

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (12): 2967-2980.doi: 10.16182/j.issn1004731x.joss.25-0351
• Special Column:Intelligent robust scheduling optimization for complex systems • Next Articles
Bai Zhenzu, Hou Yizhi, He Zhangming, Wei Juhui, Zhou Haiyin, Wang Jiongqi
Received:2025-04-26
Revised:2025-07-21
Online:2025-12-26
Published:2025-12-24
Contact:
Wang Jiongqi
CLC Number:
Bai Zhenzu, Hou Yizhi, He Zhangming, Wei Juhui, Zhou Haiyin, Wang Jiongqi. Optimization of Dynamic Weapon Target Assignment Considering Random Disturbances[J]. Journal of System Simulation, 2025, 37(12): 2967-2980.
Table 1
HV results of multi-operator strategy
| 实例 | CDEA-ARSBX | CDEA-DE | CDEA-GA | CDEA-GAhalf | CDEA-DQN |
|---|---|---|---|---|---|
| +/–/= | 0/2/7 | 1/6/2 | 0/6/3 | 0/6/3 | |
| CF1 | 0.562 (2.7×10-4) - | 0.561 (1.1×10-3) - | 0.560 (1.1×10-3) - | 0.563 (8.2×10-4) | |
| CF2 | 0.665 (1.2×10-2) = | 0.667 (5.3×10-3) - | 0.618 (2.7×10-2) - | 0.6.16 (2.3×10-2) - | |
| CF3 | 0.219 (5.4×10-2) = | 0.106 (4.7×10-2) - | 0.189 (3.8×10-2) - | 0.1.83 (3.7×10-2) - | |
| CF4 | 0.458 (1.8×10-2) / - | 0.451 (1.4×10-2) - | 0.417 (3.0×10-2) - | 0.402 (6.1×10-2) - | |
| CF5 | 0.257 (7.6×10-2) - | 0.285 (6.7×10-2) = | 0.269 (6.7×10-2) = | 0.304 (7.3×10-2) | |
| CF6 | 0.662 (8.9×10-3) = | 0.644 (1.5×10-2) - | 0.641 (1.7×10-2) - | 0.663 (9.5×10-3) | |
| CF7 | 0.437 (1.0×10-1) = | 0.426 (9.6×10-2) = | 0.4.09 (9.5×10-2) - | 0.423 (6.8×10-2) - | |
| CF8 | 0.229 (9.3×10-2) = | 0.053 (3.7×10-2) - | 0.279 (9.7×10-2) = | 0.276 (8.5×10-2) | |
| CF9 | 0.227 (6.8×10-2) - | 0.388 (5.7×10-2) = | 0.383 (5.9×10-2) = | 0.403 (3.7×10-2) |

Fig. 1
Effectiveness of the multi-operator selection based on DQN
Table 2
HV results with existed algorithms
| 实例 | BiCo | MTCMO | C3M | CDEA-DQN |
|---|---|---|---|---|
| +/–/= | 4/17/2 | 5/13/5 | 0/21/2 | |
| CF1 | 0.537 (1.84×10-2) - | 0.548 (3.79×10-3) - | 0.547 (3.90×10-3) - | 0.564 (4.72×10-4) |
| CF2 | 0.603 (3.59×10-2) - | 0.615 (2.47×10-2) - | 0.641 (1.83×10-2) - | 0.666 (9.75×10-3) |
| CF3 | 0.1.88 (4.72×10-2) - | 0.157 (4.48×10-2) - | 0.169 (4.01×10-2) - | 0.233 (5.18×10-2) |
| CF4 | 0.411 (3.64×10-2) - | 0.388 (8.39×10-2) - | 0.444 (2.57×10-2) - | 0.466 (9.82×10-3) |
