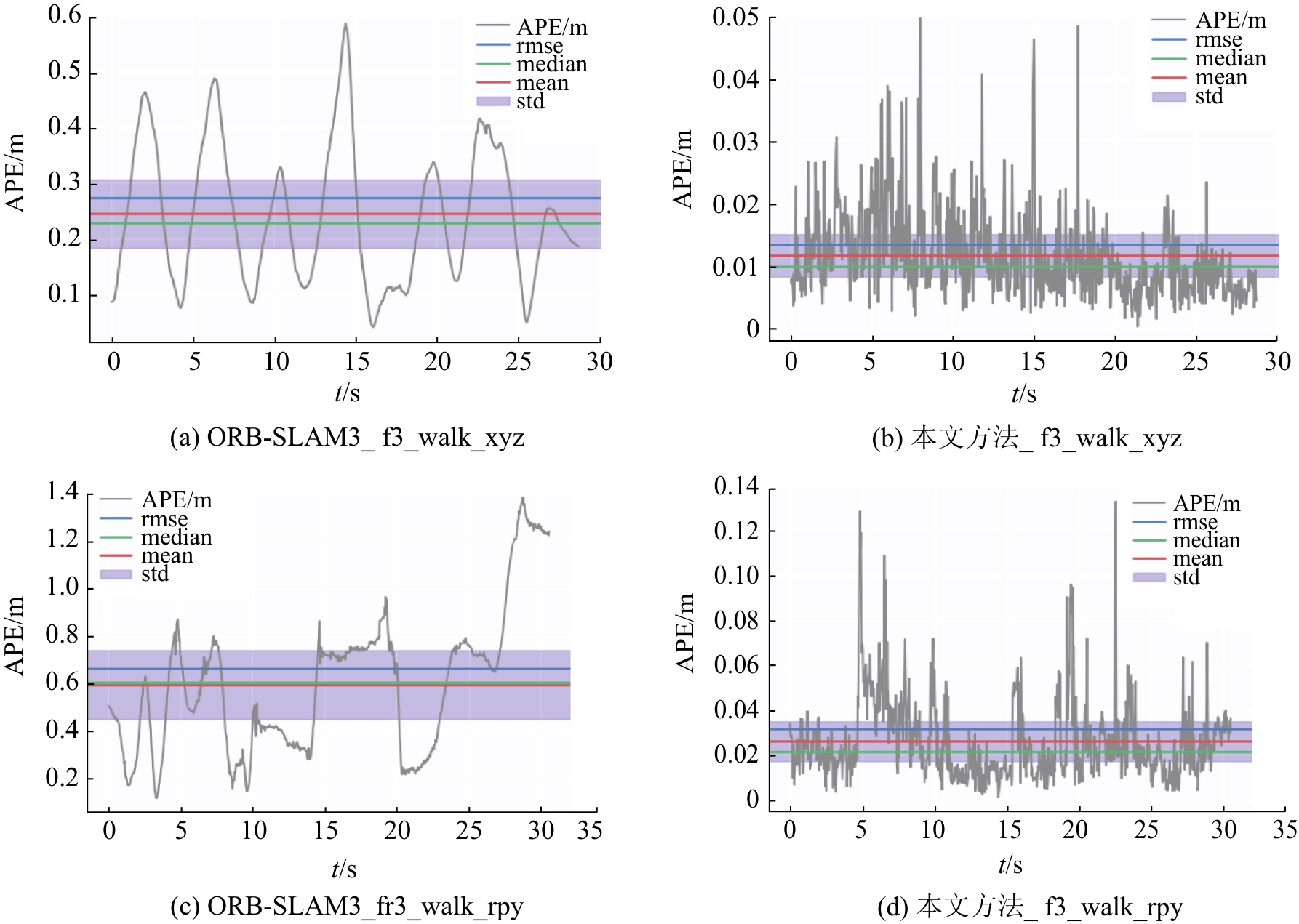

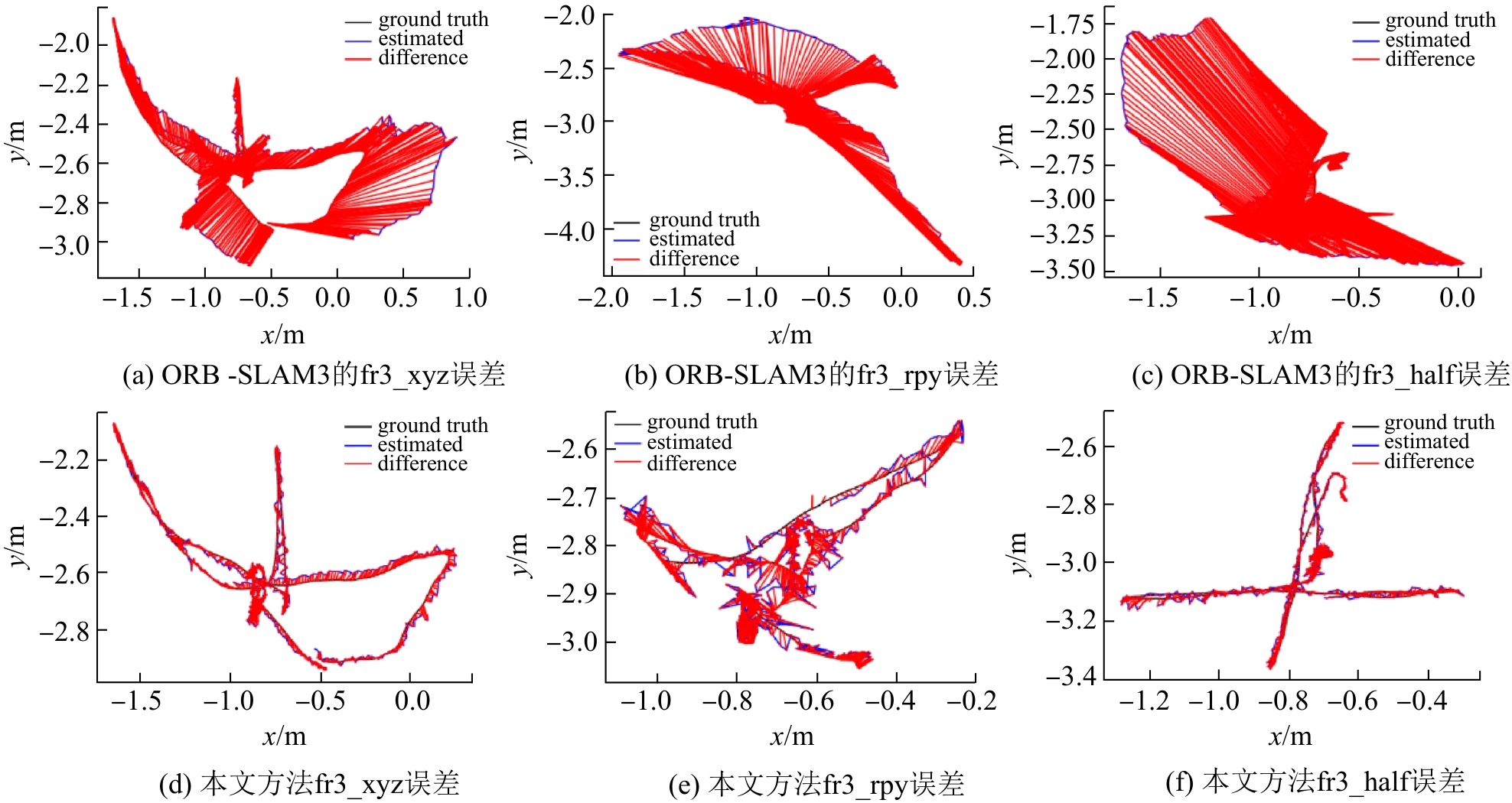
Fig. 14
Comparison of ATE between ORB-SLAM3 and proposed method
| [1] | Chen Yunqiang, Wang Qing, Chen Hong, et al. An Overview of Augmented Reality Technology[J]. Journal of Physics: Conference Series, 2019, 1237(2): 022082. |
| [2] | Li Jinyu, Yang Bangbang, Chen Danpeng, et al. Survey and Evaluation of Monocular Visual-inertial SLAM Algorithms for Augmented Reality[J]. Virtual Reality & Intelligent Hardware, 2019, 1(4): 386-410. |
| [3] | 侯守明, 韩吉, 张煜东, 等. 基于视觉的增强现实三维注册技术综述[J]. 系统仿真学报, 2019, 31(11): 2206-2215. |
| Hou Shouming, Han Ji, Zhang Yudong, et al. Survey of Vision-based Augmented Reality 3D Registration Technology[J]. Journal of System Simulation, 2019, 31(11): 2206-2215. | |
| [4] | Lowe D G. Distinctive Image Features from Scale-invariant Keypoints[J]. International Journal of Computer Vision, 2004, 60(2): 91-110. |
| [5] | Bay Herbert, Tuytelaars Tinne, Luc Van Gool. SURF: Speeded Up Robust Features[C]//Computer Vision – ECCV 2006. Berlin: Springer Berlin Heidelberg, 2006: 404-417. |
| [6] | Rublee E, Rabaud V, Konolige K, et al. ORB: An Efficient Alternative to SIFT or SURF[C]//2011 International Conference on Computer Vision. Piscataway: IEEE, 2011: 2564-2571. |
| [7] | Leonard J J, Durrant-Whyte H F. Simultaneous Map Building and Localization for an Autonomous Mobile Robot[C]//Proceedings IROS '91: IEEE/RSJ International Workshop on Intelligent Robots and Systems '91. Piscataway: IEEE, 1991: 1442-1447 vol.3. |
| [8] | Klein G, Murray D. Parallel Tracking and Mapping for Small AR Workspaces[C]//2007 6th IEEE and ACM International Symposium on Mixed and Augmented Reality. Piscataway: IEEE, 2007: 225-234. |
| [9] | Mur-Artal Raúl, Montiel J M M, Tardós Juan D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System[J]. IEEE Transactions on Robotics, 2015, 31(5): 1147-1163. |
