

系统仿真学报 ›› 2025, Vol. 37 ›› Issue (4): 1008-1024.doi: 10.16182/j.issn1004731x.joss.23-1552
张星宇1, 吴保磊2, 王军3, 洪妙英1, 王佳慧3, 祁永强1
收稿日期:2023-12-20
修回日期:2024-01-20
出版日期:2025-04-17
发布日期:2025-04-16
通讯作者:
祁永强
第一作者简介:张星宇(1998-),女,硕士生,研究方向为智能机器人控制。
基金资助:Zhang Xingyu1, Wu Baolei2, Wang Jun3, Hong Miaoying1, Wang Jiahui3, Qi Yongqiang1
Received:2023-12-20
Revised:2024-01-20
Online:2025-04-17
Published:2025-04-16
Contact:
Qi Yongqiang
摘要:
针对月球车在路径规划过程中会面临由复杂地形引起的安全避障和偏离目标等挑战,提出了基于滑移预测的双层路径规划,通过自适应选择平坦地形来减少月球车车轮的滑移。利用数字高程信息计算地形综合复杂度,设计了具有三级奖励机制的Q-learning算法来避开高滑移区域,实现全局路径规划;采用深度相机来感知障碍物,设计基于自适应预测时间的动态窗口法进行自主避障,并引入局部地形适宜度完成局部路径规划。数值和虚拟仿真结果表明:该算法可以在复杂地形环境下高效开展路径规划,且收敛速度快、安全性高。
中图分类号:
张星宇,吴保磊,王军等 . 基于滑移预测的月球车双层路径规划方法研究[J]. 系统仿真学报, 2025, 37(4): 1008-1024.
Zhang Xingyu,Wu Baolei,Wang Jun,et al . Research on Dual-layer Path Planning Method for Lunar Rover Based on Slip Prediction[J]. Journal of System Simulation, 2025, 37(4): 1008-1024.
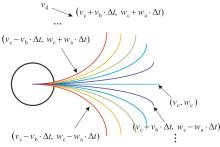
图1
预测轨迹
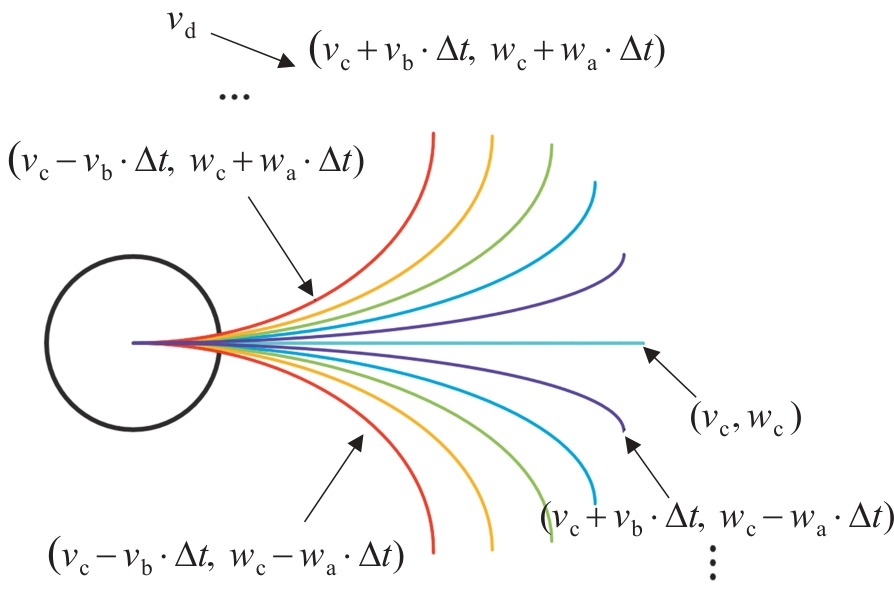
图2
分析窗口
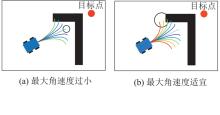
图3
最大角速度分析
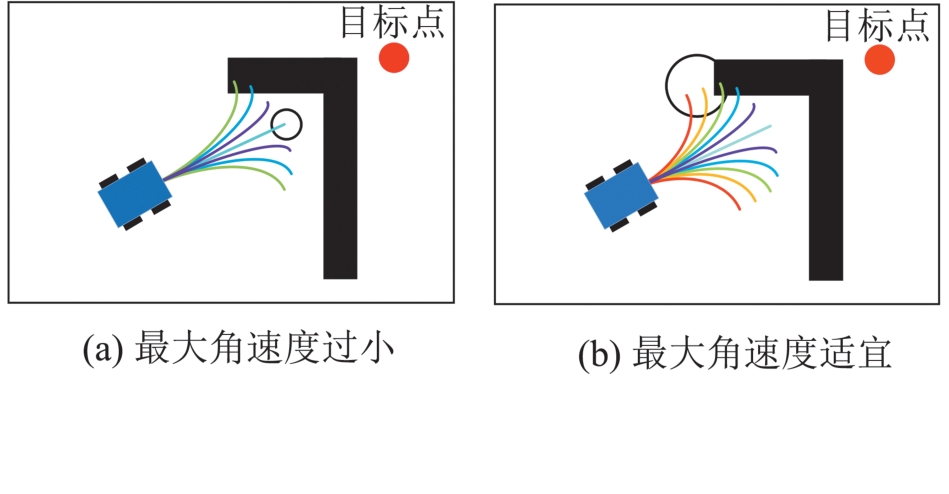

图4
自适应预测时间分析
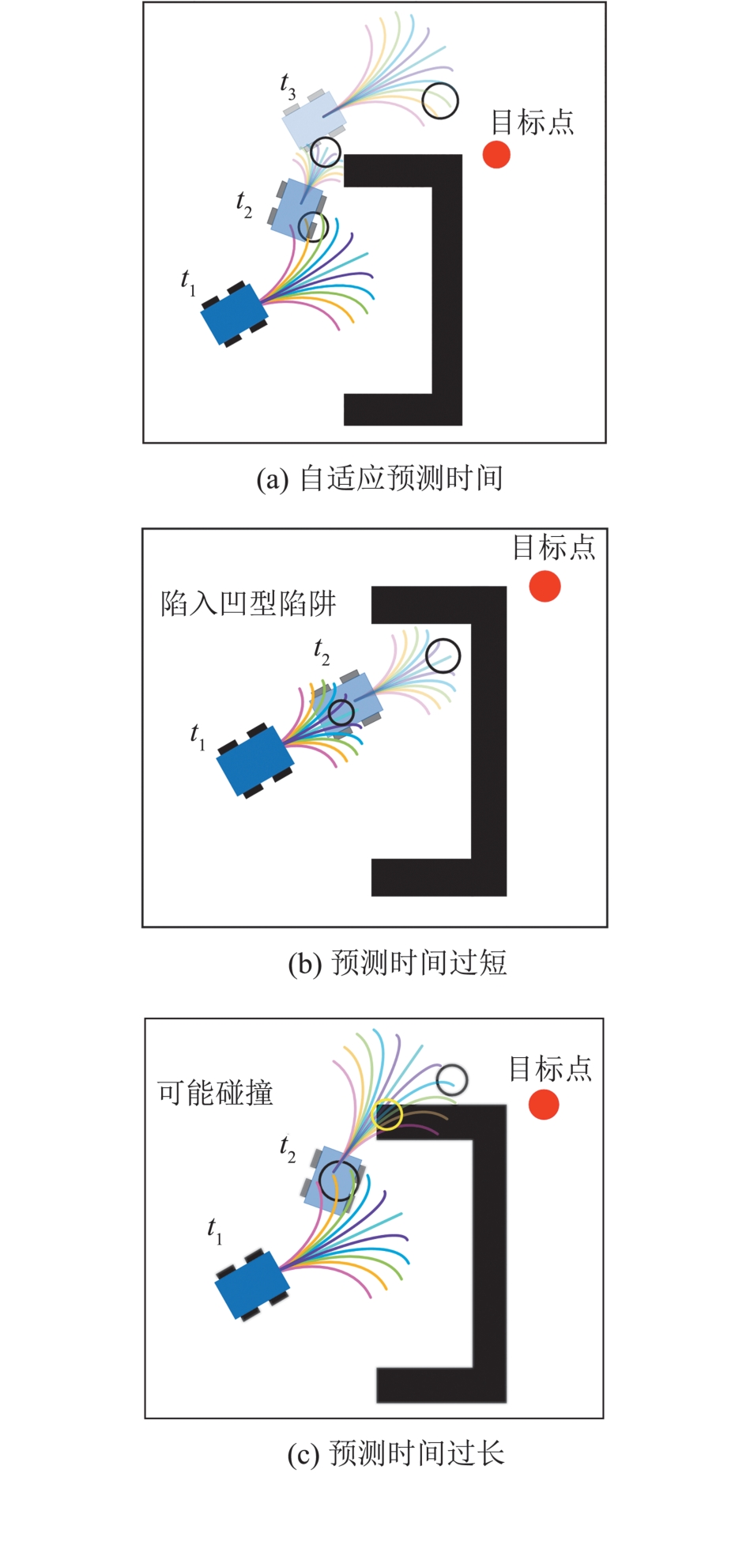
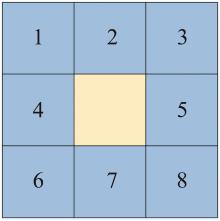
图5
8个方向
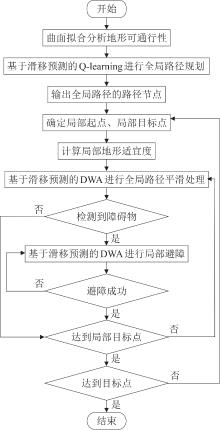
图6
