

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (7): 1723-1752.doi: 10.16182/j.issn1004731x.joss.25-0230
• Invited Reviews • Previous Articles Next Articles
Liu Yongkui1, Yang Kang1, Tuo Benben1, Pan Yaduo1, Wang Xinyu1, Wang Yihan1, Gong Yongqian1, Zhang Lin2, Wang Lihui3, Lin Tingyu4, Zi Bin1, Li Yuan5, You Wei6, Xu Xun7
Received:2025-03-25
Revised:2025-05-28
Online:2025-07-18
Published:2025-07-30
CLC Number:
Liu Yongkui, Yang Kang, Tuo Benben, Pan Yaduo, Wang Xinyu, Wang Yihan, Gong Yongqian, Zhang Lin, Wang Lihui, Lin Tingyu, Zi Bin, Li Yuan, You Wei, Xu Xun. Digital Twinned Industrial Robot: Conceptual Framework, Key Technologies, and Case Study[J]. Journal of System Simulation, 2025, 37(7): 1723-1752.
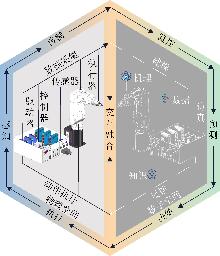
Fig. 1
Concept of DTIR
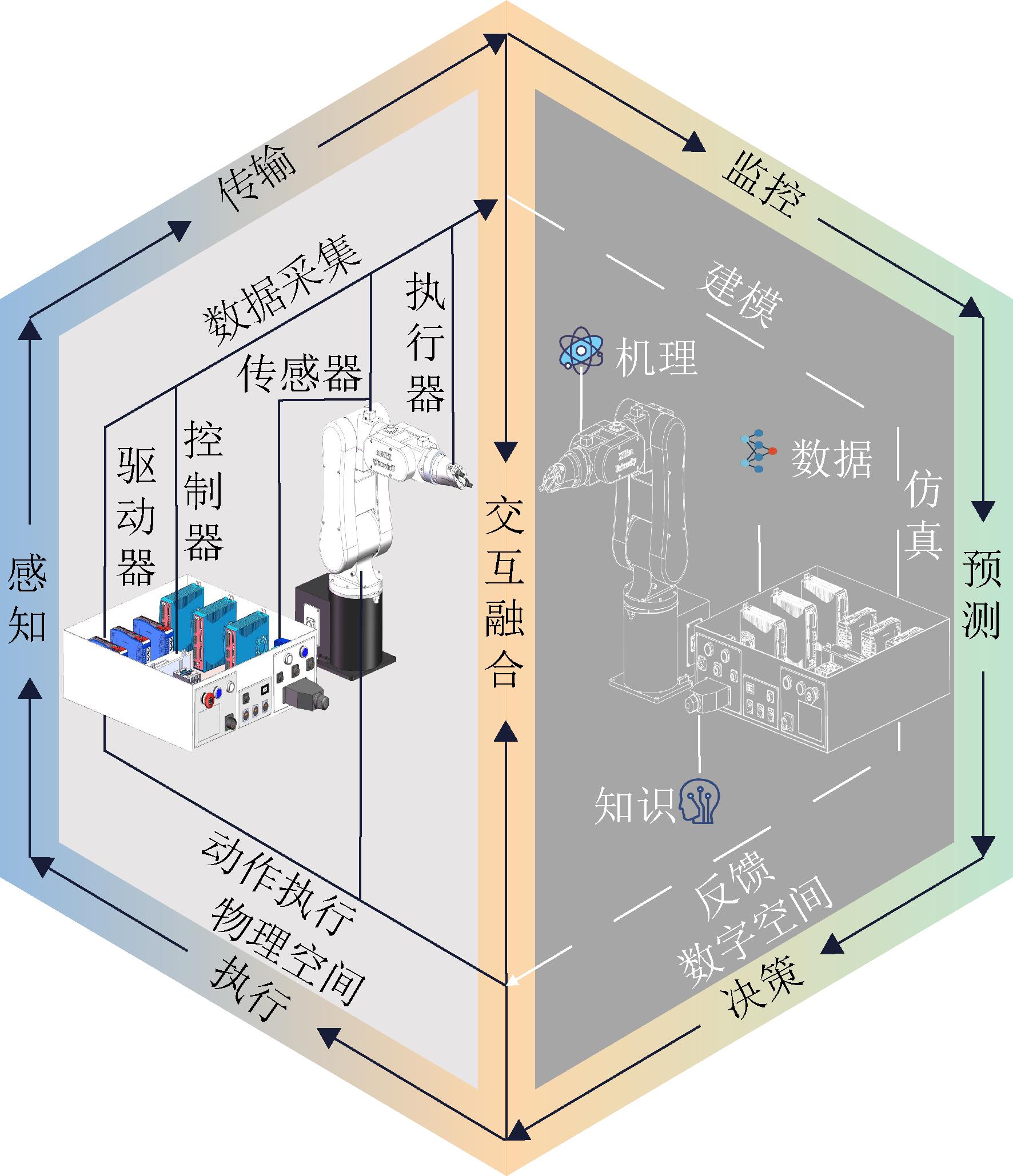
Fig. 2
Composition of DTIR
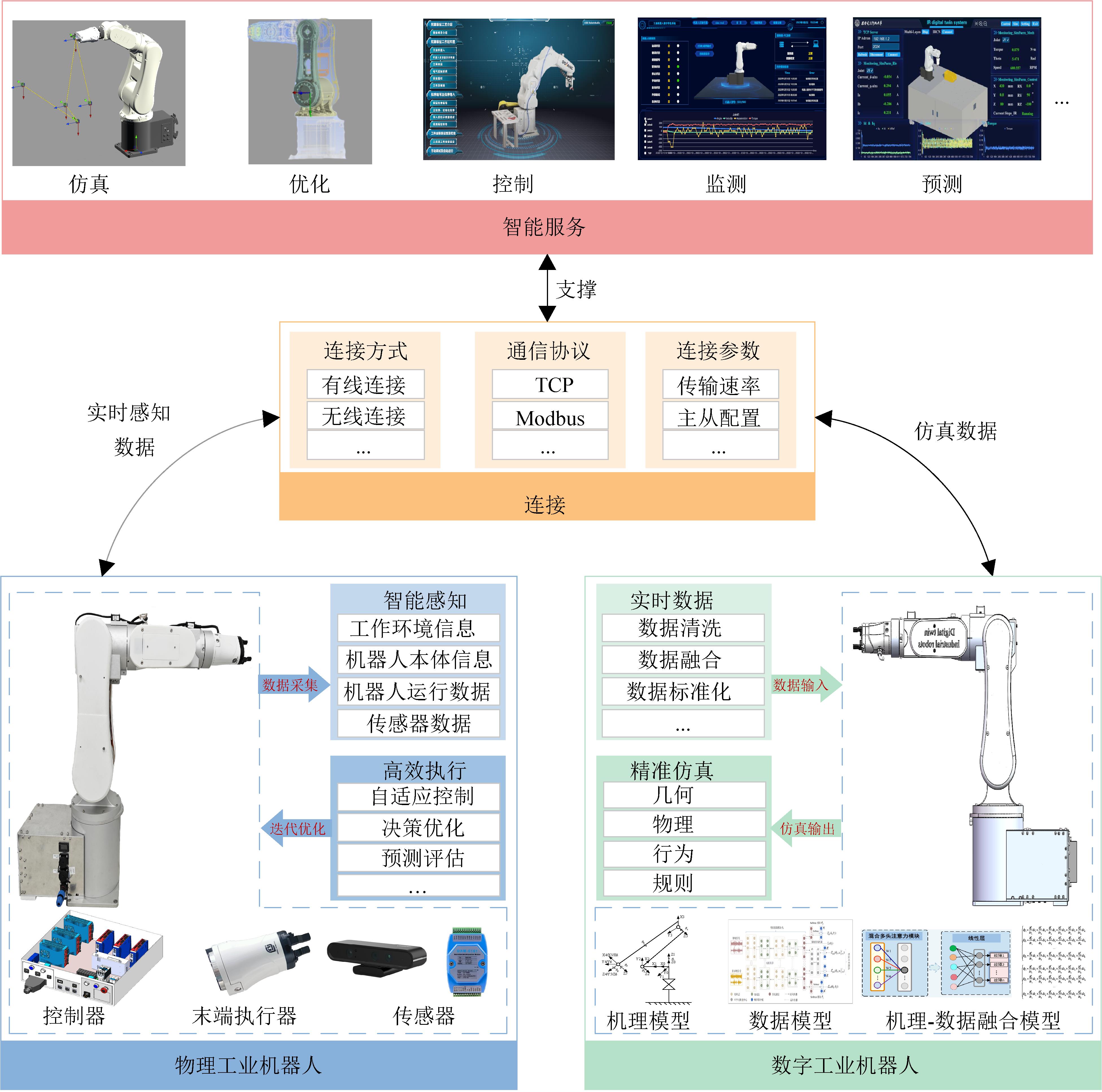
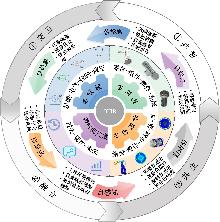
Fig. 3
Typical features of DTIR
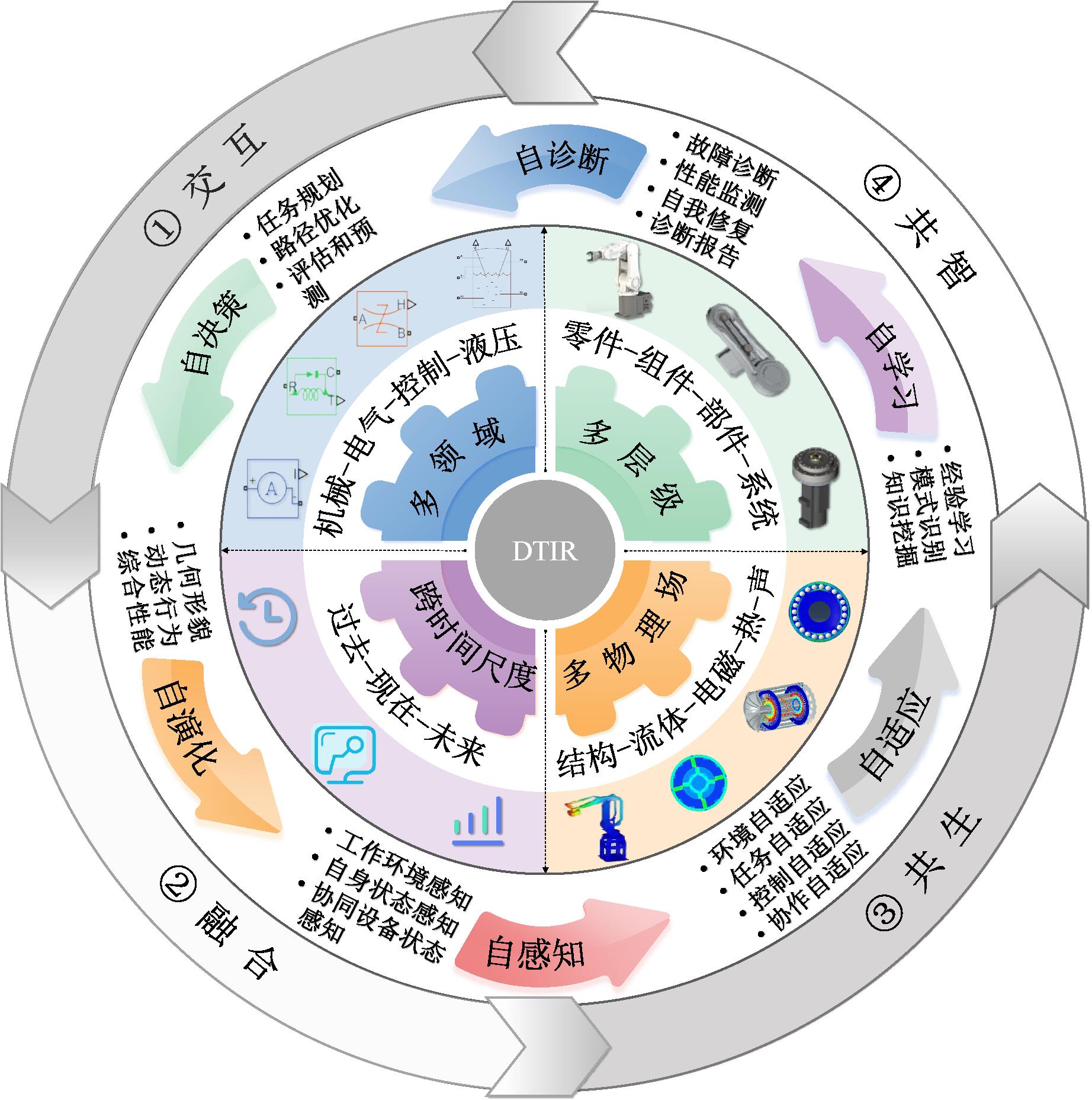
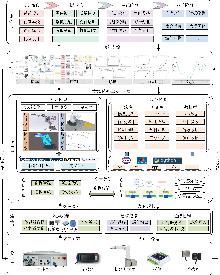
Fig. 4
System architecture of DTIR
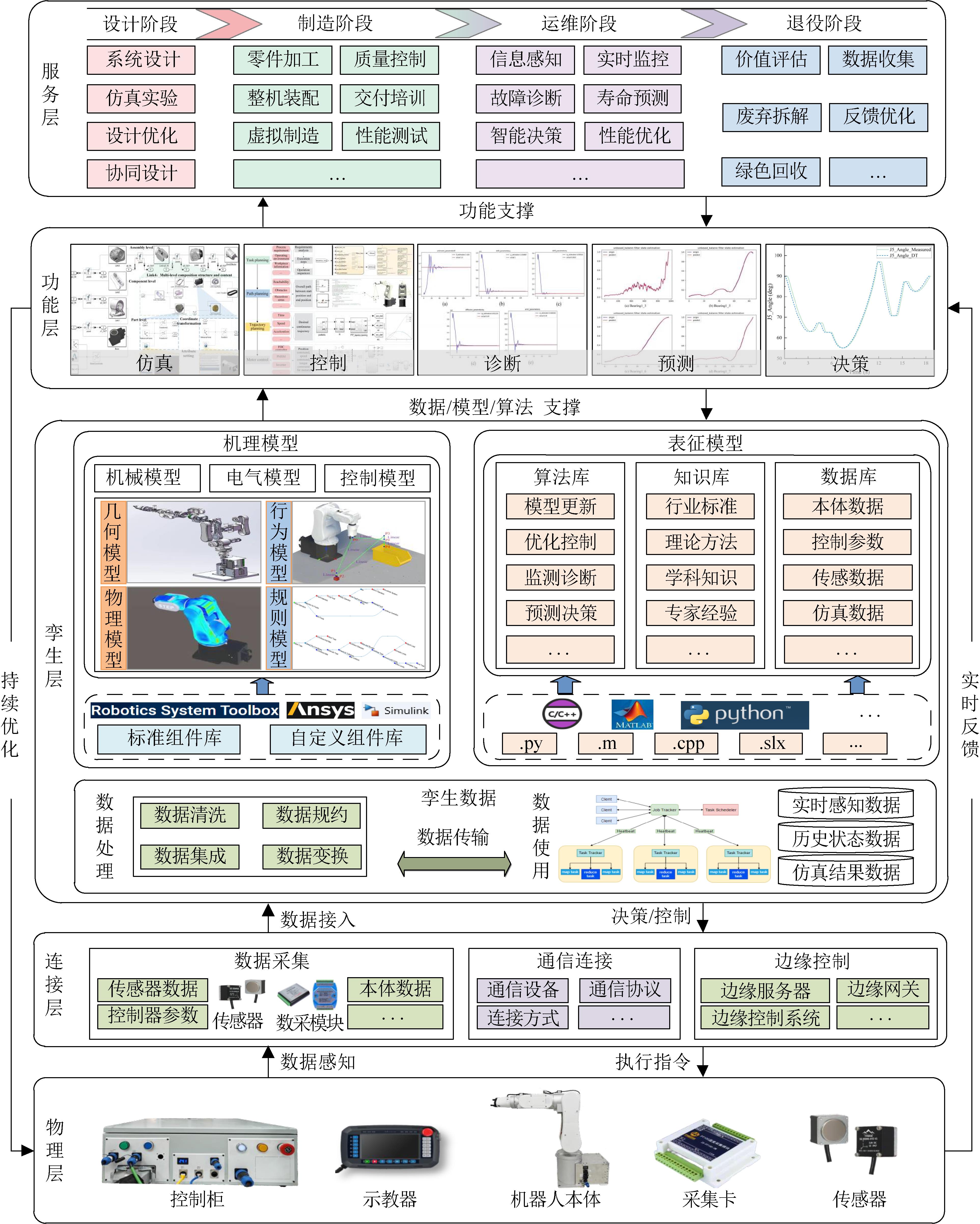

Fig. 5
Key technologies of DTIR
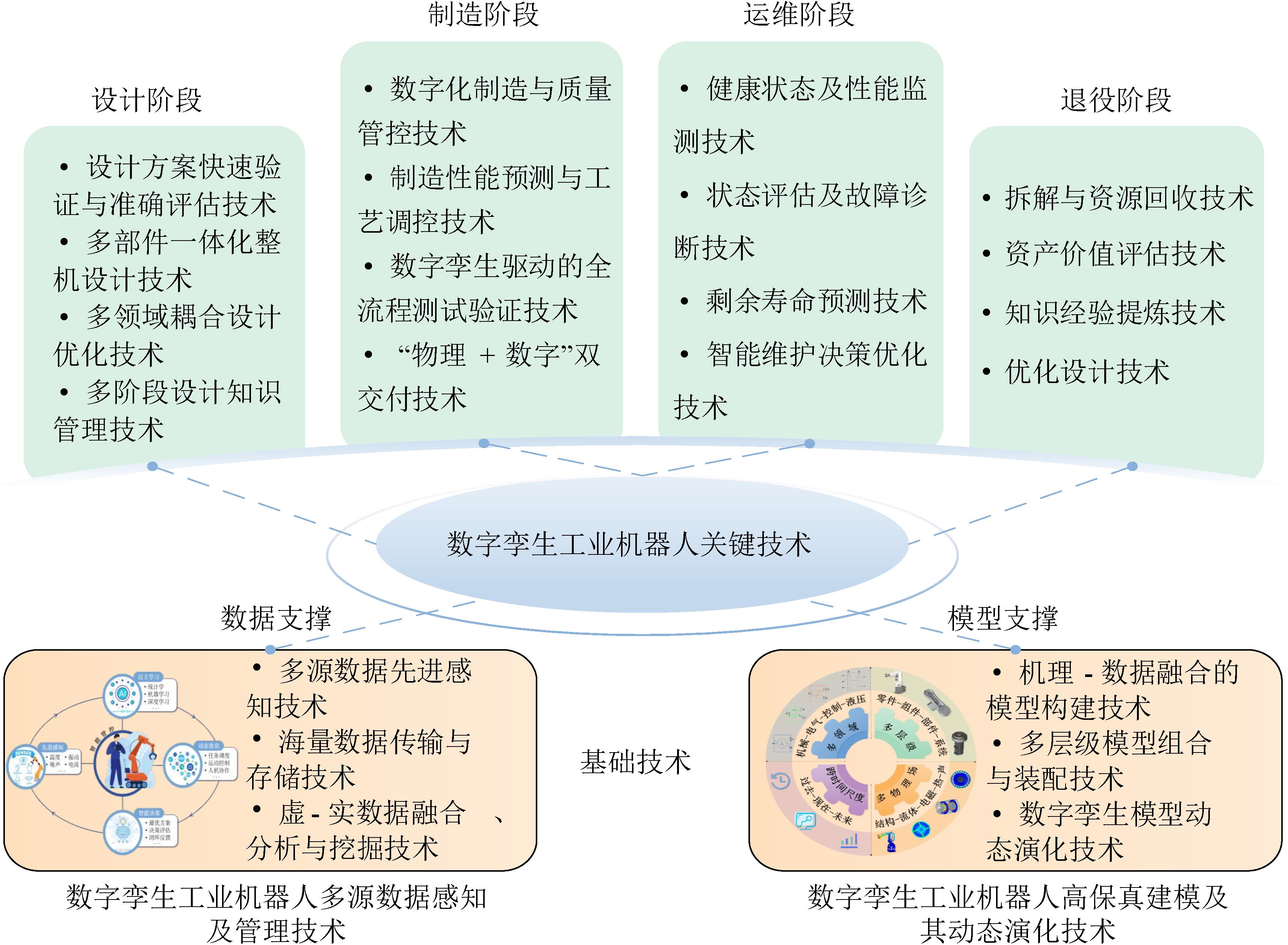

Fig. 6
Data composition of DTIR
