

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (6): 1684-1698.doi: 10.16182/j.issn1004731x.joss.25-0682
• Papers • Previous Articles Next Articles
Ren Wenzhe1, Li Min1, Zeng Xiangguang1, Zhang Tao1, Xie Dijie1, Peng Bei2
Received:2025-07-16
Revised:2025-09-15
Online:2026-06-25
Published:2026-06-25
Contact:
Li Min
CLC Number:
Ren Wenzhe, Li Min, Zeng Xiangguang, Zhang Tao, Xie Dijie, Peng Bei. Research on Control Strategy for Shortest Time Occupancy of AUV Based on Improved TD3[J]. Journal of System Simulation, 2026, 38(6): 1684-1698.
Fig. 1
Feasible domain for occupancy
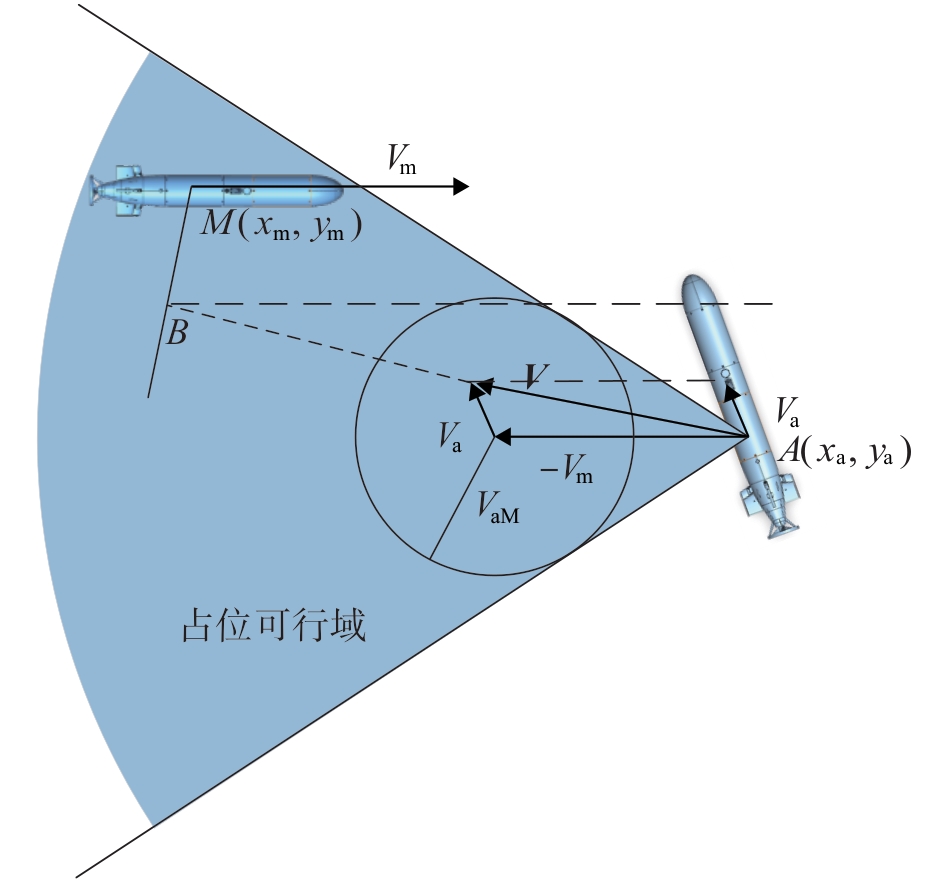
Fig. 2
AUV coordinate system
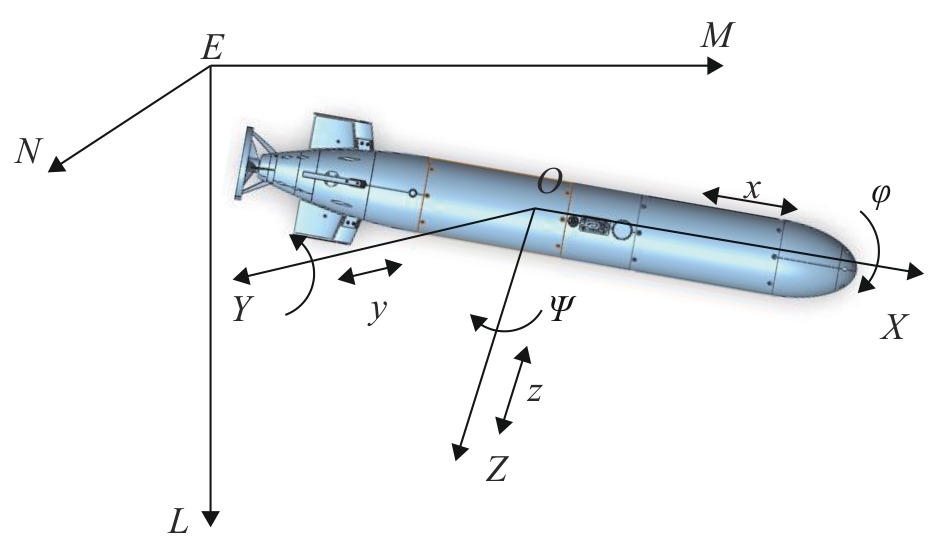
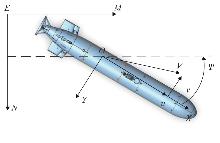
Fig. 3
Planar motion coordinate system of AUV
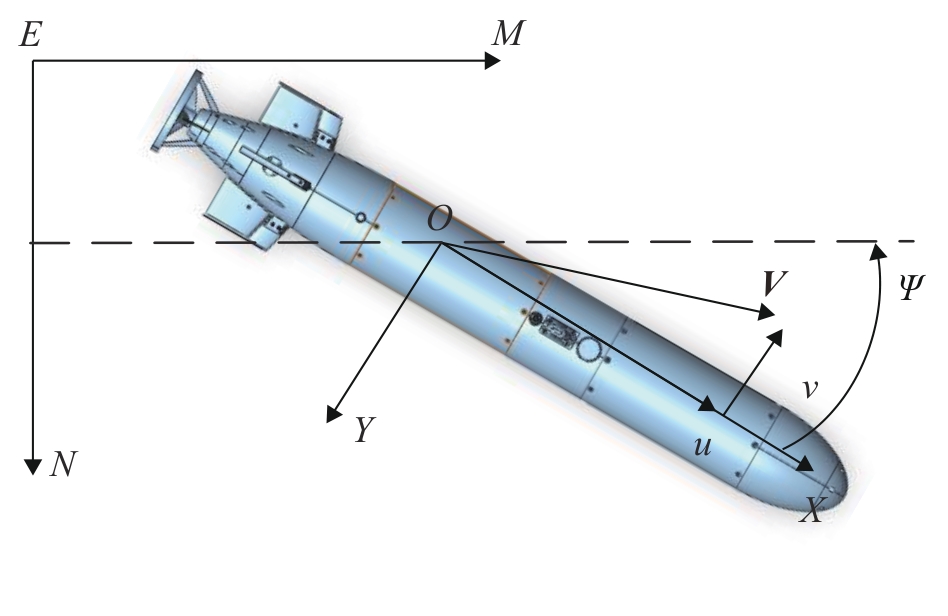

Fig. 4
Bayesian inference framework
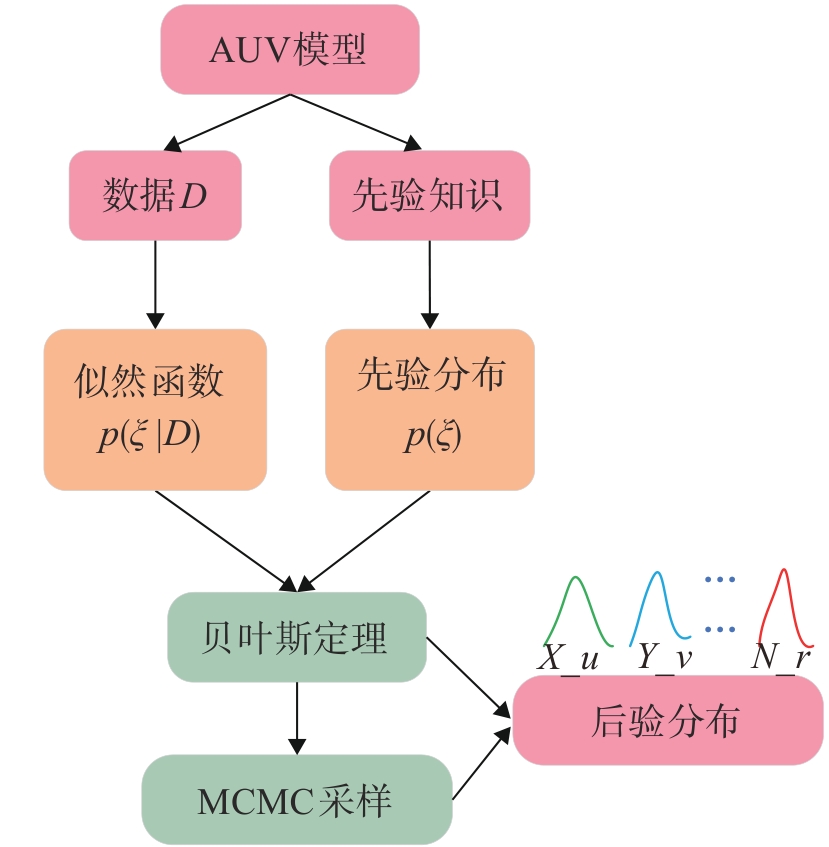
Table 1
Range and distribution of dynamic parameters
| 参数 | 物理意义 | 一般范围 | 先验分布 |
|---|---|---|---|
| 纵向线性阻尼系数 | (-10, 10) | 正态分布 | |
| 纵向二次阻尼系数 | (5, 20) | 半正态分布 | |
| 侧向线性阻尼系数 | (0, 50) | 半正态分布 | |
| 侧向二次阻尼系数 | (100, 3 000) | 半正态分布 | |
| 艏摇线性阻尼系数 | (0, 20) | 半正态分布 | |
| 艏摇二次阻尼系数 | (10, 300) | 半正态分布 | |
| 耦合阻尼系数 | (0, 20) | 半正态分布 | |
| 耦合阻尼系数 | (0, 100) | 半正态分布 | |
| 纵向附加质量 | (-10, -0.5) | 负半正态分布 | |
| 侧向附加质量 | (-100, -10) | 负半正态分布 | |
| 横摇附加惯性矩 | (-20, -1) | 负半正态分布 | |
