

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (9): 2335-2351.doi: 10.16182/j.issn1004731x.joss.24-0333
• Papers • Previous Articles Next Articles
Xiao Wei1, Gao Jiabo1,2, Ke Xueliang1
Received:2024-04-02
Revised:2024-05-27
Online:2025-09-18
Published:2025-09-22
CLC Number:
Xiao Wei, Gao Jiabo, Ke Xueliang. Control Strategy for UAV Cluster Formation Rendezvous Based on LDE-MADDPG Algorithm[J]. Journal of System Simulation, 2025, 37(9): 2335-2351.

Fig. 1
Principle of LDE-MADDPG algorithm
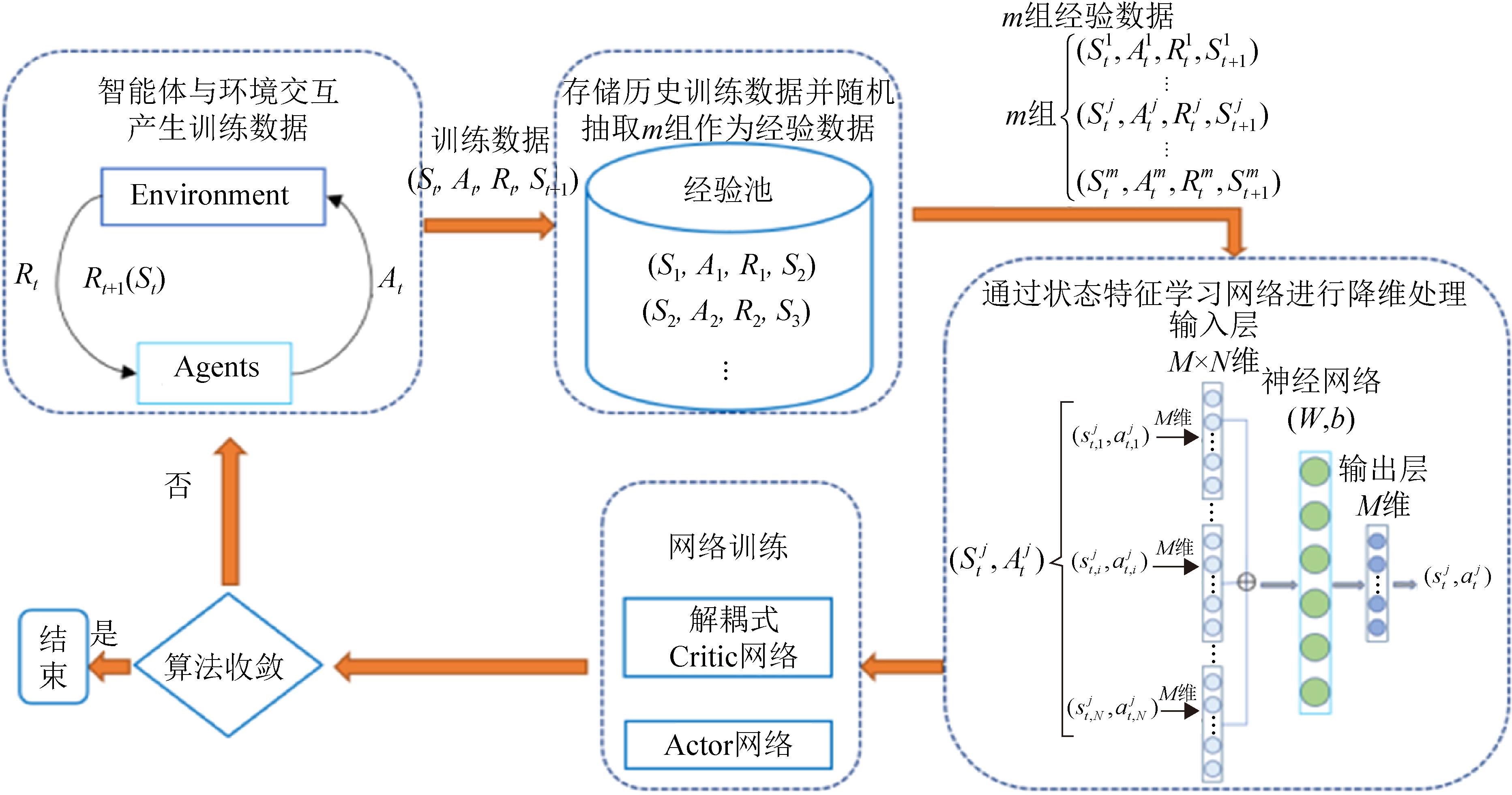
Fig. 2
Network model of state feature learning network
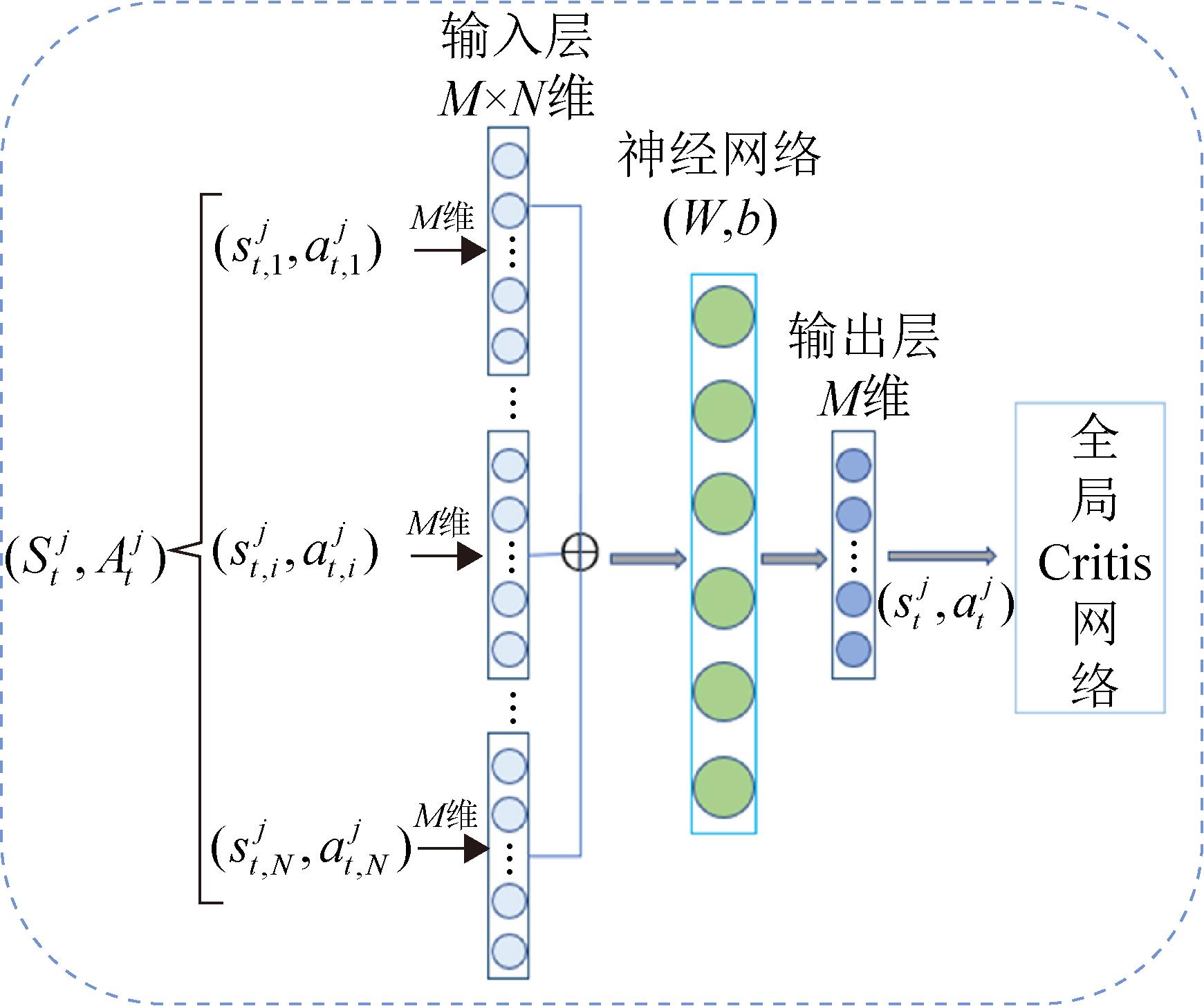
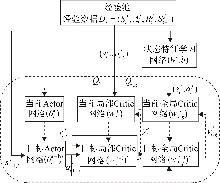
Fig. 3
Decoupled Critic network model
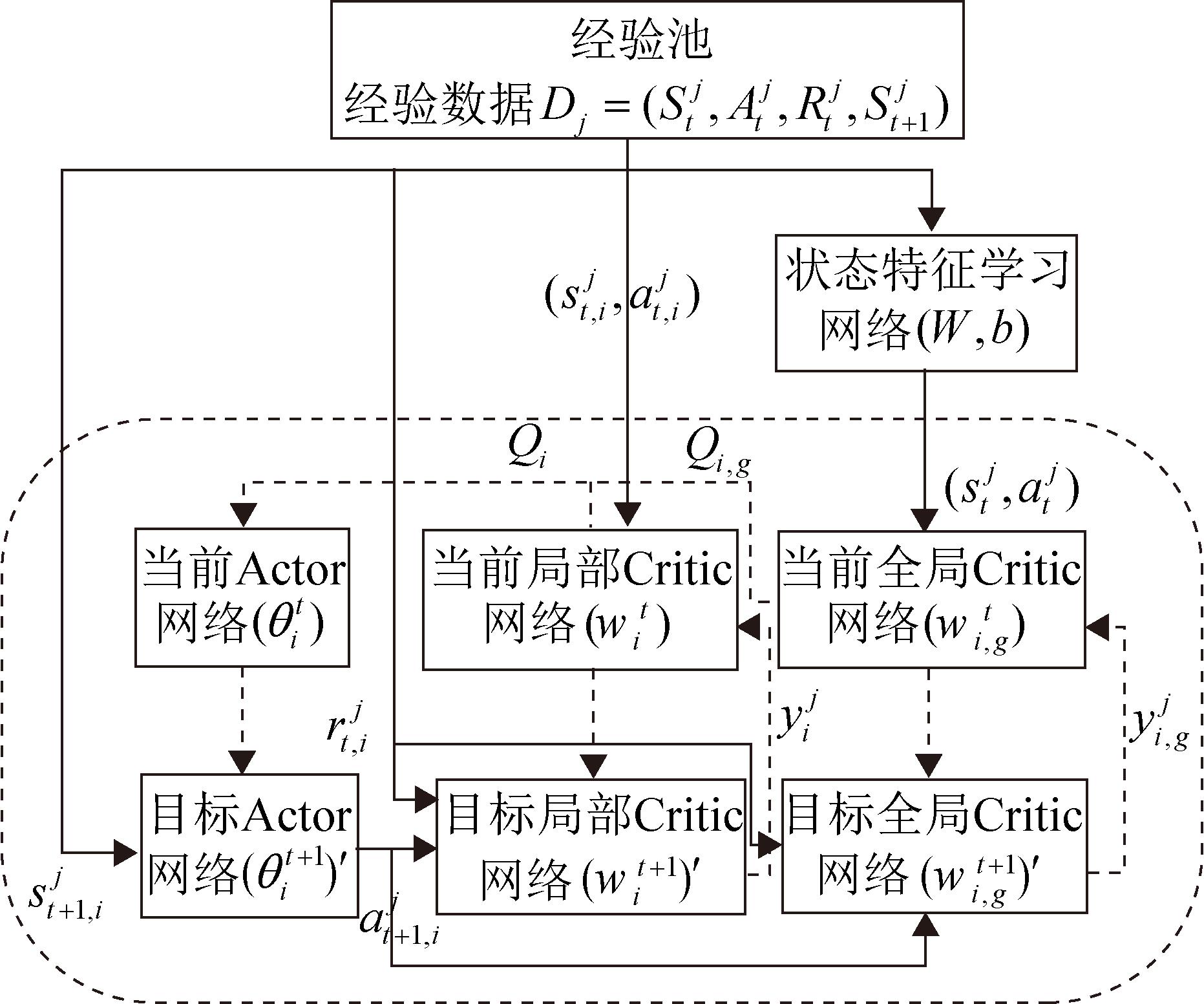
Fig. 4
Strategy generation process of UAV cluster formation rendezvous
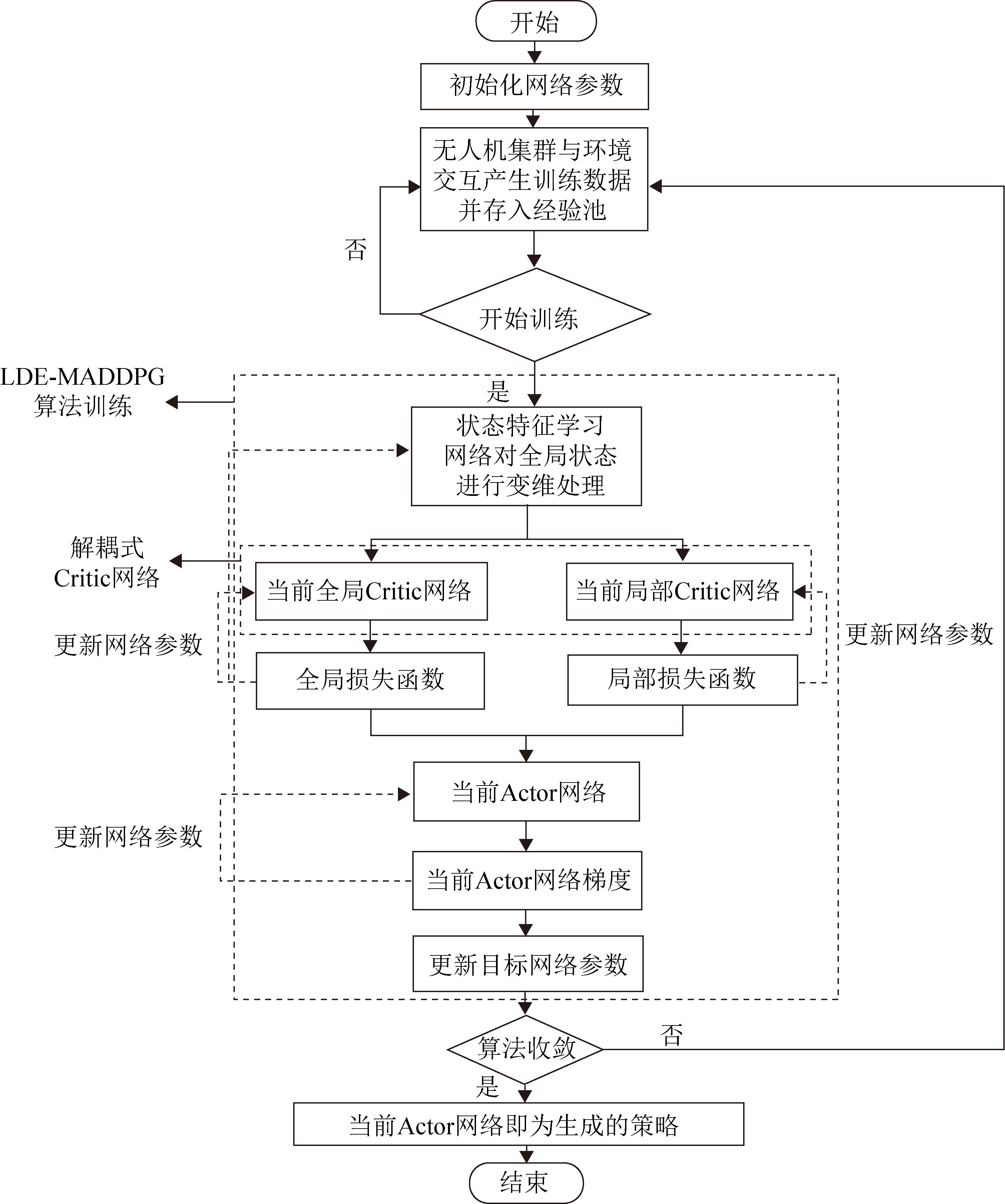
Table 1
Experiment parameters of reinforcement learning environment for UAV cluster formation assembly task
| 实验参数 | 数值 |
|---|---|
| 无人机大小/m | |
| 无人机初始速度 | |
| 无人机最大速度 | |
| 无人机最小安全飞行空间距离 | |
| 任务环境大小 | |
| 任务完成规定时间 | |
| 集结完成时无人机集群与期望集结编队队形允许的最大距离误差 |
Table 2
Training hyperparameters
| 超参数 | 数值 | 意义 |
|---|---|---|
| MaxEpisode | 150 | 训练局数 |
| MaxStep | 300 | 每局总的时间步数 |
| 0.000 1 | Actor网络学习率 | |
