

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (3): 454-469.doi: 10.16182/j.issn1004731x.joss.21-1134
• Papers • Previous Articles Next Articles
Rong Hu1( ), Shuai Ding1, Bin Qian1,2, Changsheng Zhang1
), Shuai Ding1, Bin Qian1,2, Changsheng Zhang1
Received:2021-11-05
Revised:2022-02-09
Online:2023-03-30
Published:2023-03-22
CLC Number:
Rong Hu, Shuai Ding, Bin Qian, Changsheng Zhang. Hyper-heuristic Three Dimensional EDA for Solving Green Two-Sided Assembly Line Balancing Problem[J]. Journal of System Simulation, 2023, 35(3): 454-469.

Fig. 1
Robot bilateral assembly line layout
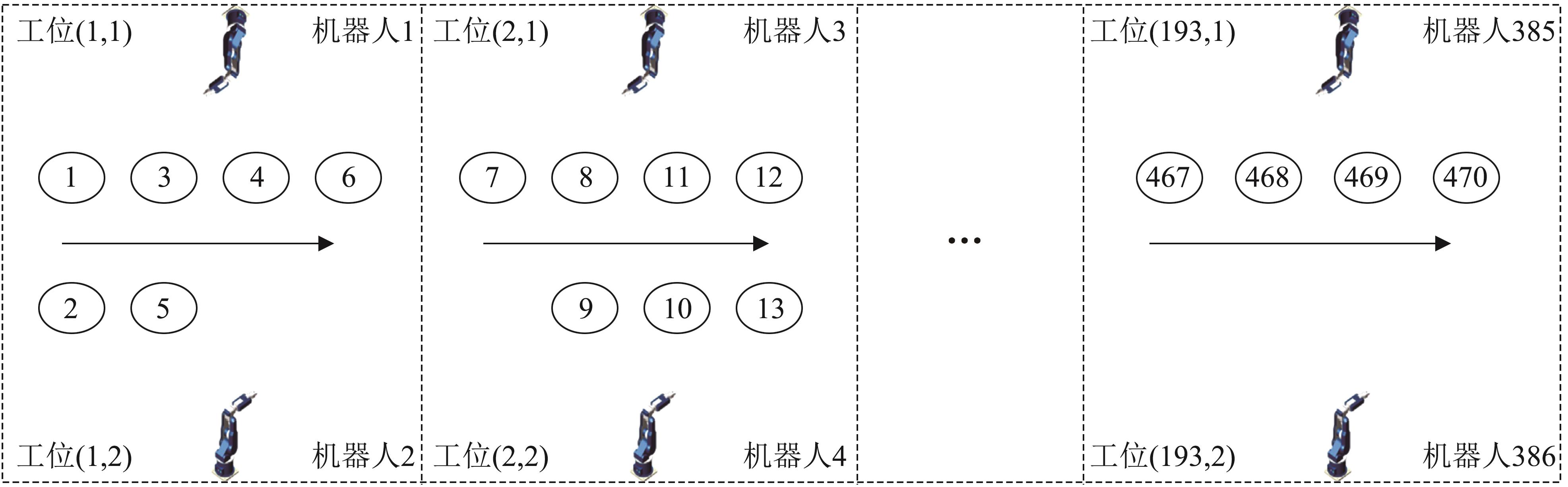

Fig. 2
Priority constraint relationship between process
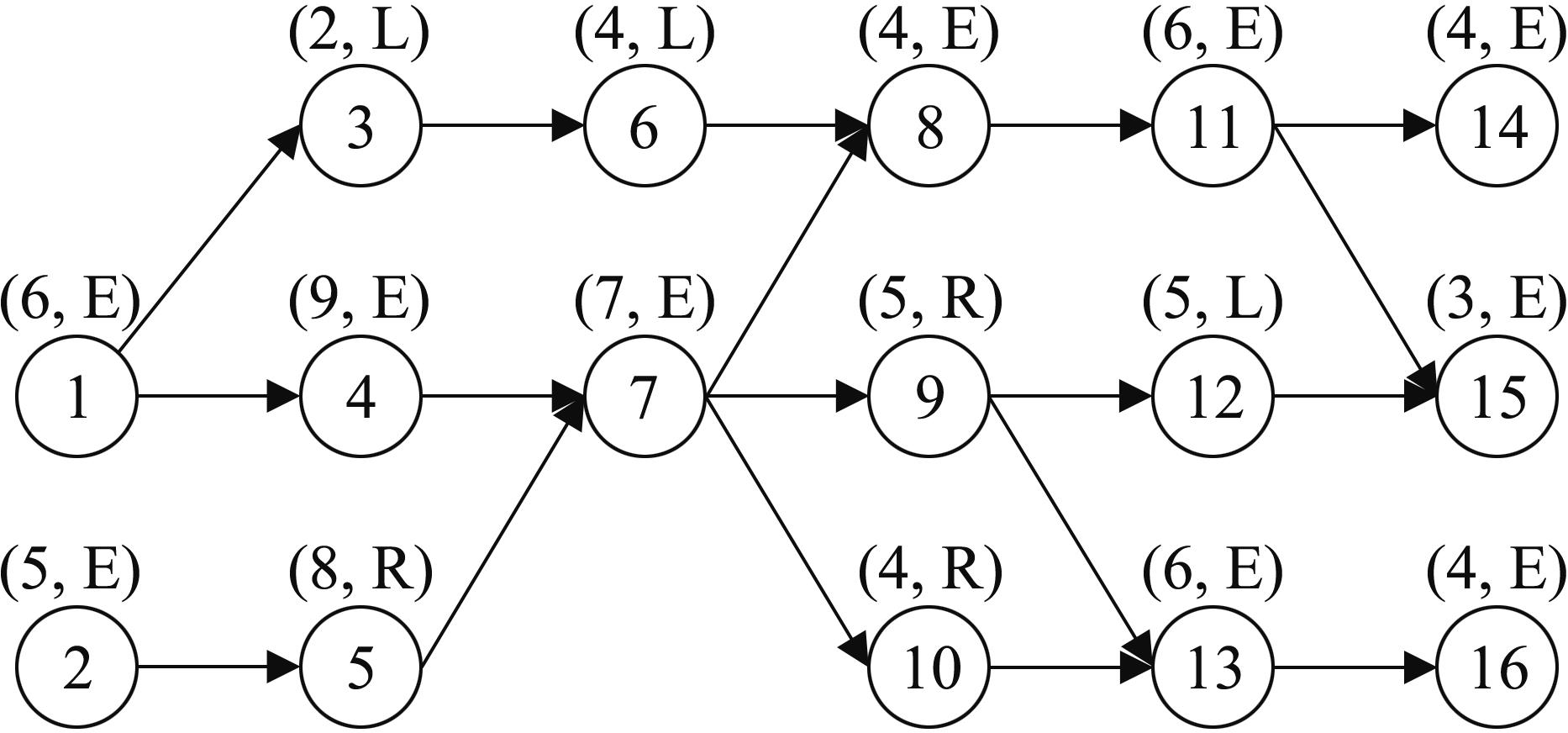
Table 1
Symbol definition
| 符号 | 定义 |
|---|---|
| 工序集合 | |
| 成对工位集合 | |
| 机器人类型集合 | |
| 工序数量 | |
| 成对的工位数量 | |
| 机器人r的可用数量 | |
| 可用机器人数量 | |
| 工序i的作业时间, | |
| 工序i使用机器人r的作业时间 | |
| 工序i的完工时间 | |
| 节拍时间 | |
| 机器人r关机所需时间 | |
| 机器人r开机所需时间 | |
| 工序i完工后机器人r的空载时间 | |
| 满足条件的 | |
| 机器人r空载时,执行开关机所需的最小时间 | |
| 机器人r可执行开关机次数 | |
| 机器人r每单位时间的能耗 | |
| 机器人r每单位时间的待机能耗 | |
| 机器人r执行开关机所需能耗 | |
| 机器人r执行开关机所节省的能耗 | |
| 成对工位j的k侧的能耗 | |
| 总能耗 | |
| 工序i优先装配方向集合 | |
| 工序i装配方向相反的集合 | |
| 没有直接前序任务的工序集合 | |
| 工序i的直接前序任务集合 | |
| 工序i的所有前序任务集合 | |
| 工序i的所有后序任务集合 | |
| 工序i的直接后序任务集合 | |
| 足够大的正整数 | |
| 位置约束的工序集合 | |
| 积极区域约束的工序集合 | |
| 消极区域约束的工序集合 | |
| 同步约束的工序集合 | |
| 如果工序i分配到工位 | |
| 如果机器人r分配到工位 | |
| 如果在同一个工位内工序i早于工序p分配,值取1;否则取0 | |
| 如果 |

Fig. 3
High-level policy domain individual diagram
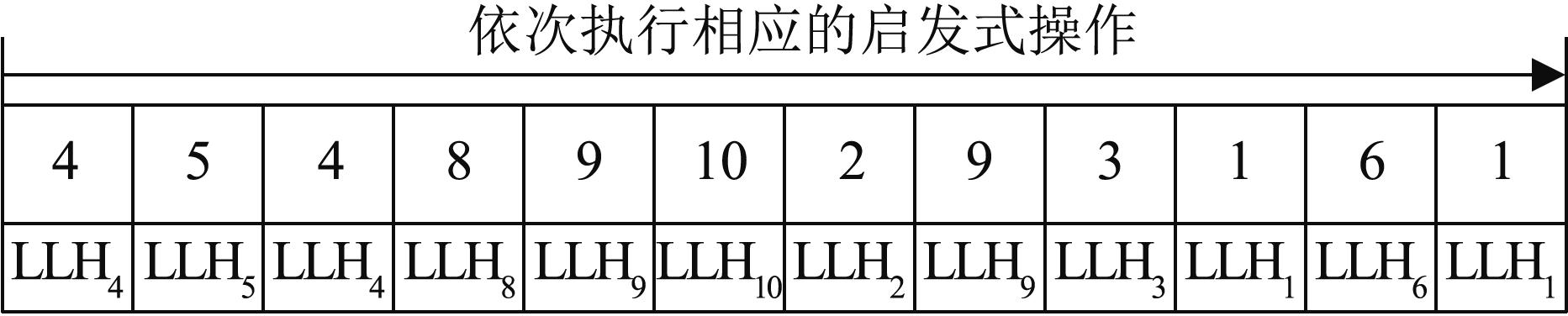
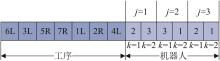
Fig. 4
Process and robot two-step coding
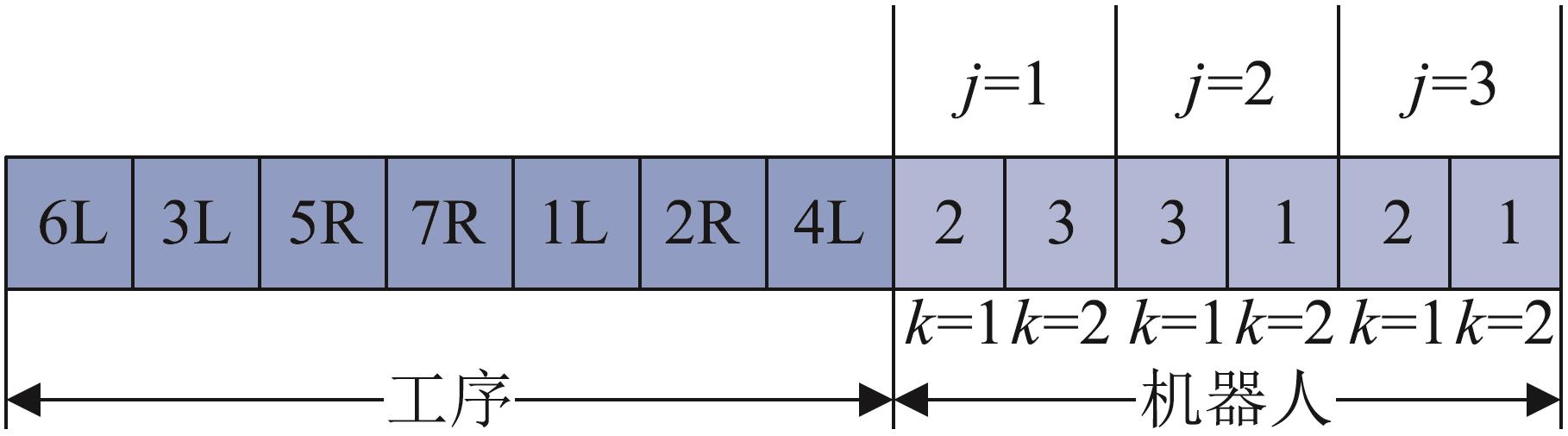

Fig. 5
TSFBCC coding schematic
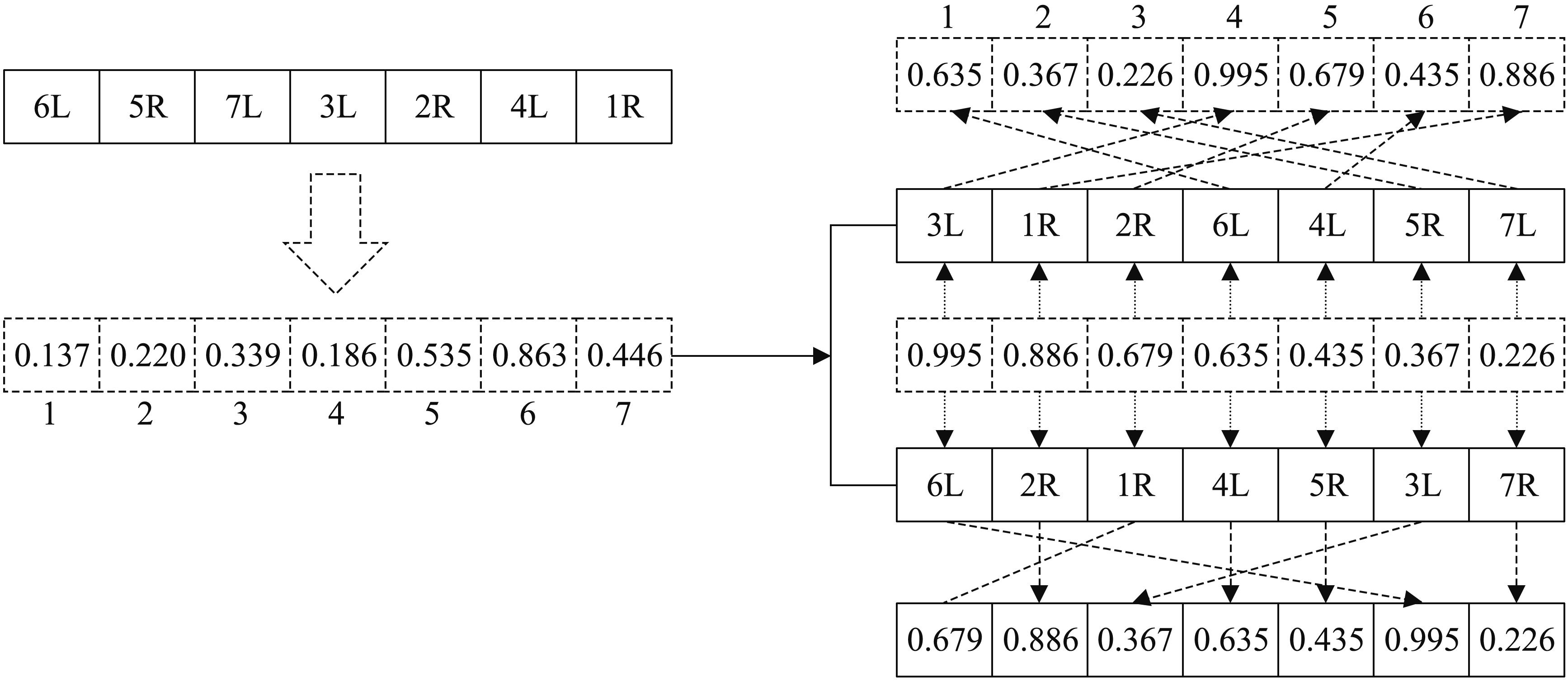