| CF5 | 0.254 (8.13×10-2) - | 0.279 (6.82×10-2) - | 0.197 (6.98×10-2) - | 0.319 (7.17×10-2) |
| CF6 | 0.628 (1.95×10-2) - | 0.642 (1.64×10-2) - | 0.659 (6.92×10-3) = | 0.663 (8.23×10-3) |
| CF7 | 0.424 (8.45×10-2) - | 0.414 (1.34×10-1) = | 0.449 (1.21×10-1) = | 0.478 (6.54×10-2) |
| CF8 | 0.297 (5.70×10-2) = | 0.250 (7.32×10-2) - | 0.195 (5.10×10-2) - | 0.299 (7.59×10-2) |
| CF9 | 0.408 (3.20×10-2) = | 0.422 (1.58×10-2) + | 0.355 (2.91×10-2) - | 0.408 (2.56×10-2) |
| MW1 | 0.438 (4.88×10-2) - | 0.467 (2.52×10-2) - | 0.149 (5.99×10-2) - | 0.487 (7.85×10-4) |
| MW2 | 0.562 (1.23×10-2) + | 0.549 (1.11×10-2) + | 0.415 (6.83×10-2) - | 0.535 (3.15×10-2) |
| MW3 | 0.535 (3.59×10-3) - | 0.540 (1.88×10-3) = | 0.538 (1.47×10-3) - | 0.541 (6.03×10-4) |
| MW4 | 0.831 (4.87×10-3) + | 0.831 (1.91×10-2) + | 0.403 (2.87×10-1) - | 0.824 (3.57×10-3) |
| MW5 | 0.310 (1.05×10-2) - | 0.295 (6.28×10-2) = | 0.086 (5.03×10-2) - | 0.317 (3.28×10-3) |
| MW6 | 0.318 (1.00×10-2) + | 0.304 (2.23×10-2) + | 0.101 (5.96×10-2) - | 0.255 (4.71×10-2) |
| MW7 | 0.405 (2.20×10-3) - | 0.408 (1.24×10-3) - | 0.408 (7.98×10-4) - | 0.411 (3.33×10-4) |
| MW8 | 0.478 (5.22×10-2) - | 0.531 (1.31×10-2) - | 0.314 (1.18×10-1) - | 0.544 (6.85×10-3) |
| MW9 | 0.344 (6.65×10-2) - | 0.348 (1.04×10-1) - | 0.103 (1.61×10-1) - | 0.382 (2.13×10-2) |
| MW10 | 0.290 (1.19×10-1) - | 0.408 (4.03×10-2) = | 0.259 (7.00×10-2) - | 0.415 (2.38×10-2) |
| MW11 | 0.416 (6.62×10-2) - | 0.412 (4.49×10-2) - | 0.443 (9.49×10-4) - | 0.446 (8.12×10-4) |
| MW12 | 0.526 (1.32×10-1) - | 0.533 (1.84×10-1) - | 0.015 (3.68×10-2) - | 0.599 (2.27×10-2) |
| MW13 | 0.445 (2.55×10-2) + | 0.442 (2.04×10-2) + | 0.308 (7.38×10-2) - | 0.417 (3.12×10-2) |
| MW14 | 0.280 (8.11×10-2) - | 0.429 (5.55×10-2) = | 0.198 (6.14×10-2) - | 0.459 (4.44×10-3) |
Fig. 2
Outcome and time consumption of assignment under small scale scenario
Fig. 3
Outcome and time consumption of assignment under medium scale scenario
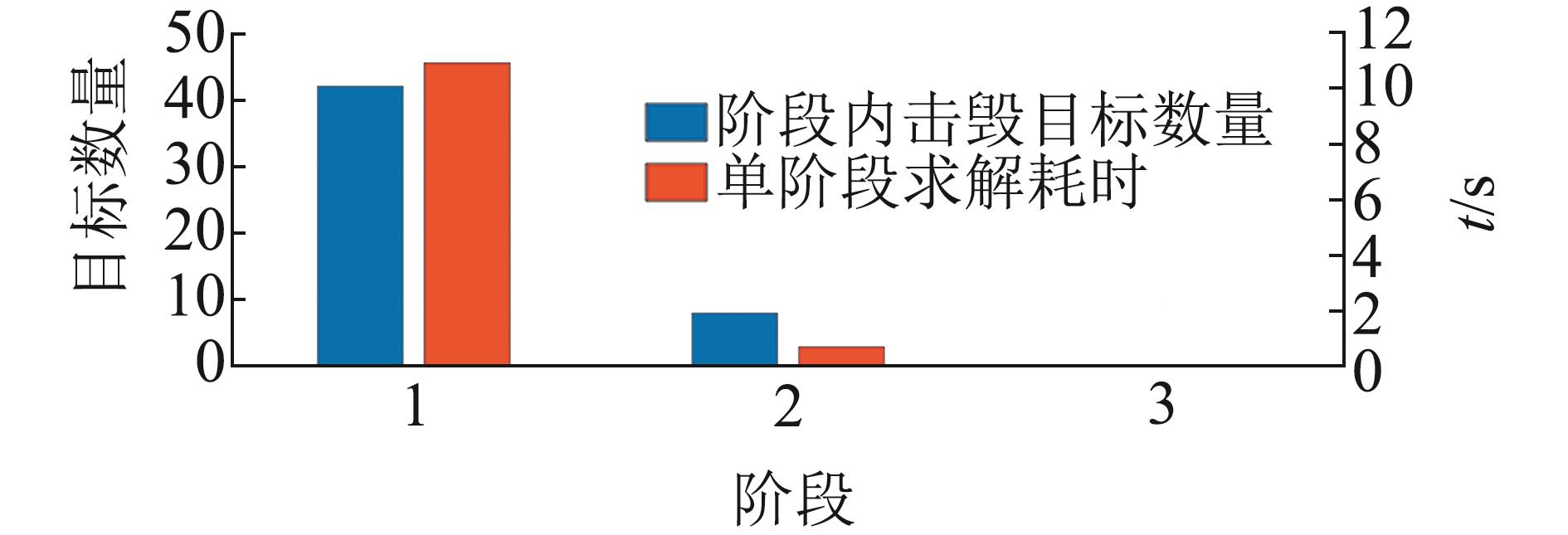

Fig. 4
Outcome and time consumption of assignment under large scale scenario
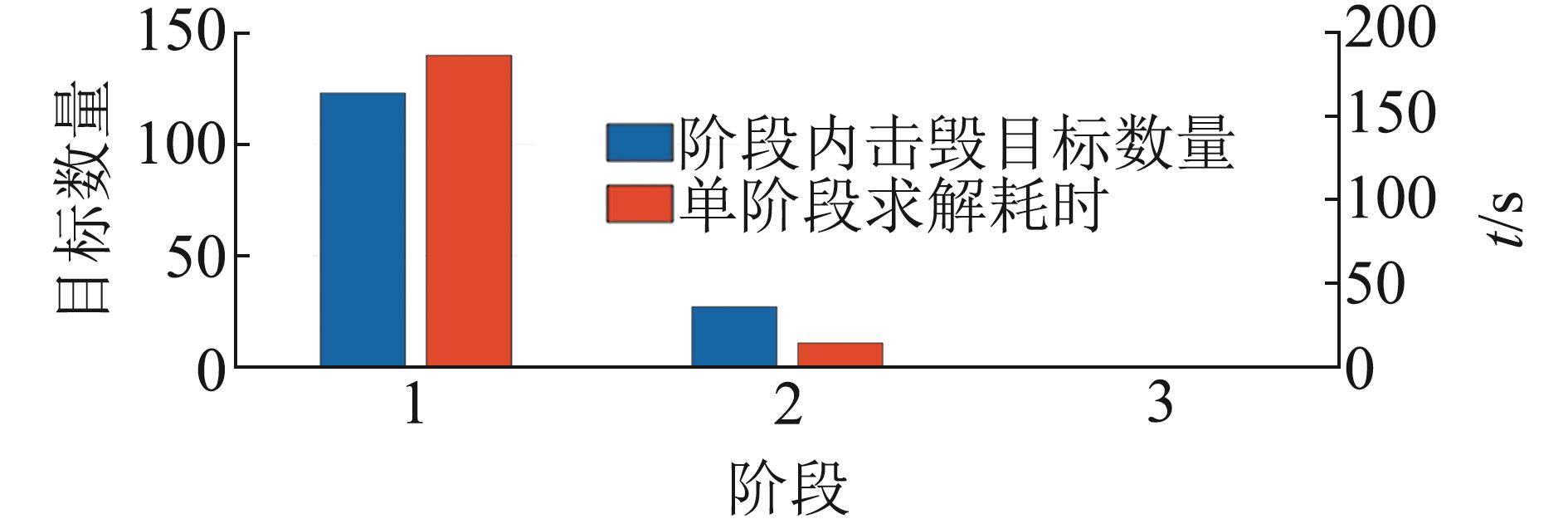
Table 3
Stages needed to intercept all targets under different sensor platform failure probabilities