| 0.001 | 全局Critic网络学习率 | |
| 0.001 | 局部Critic网络学习率 | |
| 0.95 | 累计奖励折扣因子 | |
| Buffer-size | 500 000 | 经验池中能够存放的样本容量 |
| Batch-size | 128 | 每次训练网络模型的一小批量样本数 |
| 0.01 | 目标网络参数软更新频率 | |
| 0.3,0.3,0.1,0.3 | 奖励函数调节系数 |

Fig. 5
Drone clusters are expected to assemble in formation
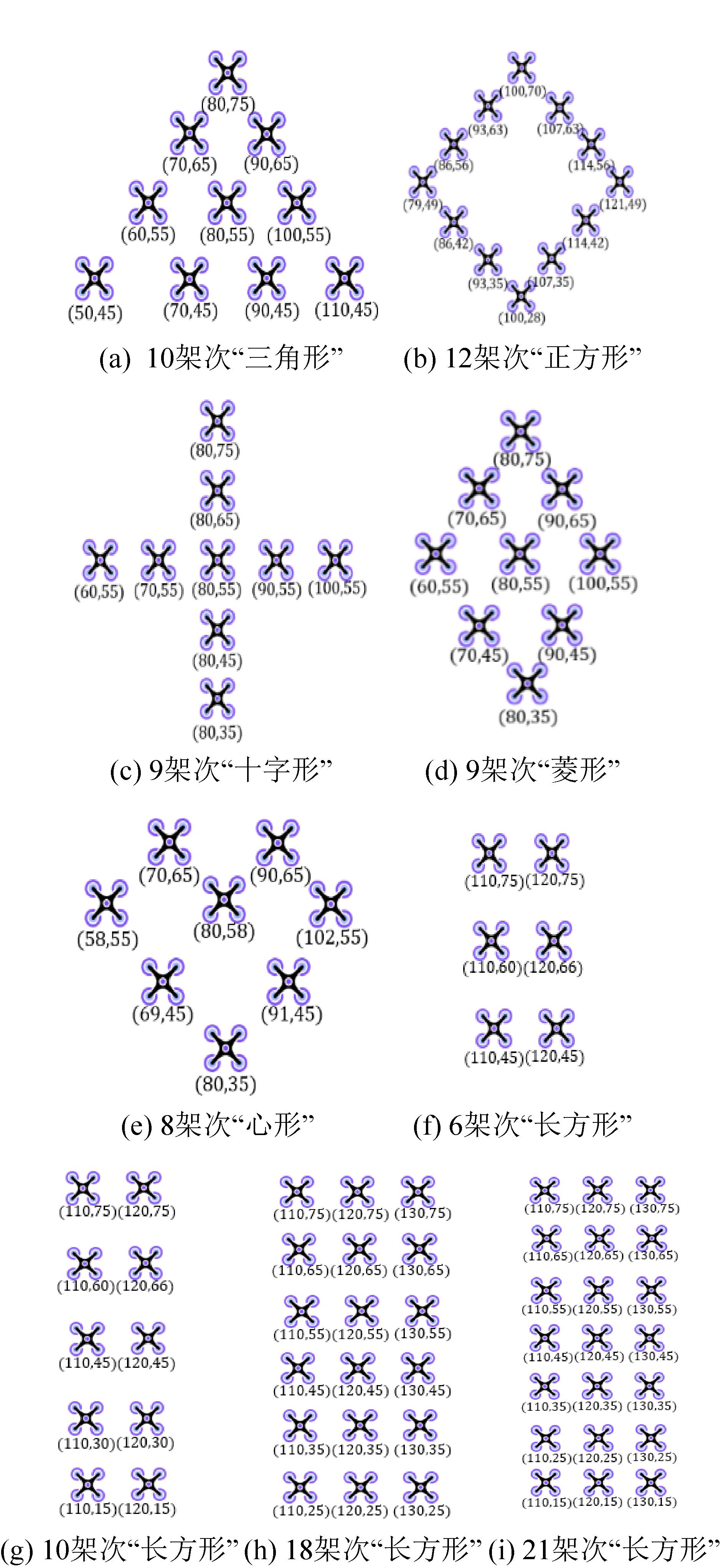
Fig. 6
MADDPG algorithm training cumulative reward curve
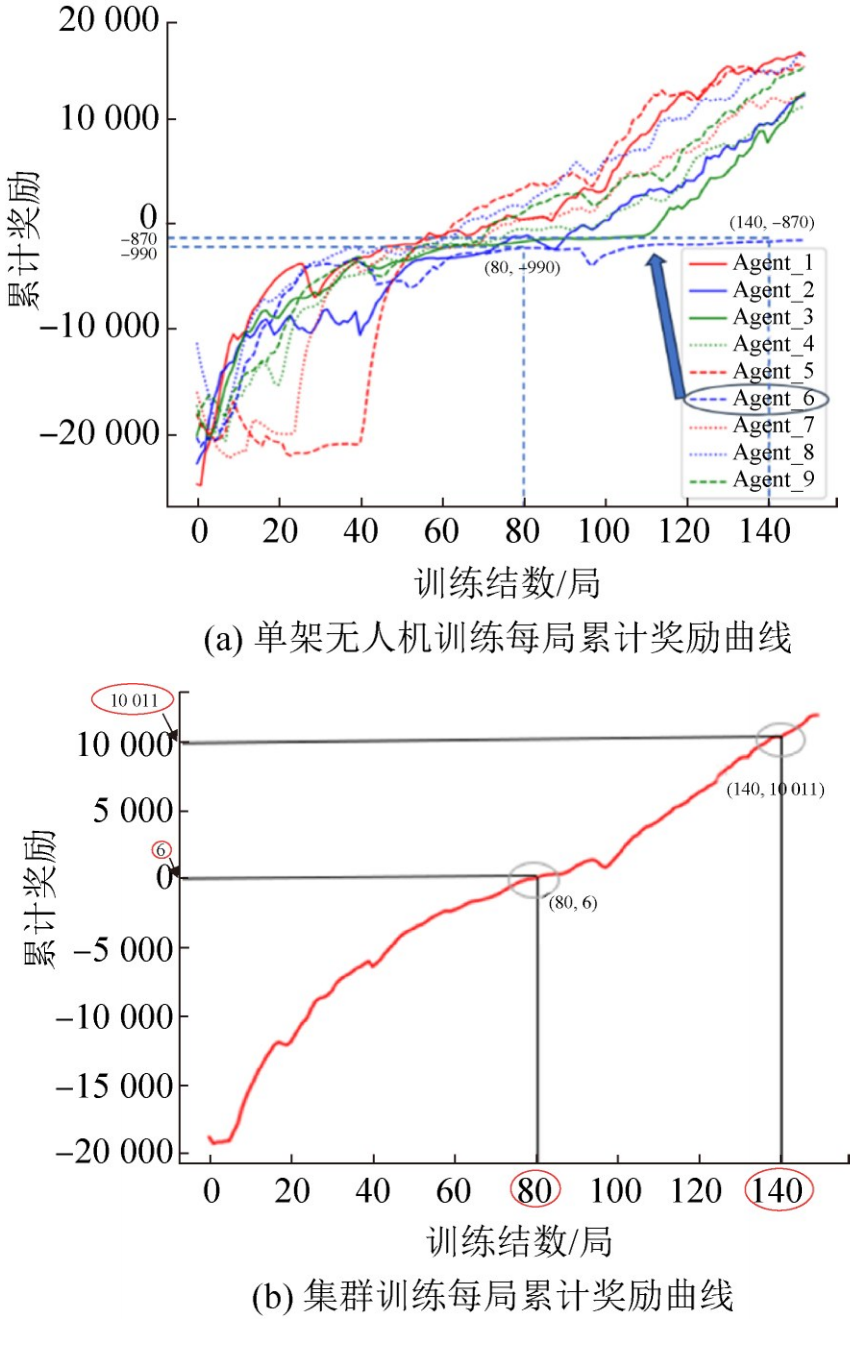
Fig. 7
LDE-MADDPG algorithm training cumulative reward curve
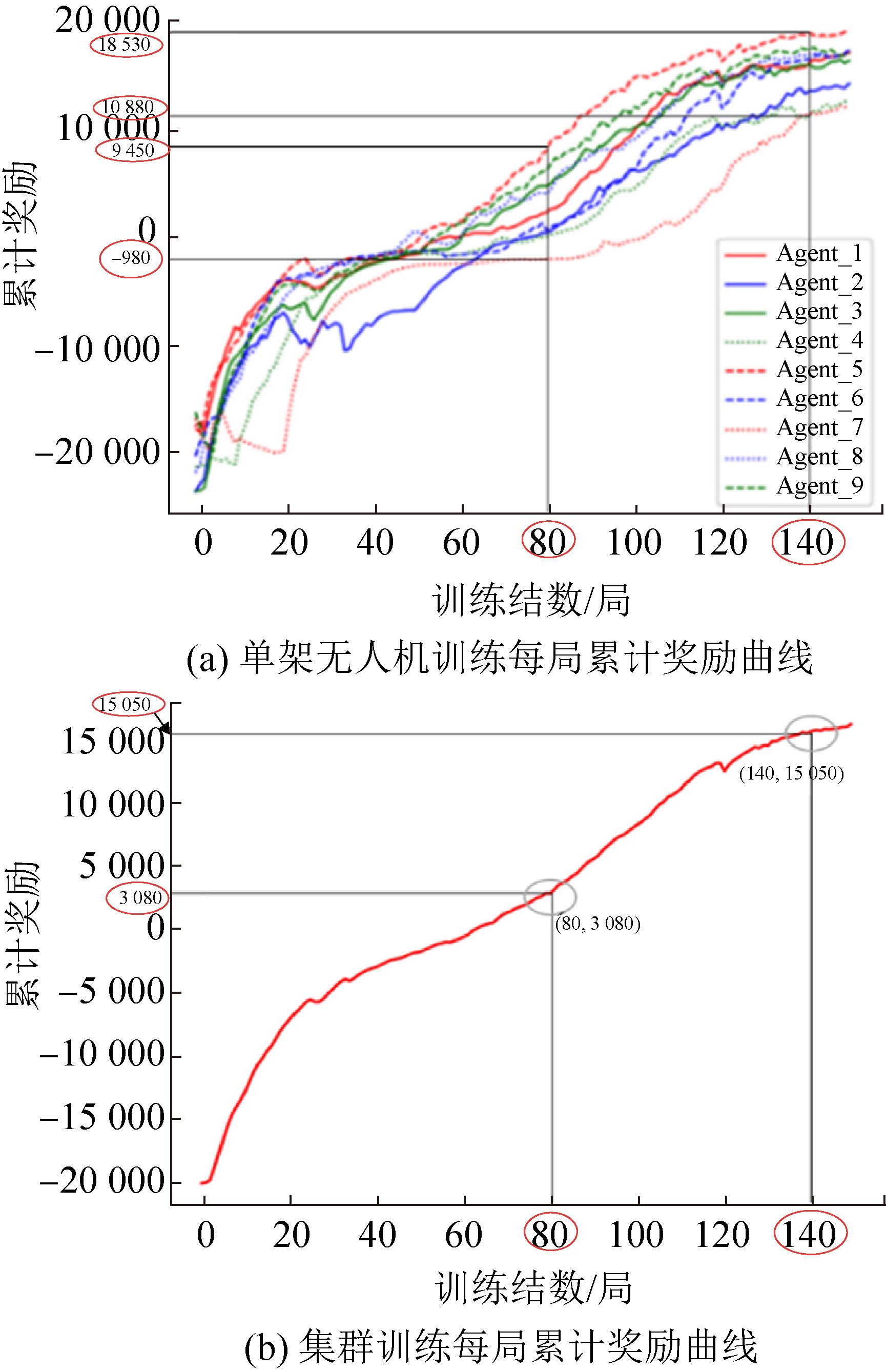
Table 3
Training process
| 局数 | 架次 | ||||
|---|---|---|---|---|---|
| 第1架 | 第2架 | 第3架 | 第4架 | 第5架 | |
| 第80局 | 240 | -870 | -980 | -460 | 1 550 |
| 第140局 | 15 220 | 10 110 | 9 420 | 10 050 | 11 980 |
| 训练进程 | 249.7/局 | 183.0/局 | 173.3/局 | 175.2/局 | 173.8/局 |
| 局数 | 架次 | 集群 | |||
| 第6架 | 第7架 | 第8架 | 第9架 | ||
| 第80局 | -990 | 240 | 880 | 450 | 6 |
| 第140局 | -870 | 10 150 | 12 320 | 11 840 | 10 011 |
| 训练进程 | 2.0/局 | 165.2/局 | 190.7/局 | 189.8/局 | 166.75/局 |
Table 4
Training process
| 局数 | 架次 | ||||
|---|---|---|---|---|---|
| 第1架 | 第2架 | 第3架 | 第4架 | 第5架 | |
| 第80局 | 1 080 | 250 | 5 210 | 130 | 9 450 |
| 第140局 | 16 210 | 12 870 | 15 890 | 10 900 | 18 530 |
| 训练进程 | 252.2/局 | 210.3/局 | 178.0/局 | 179.5/局 | 153/局 |
| 局数 | 架次 | 集群 | |||