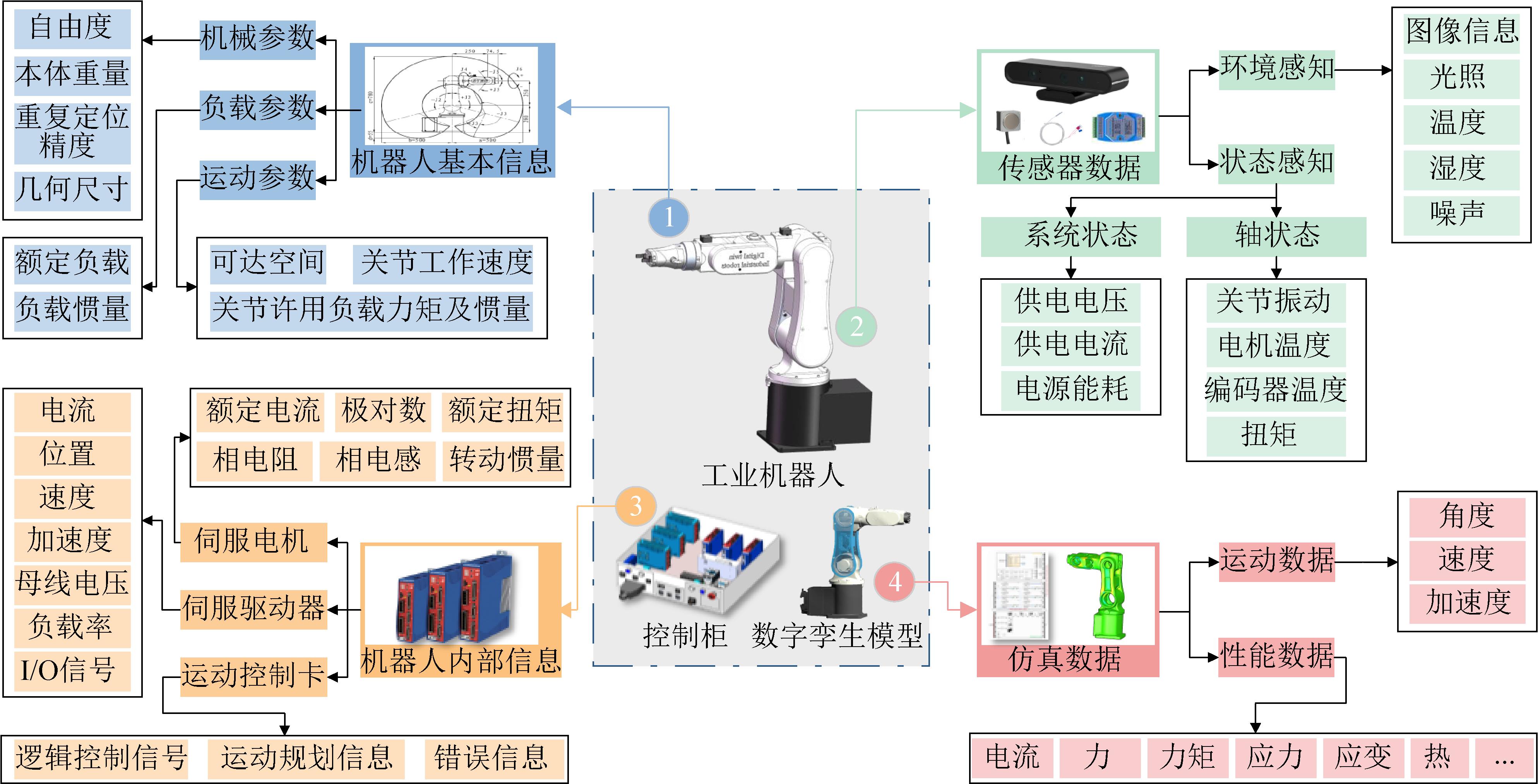
Fig. 7
High-fidelity digital twin modeling and dynamic evolution technology
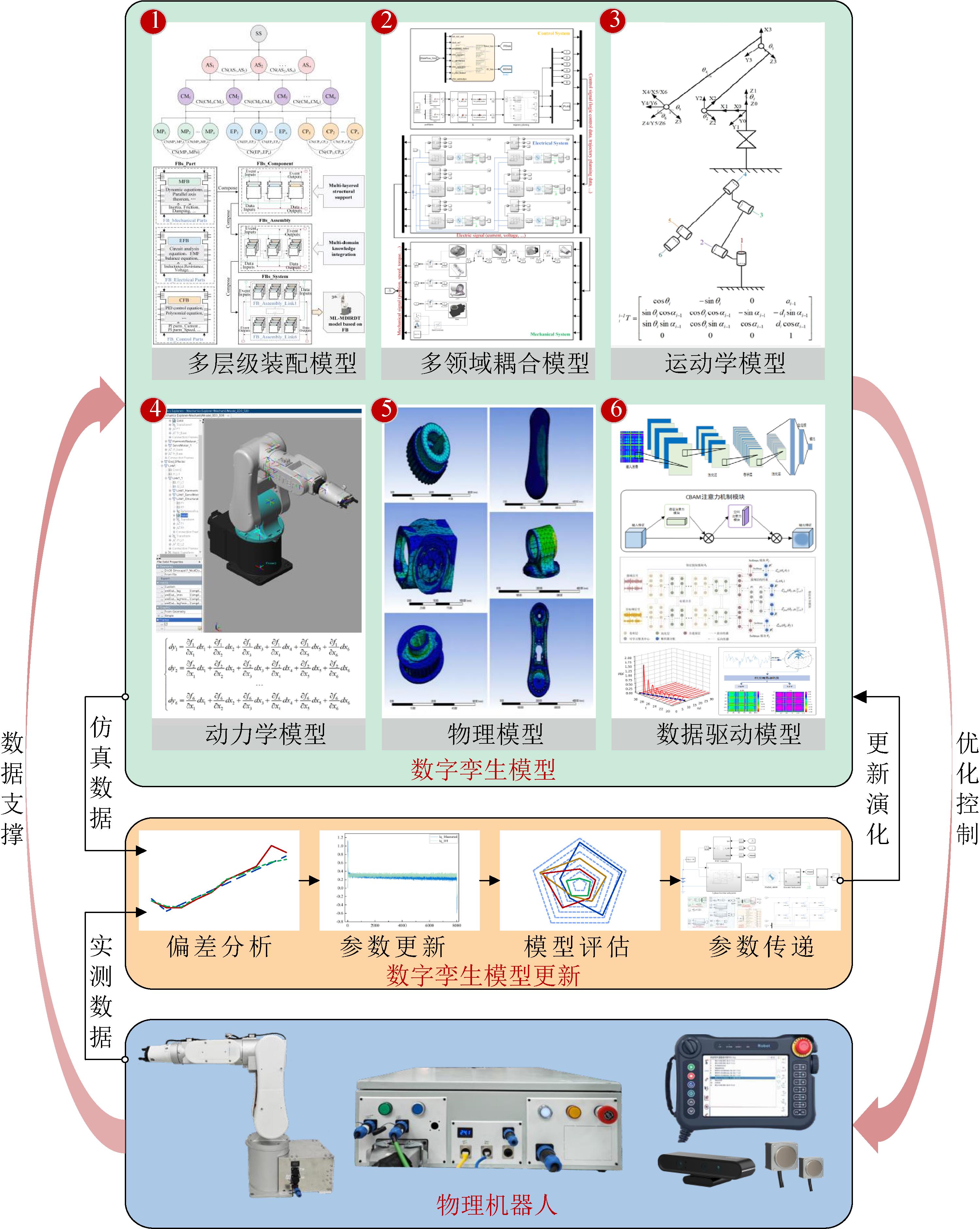
Table 1
Comparison of different models
| 模型类型 | 功能 | 构建方法 | 具体应用 |
|---|---|---|---|
| 多层级装配模型 | 以机器人的本体构成分析为基础,用于指导其他模型(如三维几何模型、多领域耦合模型等)的装配 | 结构树、知识图谱等 | 装配方案生成、可视化展示、虚拟调试等 |
| 多领域耦合模型 | 能够实现工业机器人“机-电-控”多领域耦合的高保真仿真和分析,从而支撑DTIR相关服务功能的开发 | 多软件协同建模方法、基于高层体系结构的建模方法、基于统一建模语言的建模方法等 | 高保真仿真及分析、优化设计、预测性维护等 |
| 运动学模型 | 描述和分析工业机器人位置和运动的关系 | D-H参数法、几何分析法、旋量方法等 | 位置控制、运动仿真、人机协作等 |
| 动力学模型 | 描述和分析工业机器人运动和力(力矩)的关系 | 牛顿-欧拉法、拉格朗日法等 | 前馈控制、碰撞检测、力控作业等 |
| 物理模型 | 基于物理建模的方法对工业机器人整机及核心零部件进行受力分析、疲劳分析、多物理场耦合分析等 | 解析建模方法、数值建模方法等 | 优化设计、预测性维护等 |
| 数据驱动模型 | 基于数据分析的方法对工业机器人采集的数据进行建模以反映其行为和性能等特性 | 统计模型、机器学习、深度学习等 | 优化设计、预测性维护等 |
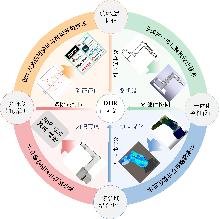
Fig. 8
Forward design technologies of DTIR
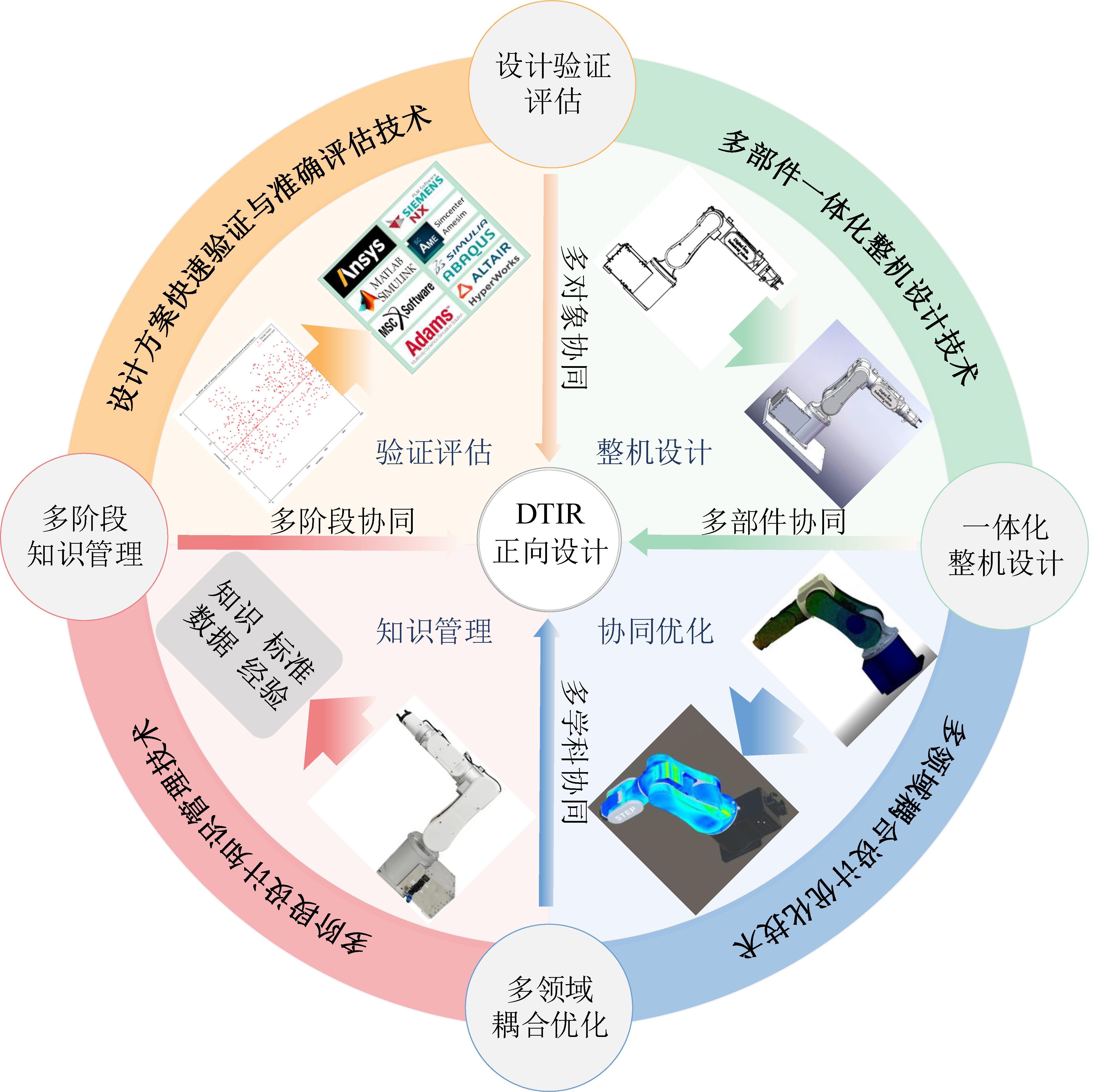
Fig. 9
Key technologies in manufacturing phase of DTIR

Fig. 10
Key technologies in operation and maintenance phase of DTIR
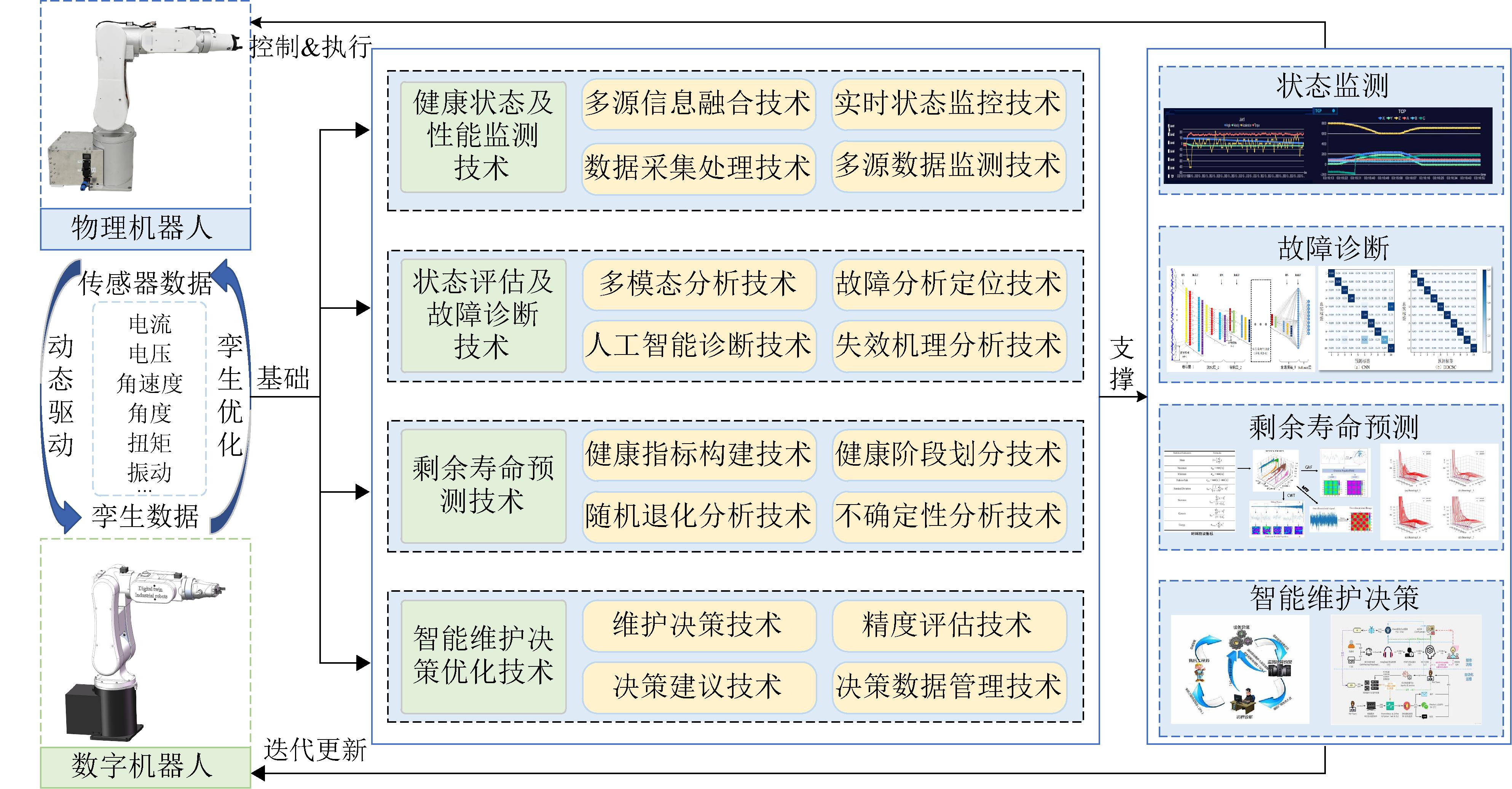
Fig. 11
Key technologies in decommissioning phase of DTIR
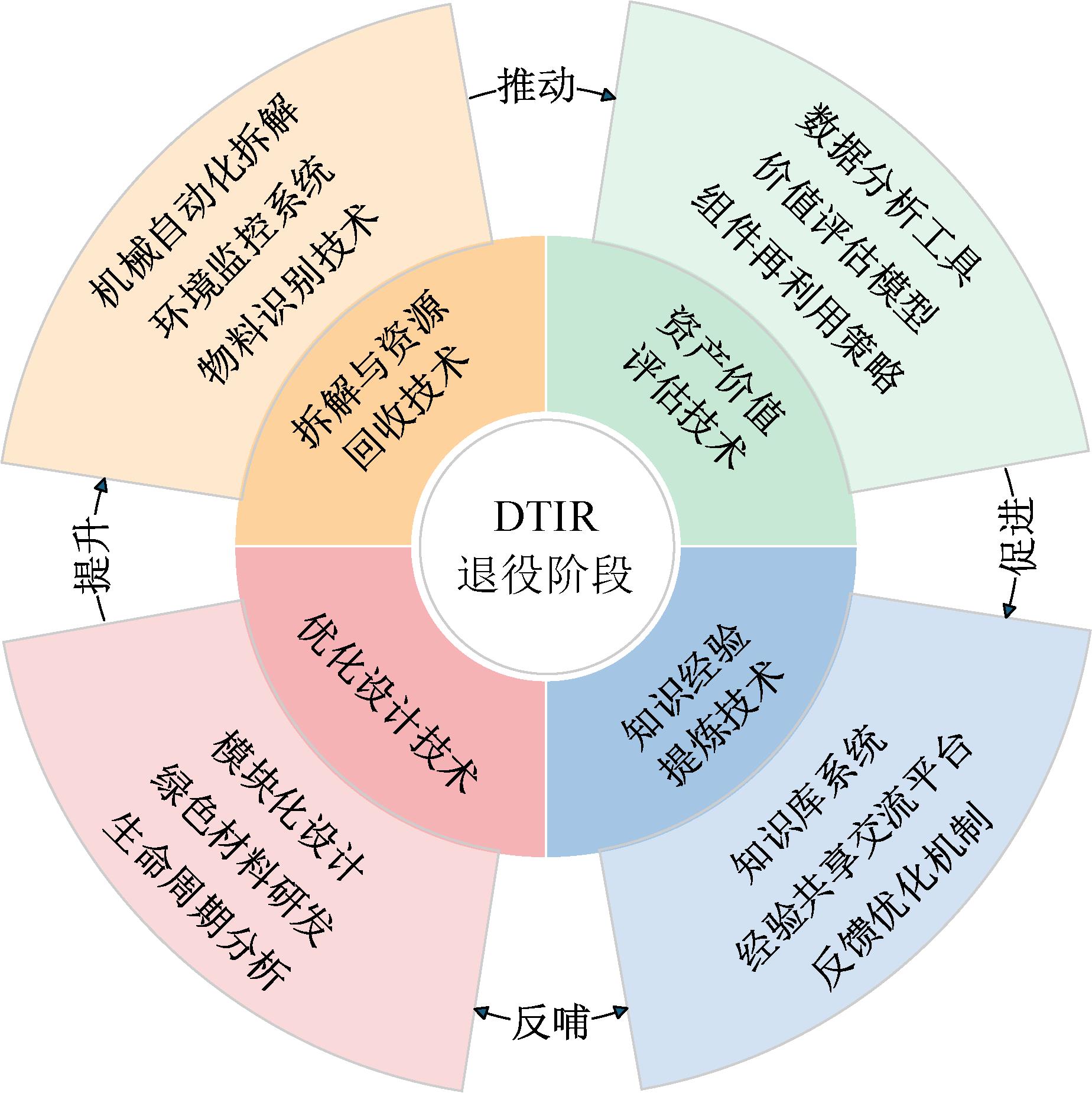

Fig. 12
Detailed design process of PIR
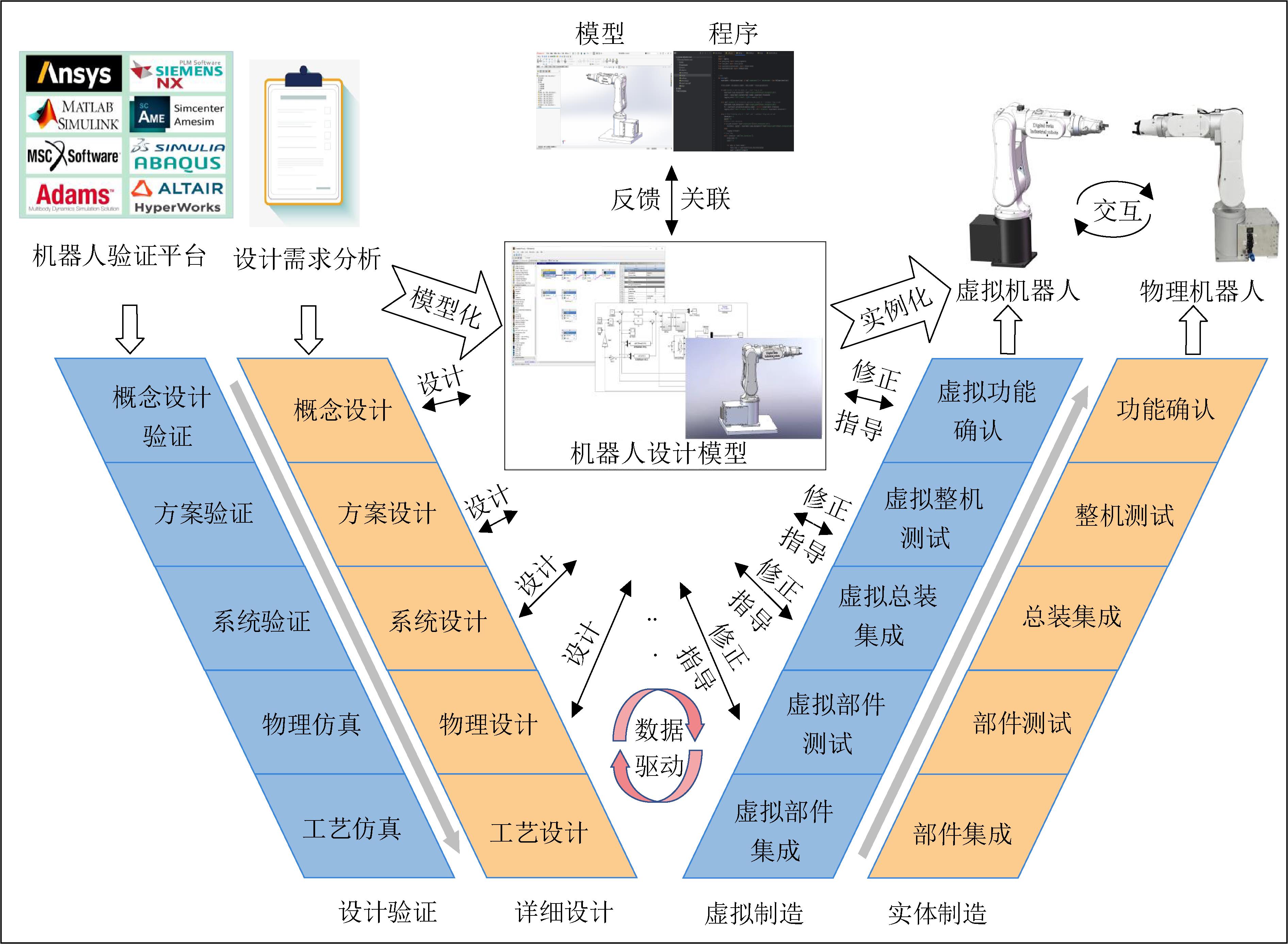