Fig. 6
HH3DEDA flow chart
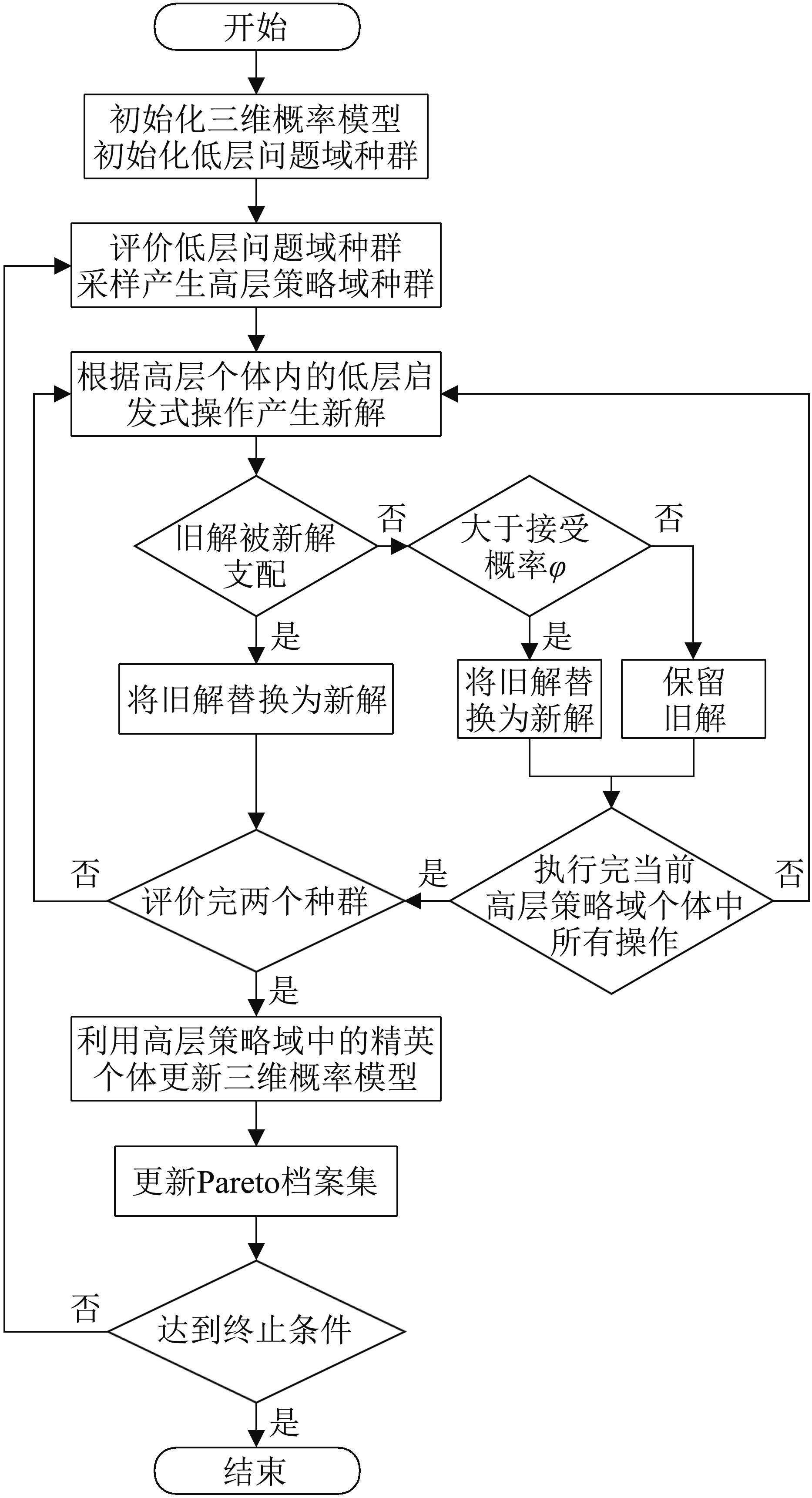
Table 2
Corresponding efficiency and energy consumption of different types of robots
| 机器人类型 | 效率ε | 能耗 |
|---|---|---|
| R1 | ||
| R2 | ||
| R3 |
Table 3
Constraints on the number of robots in different example sizes
| I | NR1 | NR2 | NR3 | NR |
|---|---|---|---|---|
| 12 | 4 | 3 | 3 | 10 |
| 16 | 4 | 3 | 3 | 10 |
| 24 | 6 | 4 | 4 | 14 |
| 65 | 7 | 5 | 6 | 18 |
| 148 | 8 | 7 | 7 | 22 |
| 205 | 10 | 7 | 7 | 24 |
Table 4
Part data Settings of standard example P65
| i | 优先约束工序 | ti0 | ε1 | ε2 | ε3 |
|---|---|---|---|---|---|
| 1 | — | 49 | 13 | 25 | 36 |
| 3 | 1, 2 | 71 | 18 | 27 | 35 |
| 16 | 15 | 151 | 21 | 32 | 39 |
| 25 | 4 | 113 | 26 | 28 | 41 |
| 35 | 34 | 132 | 17 | 36 | 43 |
| 46 | 44, 45 | 37 | 23 | 35 | 36 |
| 55 | 31 | 47 | 25 | 21 | 37 |
| 60 | 31 | 25 | 27 | 36 | 45 |
Table 5
Effectiveness of verifying HH3DEDA high-level policies
| n | CT/s | HHGA | HHEDA | HH3DEDA | |||
|---|---|---|---|---|---|---|---|
| R_N | N_N | R_N | N_N | R_N | N_N | ||
| 12 | 5 | 0.568 6 | 0.75 | 0.650 2 | 1.10 | 0.871 7 | 5.75 |
| 12 | 6 | 0.495 0 | 1.20 | 0.607 4 | 2.90 | 0.811 7 | 6.30 |
| 12 | 8 | 0.595 8 | 0.80 | 0.687 6 | 0.95 | 0.825 9 | 6.50 |
| 12 | 9 | 0.550 0 | 1.70 | 0.614 7 | 2.20 | 0.897 1 | 6.85 |
| 16 | 15 | 0.538 3 | 2.20 | 0.636 7 | 2.75 | 0.863 3 | 5.70 |
| 16 | 16 | 0.421 0 | 1.50 | 0.383 6 | 1.50 | 0.768 3 | 5.95 |
| 16 | 20 | 0.391 7 | 1.85 | 0.408 3 | 3.50 | 0.777 4 | 4.60 |
| 16 | 21 | 0.409 3 | 1.70 | 0.546 7 | 2.70 | 0.826 7 | 4.80 |
| 24 | 20 | 0.370 5 | 1.50 | 0.688 7 | 1.70 | 0.847 3 | 5.35 |
| 24 | 25 | 0.421 0 | 2.00 | 0.623 4 | 3.00 | 0.783 3 | 6.10 |
| 24 | 30 | 0.316 7 | 1.15 | 0.587 0 | 2.80 | 0.821 9 | 5.85 |