基于滑移预测的双层路径规划流程图
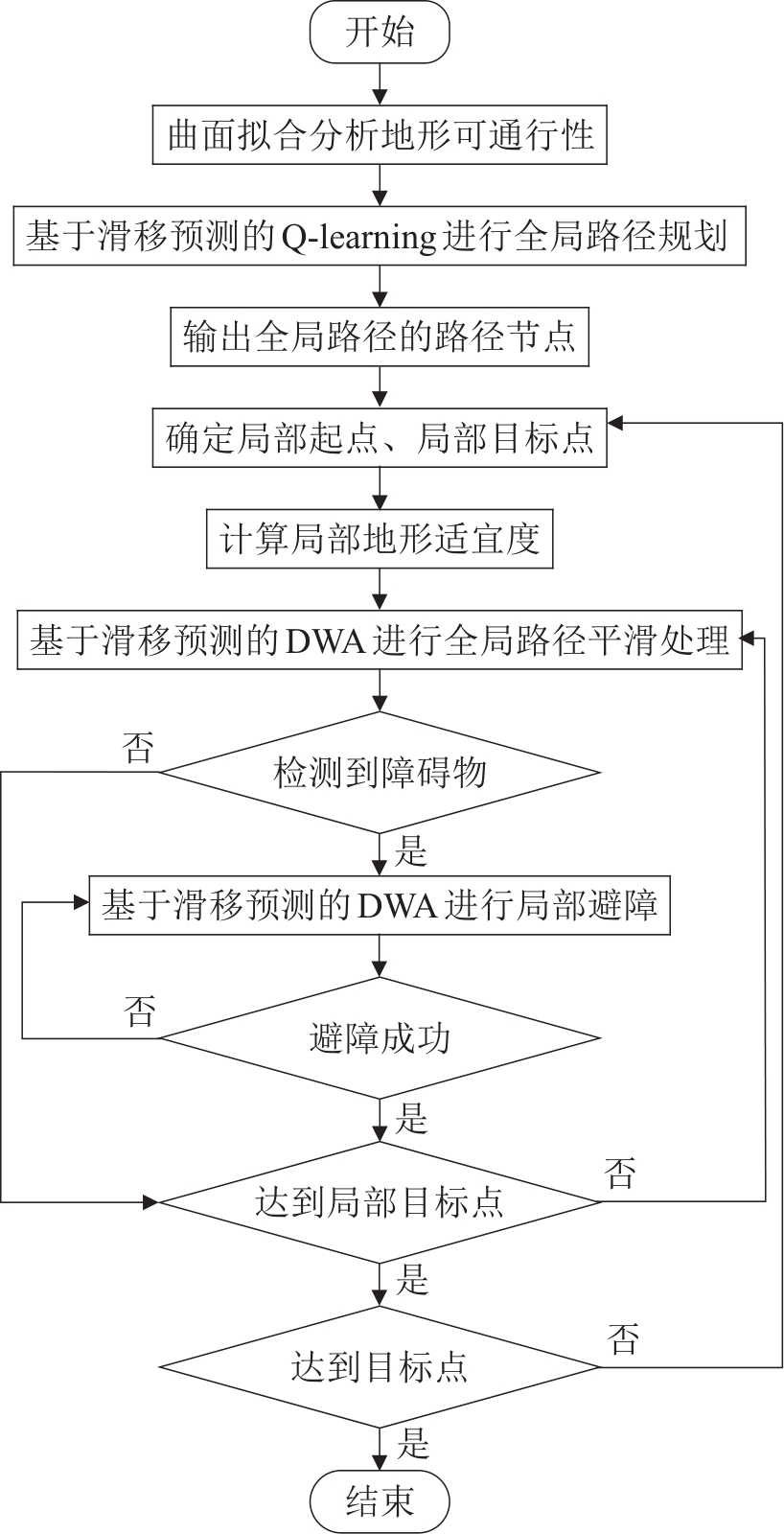
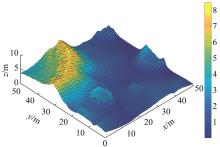
图7
月球表面三维地形模型
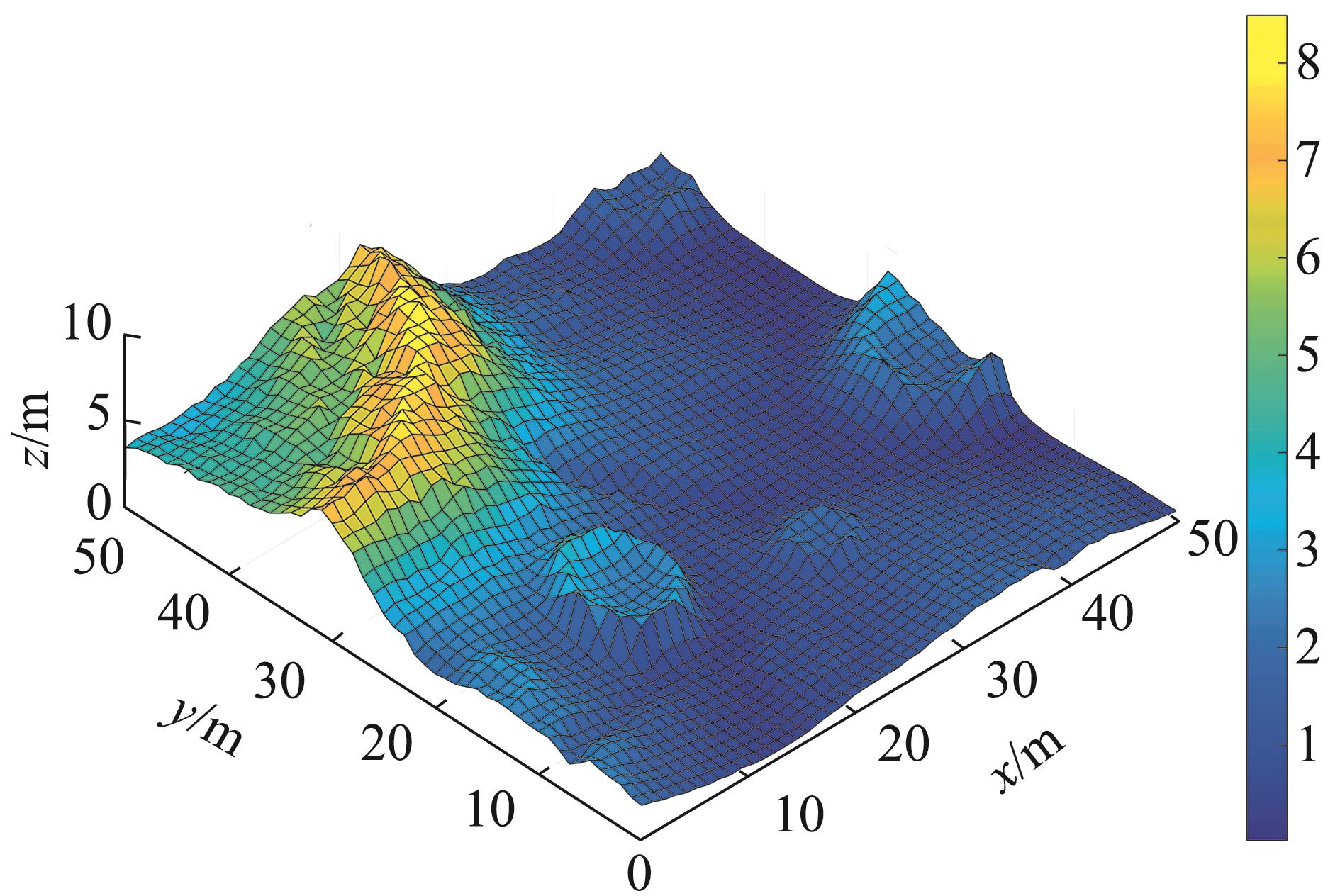
图8
地形综合复杂度分布图
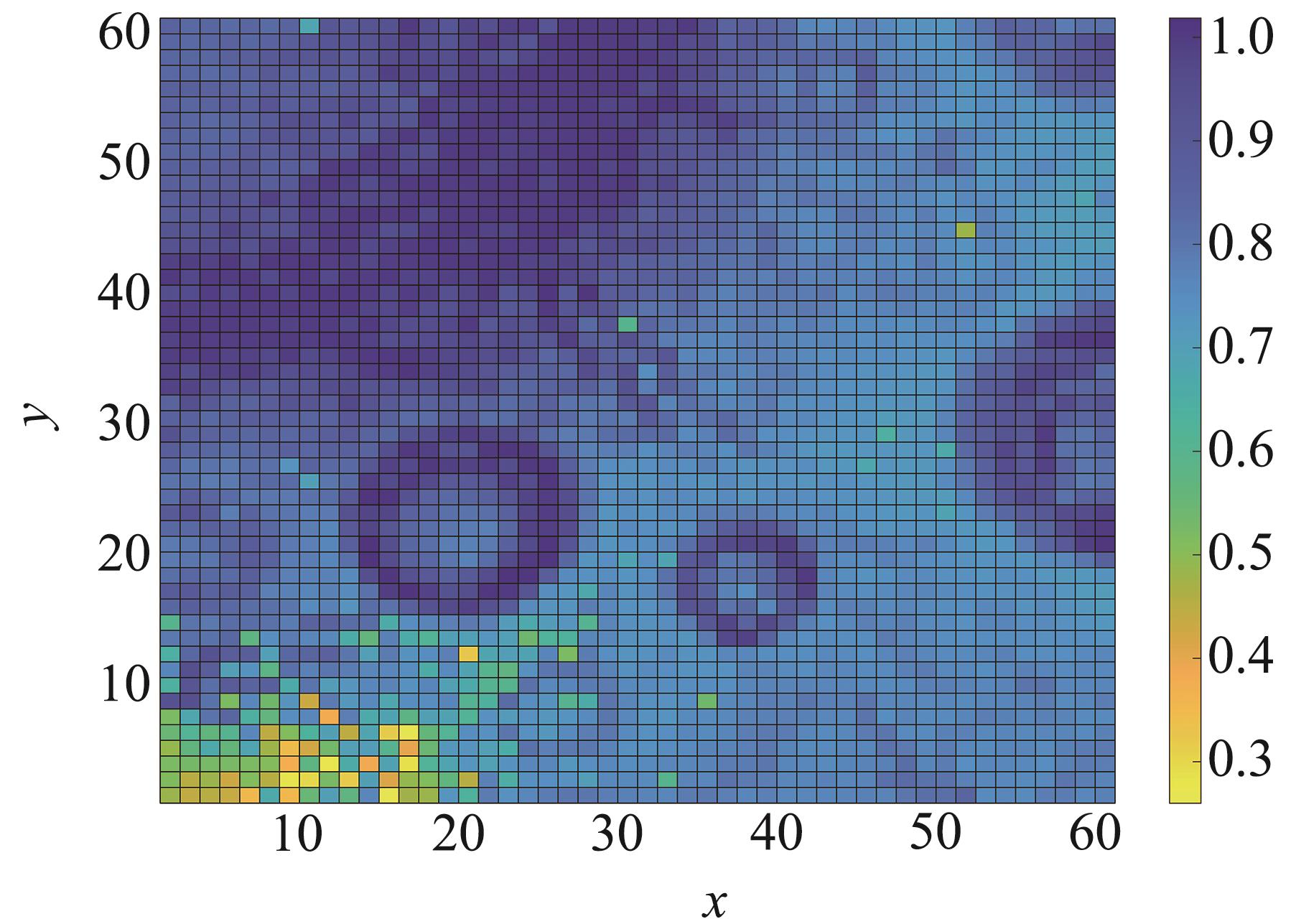
表1
地形可通行性分析参数
| 主要参数 | 量值 |
|---|---|
| 最大安全坡度角/(°) | 30 |
| 最大越障高度/m | 1 |
| 0.4 | |
| 0.3 | |
| 0.3 |
表2
全局路径规划参数
| 主要参数 | 量值 |
|---|---|
| 学习率 | 0.2 |
| 折扣因子 | 0.99 |
| 贪婪系数 | 0.9 |
| 最大训练次数 | 2 000 |
| 每次训练的最大步数 | 3 721 |
| 禁区距离阈值 | 10 |
| -1 000 | |
| 1 000 | |
| -1 |
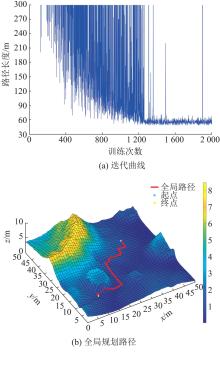
图9
传统算法Q-learning
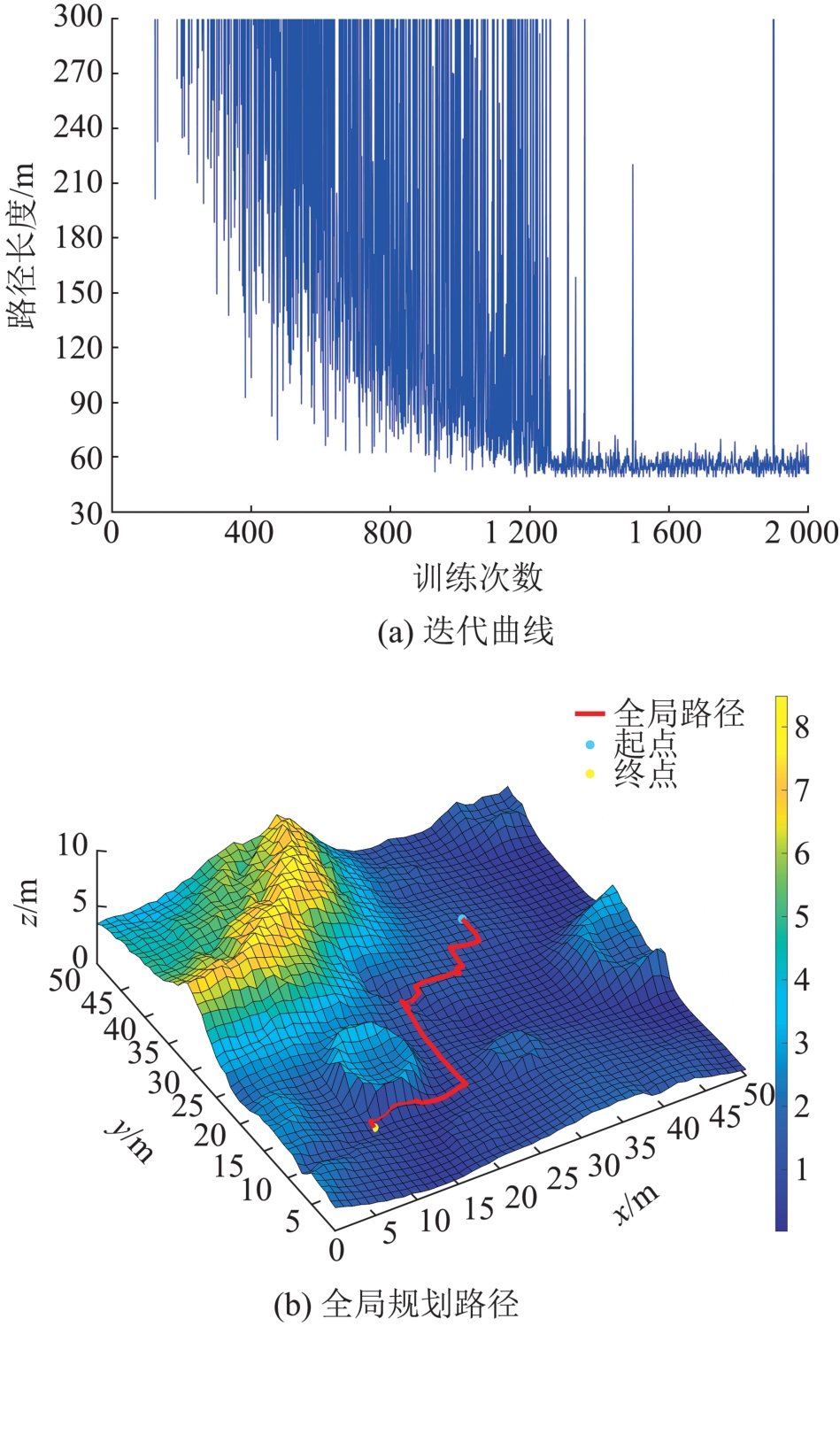
图10
无退回机制的改进Q-learning算法
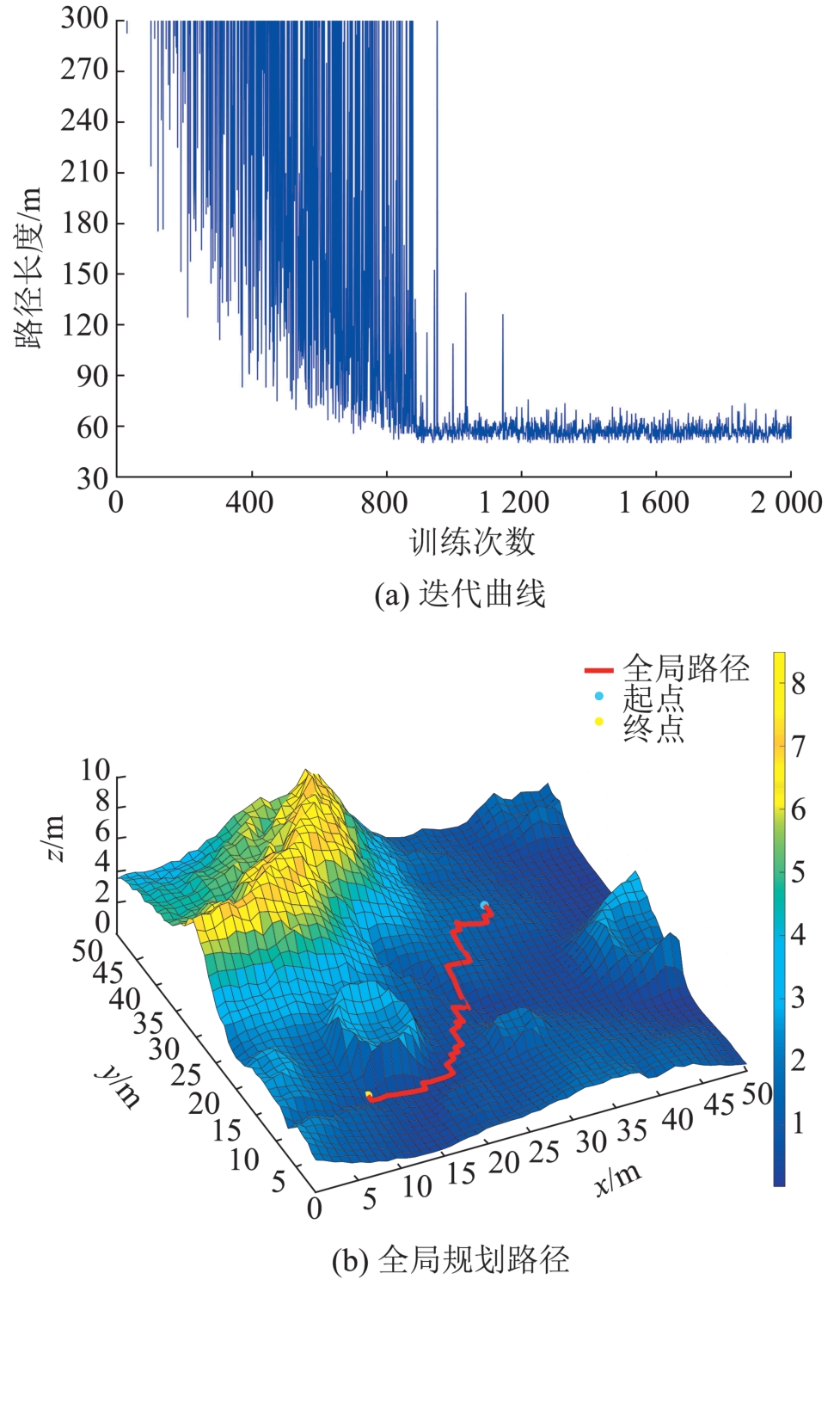
图11
有退回机制的改进Q-learning算法
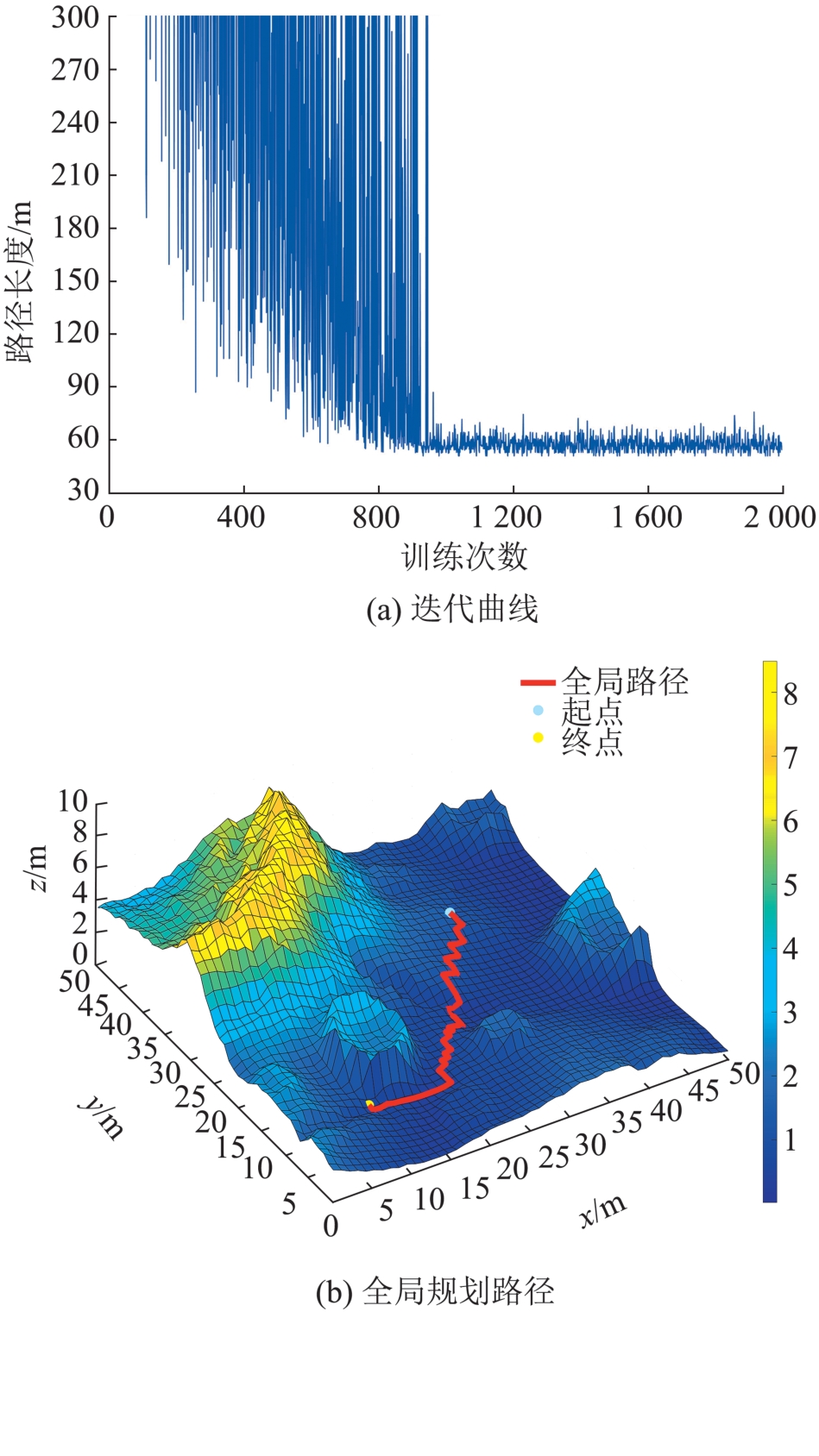
表3
全局路径规划指标对比
| 指标 | 传统Q-learning算法 | Q-learning+ 三级奖励机制 | Q-learning+三级奖励机制+退回机制 |
|---|---|---|---|
| 路径安全性 | 0.14 | 0.25 | 0.21 |
| 路径长度/m | 48.421 8 | 47.960 7 | 47.991 4 |
| 运行时间/s | 125.33 | 1 969.40 | 1 843.20 |
图12
对比实验Ⅰ
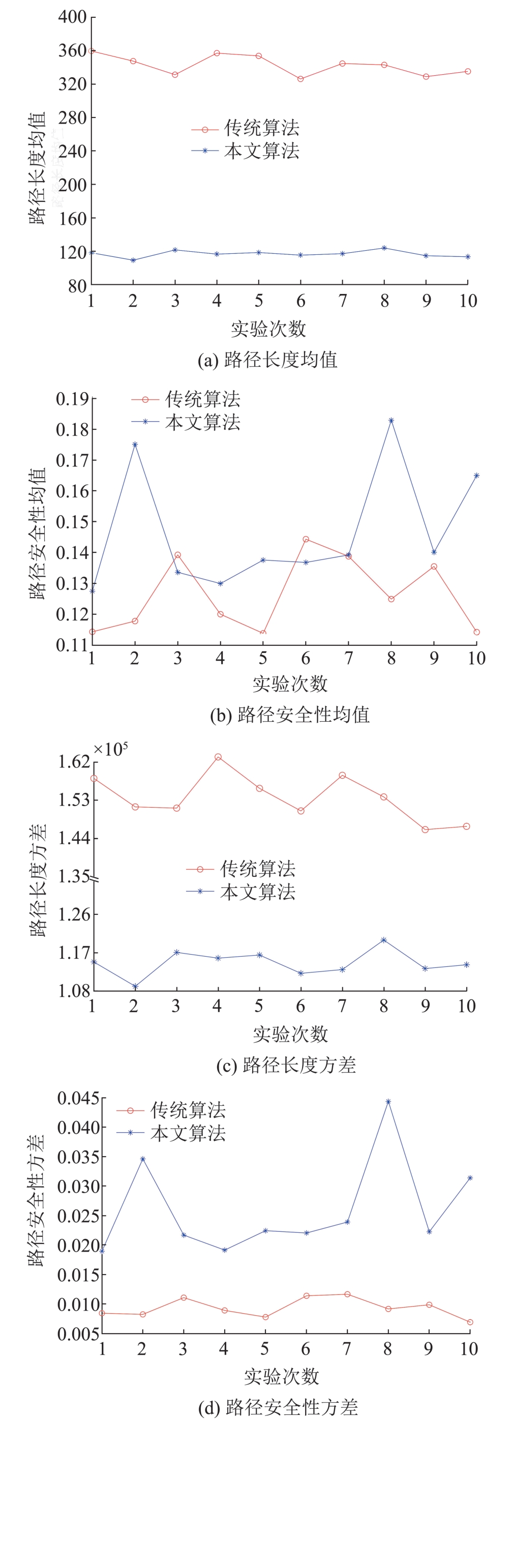
表4
局部路径规划参数
| 主要参数 | 量值 | 主要参数 | 量值 |
|---|---|---|---|
| 100 | 0.005 | ||
| 0.3 | 0.4 | ||
| 0.3 | 0.25 | ||
| 3.5 | 0.1 | ||
| 10 | 0.003 |
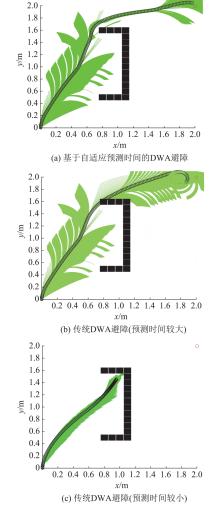
图13
对比实验Ⅱ
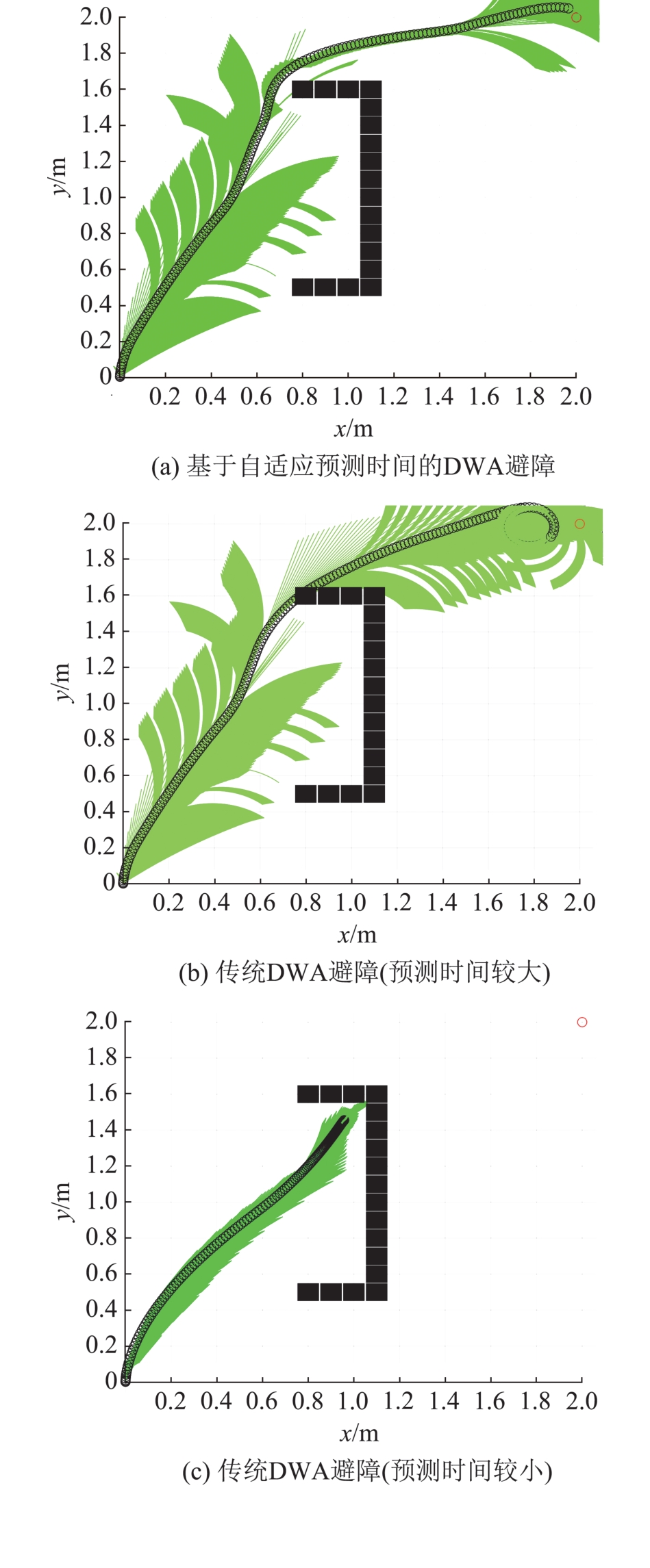
图14
对比实验Ⅲ
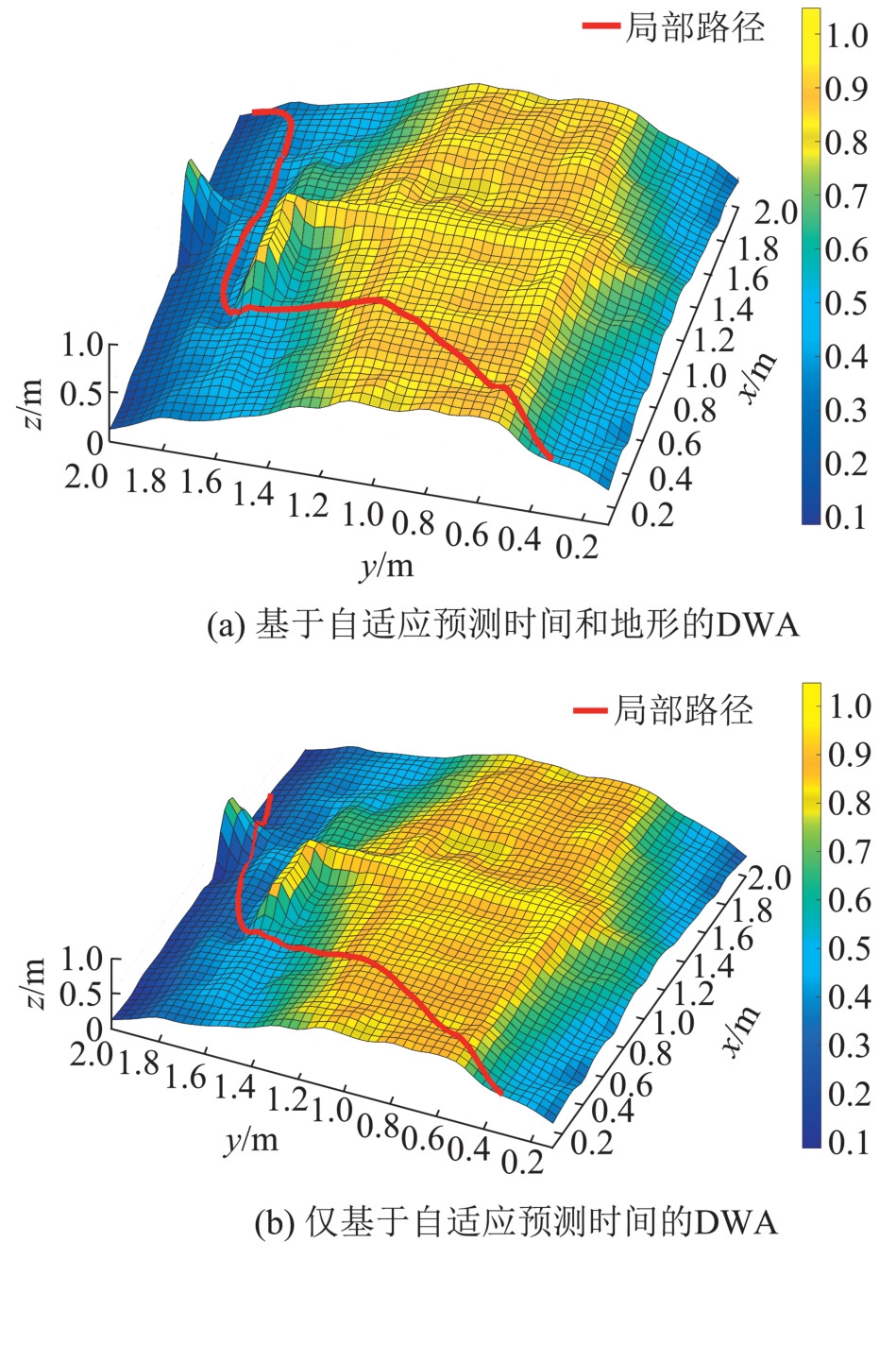