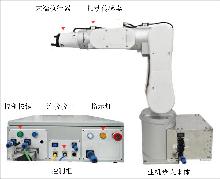
Fig. 13
Physical prototype of DTIR

Table 2
Performance parameters of the "XD1" digital twinned industrial robot
| 关节 | 电机功率/W | 伺服驱动器电流/A | 最大速度/((˚)/s) | 关节允许范围/(˚) | 传动方式 | 减速器(减速比) | 数据采集 |
|---|---|---|---|---|---|---|---|
| J1 | 400 | 6 | 330 | ±170 | 减速器 | 谐波减速器(80) | 振动、角度、速度、加速度、跟随误差、电机电流、母线电压、电机力矩、电机温度、编码器温度、整机系统电压、电流、能耗、环境温度等 |
| J2 | 400 | 6 | 330 | ±110 | 减速器 | 谐波减速器(80) | |
| J3 | 200 | 6 | 330 | +30~-220 | 减速器+同步带 | 谐波减速器(80) | |
| J4 | 400 | 3 | 260 | ±180 | 减速器+同步带 | 谐波减速器(50) | |
| J5 | 400 | 3 | 420 | ±110 | 减速器+同步带 | 谐波减速器(100) | |
| J6 | 400 | 3 | 500 | ±360 | 减速器 | 谐波减速器(100) |

Fig. 14
Implementation of multi-level multi-domain digital twin modeling and simulation
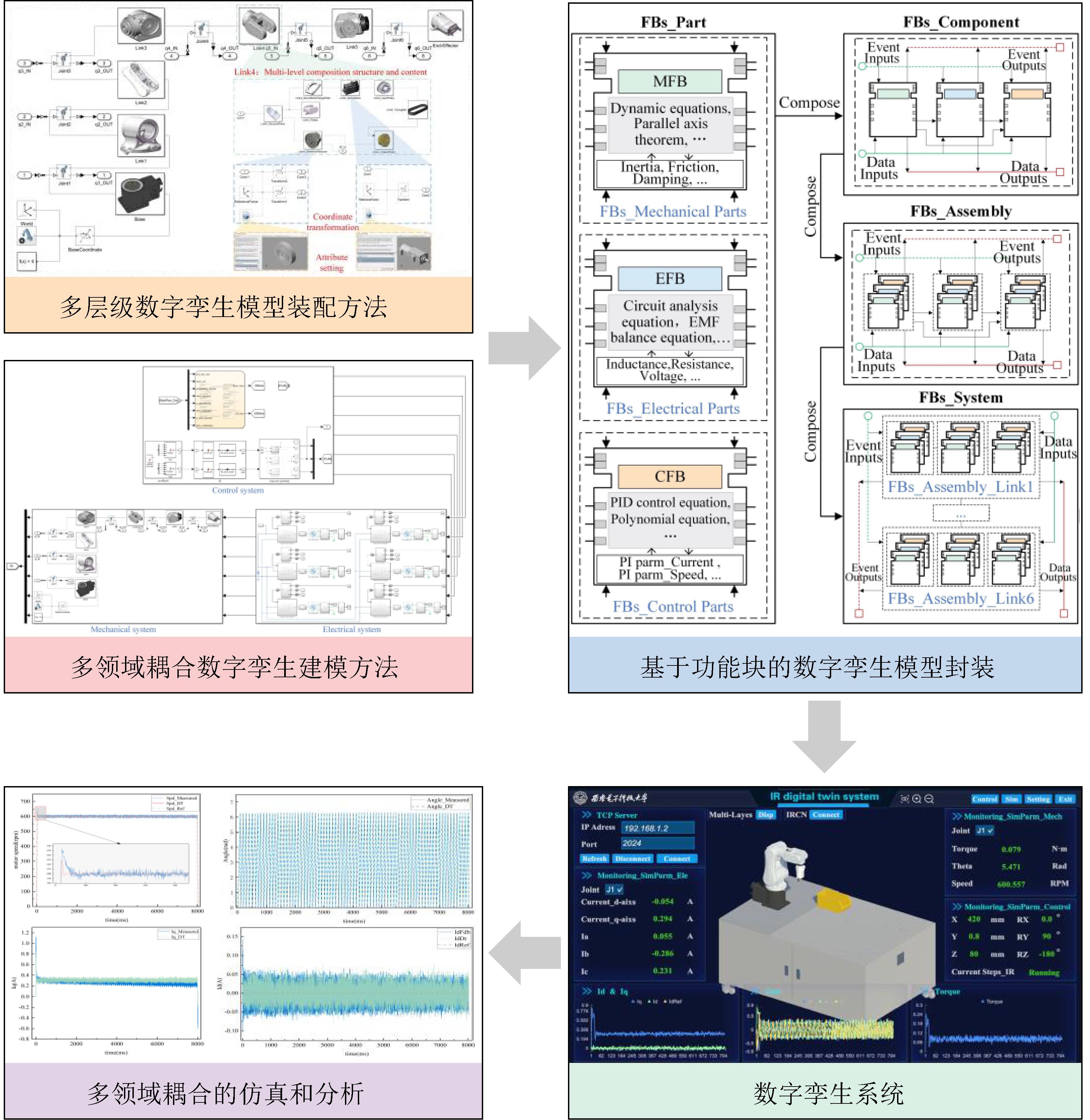

Fig. 15
Intelligent services for DTIR

| [1] | Wang Lihui. From Intelligence Science to Intelligent Manufacturing[J]. Engineering, 2019, 5(4): 615-618. |
| [2] | Xu Xun, Lu Yuqian, Vogel-Heuser Birgit, et al. Industry 4.0 and Industry 5.0-inception, Conception and Perception[J]. Journal of Manufacturing Systems, 2021, 61: 530-535. |
| [3] | Muhammad Hamza Zafar, Even Falkenberg Langås, Sanfilippo Filippo. Exploring the Synergies Between Collaborative Robotics, Digital Twins, Augmentation, and Industry 5.0 for Smart Manufacturing: A State-of-the-art Review[J]. Robotics and Computer-Integrated Manufacturing, 2024, 89: 102769. |