| 不同扰动 | Sp /Wp /T | ||
|---|---|---|---|
| 均势 | 20/10/10 | 20/50/50 | 20/100/100 |
| 0~10% | 2±0 | 2±0 | 2±0 |
| 10%~20% | 2±0 | 2±0 | 2±0 |
| 20%~30% | 2±0 | 2±0 | 2±0 |
| 30%~40% | 2±0 | 2±0 | 2±0 |
| 40%~50% | 1.95±0.22 | 2±0 | 2±0 |
| 50%~60% | 2±0 | 2±0 | 2±0 |
| 60%~70% | 2±0 | 2±0 | 2±0 |
| 优势 | 20/20/10 | 20/75/50 | 20/150/100 |
| 0~10% | 1±0 | 1±0 | 2±0 |
| 10%-~20% | 1±0 | 1±0 | 2±0 |
| 20%~30% | 1±0 | 1±0 | 2±0 |
| 30%~40% | 1±0 | 2±0 | 2±0 |
| 40%~50% | 1±0 | 1±0 | 2±0 |
| 50%~60% | 1±0 | 1.4±0.55 | 1.8±0.67 |
| 60%~70% | 1±0 | 2±0 | 2±0 |
| 劣势 | 20/10/20 | 20/50/75 | 20/100/150 |
| 0~10% | 5±0 | 3±0 | 3±0 |
| 10%~20% | 4.2±0.91 | 3±0 | 3±0 |
| 20%~30% | // | 3±0 | 3±0 |
| 30%~40% | // | 3±0 | 3±0 |
| 40%~50% | // | 3±0 | 3.8±0.57 |
| 50%~60% | // | // | // |
| 60%~70% | // | // | // |
Table 4
Stages needed to intercept all targets under different sensor platform failure probabilities
| 不同扰动 | Sp /Wp /T | ||
|---|---|---|---|
| 均势 | 20/10/10 | 20/50/50 | 20/100/100 |
| 0~10% | 2±0 | 2±0 | 2±0 |
| 10%~20% | 2±0 | 2±0 | 2±0 |
| 20%~30% | 2±0 | 2±0 | 2±0 |
| 30%~40% | 2±0 | 2±0 | 2±0 |
| 40%~50% | 2±0 | 2±0 | 2±0 |
| 50%~60% | 2±0 | 2±0 | 2±0 |
| 60%~70% | 2±0 | 2±0 | 2±0 |
| 优势 | 20/20/10 | 20/75/50 | 20/150/100 |
| 0%~10% | 1±0 | 1±0 | 1.67±0.58 |
| 10%-~20% | 1±0 | 1.4±0.57 | 2±0 |
| 20%~30% | 1±0 | 1.8±0.45 | 2±0 |
| 30%~40% | 1±0 | 2±0 | 2±0 |
| 40%~50% | 1±0 | 2±0 | 2±0 |
| 50%~60% | 1±0 | 1.8±0.45 | 2±0 |
| 60%~70% | 1±0 | 2±0 | 2±0 |
| 劣势 | 20/10/20 | 20/50/75 | 20/100/150 |
| 0~10% | 4±0 | 2.9±0.33 | 2±0 |
| 10%~20% | 3.8±0.48 | 3±0 | 2±0 |
| 20%~30% | 4±0 | 3±0 | 2±0 |
| 30%~40% | 3.8±0.45 | 3±0 | 3±0 |
| 40%~50% | 4±0 | 3±0 | 3±0 |
| 50%~60% | 5±0 | 3±0 | 3±0 |
| 60%~70% | 5.8±0.45 | 3±0 | 3.67±0.58 |
Table 5
Stages needed to intercept all targets under different ratios of new target scale
| 不同扰动 | Sp /Wp /T | ||
|---|---|---|---|
| 均势 | 20/10/10 | 20/50/50 | 20/100/100 |
| 0~5% | 1.67±0.58 | // | // |
| 5%~10% | 6±0 | // | // |
| 10%~15% | // | // | // |
| 优势 | 20/20/10 | 20/75/50 | 20/150/100 |
| 0~5% | 1±0 | // | // |
| 5%~10% | 1±0 | // | // |
| 10%~15% | // | // | // |
| 劣势 | 20/10/20 | 20/50/75 | 20/100/150 |
| 0~5% | 3±0 | // | // |
| 5%~10% | // | // | // |