| 耦合附加质量 | (-10, -1) | 负半正态分布 |
Table 2
Posterior predictive values of dynamic parameters
| 参数 | 后验预测值 | 参数 | 后验预测值 |
|---|---|---|---|
| 0.169 | 5.017 | ||
| 8.109 | 36.099 | ||
| 9.766 | -1.399 | ||
| 200.666 | -38.537 | ||
| 5.007 | -8.877 | ||
| 15.058 | -2.538 |
Table 3
R2 value of dynamic parameters
| 输入 | 平均值 | |||
|---|---|---|---|---|
| 恒定 | 0.999 9 | 0.999 9 | 0.999 5 | 0.999 8 |
| 正弦 | 0.999 9 | 0.999 8 | 0.999 9 | 0.999 9 |
| 方波 | 0.999 9 | 0.999 5 | 0.999 6 | 0.999 7 |
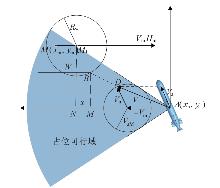
Fig. 5
Shortest time occupancy model
Fig. 6
Schematic diagram of ocean current variation

Fig. 7
Simulation system process
Table 4
Training hyperparameters
| 参数名称 | 参数值 |
|---|---|
| 策略网络学习率 | 1 |
| 价值网络学习率 | 3 |
| 折扣因子 | 0.99 |
| 软更新系数 | 5 |
| 经验池容量 | 1 |
| 每次训练样本数 | 512 |
| 训练最大回合数 | 4 000 |
| 每回合最大步数 | 460 |
| 神经元个数 | 256 |
| 分位数个数 | 16 |
| Huber损失阈值 | 1 |
Table 5
Values of ocean current model parameters
| 参数名称 | 参数值 |
|---|---|
| 洋流变化速率 | 0.01 |
| 洋流随机扰动幅度 | 5 |
| 洋流变化间隔/s | 5 |
| 弱洋流最大速度 | 0.1 |
| 强洋流最大速度 | 1.0 |
| 仿真步长 | 0.1 |
| 最大仿真时间/s | 46 |
| AUV最大推进力/N | 34 |
| AUV最大转矩/N | 10 |
Table 6
Setting of reward function parameters
| 参数名称 | 参数值 |
|---|---|
| 距离奖励系数 | 2 |
| 航向角度奖励系数 | 8 |
| 速度奖励系数 | 10 |
| 偏航惩罚系数 | 10 |
| 完成奖励 | 500 |
| 距离进展奖励系数 | 100 |
| 距离误差d/m | 3 |
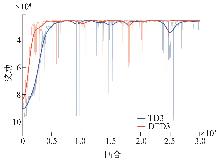
Fig. 8
Episode reward under weak ocean current