| 第6架 | 第7架 | 第8架 | 第9架 | ||
| 第80局 | 280 | -980 | 4 460 | 7 840 | 3 080 |
| 第140局 | 16 430 | 10 880 | 16 090 | 17 650 | 15 050 |
| 训练进程 | 269.2/局 | 197.7/局 | 193.8/局 | 163.5/局 | 199.5/局 |

Fig. 8
Experimental results of 10 UAV cluster "triangle" formation assembly
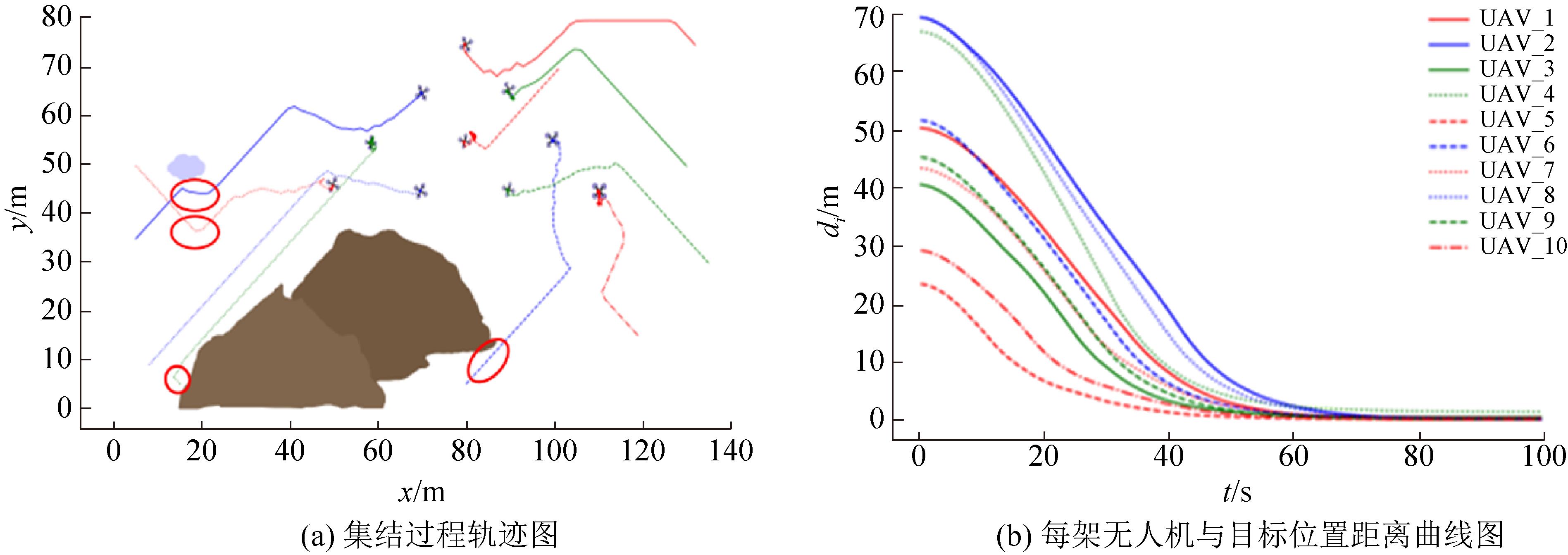

Fig. 9
Experimental results of 12 UAV cluster "square" formation assembly
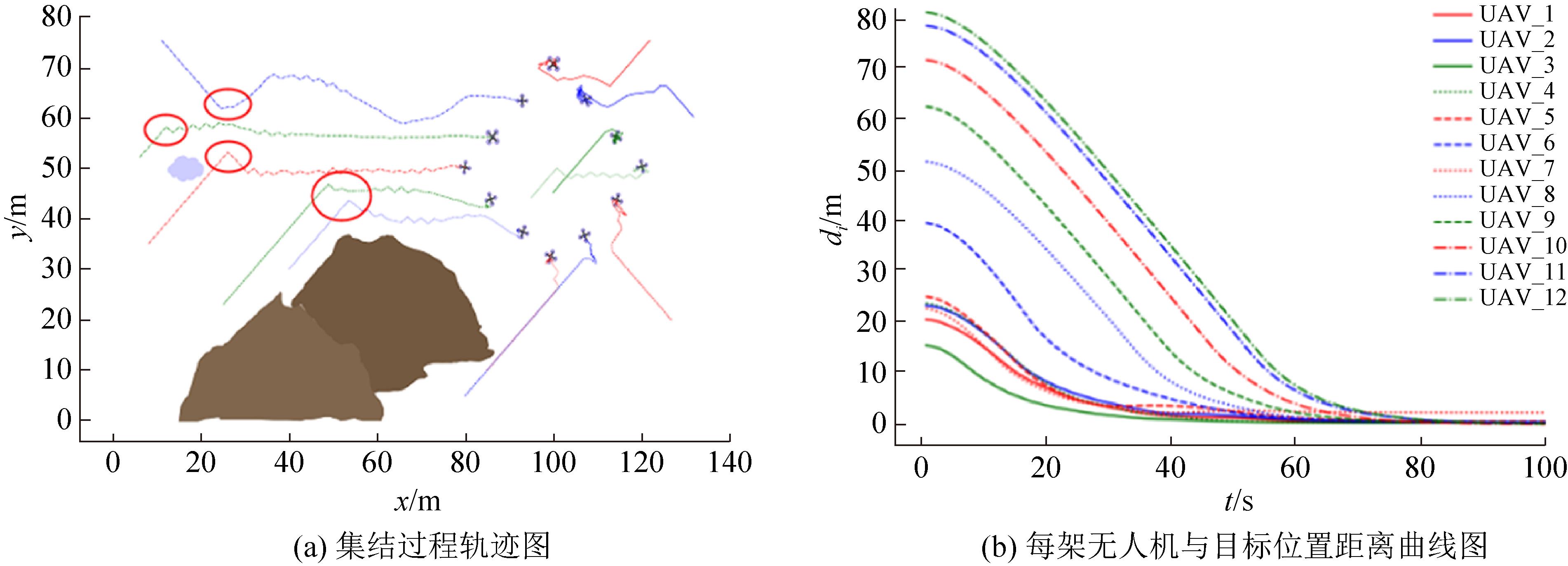
Fig. 10
Experimental results of 9 UAV cluster "cross" formation assembly
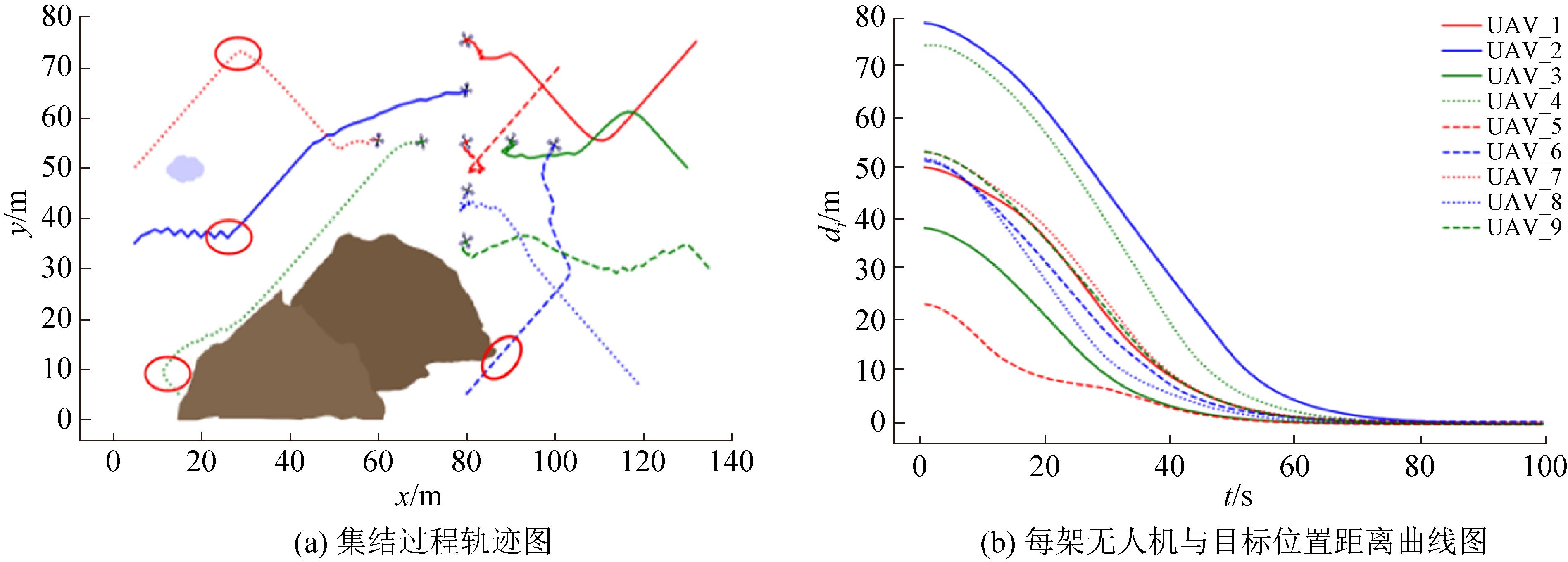
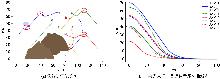
Fig. 11
Experimental results of 8 UAV cluster "heart-shaped" formation assembly
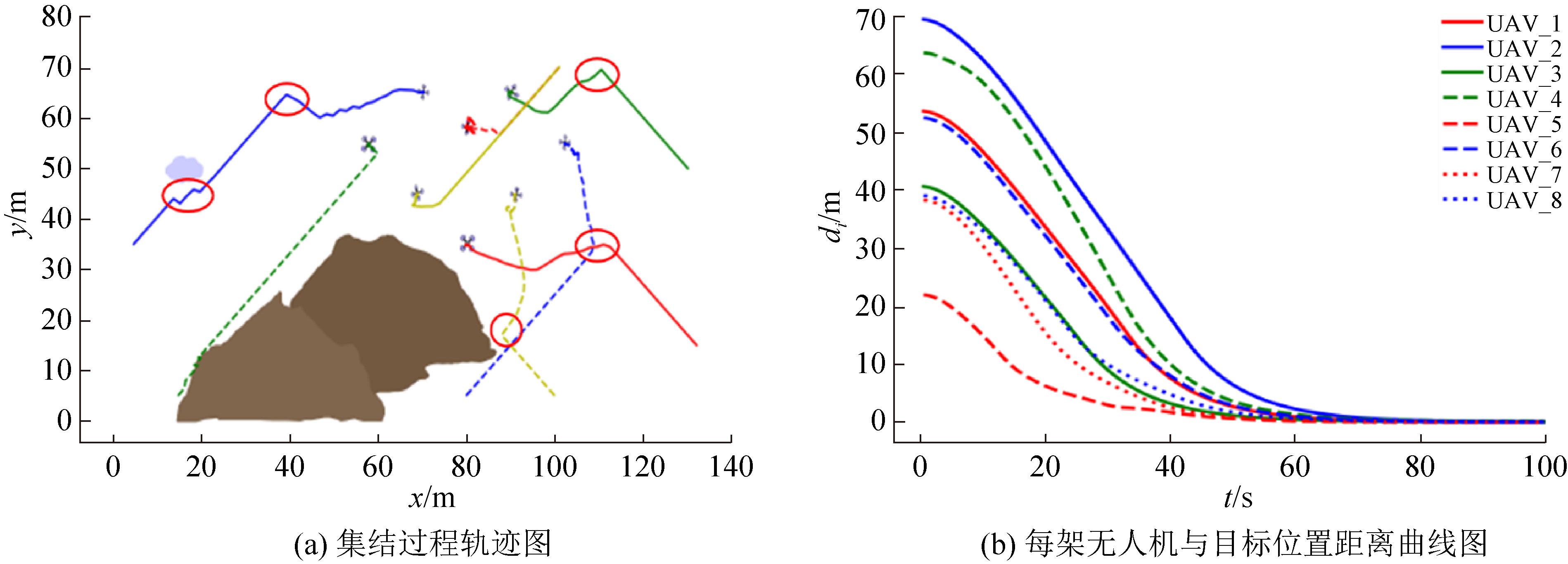

Fig. 12
Experimental results of 9 UAV cluster "diamond" formation assembly
Table 5
Distance of the drone from the target location
| 编队队形 | 距离/m | 集结完成时间/s | ||||
|---|---|---|---|---|---|---|
| 20 s | 40 s | 60 s | 80 s | 100 s | ||
| 10架次三角形 | 18.458 | 1.570 | 0.625 | 0.625 | 0.625 | 60 |
| 12架次正方形 | 17.836 | 5.753 | 0.524 | 0.521 | 0.521 | 60 |
| 9架次十字形 | 24.851 | 3.021 | 0.259 | 0.259 | 0.259 | 60 |
| 8架次心形 | 16.744 | 1.189 | 0.218 | 0.218 | 0.218 | 40 |
| 9架次菱形 | 22.964 | 1.655 | 0.133 | 0.133 | 0.133 | 60 |
Fig. 13
Experimental results of 6 UAV cluster "rectangular" formation assembly