| 10%~15% | // | // | // |
| [1] | 刘大勇, 郭齐胜, 董志明, 等. AI4S驱动的战术博弈对抗仿真体系及应用框架研究[J/OL]. 系统仿真学报. (2025-04-18) [2025-07-21]. . |
| Liu Dayong, Guo Qisheng, Dong Zhiming, et al. Research of the System and Application Framework of Tactical Game Simulation Driven by AI 4S[J/OL]. Journal of System Simulation. (2025-04-18) [2025-07-21]. . | |
| [2] | 彭雅兰, 段海滨, 张岱峰, 等. 仿灰狼合作捕食行为的无人机集群动态任务分配[J]. 控制理论与应用, 2021, 38(11): 1855-1862. |
| Peng Yalan, Duan Haibin, Zhang Daifeng, et al. Unmanned Aerial Vehicle Swarm Dynamic Mission Planning Inspired by Cooperative Predation of Wolf-pack[J]. Control Theory & Applications, 2021, 38(11): 1855-1862. | |
| [3] | Kline A, Ahner D, Hill R. The Weapon-target Assignment Problem[J]. Computers & Operations Research, 2019, 105: 226-236. |
| [4] | Li Jinrui, Wu Guohua, Wang Ling. A Comprehensive Survey of Weapon Target Assignment Problem: Model, Algorithm, and Application[J]. Engineering Applications of Artificial Intelligence, 2024, 137, Part B: 109212. |
| [5] | 李梦杰, 常雪凝, 石建迈, 等. 武器目标分配问题研究进展:模型、算法与应用[J]. 系统工程与电子技术, 2023, 45(4): 1049-1071. |
| Li Mengjie, Chang Xuening, Shi Jianmai, et al. Developments of Weapon Target Assignment: Models, Algorithms, and Applications[J]. Systems Engineering and Electronics, 2023, 45(4): 1049-1071. | |
| [6] | 王艺鹏, 辛斌, 陈杰. 多阶段传感器-武器-目标分配问题的建模与优化求解[J]. 控制理论与应用, 2019, 36(11): 1886-1895. |
| Wang Yipeng, Xin Bin, Chen Jie. Modeling and Optimization of Multi-stage Sensor-weapon-target Assignment[J]. Control Theory & Applications, 2019, 36(11): 1886-1895. | |
| [7] | Xin Bin, Wang Yipeng, Chen Jie. An Efficient Marginal-return-based Constructive Heuristic to Solve the Sensor-weapon-target Assignment Problem[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(12): 2536-2547. |
| [8] | Wang Yipeng, Xin Bin, Chen Jie. An Adaptive Memetic Algorithm for the Joint Allocation of Heterogeneous Stochastic Resources[J]. IEEE Transactions on Cybernetics, 2022, 52(11): 11526-11538. |
| [9] | 王晴, 王雨珏, 王浩然, 等. 融合深度强化学习与图神经网络的动态武器目标分配优化[J/OL]. 控制理论与应用. (2025-07-17) [2025-07-29]. . |
| Wang Qing, Wang Yujue, Wang Haoran, et al. Dynamic Weapon-target Assignment Optimization Integrating Deep Reinforcement Learning and Graph Neural Networks[J/OL]. Control Theory & Applications. (2025-07-17) [2025-07-29]. . | |