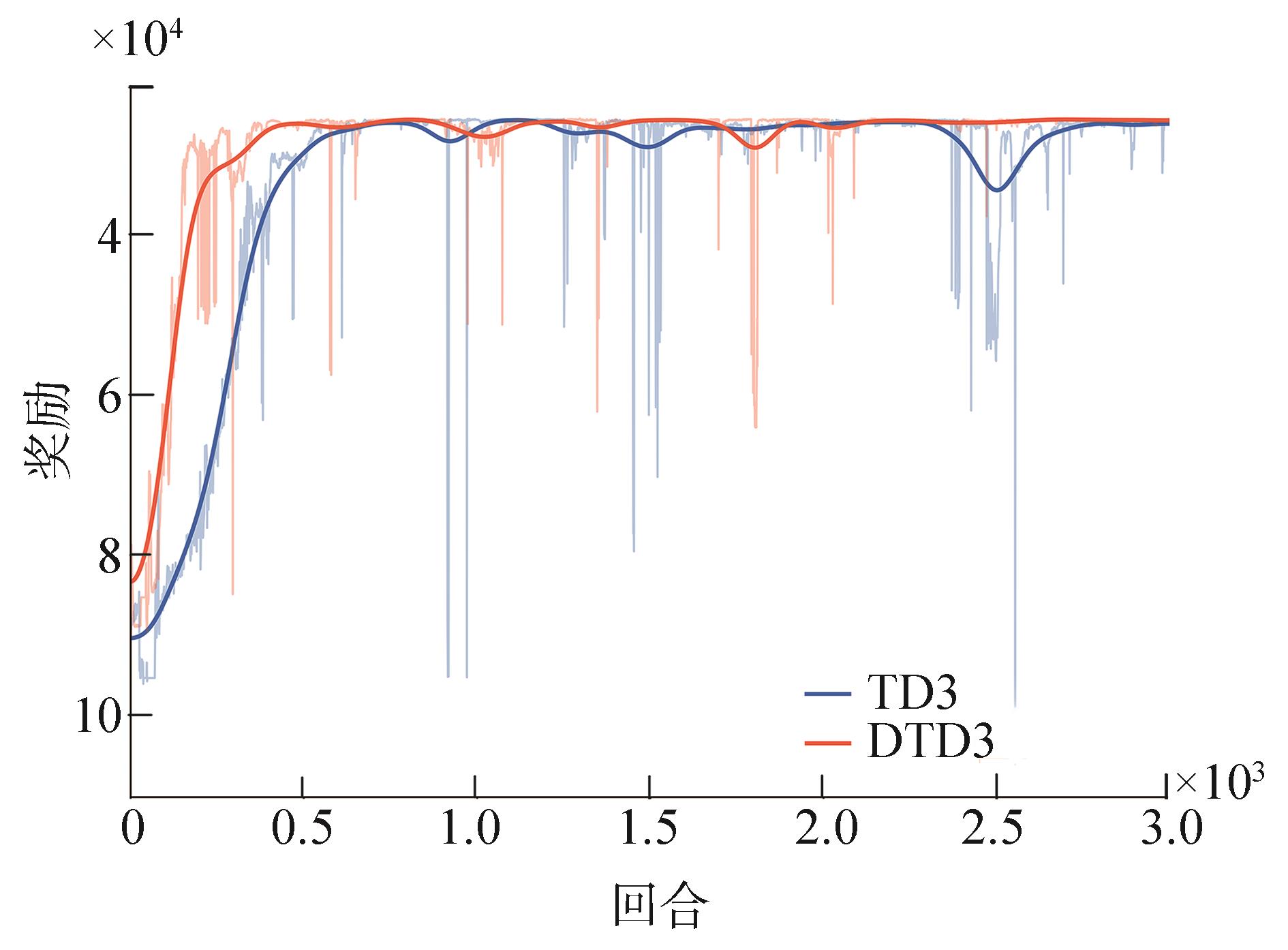
Fig. 9
Episode reward under strong ocean current
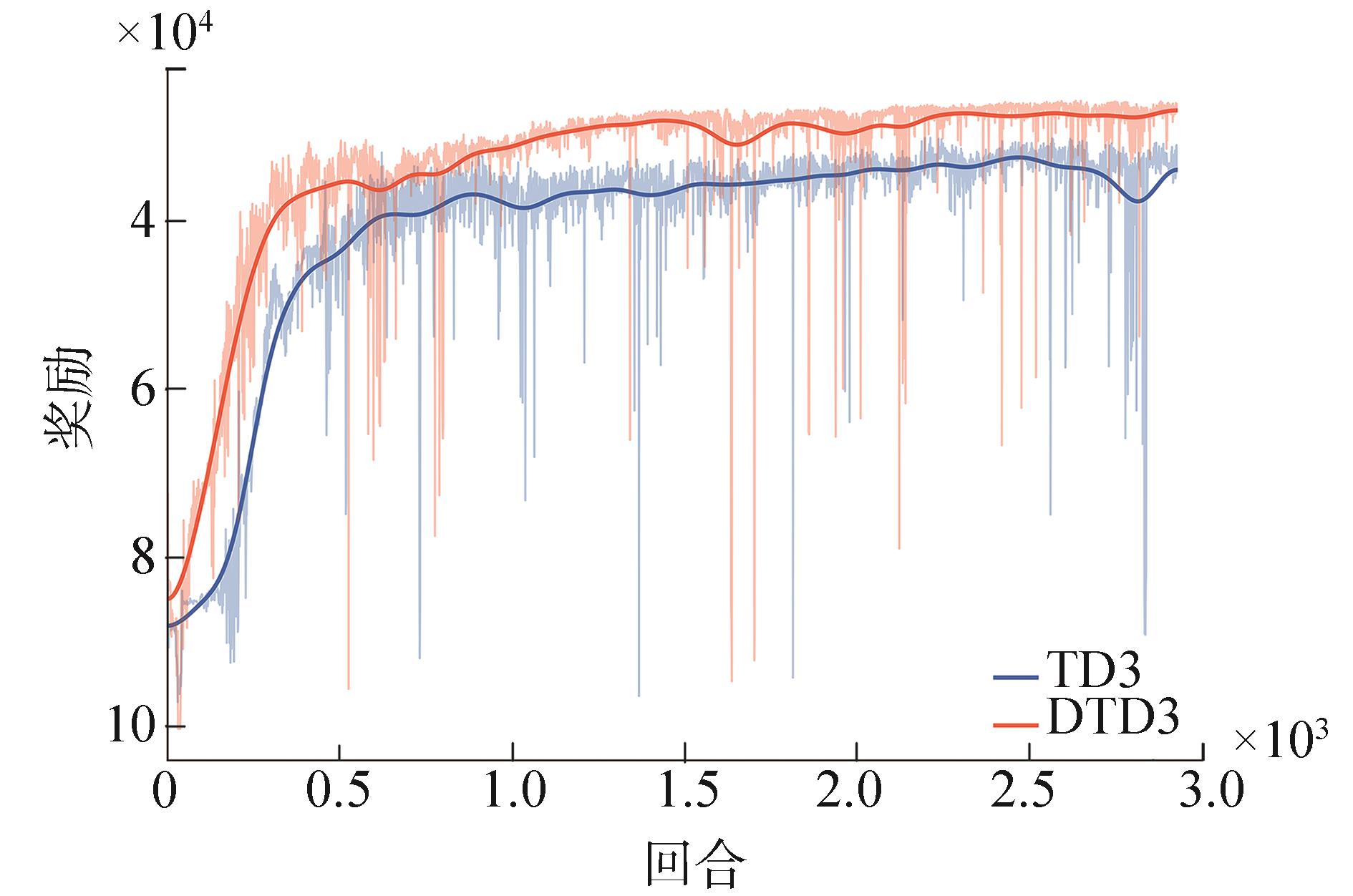
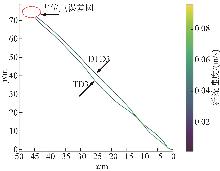
Fig. 10
Occupancy roadmap under weak ocean current
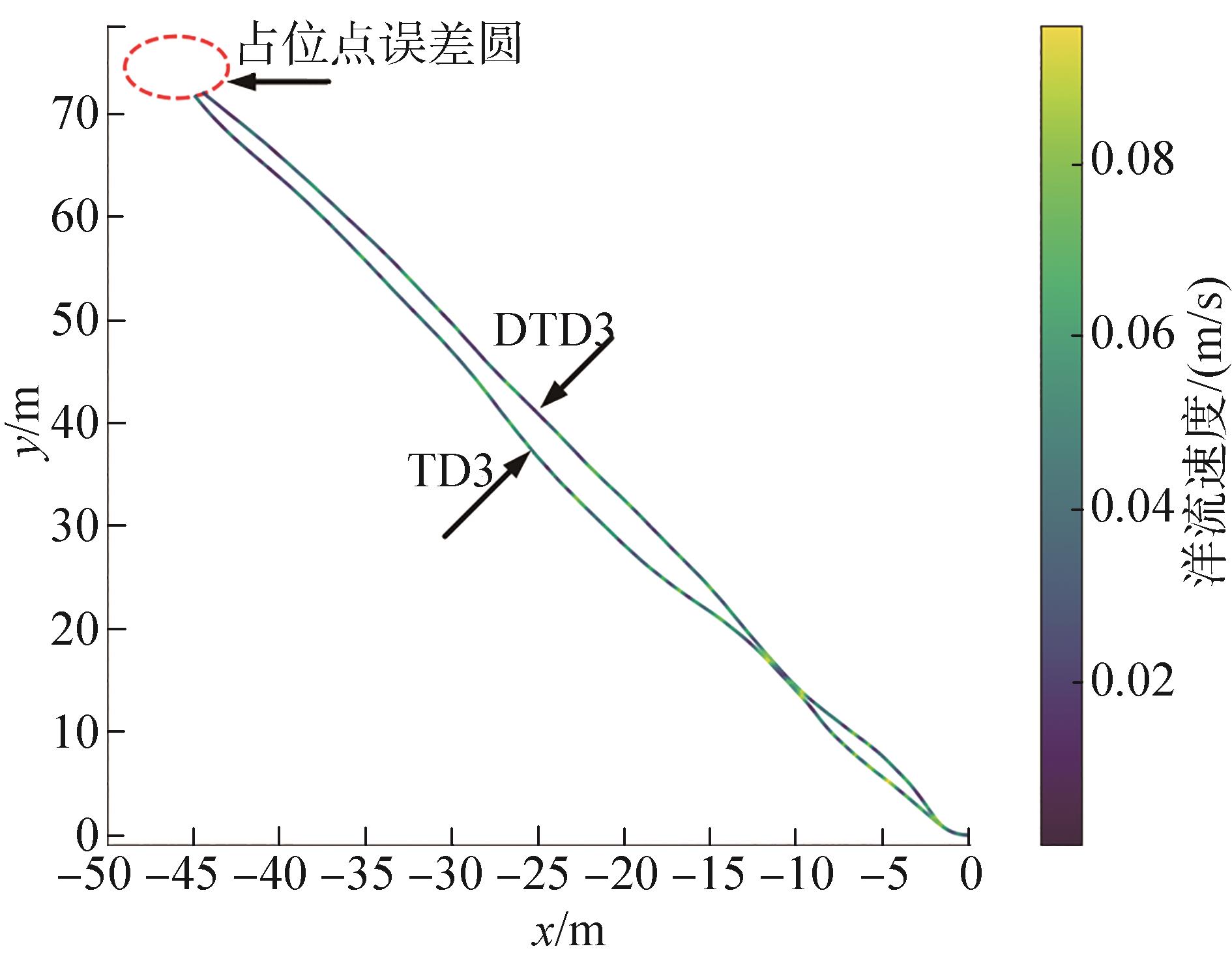
Fig. 11
Occupancy roadmap under strong ocean current
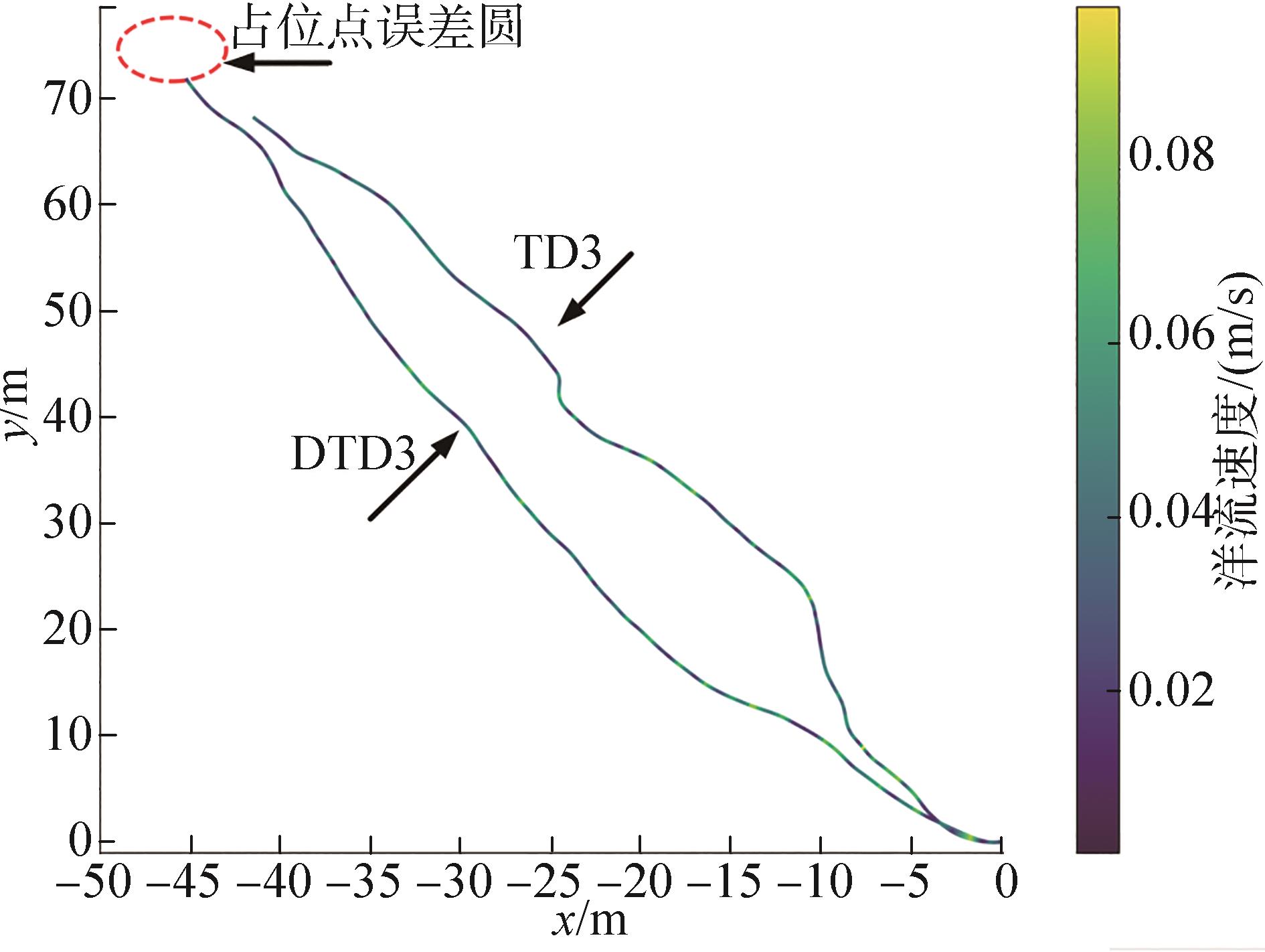
Table 7
Comparison results of test models
| 指标 | DTD3 | TD3 | |
|---|---|---|---|
| 弱洋流 | 时间/s | 44.4 | 45.0 |
| 坐标/m | (-44.50, 72.13) | (-44.96, 71.81) | |
| 时间误差/s | 0.61 | 1.21 | |
| 坐标误差/m | 2.83 | 2.91 | |
| 强洋流 | 时间/s | 44.1 | 46.0 |
| 坐标/m | (-45.24, 71.80) | (-41.51, 68.17) | |
| 时间误差/s | 0.31 | 2.21 | |
| 坐标误差/m | 2.83 | 7.79 | |
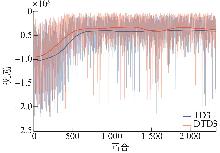
Fig. 12
Episode reward under weak ocean current
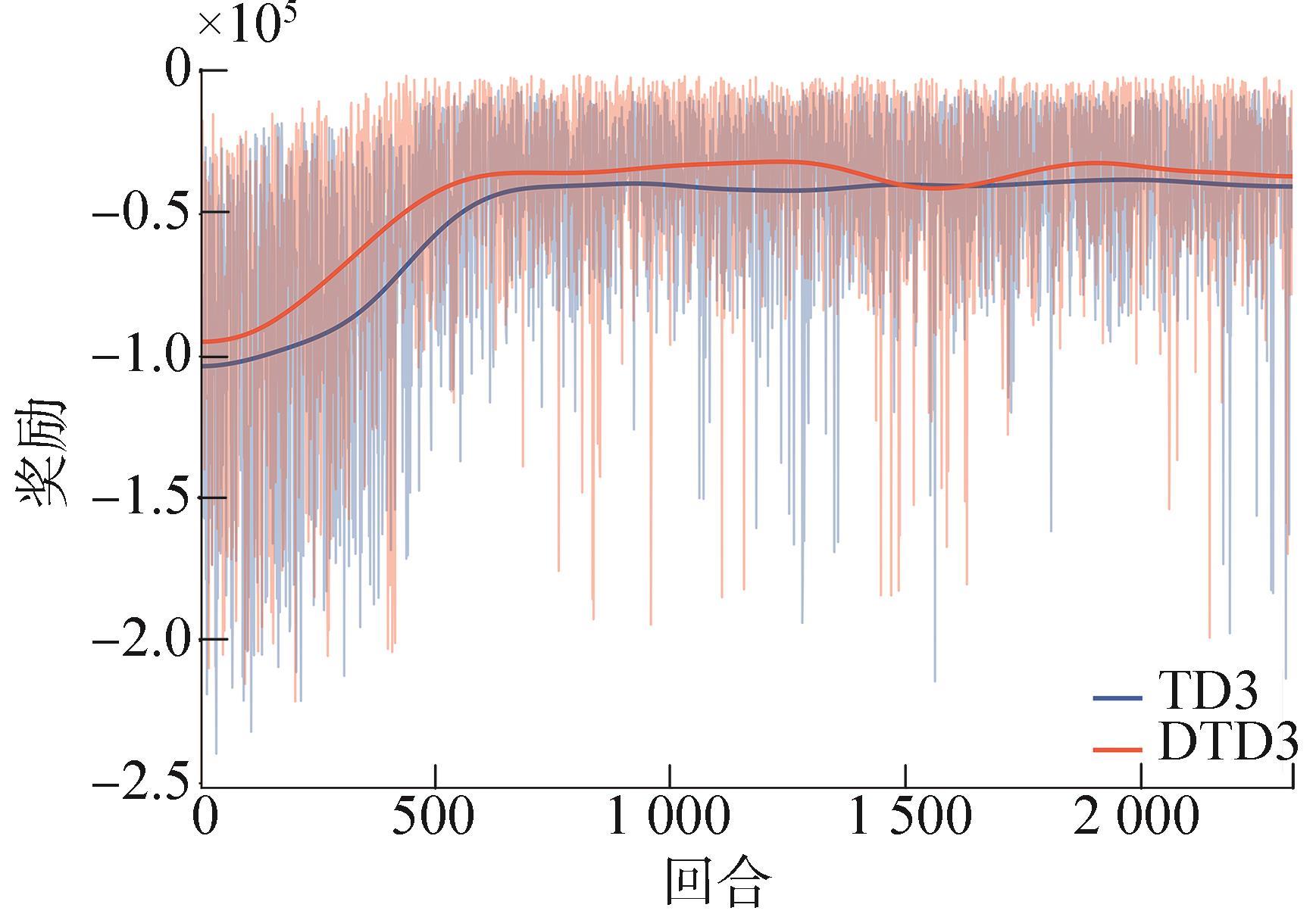
Fig. 13
Episode win rate under weak ocean current
Table 8
Comparison results of weak ocean current algorithm test set
| 算法 | 占位坐标/m | 占位时间/s | 实际坐标/m | 实际时间/s | 平均坐标误差/m | 平均时间误差/s |
|---|---|---|---|---|---|---|
| DTD3 | (-41.71, 55.11) | 34.6 | (-39.77, 53.07) | 35.3 | 2.86 | 1.2 |
| (-63.55, 121.38) | 68.5 | (-61.98, 119.03) | 70.5 | |||
| (-32.49, 74.58) | 40.7 | (-30.47, 72.47) | 41.9 | |||
| TD3 | (-69.91, 101.51) | 61.6 | (-68.41, 98.92) | 62.6 | 3.00 | 1.7 |
| (-36.52, 68.18) | 38.6 | (-35.42, 65.48) | 40.3 | |||
| (-50.92, 102.99) | 57.4 | (-52.30, 100.21) | 59.6 |