| 24 | 40 | 0.393 3 | 1.00 | 0.665 0 | 2.35 | 0.885 2 | 5.20 |
| 65 | 326 | 0.523 3 | 2.10 | 0.790 5 | 2.40 | 0.585 0 | 3.50 |
| 65 | 381 | 0.501 7 | 2.20 | 0.525 8 | 3.10 | 0.704 9 | 4.65 |
| 65 | 435 | 0.346 9 | 1.40 | 0.753 3 | 2.70 | 0.877 4 | 3.80 |
| 65 | 490 | 0.601 1 | 2.25 | 0.637 1 | 3.25 | 0.830 2 | 5.45 |
| 65 | 544 | 0.461 9 | 1.90 | 0.734 5 | 3.20 | 0.682 5 | 3.45 |
| 148 | 255 | 0.466 7 | 1.30 | 0.678 3 | 2.80 | 0.813 0 | 4.10 |
| 148 | 306 | 0.568 3 | 2.35 | 0.580 0 | 2.10 | 0.760 5 | 3.95 |
| 148 | 357 | 0.364 3 | 1.10 | 0.734 8 | 2.90 | 0.801 7 | 4.05 |
| 148 | 459 | 0.475 0 | 1.80 | 0.768 3 | 3.10 | 0.641 2 | 2.90 |
| 148 | 510 | 0.686 6 | 2.45 | 0.641 4 | 3.00 | 0.826 6 | 4.50 |
| 205 | 188 8 | 0.617 8 | 2.50 | 0.615 0 | 2.40 | 0.733 3 | 3.30 |
| 205 | 226 6 | 0.541 7 | 1.50 | 0.672 6 | 1.90 | 0.600 0 | 3.15 |
| 205 | 245 4 | 0.586 7 | 1.40 | 0.480 0 | 1.30 | 0.758 3 | 2.25 |
| 205 | 264 3 | 0.436 7 | 1.50 | 0.425 0 | 1.70 | 0.747 6 | 3.50 |
| 205 | 283 2 | 0.347 6 | 1.00 | 0.503 3 | 1.60 | 0.825 0 | 2.70 |
Table 6
Algorithm comparison results
| n | CT/s | ITLBO | IMMOGLS | HH3DEDA | n | CT/s | ITLBO | IMMOGLS | HH3DEDA | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R_N | N_N | R_N | N_N | R_N | N_N | R_N | N_N | R_N | N_N | R_N | N_N | ||||
| 12 | 5 | 0.223 6 | 0.85 | 0.041 7 | 0.25 | 0.9272 | 6.25 | 65 | 435 | 0.140 7 | 0.70 | 0.070 4 | 0.25 | 0.960 8 | 5.75 |
| 12 | 6 | 0.020 0 | 0.15 | 0.156 7 | 0.75 | 0.966 7 | 7.65 | 65 | 490 | 0.116 3 | 0.40 | 0.086 7 | 0.25 | 0.933 7 | 5.25 |
| 12 | 8 | 0 | 0 | 0 | 0 | 1.000 0 | 6.65 | 65 | 544 | 0.151 7 | 0.45 | 0.095 1 | 0.40 | 0.849 1 | 6.05 |
| 12 | 9 | 0.083 3 | 0.35 | 0 | 0 | 0.971 4 | 6.30 | 148 | 255 | 0.154 2 | 0.55 | 0.112 8 | 0.60 | 0.916 3 | 7.45 |
