



0 引言
伴随着科学技术的快速发展,无人机的使用模式正由单一平台逐步发展为更灵活的多平台(有人/无人、无人/无人、无人集群)协同工作方式[1]。多无人机系统,通过相互的能力互补和行动协调,能够扩展单架无人机的任务能力,提升整体作战效能,体现出了巨大的优越性和应用潜力。
区块链是一项新兴的前沿技术,被认为是对未来影响最大的“黑科技”之一[9]。区块链系统与多无人机系统同为分布式自组织系统的本质一致性,为基于区块链技术解决多无人机自主协同控制问题提供了启示。一方面,利用区块链所具有的安全特性,可以有效应对无人机系统遇到的单点失效、网络攻击等信息安全威胁;另一方面,区块链系统中基于智能合约的分布式协作技术,可以为多无人机自主协同控制的各项关键技术提供统一的底层技术平台。
本文以多无人机协同任务分配问题为研究对象,提出并实现了一种基于区块链技术的多无人机系统在线任务规划方法,开发了仿真实验验证系统,并针对一个典型的海洋常规潜艇搜捕应用场景进行了仿真验证。
1 问题描述
多无人机协同任务分配是发挥多无人机系统优势,使任务复杂性与无人机能力之间保持良好协调性所必须解决的关键问题[10]。多无人机协同任务分配主要研究在满足平台、资源、时间等约束条件下,如何优化配置多无人机及武器装备以达到整体作战效能最优,这是一类复杂的组合优化问题。面对复杂多变的外界环境,分布式在线任务分配充分利用各结点的计算能力,通过结点间的实时交互和协商来完成动态任务分配,能够避免集中式求解框架下中央结点计算负荷大、系统鲁棒性差等缺陷,成为目前的主流解决方案。
2 基于区块链的多无人机系统任务分配
多无人机系统协同执行任务的过程为:多无人机系统之间构建信息互联互通的网络,然后根据多个任务目标,自主协商选择最合适的无人机执行相关任务,进而实现多无人机间多目标协同分配。本文提出了一种基于区块链技术构建多无人机系统分布式在线实时任务分配的技术方案。
如图1所示,所有无人机结点通过无线网络相互连接,每个结点上运行区块链软件并保存有本地账本,结点间通过区块链进行信息交互。
图1
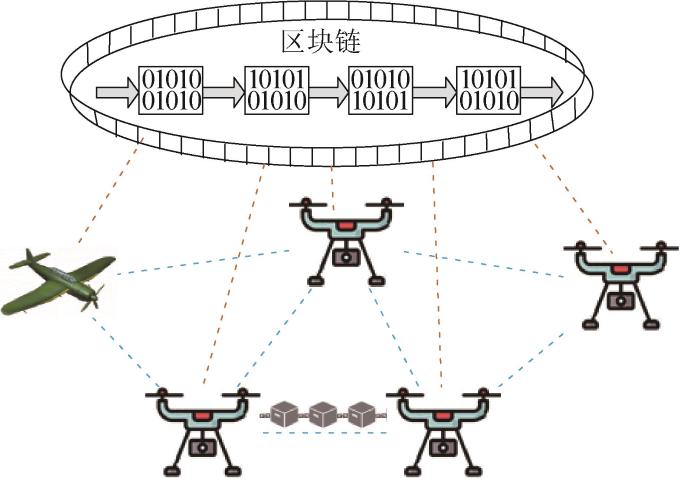
图1
基于区块链的多无人机系统任务分配示意图
Fig. 1
Schematic diagram of task allocation of multi-UAV system based on blockchain
该技术方案主要特点是:①区块链技术通过块链式结构可以为多无人机系统的通信和控制提供安全、可靠的信息传输通道,解决信息的安全性难题;②区块链技术通过共识算法为多无人机系统提供了一致的全局信息视图,解决了多智能体系统中信息的一致性难题;③区块链技术通过智能合约提供了一个无中心的协作平台,各无人机结点可以进行合作、竞争,共同完成复杂的在线实时任务分配计算工作和战术任务。
2.1 技术架构