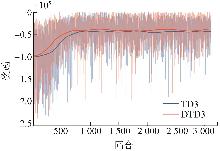
Fig. 14
Episode reward under strong ocean current
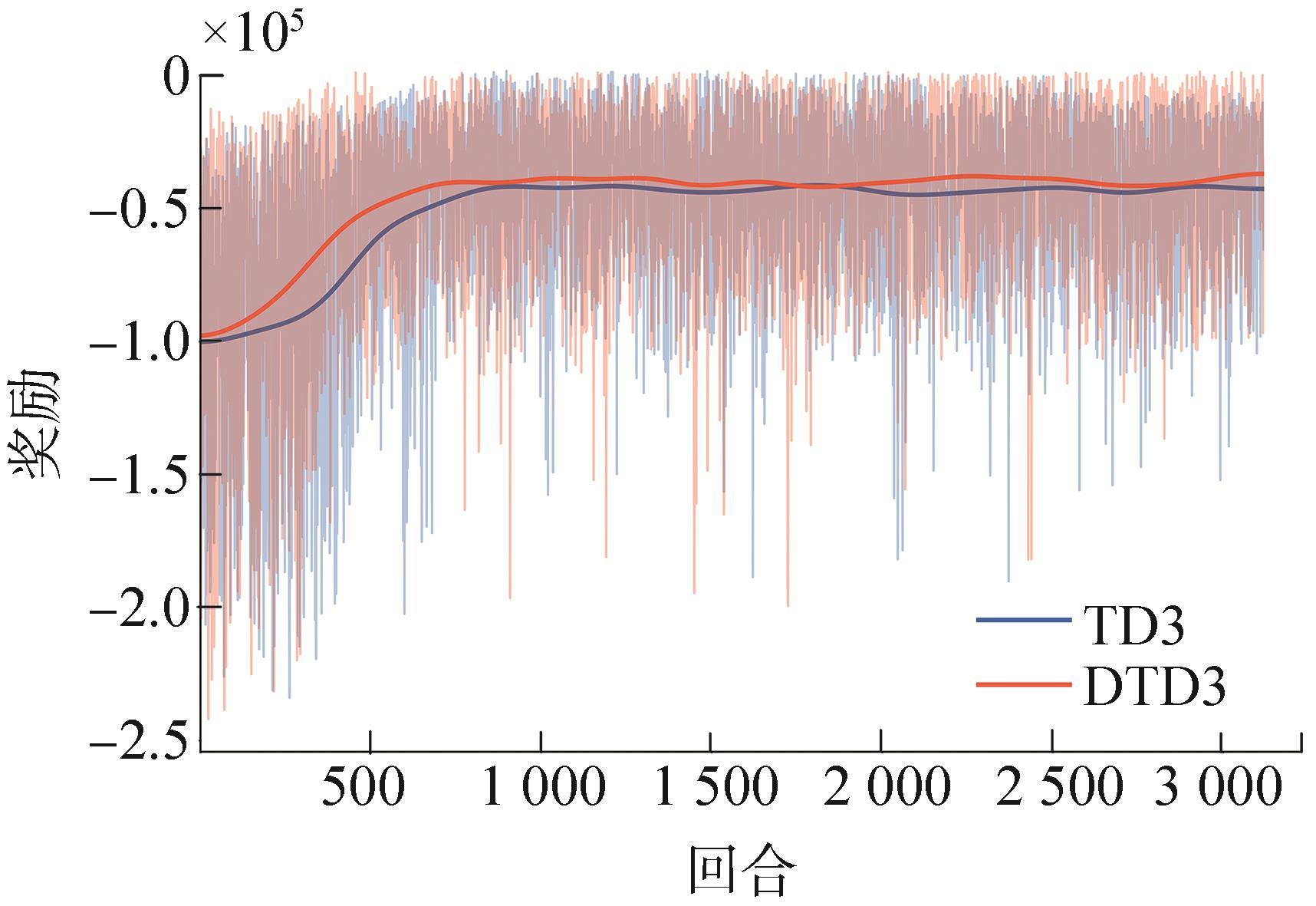
Fig. 15
Episode win rate under strong ocean current
Table 9
Comparison results of test set for strong ocean current algorithm
| 算法 | 占位坐标/m | 占位时间/s | 实际坐标/m | 实际时间/s | 平均坐标误差/m | 平均时间误差/s |
|---|---|---|---|---|---|---|
| DTD3 | (-21.02, 28.35) | 17.6 | (-16.23, 27.27) | 20.8 | 5.62 | 3.6 |
| (-49.37, 64.14) | 40.5 | (-44.96, 62.07) | 44.3 | |||
| (-36.33, 58.32) | 34.4 | (-32.53, 52.36) | 38.5 | |||
| TD3 | (-23.00, 34.61) | 20.7 | (-13.19, 20.21) | 24.9 | 11.08 | 4.1 |
| (-57.24, 80.49) | 49.3 | (-55.25, 73.94) | 53.5 | |||
| (-36.36, 50.96) | 31.2 | (-29.20, 45.51) | 35.4 |
| [1] | 潘云伟, 李敏, 曾祥光, 等. 基于人工势场和改进强化学习的自主式水下潜航器避障和航迹规划[J]. 兵工学报, 2025, 46(4): 70-81. |
| Pan Yunwei, Li Min, Zeng Xiangguang, et al. AUV Obstacle Avoidance and Path Planning Based on Artificial Potential Field and Improved Reinforcement Learning[J]. Acta Armamentarii, 2025, 46(4): 70-81. | |
| [2] | 任勇, 王景璟, 杜军, 等. 自主潜航器关键技术及应用[M]. 北京: 人民邮电出版社, 2021. |
| Ren Yong, Wang Jingjing, Du Jun, et al. Key Technologies and Applications of Autonomous Underwater Vehicles[M]. Beijing: Posts & Telecom Press, 2021. | |
| [3] | 童心赤. 水下航行器攻击占位研究[D]. 武汉: 武汉理工大学, 2021. |
| Tong Xinchi. Research on Occupying Attack Position of Unmanned Underwater Vehicle[D]. Wuhan: Wuhan University of Technology, 2021. | |