| [4] | Pereira J A P, Campilho R D S G, Silva F J G, et al. Robotized Cell Design for Part Assembly in the Automotive Industry[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2022, 236(16): 8807-8822. |
| [5] | Ji Wei, Wang Lihui. Industrial Robotic Machining: A Review[J]. The International Journal of Advanced Manufacturing Technology, 2019, 103(1): 1239-1255. |
| [6] | Wahrmann Daniel, Hildebrandt Arne-Christoph, Schuetz Christoph, et al. An Autonomous and Flexible Robotic Framework for Logistics Applications[J]. Journal of Intelligent & Robotic Systems, 2019, 93(3): 419-431. |
| [7] | 张霖, 陆涵. 从建模仿真看数字孪生[J]. 系统仿真学报, 2021, 33(5): 995-1007. |
| Zhang Lin, Lu Han. Discussing Digital Twin from of Modeling and Simulation[J]. Journal of System Simulation, 2021, 33(5): 995-1007. | |
| [8] | Kuts Vladimir, Sarkans Martinš, Otto Tauno, et al. Digital Twin: Concept of Hybrid Programming for Industrial Robots-use Case[C]//ASME 2019 International Mechanical Engineering Congress and Exposition. New York: ASME, 2019: V02BT02A005. |
| [9] | Garg Gaurav, Kuts Vladimir, Anbarjafari Gholamreza. Digital Twin for FANUC Robots: Industrial Robot Programming and Simulation Using Virtual Reality[J]. Sustainability, 2021, 13(18): 10336. |
| [10] | Hübel Niklas, Müller Siegfried, Eric Guiffo Kaigom. Immersive Assistance System for Intuitive Robot Programming Using Mixed-reality and Digital Twin[C]//2023 IEEE 3rd International Conference on Digital Twins and Parallel Intelligence (DTPI). Piscataway: IEEE, 2023: 1-6. |
| [11] | Matulis M, Harvey C. A Robot Arm Digital Twin Utilising Reinforcement Learning[J]. Computers & Graphics, 2021, 95: 106-114. |
| [12] | Liu Yongkui, Xu He, Liu Ding, et al. A Digital Twin-based Sim-to-real Transfer for Deep Reinforcement Learning-enabled Industrial Robot Grasping[J]. Robotics and Computer-Integrated Manufacturing, 2022, 78: 102365. |
| [13] | Zhu Zhaoju, Lin Zhimao, Huang Jianwei, et al. A Digital Twin-based Machining Motion Simulation and Visualization Monitoring System for Milling Robot[J]. The International Journal of Advanced Manufacturing Technology, 2023, 127(9): 4387-4399. |
| [14] | Ayankoso S, Kaigom Eric, Louadah H, et al. A Hybrid Digital Twin Scheme for the Condition Monitoring of Industrial Collaborative Robots[J]. Procedia Computer Science, 2024, 232: 1099-1108. |