基于区块链技术的多无人机系统分布式在线实时任务分配的技术架构由硬件层、区块链层、智能合约层和应用层等四层组成。如图2所示。
图2
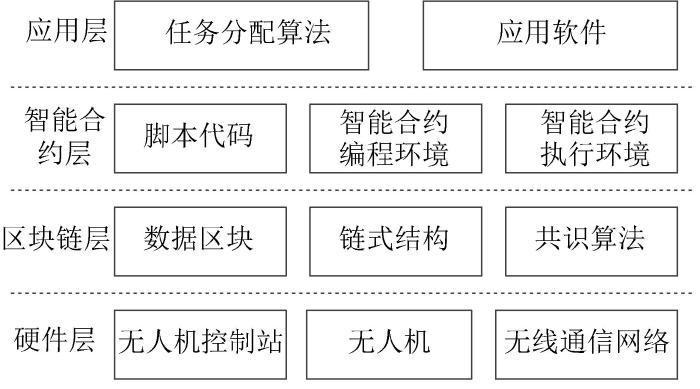
图2
基于智能合约的多无人机任务分配技术架构
Fig. 2
Multi-UAV task allocation technology architecture based on smart contract
硬件层:包括无人机控制站、无人机和无线通信网络。无人机控制站和无人机都是系统的一个结点,并通过无线通信网络相互连接。操作员通过控制站发布控制命令,并接收无人机的命令响应和任务执行结果。
区块链层:由区块链的关键技术,如数据区块、链式结构、共识算法等组成,为无人机系统提供可信、安全的信息服务。无人机控制站和无人机都是区块链系统上的一个结点,部署有相同的区块链软件和算法。
智能合约层:由脚本代码、智能合约的编程和执行环境等组成,为无人机系统的自主协同任务分配提供开发平台和运行环境支持。多无人机任务分配算法被编译成脚本代码以智能合约形式部署于区块链系统上,并在执行环境中运行。
应用层:则由多无人机任务分配算法和应用软件组成,实现多无人机系统的自主协同任务分配,并与无人机的飞控系统、任务系统等相连接,共同完成战术任务。
2.2 系统共识
无人机和无人机控制站构成的区块链系统包括若干任务结点、若干验证结点和一个记账结点。如图3所示,在智能合约执行过程中,任务结点提交执行智能合约的请求;验证结点对请求进行验证,模拟执行智能合约,将验证结果和模拟执行结果进行数字签名后返回给请求结点;任务结点收集够验证信息后,打包发送给记账结点;记账结点对任务结点的请求进行排序,产生、广播新区块。验证结点和记账结点由区块链的共识算法产生。系统中的一个结点可以担任上述的一种或多种角色。
图3
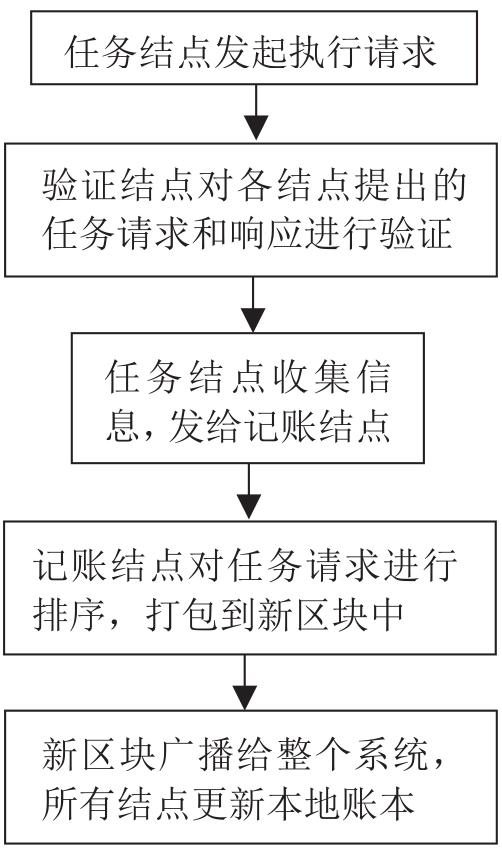
在上述智能合约的执行过程中,智能合约的相关数据通过非对称密钥加密算法和数字签名算法进行加密后以数据区块的形式存储在系统上,并通过链式结构和分布式存储保证数据不被篡改。部分无人机结点被网络攻击或单点失效都无法对系统造成实质性影响。当验证结点或记账结点被发现数据不一致或无法联系等单点失效时,区块链系统通过自带的共识算法(如工作量证明机制、权益证明机制、股份授权证明机制等)重新选举新结点承担智能合约执行过程。当任务结点出现单点失效时,则由任务分配算法重新分配任务给其他任务结点。
2.3 任务分配
自主协同任务分配过程基于合同网算法,如图4所示,包括5个步骤:①任务发布,发布任务结点在区块链上发布一个新标书,启动招标程序;②投标,其他无人机结点在接收到新标书后,根据自己的能力和状态计算任务执行效益,并投标;③开标,发布任务结点开标,计算中标的无人机结点,公布中标者;④任务执行,中标无人机接收到中标信息后,启动新任务,并发布确认执行信息;⑤结束招标,发布任务结点结束招标程序。随着时间推移,无人机可以有多种身份,既可能是投标者或中标者,又可能是招标者。