| [4] | 夏佩伦. 潜艇鱼雷攻击占位机动方案的确定与分析[J]. 火力与指挥控制, 2013, 38(11): 114-117. |
| Xia Peilun. Determination and Analysis of Getting-to-the-firing-position Maneuver Scheme for Submarine Attacking with Torpedo[J]. Fire Control & Command Control, 2013, 38(11): 114-117. | |
| [5] | 温洪, 魏石川, 陈志鹏, 等. 鱼雷攻击占位相关参数计算[J]. 指挥控制与仿真, 2008, 30(3): 58-60. |
| Wen Hong, Wei Shichuan, Chen Zhipeng, et al. Calculation on Relative Parameter of Favored Submarine Position for Torpedo Attack[J]. Command Control & Simulation, 2008, 30(3): 58-60. | |
| [6] | 吴志泉, 吴自飞, 李世雄. 基于局部放大法的舰船占领阵位求解方法[J]. 船舶工程, 2023, 45(增1): 389-392. |
| Wu Zhiquan, Wu Zifei, Li Shixiong. Solution Method of Occupying Ship Position Based on Partial Enlargement[J]. Ship Engineering, 2023, 45(S1): 389-392. | |
| [7] | 王钊, 王宏健, 张宏瀚, 等. UUV攻防博弈的自适应攻击占位机动决策研究[J]. 控制与决策, 2024, 39(11): 3819-3828. |
| Wang Zhao, Wang Hongjian, Zhang Honghan, et al. Adaptive Attack Occupancy Maneuver Decision of UUV Attack-defense Game[J]. Control and Decision, 2024, 39(11): 3819-3828. | |
| [8] | 宋保维, 姜军, 王鹏, 等. 基于Markov过程的潜艇占位能力模型研究[J]. 鱼雷技术, 2007, 15(4): 45-48. |
| Song Baowei, Jiang Jun, Wang Peng, et al. Modelling Taking-up Position Capability of Submarine Based on Markov Chain[J]. Torpedo Technology, 2007, 15(4): 45-48. | |