| [15] | Zong Xueyan, Luan Yan, Wang Hongliang, et al. A Multi-robot Monitoring System Based on Digital Twin[J]. Procedia Computer Science, 2021, 183: 94-99. |
| [16] | Aivaliotis P, Georgoulias K, Arkouli Z, et al. Methodology for Enabling Digital Twin Using Advanced Physics-based Modelling in Predictive Maintenance[J]. Procedia CIRP, 2019, 81: 417-422. |
| [17] | Aivaliotis P, Georgoulias K, Chryssolouris G. The Use of Digital Twin for Predictive Maintenance in Manufacturing[J]. International Journal of Computer Integrated Manufacturing, 2019, 32(11): 1067-1080. |
| [18] | Gartner, Inc. Gartners Top 10 Technology Trends 2017[EB/OL]. (2016-10-18) [2025-01-10]. |
| 2017. | |
| [19] | Singh Maulshree, Fuenmayor Evert, Hinchy Eoin P, et al. Digital Twin: Origin to Future[J]. Applied System Innovation, 2021, 4(2): 36. |
| [20] | Grieves M. Digital Twin: Manufacturing Excellence Through Virtual Factory Replication[J]. White paper, 2014, 1(2014): 1-7. |
| [21] | Grieves M, Vickers J. Digital Twin: Mitigating Unpredictable, Undesirable Emergent Behavior in Complex Systems[M]//Franz-Josef Kahlen, Flumerfelt S, Anabela Alves. Transdisciplinary Perspectives on Complex Systems: New Findings and Approaches. Cham: Springer International Publishing, 2017: 85-113. |