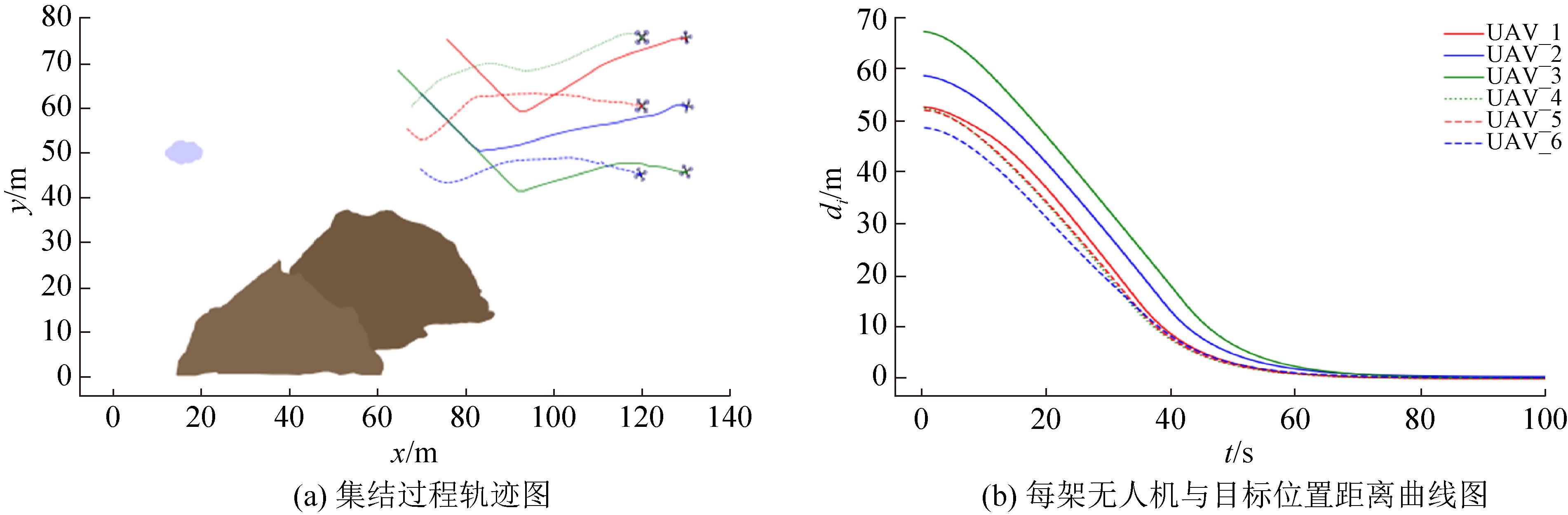
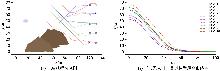
Fig. 14
Experimental results of 10 UAV cluster "rectangular" formation assembly
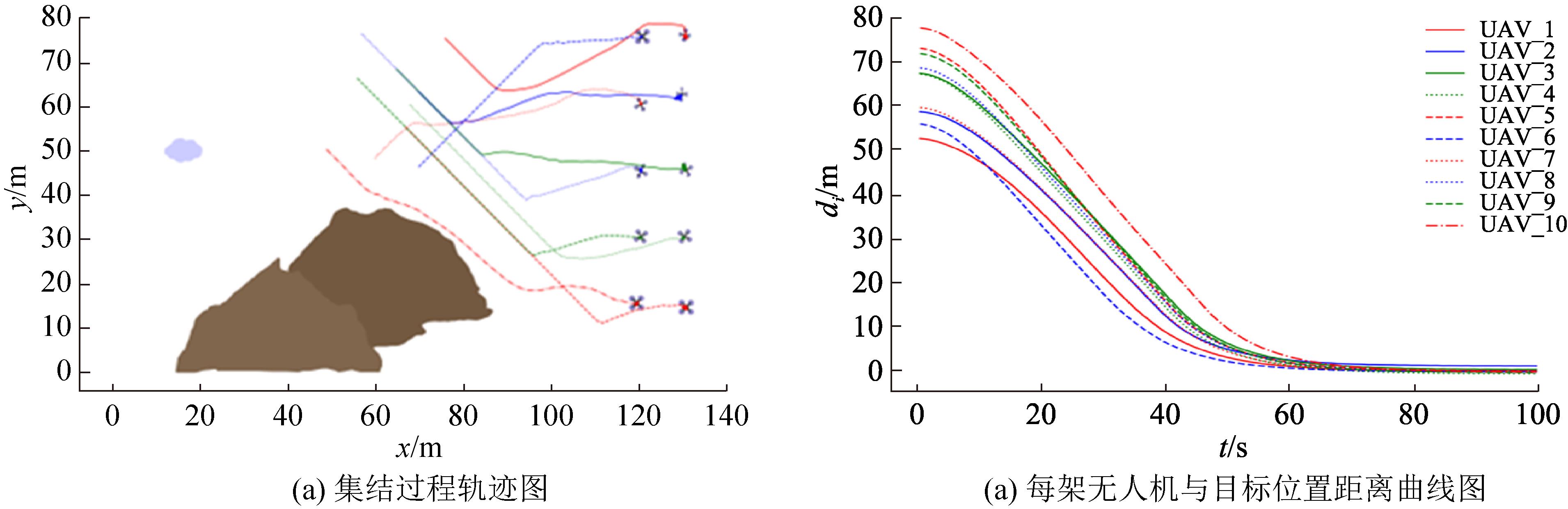

Fig. 15
Experimental results of 18 UAV cluster "rectangular" formation assembly
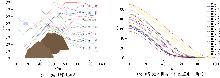
Fig. 16
Experimental results of 21 UAV cluster "rectangular" formation assembly
Table 6
Distance of the UAV cluster from the expected "rectangular" formation formation for different sorties
| 架次 | 距离/m | 集结完成时间/s | ||||
|---|---|---|---|---|---|---|
| 20 s | 40 s | 60 s | 80 s | 100 s | ||
| 6 | 26.308 | 1.080 | 0.208 | 0.208 | 0.208 | 40 |
| 10 | 31.796 | 3.281 | 0.873 | 0.793 | 0.727 | 60 |
| 18 | 47.711 | 13.990 | 2.167 | 0.294 | 0.294 | 80 |
| 21 | 47.626 | 17.839 | 4.018 | 0.123 | 0.123 | 80 |
| [1] | 任双, 周洁, 高嵩, 等. 基于注意力机制的无人机集群协同分群控制算法[J]. 电子学报, 2023, 51(7): 1898-1905. |
| Ren Shuang, Zhou Jie, Gao Song, et al. Cooperative Fission Control Algorithm of UAV Swarm Based on Attention Mechanism[J]. Acta Electronica Sinica, 2023, 51(7): 1898-1905. | |
| [2] | 王元鑫, 温家鑫, 袁涛, 等. 无人机集结问题主要性能指标[J]. 兵工自动化, 2020, 39(10): 71-75. |
| Wang Yuanxin, Wen Jiaxin, Yuan Tao, et al. Main Performance Index of UAV Aggregation Problem[J]. Ordnance Industry Automation, 2020, 39(10): 71-75. | |