| [10] | Liang Jing, Ban Xuanxuan, Yu Kunjie, et al. A Survey on Evolutionary Constrained Multiobjective Optimization[J]. IEEE Transactions on Evolutionary Computation, 2023, 27(2): 201-221. |
| [11] | Li Yingwei, Feng Xiang, Yu Huiqun. A Constrained Multiobjective Evolutionary Algorithm with the Two-archive Weak Cooperation[J]. Information Sciences, 2022, 615: 415-430. |
| [12] | Bai Zhenzu, Zhou Haiyin, Shi Jianmai, et al. A Hybrid Multi-objective Evolutionary Algorithm with High Solving Efficiency for UAV Defense Programming[J]. Swarm and Evolutionary Computation, 2024, 87: 101572. |
| [13] | Xu Liang, Cao Xianbin, Du Wenbo, et al. Cooperative Path Planning Optimization for Multiple UAVs with Communication Constraints[J]. Knowledge-Based Systems, 2023, 260: 110164. |
| [14] | Ma Zhongwei, Wang Yong, Song Wu. A New Fitness Function with Two Rankings for Evolutionary Constrained Multiobjective Optimization[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(8): 5005-5016. |
| [15] | Sri Srinivasa Raju M, Dutta Saykat, Mallipeddi Rammohan, et al. A Dual-population and Multi-stage Based Constrained Multi-objective Evolutionary[J]. Information Sciences, 2022, 615: 557-577. |
| [16] | Tian Ye, Zhang Tao, Xiao Jianhua, et al. A Coevolutionary Framework for Constrained Multiobjective Optimization Problems[J]. IEEE Transactions on Evolutionary Computation, 2021, 25(1): 102-116. |
| [17] | Zuo Mingcheng, Gong Dunwei, Wang Yan, et al. Process Knowledge-guided Autonomous Evolutionary Optimization for Constrained Multiobjective Problems[J]. IEEE Transactions on Evolutionary Computation, 2024, 28(1): 193-207. |
| [18] | Xu Bin, Duan Wei, Zhang Haifeng, et al. Differential Evolution with Infeasible-guiding Mutation Operators for Constrained Multi-objective Optimization[J]. Applied Intelligence, 2020, 50(12): 4459-4481. |
| [19] | Liu Yijun, Li Xin, Hao Qijia. A New Constrained Multi-objective Optimization Problems Algorithm Based on Group-sorting[C]//Proceedings of the Genetic and Evolutionary Computation Conference Companion. New York: ACM, 2019: 221-222. |