| [10] | Campos Carlos, Elvira Richard, J Gómez Rodríguez Juan, et al. ORB-SLAM3: An Accurate Open-source Library for Visual, Visual-inertial, and Multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| [11] | Li Jinyu, Pan Xiaokun, Huang Gan, et al. RD-VIO: Robust Visual-inertial Odometry for Mobile Augmented Reality in Dynamic Environments[J]. IEEE Transactions on Visualization and Computer Graphics, 2024, 30(10): 6941-6955. |
| [12] | Tan Wei, Liu Haomin, Dong Zilong, et al. Robust Monocular SLAM in Dynamic Environments[C]//2013 IEEE International Symposium on Mixed and Augmented Reality (ISMAR). Piscataway: IEEE, 2013: 209-218. |
| [13] | 史蓝兮, 颜文旭, 倪宏宇, 等. 基于改进目标检测的动态场景SLAM研究[J]. 系统仿真学报, 2024, 36(4): 1028-1042. |
| Shi Lanxi, Yan Wenxu, Ni Hongyu, et al. Research on Dynamic Scene SLAM Based on Improved Object Detection[J]. Journal of System Simulation, 2024, 36(4): 1028-1042. | |
| [14] | Saputra M R U, Markham A, Trigoni N. Visual SLAM and Structure from Motion in Dynamic Environments: A Survey[J]. ACM Computing Surveys, 2018, 51(2): 37. |
| [15] | Alcantarilla Pablo F, Yebes José J, Almazán Javier, et al. On Combining Visual SLAM and Dense Scene Flow to Increase the Robustness of Localization and Mapping in Dynamic Environments[C]//2012 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2012: 1290-1297. |
| [16] | Mei Jianfeng, Zuo Tao, Song Dong. Highly Dynamic Visual SLAM Dense Map Construction Based on Indoor Environments[J]. IEEE Access, 2024, 12: 38717-38731. |
| [17] | Bescos Berta, Fácil José M, Civera Javier, et al. DynaSLAM: Tracking, Mapping, and Inpainting in Dynamic Scenes[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 4076-4083. |
| [18] | Wu Wenxin, Guo Liang, Gao Hongli, et al. YOLO-SLAM: A Semantic SLAM System Towards Dynamic Environment with Geometric Constraint[J]. Neural Computing and Applications, 2022, 34(8): 6011-6026. |