| [3] | 孙田野, 孙伟, 吴建军. 改进Quatre算法的无人机编队快速集结方法[J]. 系统工程与电子技术, 2022, 44(9): 2840-2848. |
| Sun Tianye, Sun Wei, Wu Jianjun. UAV Formation Rapid Assembly Method Based on Improved Quatre Algorithm[J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. | |
| [4] | Kuriki Yasuhiro, Namerikawa Toru. Consensus-based Cooperative Formation Control with Collision Avoidance for a Multi-UAV System[C]//2014 American Control Conference. Piscataway: IEEE, 2014: 2077-2082. |
| [5] | Reynolds C W. Flocks, Herds and Schools: A Distributed Behavioral Model[C]//Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques. New York: ACM, 1987: 25-34. |
| [6] | 段海滨, 王道波, 于秀芬. 几种新型仿生优化算法的比较研究[J]. 计算机仿真, 2007, 24(3): 169-172, 253. |
| Duan Haibin, Wang Daobo, Yu Xiufen. Research on Some Novel Bionic Optimization Algorithms[J]. Computer Simulation, 2007, 24(3): 169-172, 253. | |
| [7] | 邱华鑫, 段海滨. 从鸟群群集飞行到无人机自主集群编队[J]. 工程科学学报, 2017, 39(3): 317-322. |
| Qiu Huaxin, Duan Haibin. From Collective Flight in Bird Flocks to Unmanned Aerial Vehicle Autonomous Swarm Formation[J]. Chinese Journal of Engineering, 2017, 39(3): 317-322. | |
| [8] | 夏家伟, 刘志坤, 朱旭芳, 等. 基于多智能体强化学习的无人艇集群集结方法[J]. 北京航空航天大学学报, 2023, 49(12): 3365-3376. |