图15
基于滑移预测的双层路径规划
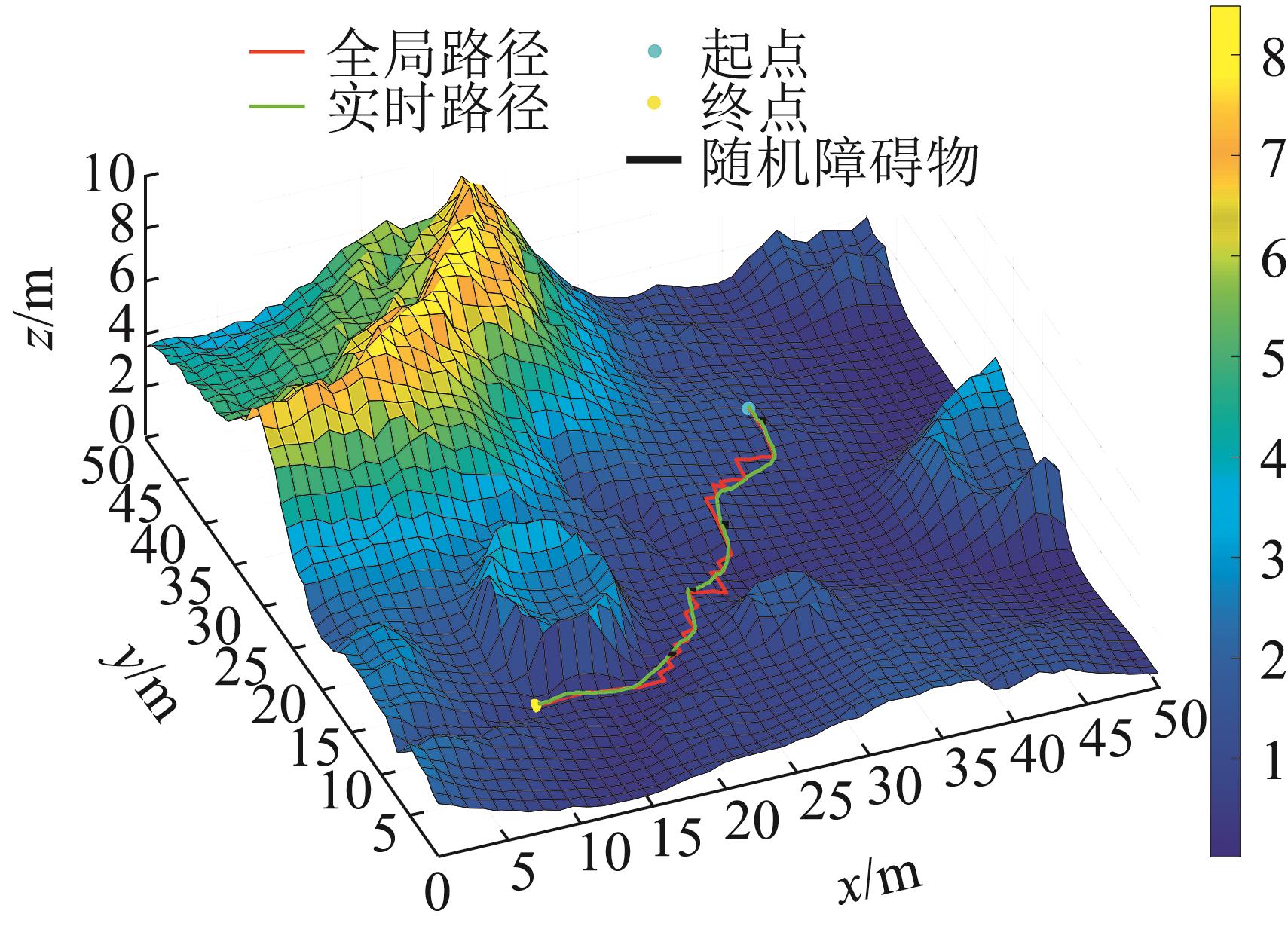
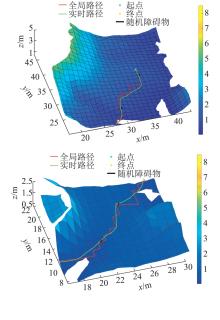
图16
双层路径规划局部图
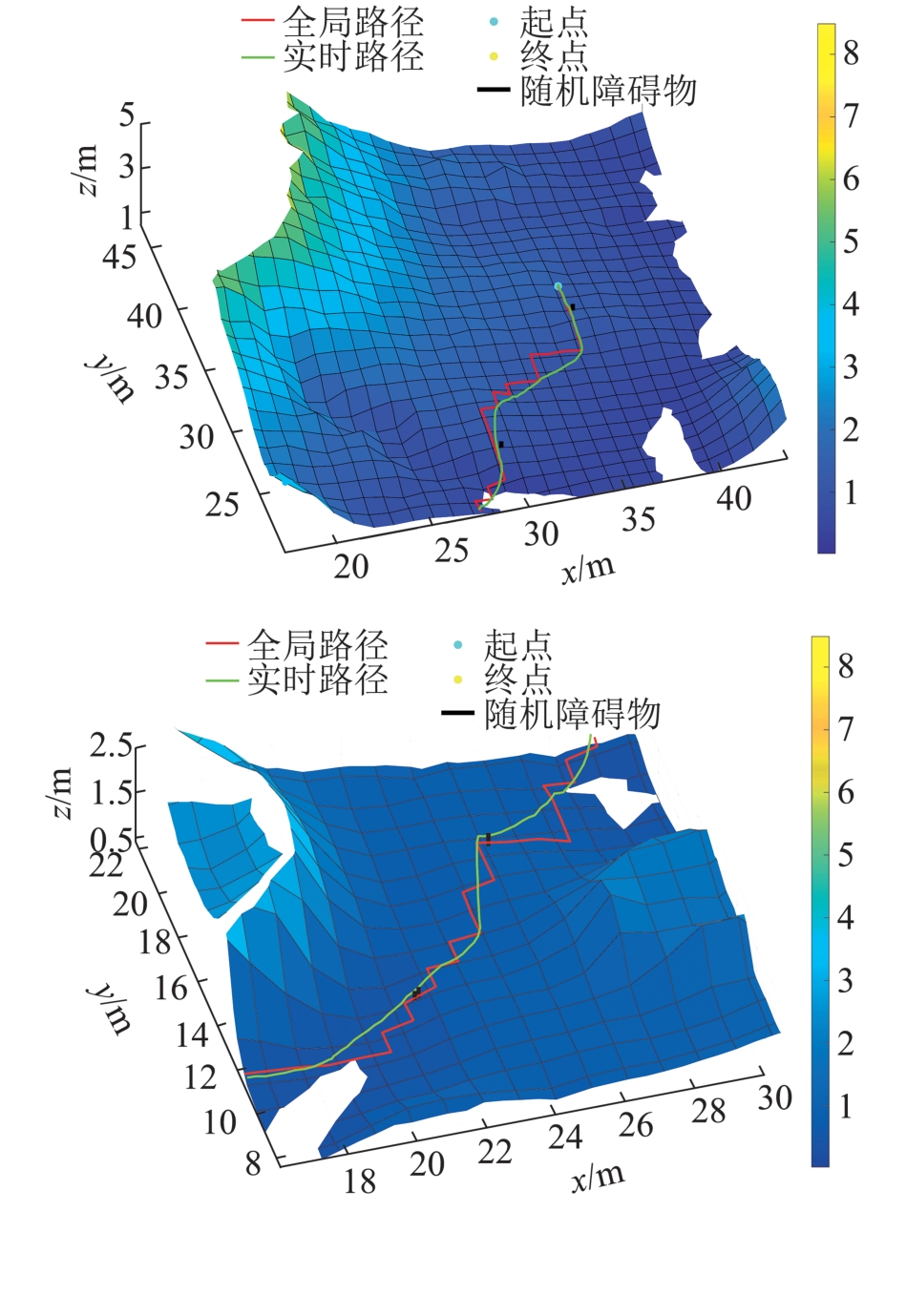
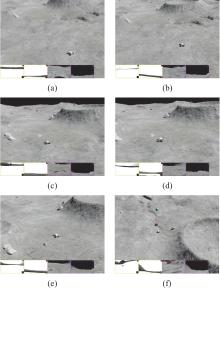
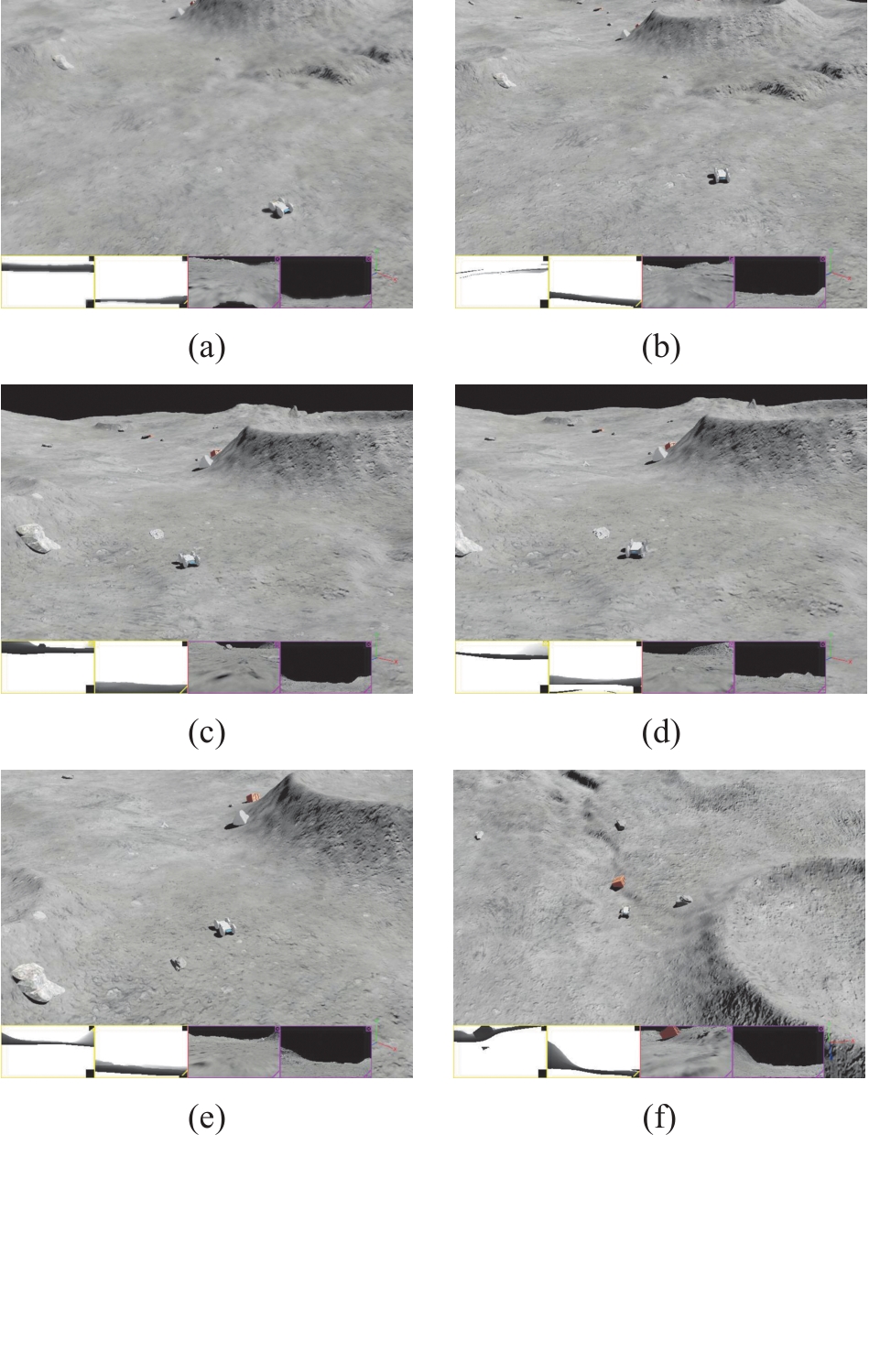
图17
虚拟环境测试实验
| 1 | 李晓婉, 成芳, 赵航, 等. 月球导航的卫星可见性及信号强度分析[J]. 测绘科学, 2022, 47(7): 14-20. |
| Li Xiaowan, Cheng Fang, Zhao Hang, et al. Analysis on Visibility and Signal Strength of Satellite for Lunar Navigation[J]. Science of Surveying and Mapping, 2022, 47(7): 14-20. | |
| 2 | 张天翼. 面向在轨应用的火星车滑移行为研究[D]. 长春: 吉林大学, 2022. |
| Zhang Tianyi. Research on Slip Behavior of Mars Rover for On-orbit Application[D]. Changchun: Jilin University, 2022. | |
| 3 | 马浩. 基于视觉的月球/火星车滑移率预测研究[D]. 北京: 中国科学院大学(中国科学院遥感与数字地球研究所), 2019. |
| Ma Hao. Vision Based Lunar/Mars Rover Slip Prediction Research[D]. Beijing: University of Chinese Academy of Sciences(Institute of Remote Sensing and Digital Earth, Chinese Academy of Sciences), 2019. | |
| 4 | 邢琰, 刘祥, 滕宝毅, 等. 月球表面巡视探测自主局部避障规划[J]. 控制理论与应用, 2019, 36(12): 2042-2046. |
| Xing Yan, Liu Xiang, Teng Baoyi, et al. Autonomous Local Obstacle Avoidance Path Planning of Lunar Surface Exploration Rovers[J]. Control Theory & Applications, 2019, 36(12): 2042-2046. | |
| 5 | 周兰凤, 杨丽娜, 方华. 基于滑移预测的月球车路径规划研究[J]. 计算机应用与软件, 2019, 36(11): 47-50. |