| [19] | Zhang Yuhao. NGD-SLAM: Towards Real-time SLAM for Dynamic Environments without GPU[EB/OL]. (2024-05-12) [访问日期]. . |
| [20] | Han Shuangquan, Xi Zhihong. Dynamic Scene Semantics SLAM Based on Semantic Segmentation[J]. IEEE Access, 2020, 8: 43563-43570. |
| [21] | Gabriel Fischer Abati, João Carlos Virgolino Soares, Vivian Suzano Medeiros, et al. Panoptic-SLAM: Visual SLAM in Dynamic Environments Using Panoptic Segmentation[EB/OL]. (2024-05-03) [访问日期]. . |
| [22] | Yu Chao, Liu Zuxin, Liu Xinjun, et al. DS-SLAM: A Semantic Visual SLAM towards Dynamic Environments[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2018: 1168-1174. |
| [23] | Zhu Xizhou, Cheng Dazhi, Zhang Zheng, et al. An Empirical Study of Spatial Attention Mechanisms in Deep Networks[C]//2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2019: 6687-6696. |
| [24] | Hu Jie, Shen Li, Sun Gang. Squeeze-and-excitation Networks[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7132-7141. |
| [25] | Woo Sanghyun, Park Jongchan, Lee J Y, et al. CBAM: Convolutional Block Attention Module[C]//Computer Vision – ECCV 2018. Cham: Springer International Publishing, 2018: 3-19. |
| [26] | Lin T Y, Maire M, Belongie S, et al. Microsoft COCO: Common Objects in Context[C]//Computer Vision – ECCV 2014. Cham: Springer International Publishing, 2014: 740-755. |
| [27] | Tang Baihui, Liu Zhengyi, Cao Sanxing. AR Application Research Based on ORB-SLAM[C]//VR/AR and 3D Displays. Singapore: Springer Singapore, 2021: 78-88. |
| [28] | Singla Nishu. Motion Detection Based on Frame Difference Method[J]. International Journal of Information & Computation Technology, 2014, 4(15): 1559-1565. |
| [29] | Wang Zhen, Yang Xiaojun. Moving Target Detection and Tracking Based on Pyramid Lucas-Kanade Optical Flow[C]//2018 IEEE 3rd International Conference on Image, Vision and Computing (ICIVC). Piscataway: IEEE, 2018: 66-69. |