| Xia Jiawei, Liu Zhikun, Zhu Xufang, et al. A Coordinated Rendezvous Method for Unmanned Surface Vehicle Swarms Based on Multi-agent Reinforcement Learning[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(12): 3365-3376. | |
| [9] | 李波, 越凯强, 甘志刚, 等. 基于MADDPG的多无人机协同任务决策[J]. 宇航学报, 2021, 42(6): 757-765. |
| Li Bo, Yue Kaiqiang, Gan Zhigang, et al. Multi-UAV Cooperative Autonomous Navigation Based on Multi-agent Deep Deterministic Policy Gradient[J]. Journal of Astronautics, 2021, 42(6): 757-765. | |
| [10] | 赵琳, 吕科, 郭靖, 等. 基于深度强化学习的无人机集群协同作战决策方法[J]. 计算机应用, 2023, 43(11): 3641-3646. |
| Zhao Lin, Ke Lü, Guo Jing, et al. UAV Cluster Cooperative Combat Decision-making Method Based on Deep Reinforcement Learning[J]. Journal of Computer Applications, 2023, 43(11): 3641-3646. | |
| [11] | Li Bo, Liang Shiyang, Gan Zhigang, et al. Research on Multi-UAV Task Decision-making Based on Improved MADDPG Algorithm and Transfer Learning[J]. International Journal of Bio-Inspired Computation, 2021, 18(2): 82-91. |
| [12] | 孙彧, 徐越, 潘宣宏, 等. 基于后验经验回放的MADDPG算法[J]. 指挥信息系统与技术, 2021, 12(6): 78-84. |
| Sun Yu, Xu Yue, Pan Xuanhong, et al. Multi-agent Deep Deterministic Policy Gradient (MADDPG) Algorithm Based on Hindsight Experience Replay (HER)[J]. Command Information System and Technology, 2021, 12(6): 78-84. | |