| [20] | Qian Feng, Xu Bin, Qi Rongbin, et al. Self-adaptive Differential Evolution Algorithm with Α-constrained-domination Principle for Constrained Multi-objective Optimization[J]. Soft Computing, 2012, 16(8): 1353-1372. |
| [21] | Tian Ye, Li Xiaopeng, Ma Haiping, et al. Deep Reinforcement Learning Based Adaptive Operator Selection for Evolutionary Multi-objective Optimization[J]. IEEE Transactions on Emerging Topics in Computational Intelligence, 2023, 7(4): 1051-1064. |
| [22] | Deb Kalyanmoy, Sindhya Karthik, Okabe Tatsuya. Self-adaptive Simulated Binary Crossover for Real-parameter Optimization[C]//Proceedings of the 9th annual conference on Genetic and evolutionary computation. New York: ACM, 2007: 1187-1194. |
| [23] | Storn R, Price K. Differential Evolution—A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces [J] Journal of Global Optimizatio, 1997, 11: 341-359. |
| [24] | Kukkonen S, Deb K. Improved Pruning of Non-dominated Solutions Based on Crowding Distance for Bi-objective Optimization Problems[C]//2006 IEEE International Conference on Evolutionary Computation. Piscataway: IEEE, 2006: 1179-1186. |
| [25] | Pan Linqiang, Xu Wenting, Li Lianghao, et al. Adaptive Simulated Binary Crossover for Rotated Multi-objective Optimization[J]. Swarm and Evolutionary Computation, 2021, 60: 100759. |
| [26] | A Coello Coello Carlos, Nareli Cruz Cortés. Solving Multiobjective Optimization Problems Using an Artificial Immune System[J]. Genetic Programming and Evolvable Machines, 2005, 6(2): 163-190. |
| [27] | Wang Handing, Jin Yaochu, Yao Xin. Diversity Assessment in Many-objective Optimization[J]. IEEE Transactions on Cybernetics, 2017, 47(6): 1510-1522. |
| [28] | Sutton R S, Barto A G. Reinforcement Learning: An Introduction[J]. IEEE Transactions on Neural Networks, 1998, 9(5): 1054-1054. |
| [29] | Deb K, Pratap A, Agarwal S, et al. A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II[J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197. |
| [30] | Zhang Xingyi, Tian Ye, Cheng Ran, et al. An Efficient Approach to Nondominated Sorting for Evolutionary Multiobjective Optimization[J]. IEEE Transactions on Evolutionary Computation, 2015, 19(2): 201-213. |