| [9] | Tong Xinchi, Zhang Huajun, Guo Hang. Research on Occupancy Maneuvering Scheme of Unmanned Underwater Vehicle[C]//2020 Chinese Control and Decision Conference (CCDC). Piscataway: IEEE, 2020: 3478-3483. |
| [10] | Safari Farhad, Rafeeyan Mansour, Danesh Mohammad. Estimation of Hydrodynamic Coefficients and Simplification of the Depth Model of an AUV Using CFD and Sensitivity Analysis[J]. Ocean Engineering, 2022, 263: 112369. |
| [11] | 高婷, 庞永杰, 王亚兴, 等. 水下航行器水动力系数计算方法[J]. 哈尔滨工程大学学报, 2019, 40(1): 174-180. |
| Gao Ting, Pang Yongjie, Wang Yaxing, et al. Calculation Method of Hydrodynamic Coefficients for Underwater Vehicles[J]. Journal of Harbin Engineering University, 2019, 40(1): 174-180. | |
| [12] | Wang Xu, Wang Sen, Liang Xingxing, et al. Deep Reinforcement Learning: A Survey[J]. IEEE Transactions on Neural Networks and Learning Systems, 2024, 35(4): 5064-5078. |
| [13] | Tai Lei, Paolo Giuseppe, Liu Ming. Virtual-to-real Deep Reinforcement Learning: Continuous Control of Mobile Robots for Mapless Navigation[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2017: 31-36. |
| [14] | Zhelo Oleksii, Zhang Jingwei, Tai Lei, et al. Curiosity-driven Exploration for Mapless Navigation with Deep Reinforcement Learning[EB/OL]. (2018-05-14) [2025-07-06]. . |
| [15] | Fujimoto Scott, Hoof Herke, Meger David. Addressing Function Approximation Error in Actor-critic Methods[C]//Proceedings of the 35th International Conference on Machine Learning. Chia Laguna Resort: PMLR, 2018: 1587-1596. |