| [30] | He Jiaming, Li Mingrui, Wang Yangyang, et al. OVD-SLAM: An Online Visual SLAM for Dynamic Environments[J]. IEEE Sensors Journal, 2023, 23(12): 13210-13219. |
| [31] | Liu Yubao, Miura Jun. RDS-SLAM: Real-time Dynamic SLAM Using Semantic Segmentation Methods[J]. IEEE Access, 2021, 9: 23772-23785. |
| [32] | Cheng Shuhong, Sun Changhe, Zhang Shijun, et al. SG-SLAM: A Real-time RGB-D Visual SLAM Toward Dynamic Scenes with Semantic and Geometric Information[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 1-12. |
| [33] | Su Peng, Luo Suyun, Huang Xiaoci. Real-time Dynamic SLAM Algorithm Based on Deep Learning[J]. IEEE Access, 2022, 10: 87754-87766. |
| [1] | Chen Yanjun, Zhou Min, Zha Meng, Zhang Meizhou. Research and Analysis of Algorithm for Detecting Surface Defects on Automotive Wheel Hubs Based on CCL-YOLOv8 [J]. Journal of System Simulation, 2026, 38(3): 670-686. |
| [2] | Li Xinyi, Wang Zhenfei, Wu Han. Research on UAV Target Tracking Algorithm for Simulation Scenarios [J]. Journal of System Simulation, 2026, 38(2): 346-359. |
| [3] | Zhu He, Zhou Feng, Zhang Qi, Zhu Mengxiao, Dai Ju. PL-Mamba: A 3D Point Cloud Semantic Segmentation Network Based on Bimodal Fusion [J]. Journal of System Simulation, 2026, 38(1): 73-83. |
| [4] | Lu Bin, Yang Xuan, Yang Zhenyu, Gao Xiaotian. Adaptive Sampling and Ghost Multi-scale Fusion for Lightweight Weld Defect Detection [J]. Journal of System Simulation, 2025, 37(8): 1978-1990. |
| [5] | Li Jie, Liu Yang, Li Liang, Su Bengan, Wei Jialong, Zhou Guangda, Shi Yanmin, Zhao Zhen. Remote Sensing Small Object Detection Based on Cross-stage Two-branch Feature Aggregation [J]. Journal of System Simulation, 2025, 37(4): 1025-1040. |