| 16 | 15 | 0.223 8 | 0.90 | 0.044 6 | 0.25 | 0.962 8 | 7.45 | 148 | 306 | 0.170 4 | 0.45 | 0.092 5 | 0.40 | 0.965 6 | 6.55 |
| 16 | 16 | 0.098 2 | 0.55 | 0.125 6 | 0.45 | 0.887 1 | 6.30 | 148 | 357 | 0.186 7 | 0.60 | 0.223 2 | 1.00 | 0.891 7 | 6.05 |
| 16 | 20 | 0.075 0 | 0.10 | 0.035 0 | 0.10 | 0.947 5 | 6.35 | 148 | 459 | 0.191 8 | 0.90 | 0.111 7 | 0.40 | 0.940 8 | 7.95 |
| 16 | 21 | 0.202 1 | 0.50 | 0.666 7 | 0.20 | 0.962 6 | 8.40 | 148 | 510 | 0.148 0 | 0.60 | 0.114 3 | 0.45 | 0.925 1 | 7.15 |
| 24 | 20 | 0.154 6 | 0.65 | 0.215 4 | 0.60 | 0.883 3 | 6.40 | 205 | 188 8 | 0.033 8 | 0.20 | 0.477 1 | 2.00 | 0.849 2 | 3.85 |
| 24 | 25 | 0.104 5 | 0.50 | 0.162 1 | 0.60 | 0.907 6 | 6.10 | 205 | 226 6 | 0.006 3 | 0.05 | 0.326 7 | 0.65 | 0.858 3 | 3.45 |
| 24 | 30 | 0.076 7 | 0.30 | 0.023 8 | 0.10 | 0.990 0 | 5.70 | 205 | 245 4 | 0.112 5 | 0.15 | 0.277 5 | 1.05 | 0.915 0 | 3.55 |
| 24 | 40 | 0.018 3 | 0.10 | 0 | 0 | 1.000 0 | 5.35 | 205 | 264 3 | 0.050 0 | 0.10 | 0.104 2 | 0.25 | 0.969 1 | 4.20 |
| 65 | 326 | 0.161 7 | 0.65 | 0.128 0 | 0.40 | 0.971 7 | 6.10 | 205 | 283 2 | 0.050 0 | 0.05 | 0.079 2 | 0.25 | 1.000 0 | 4.85 |
| 65 | 381 | 0.070 8 | 0.30 | 0.071 2 | 0.35 | 0.973 3 | 6.85 | ||||||||
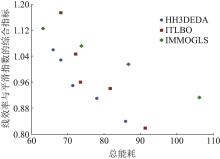
Fig. 7
Each algorithm solves n=16, CT=16 and obtains the schematic diagram of non-dominated solution
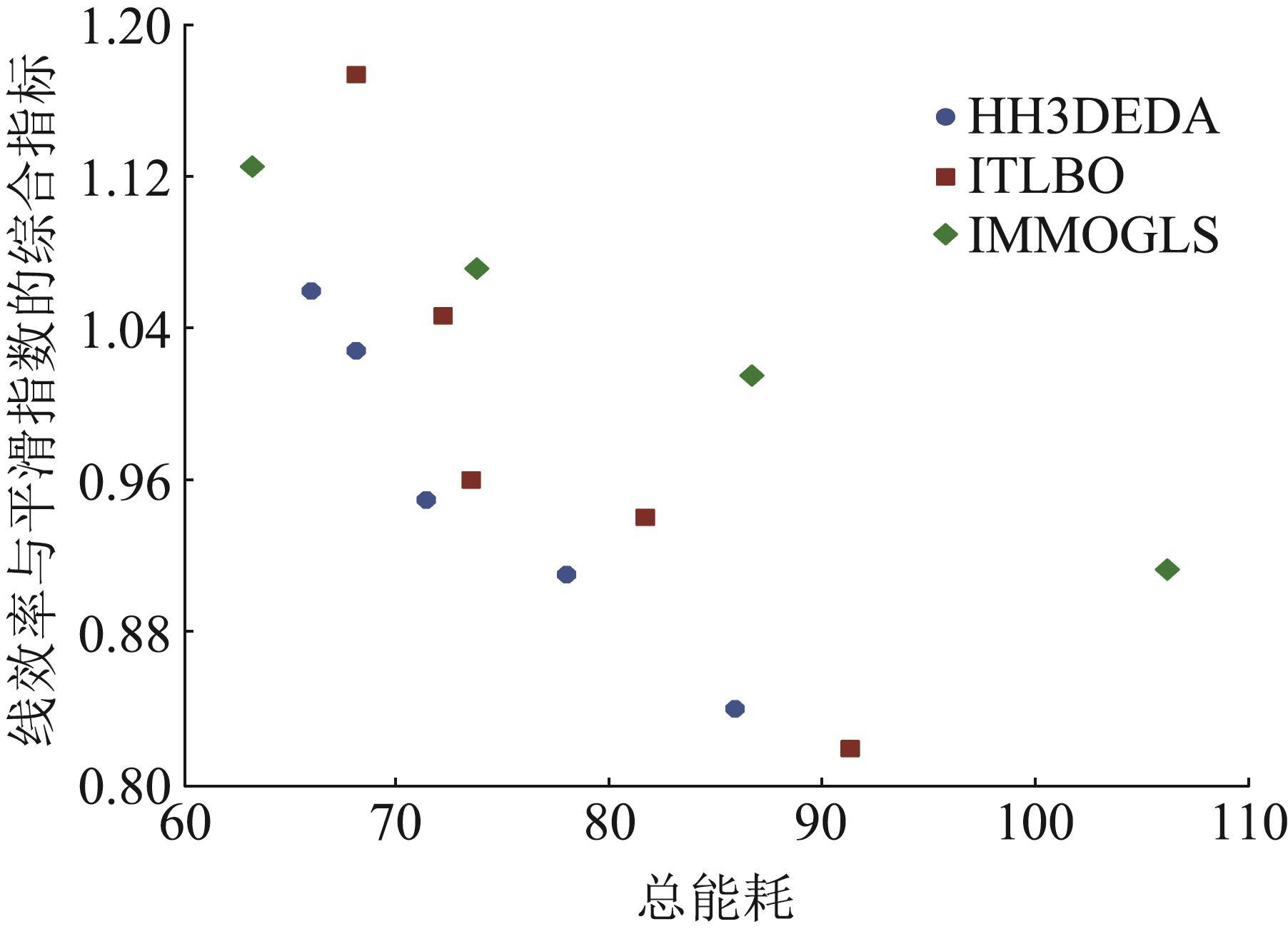
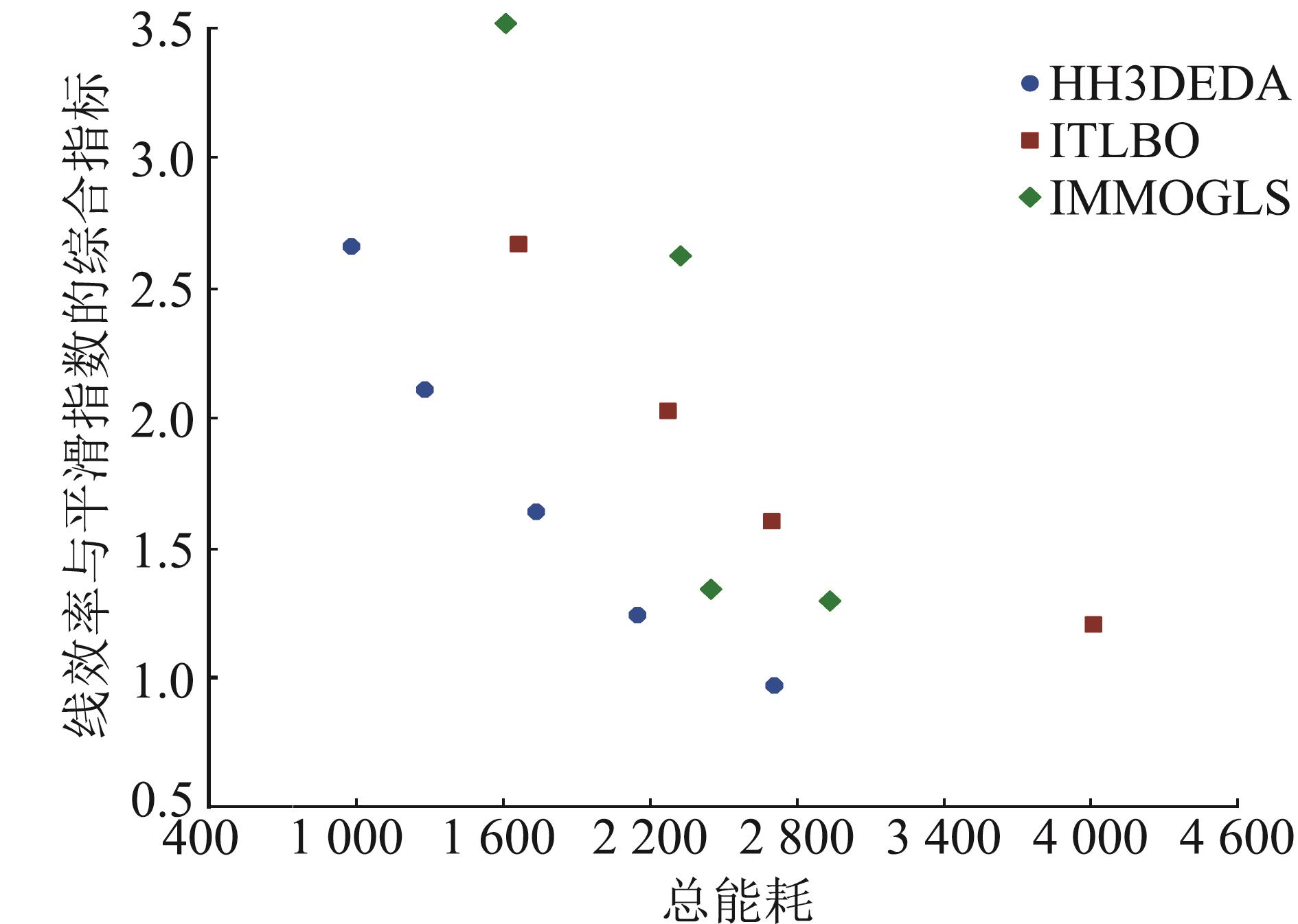
Fig. 8
Each algorithm solves n=148, CT=357 and obtains the schematic diagram of non-dominated solution
| 1 | Salveson M E. The Assembly Line Balancing Problem[J]. Journal of Industrial Engineering (S2314-4882), 1955, 29(10): 55-101. |