| [31] | Tian Ye, Cheng Ran, Zhang Xingyi, et al. PlatEMO: A MATLAB Platform for Evolutionary Multi-objective Optimization [Educational Forum][J]. IEEE Computational Intelligence Magazine, 2017, 12(4): 73-87. |
| [32] | Zhang Q, Zhou A, Zhao S Z, et al. Multiobjective Optimization Test Instances for the CEC 2009 Special Session and Competition[C]// 2009 IEEE Congress on Evolutionary Computation. Trondheim, Norway: IEEE, 2009: 195-202. |
| [33] | Ma Zhongwei, Wang Yong. Evolutionary Constrained Multiobjective Optimization: Test Suite Construction and Performance Comparisons[J]. IEEE Transactions on Evolutionary Computation, 2019, 23(6): 972-986. |
| [34] | Zitzler E, Thiele L. Multiobjective Evolutionary Algorithms: A Comparative Case Study and the Strength Pareto Approach[J]. IEEE Transactions on Evolutionary Computation, 1999, 3(4): 257-271. |
| [35] | Liu Zhizhong, Wang Bingchuan, Tang Ke. Handling Constrained Multiobjective Optimization Problems via Bidirectional Coevolution[J]. IEEE Transactions on Cybernetics, 2022, 52(10): 10163-10176. |
| [36] | Qiao Kangjia, Yu Kunjie, Qu Boyang, et al. Dynamic Auxiliary Task-based Evolutionary Multitasking for Constrained Multiobjective Optimization[J]. IEEE Transactions on Evolutionary Computation, 2023, 27(3): 642-656. |
| [37] | Sun Ruiqing, Zou Juan, Liu Yuan, et al. A Multistage Algorithm for Solving Multiobjective Optimization Problems with Multiconstraints[J]. IEEE Transactions on Evolutionary Computation, 2023, 27(5): 1207-1219. |
| [38] | Fan Zhun, Li Wenji, Cai Xinye, et al. An Improved Epsilon Constraint-handling Method in MOEA/D for CMOPs with Large Infeasible Regions[J]. Soft Computing, 2019, 23(23): 12491-12510. |
| [1] | Ding Zhengkun, Liu Jiaqi, Xu Junzheng, Xu Yuezhu, Wang Xingmei. Intelligent Air Combat Decision-making Method Based on BiGRU and Priority Dynamic Sampling [J]. Journal of System Simulation, 2026, 38(2): 447-459. |
| [2] | Tao Caixia, Chen Naikun, Gao Fengyang, Zhang Jiangang. Distributed Optimization for Integrated Energy Based on Multi-agent Reinforcement Learning [J]. Journal of System Simulation, 2026, 38(2): 476-487. |
| [3] | Jiang Ming, He Tao. Solving the Vehicle Routing Problem Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(9): 2177-2187. |