| [22] | Glaessgen E H, Stargel D S. The Digital Twin Paradigm for Future NASA and U.S. Air Force Vehicles[C]//53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference. Reston: AIAA, 2012: AIAA 2012-1818. |
| [23] | Boschert Stefan, Rosen Roland. Digital Twin: A Second Life for Engineering Models[J]. ERCIM News, 2018(115): 8-9. |
| [24] | Tao Fei, Zhang He, Liu Ang, et al. Digital Twin in Industry: State-of-the-art[J]. IEEE Transactions on Industrial Informatics, 2019, 15(4): 2405-2415. |
| [25] | Kritzinger W, Karner M, Traar G, et al. Digital Twin in Manufacturing: A Categorical Literature Review and Classification[J]. IFAC-PapersOnLine, 2018, 51(11): 1016-1022. |
| [26] | Liu Mengnan, Fang Shuiliang, Dong Huiyue, et al. Review of Digital Twin About Concepts, Technologies, and Industrial Applications[J]. Journal of Manufacturing Systems, 2021, 58, Part B: 346-361. |
| [27] | Zhang Lin, Zhou Longfei, Horn B K P. Building a Right Digital Twin with Model Engineering[J]. Journal of Manufacturing Systems, 2021, 59: 151-164. |
| [28] | Zhang Meng, Tao Fei, Huang Biqing, et al. Digital Twin Data: Methods and Key Technologies[J]. Digital Twin. 2022, 1: 2. |