图4
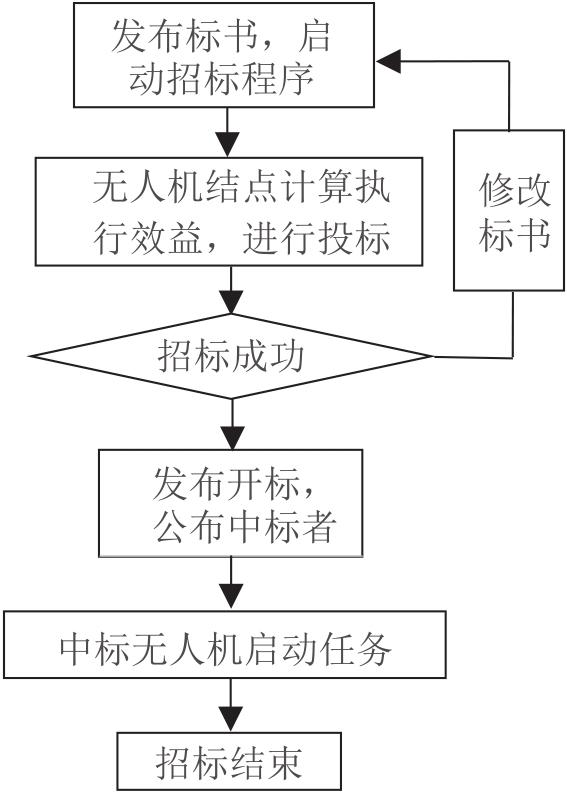
图4
基于合同网算法的任务分配过程
Fig. 4
Task allocation process based on contract network algorithm
以多无人机系统执行协同搜索任务为例,某任务结点发布协同搜索任务标书,标书上记载了搜索区域和执行搜索任务的条件(如侦察任务载荷种类及性能要求等),并被记录在区块链账本上。其他无人机结点根据标书判断自己是否具备协同搜索条件,然后计算到达协同搜索区域的航路和最快到达时间。开标时,系统根据预期到达时间顺序选取一定数量的无人机中标。中标结果被写入区块链账本中。
3 实验验证
3.1 实验系统
为验证设计方法的有效性,本文开发了一套作战仿真系统——海域态势感知仿真系统,如图5所示。基于VR-Forces开发的海域态势感知仿真系统是具备持续演进、红蓝对抗能力的群体智能仿真推演系统,能够实现红蓝双方对抗的海上态势生成、仿真推演和作战效能评估。该系统通过无人机代理模块与区块链系统连接。
图5
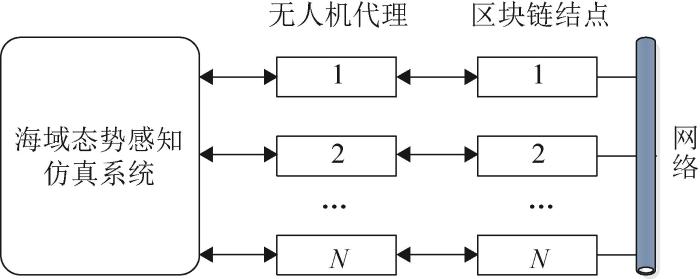
表 1 智能合约函数表
Table 1
| 函数名称 | 类型 | 描述 |
|---|---|---|
| CreateAuction() | 函数 | 创建拍卖 |
| PublishAuction() | 函数 | 发布标书 |
| QueryAuction() | 函数 | 查询拍卖 |
| CloseAuction() | 函数 | 关闭拍卖 |
| EndAuction() | 函数 | 结束拍卖 |
| SubmitBid() | 函数 | 提交标书 |
| PublishAuctionHandler() | 事件 | 发布标书 |
| CloseAuctionHandler() | 事件 | 结束拍卖 |
无人机代理模块是仿真系统与区块链系统之间的信息中介。一方面,将仿真的无人机状态数据和侦察情报报告给区块链结点,并触发智能合约的执行。另一方面,智能合约的执行结果以事件形式通知无人机代理模块,驱动仿真系统进行推演。无人机代理模块作为仿真系统的外挂,采用Visual C++语言编写。
运行时,每架无人机对应一个无人机代理模块和一个区块链结点。每个区块链结点在虚拟机中运行相同版本的 Hyperledger Fabric 软件,并通过网络连接构成一个区块链系统。区块链系统上建立了一个区块链通道(用于任务间信息隔离),参加任务的所有无人机区块链结点为该区块链通道的成员。通道内部署如表1所示的智能合约函数。