| [13] | 周佳炜, 孙宇祥, 薛宇凡, 等. 融合先验知识的异构多智能体强化学习算法研究[J]. 指挥控制与仿真, 2023, 45(3): 99-107. |
| Zhou Jiawei, Sun Yuxiang, Xue Yufan, et al. Heterogeneous Multi-agent Reinforcement Learning Algorithm Integrating Prior-knowledge[J]. Command Control & Simulation, 2023, 45(3): 99-107. | |
| [14] | 符小卫, 徐哲, 王辉. 基于DDPG的无人机追捕任务泛化策略设计[J]. 西北工业大学学报, 2022, 40(1): 47-55. |
| Fu Xiaowei, Xu Zhe, Wang Hui. Generalization Strategy Design of Uavs Pursuit Evasion Game Based on DDPG[J]. Journal of Northwestern Polytechnical University, 2022, 40(1): 47-55. | |
| [15] | Gebhardt G H W, Hüttenrauch M, Neumann G. Using M-embeddings to Learn Control Strategies for Robot Swarms[J]. Swarm Intelligence, 2019, 5(8): 22-35. |
| [1] | Ai Gaohang, Li Chuntao. UAV Swarm Obstacle Avoidance Based on Visual Filed and Adaptive Radius [J]. Journal of System Simulation, 2024, 36(12): 2945-2959. |
| [2] | Wang Ning, Liang Xiaolong, Zhang Jiaqiang, Hou Yueqi, Yang Aiwu. Research on Cross-domain Unmanned Swarm Cooperative Anti-submarine Search Method [J]. Journal of System Simulation, 2024, 36(4): 817-824. |
| [3] | Gui Xueqi, Li Chuntao. UAV Swarm Obstacle Avoidance Algorithm Based on Visual Field and Velocity Guidance [J]. Journal of System Simulation, 2024, 36(3): 545-554. |