| [4] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [5] | Chen Zhen, Wu Zhuoyi, Zhang Lin. Research on Policy Representation in Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(7): 1753-1769. |
| [6] | Wu Guohua, Zeng Jiaheng, Wang Dezhi, Zheng Long, Zou Wei. A Quadrotor Trajectory Tracking Control Method Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(5): 1169-1187. |
| [7] | Zheng Jiayu, Mai Zhuxue, Chen Zheyi. Optimization of Service Caching and Computation Offloading in Digital Twin Cloud-edge Networks [J]. Journal of System Simulation, 2025, 37(11): 2741-2753. |
| [8] | Di Jian, Wan Xue, Jiang Limei. Evolutionary Reinforcement Learning Based on Elite Instruction and Random Search [J]. Journal of System Simulation, 2025, 37(11): 2877-2887. |
| [9] | Xu Zhongkai, Chu Chenyang, Xie Kai, Zhao Ruizhuo, Ke Wenjun. Optimization Dispatch Method for High-proportion Renewable Energy Power Systems Based on SC-PPO [J]. Journal of System Simulation, 2025, 37(10): 2511-2521. |
| [10] | Liang Xiuman, Liu Ziliang, Liu Zhendong. Path Planning of Improved RRT Algorithm Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(10): 2578-2593. |
| [11] | Jiang Jiachen, Jia Zhengxuan, Xu Zhao, Lin Tingyu, Zhao Pengpeng, Ou Yiming. Decision Modeling and Solution Based on Game Adversarial Complex Systems [J]. Journal of System Simulation, 2025, 37(1): 66-78. |
| [12] | Liu Peijin, Fu Xuefeng, Sun Haofeng, He Lin, Liu Shujie. A Highly Robust Target Tracking Algorithm Merging CNN and Transformer [J]. Journal of System Simulation, 2024, 36(8): 1854-1868. |
| [13] | Qin Baoxin, Zhang Yuxiao, Wu Sirui, Cao Weichong, Li Zhan. Intelligent Optimization of Coal Terminal Unloading Scheduling Based on Improved D3QN Algorithm [J]. Journal of System Simulation, 2024, 36(3): 770-781. |
| [14] | Li Ming, Ye Wangzhong, Yan Jiehua. Path Planning of Desert Robot Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2024, 36(12): 2917-2925. |
| [15] | Han Zijin, Qian Mingjun, Wang Xixian, Zhang Kaiyue. Simulation of Cascade Failure in Urban Rail Transit Hypernetworks Based on Hypergraph Theory [J]. Journal of System Simulation, 2024, 36(12): 2960-2970. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