3.2 任务场景
本文以多型异构无人机系统联合搜索常规动力潜艇为典型作战场景,完成了基本的仿真实验验证。作战想定兵力如表2所示。
表 2 作战想定兵力
Table 2
| 兵力 | 实体类型 | 数量 | 说明 |
|---|---|---|---|
| 红方 | 无人机 | 25 | 1~20:磁探仪探测,探测范围600 m;21~25:红外、可见光探测,红外探测范围5 km,可见光探测范围10 km |
| 反潜直升机 | 1 | 被动浮标探测 | |
| 被动浮标 | 15 | 被动声呐探测,探测范围5 km | |
| 蓝方 | 潜艇 | 1 | |
| 中立方 | 油轮 | 1 | |
| 渔船 | 1 |
具体场景如下:
(1) 任务海域范围:50海里×50海里。
(2) 蓝方兵力:常规潜艇1艘,航行速度18 km/h,深度100 m,航行轨迹横穿正方形任务海域,有两种航行状态:通气管航行状态和潜望镜航行状态,航速航向和航行状态可设置。
(3) 红方兵力:无人机分为3个编队:1号编队共有10架,搭载磁探仪,出发起点为任务海域左下角附近;2号编队共有10架,搭载磁探仪,出发起点为任务海域右下角附近;3号编队共有5架,搭载红外传感器和可见光传感器,出发区域为任务海域底边中点附近。1、2号编队磁探无人机飞行速度90 km/h,在发现目标前各自在分配的一半海域进行搜索。3号编队光电无人机飞行速度120 km/h,按照固定路线巡逻。反潜直升机飞行速度250 km/h,出发起点为任务海域右下角外侧,投放浮标位置为正方形海域中线,投放浮标数量为15枚,投放完毕后反潜直升机以海域中心点为圆心盘旋。
(4) 中立方:油轮和渔船各1艘,作用是为了验证磁探传感器、红外可见光传感器和雷达传感器的识别能力,航迹可人为设置。
3.3 任务过程
多无人机系统在受领任务后,完成集结起飞、分配任务、执行任务、集结返航等一系列活动。在此过程中,多无人机系统无需或极少受到指挥中心的控制,在智能合约的控制之下自主进行战场感知、态势估计、任务分配、航迹规划、安全避障等过程,自适应地调整编队队形、优化任务分配和资源分配,最优完成所受领的任务。
(1) 初始任务规划
指挥中心通过控制站发布搜索任务(指定搜索区域、参与搜索任务的无人机结点)。
(2) 任务执行
各无人机结点按照指定的搜索区域和路线进行搜索。光电无人机在区域内按照预定路线巡逻,搜索通气管航行状态和潜望镜航行状态的潜艇。磁探无人机采用蚁群算法在区域内搜索潜艇。在执行任务过程中,监听智能合约事件消息,并周期性地将实时状态发布到区块链上。
(3) 任务再分配
当磁探无人机发现潜艇后,立即提交任务标书,召唤附近的磁探无人机对潜艇进行围捕。其他磁探无人机在接到标书后,计算到达目标点的距离和所用时间,进行投标。当投标无人机达到一定数量,或者一定时间延迟后,发标无人机进行开标,选出一定数量时间费用最小的无人机中标。中标无人机接受新任务,直接奔赴目标点,进行围捕。