| [16] | Dabney W, Ostrovski G, Silver D, et al. Implicit Quantile Networks for Distributional Reinforcement Learning[C]//Proceedings of the 35th International Conference on Machine Learning. Chia Laguna Resort: PMLR, 2018: 1096-1105. |
| [17] | Bellemare M G, Dabney W, Munos Rémi. A Distributional Perspective on Reinforcement Learning[C]//Proceedings of the 34th International Conference on Machine Learning. Chia Laguna Resort: PMLR, 2017: 449-458. |
| [18] | Dabney W, Rowland M, Bellemare M G, et al. Distributional Reinforcement Learning with Quantile Regression[C]//Proceedings of the Thirty-Second AAAI Conference on Artificial Intelligence and Thirtieth Innovative Applications of Artificial Intelligence Conference and Eighth AAAI Symposium on Educational Advances in Artificial Intelligence. Palo Alto: AAAI Press, 2018: 2892-2901. |
| [19] | Mavrin Borislav, Yao Hengshuai, Kong Linglong, et al. Distributional Reinforcement Learning for Efficient Exploration[C]//Proceedings of the 36th International Conference on Machine Learning. Chia Laguna Resort: PMLR, 2019: 4424-4434. |
| [20] | 刘开周, 赵洋. 水下机器人建模与仿真技术[M]. 北京: 科学出版社, 2020. |
| Liu Kaizhou, Zhao Yang. Modeling and Simulation Technology for Underwater Vehicle[M]. Beijing: Science Press, 2020. | |