| [4] | Li Gaoyang, Li Xiangfeng, Zhao Kang, Jin Yuchao, Yi Zhidong, Zuo Dunwen. Three-Dimensional Path Planning of UAV Based on All Particles Driving Wild Horse Optimizer Algorithm [J]. Journal of System Simulation, 2024, 36(3): 595-607. |
| [5] | Songming Jiao, Hui Ding, Yufei Zhong, Xin Yao, Jiahao Zheng. A UAV Target Tracking and Control Algorithm Based on SiamRPN [J]. Journal of System Simulation, 2023, 35(6): 1372-1380. |
| [6] | Zhao Jing, Wang Peng, Ding Xiaoqian, Jiang Guoping, Xu Fengyu, Sun Yanfei. Fault Tolerant Control and Simulation of Quadrotor Based on Adaptive Observer [J]. Journal of System Simulation, 2022, 34(1): 1-10. |
| [7] | Wang Biao, Tang Chaoying, Kong Daqing. Quadrotor Attitude Control Based on an Improved ADRC [J]. Journal of System Simulation, 2018, 30(8): 3124-3129. |
| [8] | Zhang Zhiwei, Tao Jianwu, Shao Xiao. Analysis of UAS Avoidance Warning Criteria Based on "τ-τ" [J]. Journal of System Simulation, 2018, 30(5): 1877-1885. |
| [9] | Wu Huaxing, Huang Wei, Kang Fengju, Mao Hongbao. Research on Autonomous Intercept Method for UCAV Based on Lead Attack Aiming [J]. Journal of System Simulation, 2016, 28(9): 2246-2253. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