当光电无人机发现潜艇后,采用上述类似方法召唤一定数量的磁探无人机到附近海域搜索潜艇。
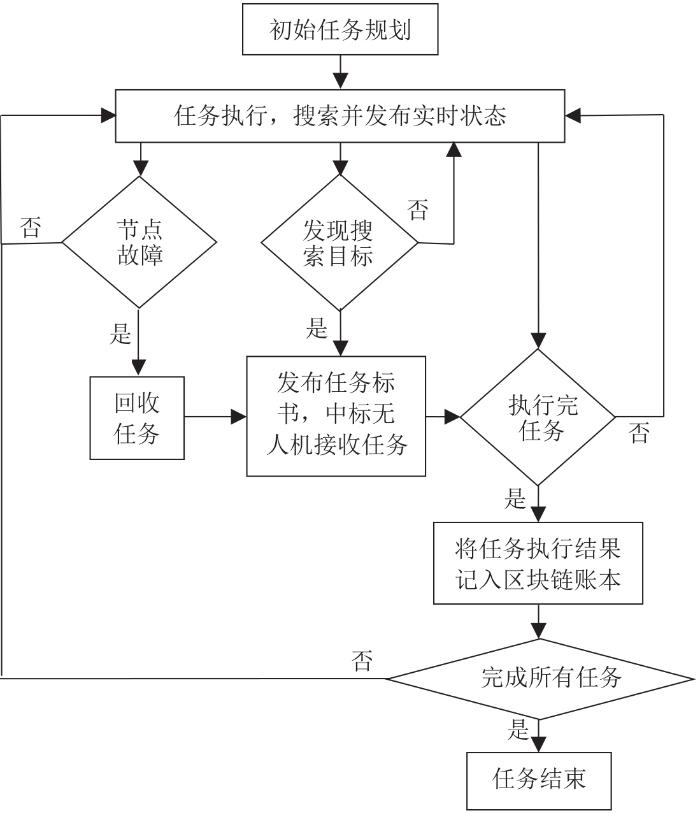
当某架无人机的任务执行状态在区块链上超过某个阈值时间未更新时,则被认为该结点故障,回收该结点的任务,运行智能合约,将该任务分配给其他无人机,某架无人机结点在执行任务结束后,将任务执行结果记入区块链账本,运行智能合约,向系统申请新任务。当所有任务执行完成后,指挥中心通过控制站确认任务执行结果,任务结束。
上述任务再分配过程,被描述为智能合约代码,其详细任务执行过程如图6所示。
图6
3.4 实验结果
图7

图8
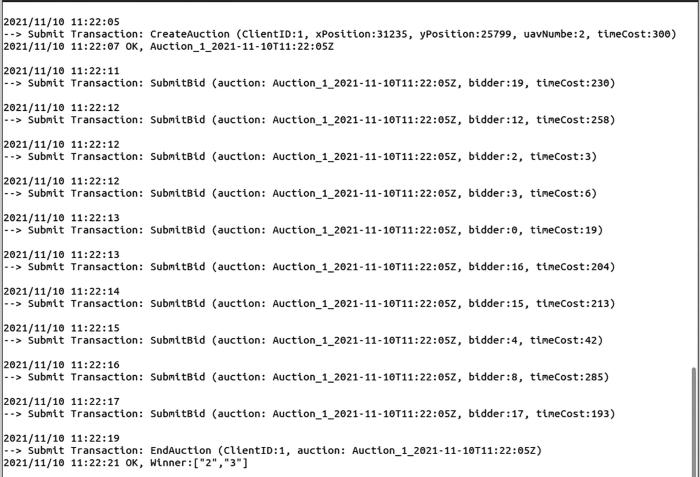
图8
任务再分配时智能合约运行日志
Fig. 8
Smart contract operation log during task redistribution
实验中采用了真实的区块链系统,20架磁探无人机参与任务再分配,进行了不少于50次实验。表3为无人机结点通过区块链系统接收任务并完成投标的响应时间分布,实验结果显示一次任务再分配时间平均小于10 s,97%的无人机能够在10 s内完成任务投标。这个响应时间是由任务招投标过程中无人机结点之间多次协商和共识决定的,能够满足设定任务场景下实时在线任务规划的需求。
表3 无人机接收任务并完成投标的响应时间分布
Table 3
| 序号 | 响应时间/s | 无人机结点占比/% |
|---|---|---|
| 1 | 6 | 78 |
| 2 | 8 | 91 |
| 3 | 10 | 97 |
| 4 | 12 | 99 |
| 5 | 14 | 100 |
本文对使用智能合约任务再分配的系统与未使用智能合约任务再分配的系统分别进行不少于50次的作战想定仿真实验。评估指标包括搜索成功概率和多次搜索成功概率,其中搜索成功概率定义为在规定时间内目标被发现并识别成功的概率,多次搜索成功概率定义为在规定时间内目标被发现并识别成功2次以上的概率。作战效能评估结果如表4所示,可以看出:使用区块链的系统,通过任务再分配智能合约召唤其他无人机对目标围捕,能够有效提升搜索成功概率和多次搜索成功概率,实现对目标的连续发现和持续跟踪,甚至能较准确预测目标行动轨迹。实验结果证实了基于区块链多无人机协同任务分配技术方案的可行性和协同方法的有效性。
表4 仿真实验结果 (%)
Table 4
| 类别 | 搜索成功 概率 | 多次搜索 成功概率 |
|---|---|---|
| 未使用任务再分配智能合约 | 62.17 | 32.21 |
| 使用任务再分配智能合约 | 94.32 | 85.34 |