| Zhou Lanfeng, Yang Lina, Fang Hua. Lunar Rover Path Planning Based on Slip Prediction[J]. Computer Applications and Software, 2019, 36(11): 47-50. | |
| 6 | 成毅. 基于DEM的三维地形建模及集输管道路径优化研究[D]. 大庆: 东北石油大学, 2019. |
| Cheng Yi. Research on 3D Terrain Modeling Based on DEM and Path Optimization of Gathering Pipeline[D]. Daqing: Northeast Petroleum University, 2019. | |
| 7 | Hu Jiaming, Hu Yuhui, Lu Chao, et al. Integrated Path Planning for Unmanned Differential Steering Vehicles in Off-road Environment with 3D Terrains and Obstacles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(6): 5562-5572. |
| 8 | Zhang Wei, Wang Naixin, Wu Wenhua. A Hybrid Path Planning Algorithm Considering AUV Dynamic Constraints Based on Improved A* Algorithm and APF Algorithm[J]. Ocean Engineering, 2023, 285, Part 1: 115333. |
| 9 | Liu Chao, Wu Lei, Xiao Wensheng, et al. An Improved Heuristic Mechanism Ant Colony Optimization Algorithm for Solving Path Planning[J]. Knowledge-Based Systems, 2023, 271: 110540. |
| 10 | Yang Hui, Qi Jie, Miao Yongchun, et al. A New Robot Navigation Algorithm Based on a Double-layer Ant Algorithm and Trajectory Optimization[J]. IEEE Transactions on Industrial Electronics, 2019, 66(11): 8557-8566. |