| [6] | Li Ruoqing, Zhao Yaochi, Hu Zhuhua, Qi Wenlu, Liu Guangfeng. TOHF: A Feature Extractor for Resource-constrained Indoor VSLAM [J]. Journal of System Simulation, 2025, 37(3): 691-703. |
| [7] | Wang He, Xu Jianing, Yan Guangyu. Research on Pedestrian Avoidance Strategy for AGV Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(3): 595-606. |
| [8] | Wu Shuheng, Liu Yongkui, Zhang Lin, Xiao Yingying, Wang Lihui. Lightweight Assembly Workpiece Detection Algorithm Based on Improved YOLOv8 [J]. Journal of System Simulation, 2025, 37(12): 3099-3111. |
| [9] | Fu Qiang, Teng Xianyun, Ji Yuanfa, Ren Fenghua. SLAM Dynamic Algorithm Based on Improved Feature Description [J]. Journal of System Simulation, 2024, 36(11): 2712-2721. |
| [10] | Yun Wei, Qi Luo, Yingzhi Zhao. Semantic Segmentation Model Based on Adaptive Fusion and Attention Refinement [J]. Journal of System Simulation, 2023, 35(6): 1226-1234. |
| [11] | Zhao Weiping, Chen Yu, Xiang Song, Liu Yuanqiang, Wang Chaoyue. Image Semantic Segmentation Algorithm Based on Improved DeepLabv3+ [J]. Journal of System Simulation, 2023, 35(11): 2333-2344. |
| [12] | Qizong Shen, Chunyan Gao. Research on Semantic Segmentation of Natural Landform Based on Edge Detection Module [J]. Journal of System Simulation, 2022, 34(2): 293-302. |
| [13] | Hong Sun, Yuelan Ling, Yuxiang Zhang. Research on Improved Feature Pyramid Algorithm Integrating Border Supervision Strategy [J]. Journal of System Simulation, 2022, 34(10): 2119-2129. |
| [14] | Chen Lijia, Wang Kai, Li Shigang, Tian Yanfei. Fast Maritime Simulator Scene Modeling Method Based on Aerial Images [J]. Journal of System Simulation, 2021, 33(7): 1565-1573. |
| [15] | Hou Shouming, Han Ji, Zhang Yudong, Zhu Ziqiu. Survey of Vision-Based Augmented Reality 3D Registration Technology [J]. Journal of System Simulation, 2019, 31(11): 2206-2215. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