4 结论
本文提出了一种基于区块链的多无人机系统自主协同任务规划技术方案,区块链技术提供了一个分布式自组织的协作平台,采用智能合约技术实现了基于合同网的任务再分配算法,并在一个典型的海洋常规潜艇搜捕场景下进行了仿真验证。实验结果证明了将任务分配算法描述为智能合约,并通过区块链系统实现多无人机系统在线实时任务分配的可行性和优越性。
参考文献
Multiple UAV Systems: A Survey
[J].
Multiple UAV Cooperative Search under Collision Avoidance and Limited Range Communication Constraints
[C]//
Task Assignment in the Cooperative Control of Multiple UAV's
[C]// AIAA Guidance, Navigation, & Control Conference & Exhibit.
Multi-UAV Cooperative Target Tracking with Bounded Noise for Connectivity Preservation
[J].
DARPA Reveals Details of CODE Program-UAS VISION
[EB/OL]. (
无人机集群组网任务分配方法研究
[J].
Research on Task Allocation Method of UAV Cluster Networking
[J].
无人-有人机协同控制关键问题
[J].
Key Problems of Unmanned-Manned-Machine Collaborative Control
[J].
无人机分布式任务规划技术研究
[D].
Research on Distributed Mission Planning Technology of Unmanned Aerial Vehicle
[D].
A Novel Hybrid Auction Algorithm for Multi-UAVs Dynamic Task Assignment
[J].
UAV Formation Shape Control Via Decentralized Markov Decision Processes
[J].
Distributed Coordinated Control Scheme of UAV Swarm Based on Heterogeneous Roles
[J].
A Blockchain Platform for the Enterprise
[CP/OL]. (


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}