| 11 | Ning Xuefeng, Li Yuanjia, Liu Zehuai. Improved Genetic Algorithm-based Obstacle Avoidance Path Planning Method for Inspection Robots[C]//2023 2nd International Symposium on Control Engineering and Robotics (ISCER). Piscataway: IEEE, 2023: 346-350. |
| 12 | Qi Jie, Yang Hui, Sun Haixin. MOD-RRT*: A Sampling-based Algorithm for Robot Path Planning in Dynamic Environment[J]. IEEE Transactions on Industrial Electronics, 2021, 68(8): 7244-7251. |
| 13 | Chi Wenzheng, Ding Zhiyu, Wang Jiankun, et al. A Generalized Voronoi Diagram-based Efficient Heuristic Path Planning Method for RRTs in Mobile Robots[J]. IEEE Transactions on Industrial Electronics, 2022, 69(5): 4926-4937. |
| 14 | Ee Soong Low, Ong Pauline, Cheng Yee Low, et al. Modified Q-learning with Distance Metric and Virtual Target on Path Planning of Mobile Robot[J]. Expert Systems with Applications, 2022, 199: 117191. |
| 15 | Ee Soong Low, Ong Pauline, Cheng Yee Low. A Modified Q-learning Path Planning Approach Using Distortion Concept and Optimization in Dynamic Environment for Autonomous Mobile Robot[J]. Computers & Industrial Engineering, 2023, 181: 109338. |
| 16 | Kobayashi Masato, Zushi Hiroka, Nakamura Tomoaki, et al. Local Path Planning: Dynamic Window Approach with Q-learning Considering Congestion Environments for Mobile Robot[J]. IEEE Access, 2023, 11: 96733-96742. |