| 2 | Li Zixiang, Kucukkoc Ibrahim, Mukund Nilakantan J. Comprehensive Review and Evaluation of Heuristics and Meta-Heuristics for Two-Sided Assembly Line Balancing Problem[J]. Computers and Operations Research (S0305-0548), 2017, 84: 146-161. |
| 3 | Muhammad Razif Abdullah Make, Mohd Fadzil Faisae Ab Rashid, Muhamad Magffierah Razali. A Review of Two-Sided Assembly Line Balancing Problem[J]. The International Journal of Advanced Manufacturing Technology (S0268-3768), 2017, 89: 1743-1763. |
| 4 | Li Zixiang, Tang Qiuhua, Zhang LiPing. Two-Sided Assembly Line Balancing Problem of Type I: Improvements, a Simple Algorithm and a Comprehensive Study[J]. Computers & Operations Research (S0305-0548), 2017, 79: 78-93. |
| 5 | Bartholdi J J. Balancing Two-Sided Assembly Lines: A Case Study[J]. International Journal of Production Research (S0020-7543), 1993, 31(10): 2447-2461. |
| 6 | Zhong Yuguang, Deng Zexiao, Xu Ke. An Effective Artificial Fish Swarm Optimization Algorithm for Two-Sided Assembly Line Balancing Problems[J]. Computers & Industrial Engineering (S0360-8352), 2019, 138: 106-121. |
| 7 | Zheng Xiaojun, Ning Shiduo, Sun Hao, et al. Solving Multi-objective Two-Sided Assembly Line Balancing Problems by Harmony Search Algorithm Based on Pareto Entropy[J]. IEEE Access (S2169-3536), 2021, 9: 121728-121742. |
| 8 | Li Dashuang, Zhang Chaoyong, Shao Xinyu, et al. A Multi-objective TLBO Algorithm for Balancing Two-Sided Assembly line with Multiple Constraints[J]. Journal of Intelligent Manufacturing (S0956-5515), 2016, 27(4): 725-739. |
| 9 | 吴尔飞, 金烨, 汪峥. 双边装配线第二类平衡问题研究[J]. 计算机集成制造系统, 2005, 4(11): 1604-1608. |
| Wu Erfei, Jin Ye, Wang Zheng. Study on the Second Kind of Balance Problem of Bilateral Assembly Line[J]. Computer Integrated Manufacturing Systems, 2005, 4(11): 1604-1608. | |