| [21] | Ahmed Faheem, Xiang Xianbo, Zhou Guangzhao, et al. Dynamic Modeling and Maneuvering of Remus 100 AUV: The Impact of Added Mass Coefficients[C]//2023 42nd Chinese Control Conference (CCC). Piscataway: IEEE, 2023: 1424-1429. |
| [22] | Hong Lin, Fang Renjie, Cai Xiaotian, et al. Numerical Investigation on Hydrodynamic Performance of a Portable AUV[J]. Journal of Marine Science and Engineering, 2021, 9(8): 812. |
| [1] | Chen Jitong, Zhou Jiajia, Wu Di, Jiang Hailong. A USV Path Planning Algorithm under Special Environment Based on TD3-RRT [J]. Journal of System Simulation, 2025, 37(11): 2888-2903. |
| [2] | Qi Bensheng, Li Yan, Miao Hongxia, Chen Jialin, Li Chenglin. Research on Path Planning Method for Autonomous Underwater Vehicles Based on Improved Informed RRT [J]. Journal of System Simulation, 2025, 37(1): 245-256. |
| [3] | Kuang Xinghong, Huang Aowei. A Method Based on Deep Learning for Assisting SINS/DVL Integrated Navigation [J]. Journal of System Simulation, 2024, 36(8): 1810-1822. |
| [4] | Yuchao Zhang, Yuan Jiang, Jiyang Dai. Dynamic Obstacle Avoidance Control of Three-order Multi-robot Cooperative Formation [J]. Journal of System Simulation, 2022, 34(8): 1762-1774. |
| [5] | Gan Wenyang, Zhu Daqi. Complete Coverage Belief Function Path Planning Algorithm of Autonomous Underwater VehicleBased on Behavior Strategy [J]. Journal of System Simulation, 2018, 30(5): 1857-1868. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