| 17 | Hun Lee Dhong, Sang Su Lee, Choon Ki Ahn, et al. Finite Distribution Estimation-based Dynamic Window Approach to Reliable Obstacle Avoidance of Mobile Robot[J]. IEEE Transactions on Industrial Electronics, 2021, 68(10): 9998-10006. |
| 18 | 王旭扬, 梁志伟, 高翔, 等. 基于改进DWA算法的足球机器人局部轨迹规划[J]. 国外电子测量技术, 2023, 42(8): 1-9. |
| Wang Xuyang, Liang Zhiwei, Gao Xiang, et al. Local Trajectory Planning of Soccer Robot Based on Improved DWA Algorithm[J]. Foreign Electronic Measurement Technology, 2023, 42(8): 1-9. | |
| 19 | 杨海兰, 祁永强, 吴保磊, 等. 动态环境下基于忆阻强化学习的移动机器人路径规划[J]. 系统仿真学报, 2023, 35(7): 1619-1633. |
| Yang Hailan, Qi Yongqiang, Wu Baolei, et al. Path Planning of Mobile Robots Based on Memristor Reinforcement Learning in Dynamic Environment[J]. Journal of System Simulation, 2023, 35(7): 1619-1633. | |
| 20 | Pei Muleilan, An Hao, Liu Bo, et al. An Improved Dyna-Q Algorithm for Mobile Robot Path Planning in Unknown Dynamic Environment[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(7): 4415-4425. |
| 21 | 黄昱洲, 王立松, 秦小麟. 一种基于深度强化学习的无人小车双层路径规划方法[J]. 计算机科学, 2023, 50(1): 194-204. |
| Huang Yuzhou, Wang Lisong, Qin Xiaolin. Bi-level Path Planning Method for Unmanned Vehicle Based on Deep Reinforcement Learning[J]. Computer Science, 2023, 50(1): 194-204. | |