| 10 | Ibrahim Kucukkoc, Zhang David Z. Type-E Parallel Two-Sided Assembly Line Balancing Problem: Mathema-Tical Model and Ant Colony Optimisation Based Approach with Optimized Parameters[J]. Computers and Industrial Engineering (S0360-8352), 2015, 84: 56-69. |
| 11 | Li Zixiang, Dey Nilanjan, Ashour Amira S, et al. Discrete Cuckoo Search Algorithms for Two-Sided Robotic Assembly Line Balancing Problem[J]. Neural Comput & Applic (S0941-0643), 2018, 30: 2685-2696. |
| 12 | Li Zixiang, Mukund Nilakantan Janardhanan, Tang Qiuhua, et al. Model and Metaheuristics for Robotic Two-Sided Assembly Line Balancing Problems with Setup Times-ScienceDirect[J]. Swarm and Evolutionary Computation (S2210-6502), 2019, 50: 567-583. |
| 13 | Wang Kaipu, Li Xinyu, Gao Liang. A Multi-objective Discrete Flower Pollination Algorithm for Stochastic Two-Sided Partial Disassembly Line Balancing Problem[J]. Computers & Industrial Engineering (S0360-8352), 2019, 130: 634-649. |
| 14 | Li Zixiang, Tang Qiuhua, Zhang Liping. Minimizing Energy Consumption and Cycle Time in Two-Sided Robotic Assembly Line Systems Using Restarted Simulated Annealing Algorithm[J]. Journal of Cleaner Production (S0959-6526), 2016, 135: 508-522. |
| 15 | Lin Jian. Backtracking Search Based Hyper-Heuristic for the Flexible Job-Shop Scheduling Problem with Fuzzy Processing Time[J]. Engineering Applications of Artificial Intelligence (S0952-1976), 2019, 77(1): 186-196. |
| 16 | Song Hongbo, Lin Jian. A Genetic Programming Hyper-Heuristic for the Distributed Assembly Permutation Flow-Shop Scheduling Problem with Sequence Dependent Setup Times[J]. Swarm and Evolutionary Computation (S2210-6502), 2021, 60: 100807. |
| 17 | 钱斌, 佘明哲, 胡蓉, 等. 超启发式交叉熵算法求解模糊分布式流水线绿色调度问题[J]. 控制与决策, 2021, 36(6): 1387-1396. |