| 22 | Fox D, Burgard W, Thrun S. The Dynamic Window Approach to Collision Avoidance[J]. IEEE Robotics & Automation Magazine, 1997, 4(1): 23-33. |
| 23 | 奚玉荣. 基于单目图像的三维火星地形重构方法研究[D]. 长春: 吉林大学, 2022. |
| Xi Yurong. Research on 3D Martian Terrain Reconstruction Method Based on Monocular Image[D]. Changchun: Jilin University, 2022. | |
| 24 | 韩浦霞. 基于双目视觉的嫦娥三号月球高程值计算[D]. 天津: 天津理工大学, 2018. |
| Han Puxia. The Calculation of the Lunar Elevation Value of Chang'E3 Based on Binocular Vision[D]. Tianjin: Tianjin University of Technology, 2018. | |
| 25 | 巩绪生. 基于三维地形的人机协同路径规划[D]. 长沙: 国防科学技术大学, 2006. |
| Gong Xusheng. Human-machine Cooperation Path Planning Based on Three Dimensional Terrain[D]. Changsha: National University of Defense Technology, 2006. | |
| 26 | 郭延宁, 冯振, 马广富, 等. 行星车视觉导航与自主控制进展与展望[J]. 宇航学报, 2018, 39(11): 1185-1196. |
| Guo Yanning, Feng Zhen, Ma Guangfu, et al. Advances and Trends in Visual Navigation and Autonomous Control of a Planetary Rover[J]. Journal of Astronautics, 2018, 39(11): 1185-1196. |
| [1] | 董志明, 胡忠奇, 戴浩然, 高建成. 基于大语言模型的作战仿真想定自动化生成方法[J]. 系统仿真学报, 2026, 38(5): 1129-1145. |
| [2] | 李校男, 晁涛, 马萍, 杨明, 王玉轩. 基于期望最大化方法的非线性SSM黑箱鲁棒辨识[J]. 系统仿真学报, 2026, 38(5): 1146-1158. |