| Qian Bin, She Mingzhe, Hu Rong, et al. Hyper-Heuristic Cross-Entropy Algorithm for Green Distributed Permutation Flow-Shop Scheduling Problem with Fuzzy Processing Time[J]. Journal of Control and Decision, 2021, 36(6): 1387-1396. | |
| 18 | 杨海军, 李建武, 李敏强. 进化算法的模式、涌现与困难性研究[M]. 北京: 科学出版社, 2012. |
| Yang Haijun, Li Jianwu, Li Minqiang. Evolutionary Algorithms: Schema, Emergence and Hardness[M]. Beijing: Science Press, 2012. | |
| 19 | 李大双, 张超勇, 邵新宇, 等. 基于殖民竞争算法的多约束双边装配线平衡[J]. 机械工程学报, 2015, 51(2): 183-189. |
| Li Dashuang, Zhang Chaoyong, Shao Xinyu, et al. Hybrid Colonial Competitive Algorithm for the Two-Sided Assembly Line Balancing Problem with Multiple Constraints[J]. Journal of Mechanical Engineering, 2015, 51(2): 183-189. | |
| 20 | 李大双, 张超勇, 邵新宇, 等. 基于多目标殖民竞争算法的随机型双边装配线[J]. 计算机集成制造系统, 2014, 20(11): 2774-2787. |
| Li Dashuang, Zhang Chaoyong, Shao Xinyu, et al. Balancing Stochastic Two-Sided Assembly Line with Multi-objective Colonial Competitive Algorithm[J]. Computer Integrated Manufacturing Systems, 2014, 20(11): 2774-2787. | |
| 21 | 张子凯, 唐秋华, 张利平. 多重资源约束下的多目标U型装配线平衡[J]. 计算机集成制造系统, 2017, 23(11): 2431-2441. |
| Zhang Zikai, Tang Qiuhua, Zhang Liping. Multi-objective U-Shaped Assembly Line Balancing under Multi-resource Restriction[J]. Computer Integrated Manufacturing Systems, 2017, 23(11): 100-110. | |
| 22 | 杨晓林, 胡蓉, 钱斌, 等. 增强分布估计算法求解低碳分布式流水线调度[J]. 控制理论与应用, 2019, 36(5): 803-815. |
| Yang Xiaolin, Hu Rong, Qian Bin, et al. Enhanced Distribution Estimation Algorithm for Low Carbon Distributed Pipeline Scheduling[J]. Control Theory & Applications, 2019, 36(5): 803-815. | |