| [3] | 刘银钢, 马明, 张荣华. 基于大语言模型的兵棋推演动态任务规划[J]. 系统仿真学报, 2026, 38(5): 1187-1204. |
| [4] | 苏泓嘉, 张成, 刘飞. 基于模糊功能依赖网分析的体系效能评估方法[J]. 系统仿真学报, 2026, 38(5): 1224-1238. |
| [5] | 梅华威, 杨鹏慧, 余洋. 计及数据漂移改进PatchTST的超短期光伏功率预测[J]. 系统仿真学报, 2026, 38(5): 1239-1254. |
| [6] | 李权, 苏鹏, 万海英, 张承玺, 何志坚, 倪艺洋, 赵忠盖, 刘飞. 基于多阶段LHS-EPRCC方法的青霉素发酵过程建模[J]. 系统仿真学报, 2026, 38(5): 1255-1276. |
| [7] | 周子聪, 曾俊杰, 胡越, 朱正秋, 尹全军. 基于次优示例引导的兵棋推演多智能体强化学习方法[J]. 系统仿真学报, 2026, 38(5): 1277-1289. |
| [8] | 石敏, 郭诗盛, 王素琴, 李兆歆, 朱登明. 融合物理与几何先验的无抓取标注6-DoF抓取检测方法[J]. 系统仿真学报, 2026, 38(5): 1290-1302. |
| [9] | 姜彦吉, 肖星佚, 董浩, 于淼, 黄金山, 刘大千, 费博雯. 融合点线特征的图关系优化3D车道线检测方法[J]. 系统仿真学报, 2026, 38(5): 1303-1319. |
| [10] | 张鑫, 张平, 张琛, 刘威, 韩博阳. 非均质土壤条件下挖掘阻力计算模型研究[J]. 系统仿真学报, 2026, 38(5): 1320-1332. |
| [11] | 王伟, 刘东, 崔新豪, 李博, 肖依永, 任羿. 复杂项目多级动态挣值管理数字化模型及应用[J]. 系统仿真学报, 2026, 38(5): 1350-1364. |
| [12] | 彭莉峻, 苏庭琪, 刘沛津, 何林, 周协武, 张闽心. 融合人体关键点的实验室PPE规范穿戴检测方法[J]. 系统仿真学报, 2026, 38(5): 1365-1382. |
| [13] | 滕靖, 童文聪, 张中杰, 姚幸, 李君羡. 有轨电车交叉口速度自动引导方法及仿真评价[J]. 系统仿真学报, 2026, 38(5): 1426-1439. |
| [14] | 蒋圣超, 裴云庆, 翟宏营, 吴国键, 高放. 基于块编码绝热量子牛顿‒拉夫逊法的潮流计算[J]. 系统仿真学报, 2026, 38(5): 1453-1465. |
| [15] | 秦浪, 谢嘉成, 乔晓军, 王学文, 肖智杰. 执行器位姿异常的机器人轨迹规划调整方法[J]. 系统仿真学报, 2026, 38(5): 1466-1483. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