| 23 | Pan Quanke, Ruiz Rubén. An Estimation of Distribution Algorithm for Lot-Streaming Flow Shop Problems with Setup Times[J]. Omega: The International Journal of Management Science (S0305-0483), 2011, 40(2): 166-180. |
| 24 | Du Yu, Li Junqing, Luo Chao, et al. A Hybrid Estimation of Distribution Algorithm for Distributed Flexible Job Shop Scheduling with Crane Transportations[J]. Swarm and Evolutionary Computation (S2210-6502), 2021, 62: 861-885. |
| 25 | Hackman S T, Magazine M J, Wee T S. Fast, Effective Algorithms for Simple Assembly Line Balancing Problems[J]. Operation Researsh (S0030-364X), 1989, 37(6): 916-924. |
| 26 | 郑逸凡, 钱斌, 胡蓉, 等. CE-GA协同进化算法求解人机共同作业的U形装配线平衡问题[J]. 机械工程学报, 2020, 56(9): 199-214. |
| Zheng Yifan, Qian Bin, Hu Rong, et al. CE-GA Co-evolutionary Algorithm for Solving U-Shaped Assembly Line Balancing Problem with Man-Robot Cooperation[J]. Journal of Mechanical Engineering, 2020, 56(9): 199-214. | |
| 27 | Hisao Ishibuchi, Tadashi Yoshida, Tadahiko Murata. Balance Between Genetic Search and Local Search in Memetic Algorithms for Multiobjective Permutation Flowshop Scheduling[J]. IEEE Transactions on Evolutionary Computation (S1089-778X), 2003, 7(2): 204-223. |
| [1] | Ji Zhicheng, Quan Zhen, Wang Yan. Optimization and Simulation of Adaptive Production Scheduling Based on Hybrid Decision-making Mechanism [J]. Journal of System Simulation, 2025, 37(7): 1791-1803. |
| [2] | Zhao Yanlin, Tian Yunna. Hyper-heuristic Approach with K-means Clustering for Inter-cell Scheduling [J]. Journal of System Simulation, 2024, 36(4): 941-956. |
| [3] | Shen Peng, Wang Yan, Ji Zhicheng, Zhang Jianhua. Hyper-heuristic DE Algorithm for Solving Zero-wait Fermentation Process Schedulinge [J]. Journal of System Simulation, 2020, 32(11): 2235-2243. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