| [29] | Tao Fei, Xiao Bin, Qi Qinglin, et al. Digital Twin Modeling[J]. Journal of Manufacturing Systems, 2022, 64: 372-389. |
| [30] | Li Chengxi, Zheng Pai, Li Shufei, et al. AR-assisted Digital Twin-enabled Robot Collaborative Manufacturing System with Human-in-the-loop[J]. Robotics and Computer-Integrated Manufacturing, 2022, 76: 102321. |
| [31] | 郭海祥, 朱玲, 姜健男. 基于Unity3D的数字孪生机械臂抓取系统研究[J]. 齐齐哈尔大学学报(自然科学版), 2024, 40(2): 33-39. |
| Guo Haixiang, Zhu Ling, Jiang Jiannan. Research on the Digital Twin Manipulator Grab System Based on Unity3D[J]. Journal of Qiqihar University(Natural Science Edition), 2024, 40(2): 33-39. | |
| [32] | 李家鹏, 王剑, 李学伟, 等. 工业机器人装箱与码垛工作站数字孪生系统设计与优化[J]. 现代制造工程, 2023(10): 44-49. |
| Li Jiapeng, Wang Jian, Li Xuewei, et al. Design and Optimization of Digital Twin Systems for Packing and Palletizing of Industrial Robot Workstation[J]. Modern Manufacturing Engineering, 2023(10): 44-49. | |
| [33] | 张香玲, 祁宇明, 邓三鹏, 等. 工业机器人多功能系统关键技术及数字孪生平台应用[J]. 装备制造技术, 2024(6): 11-15. |
| [34] | Hu Jinfei, Li Chen, Chen Zheng, et al. Precision Motion Control of a 6-DoFs Industrial Robot with Accurate Payload Estimation[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(4): 1821-1829. |
| [35] | Pettersson Marcus, Ölvander Johan. Drive Train Optimization for Industrial Robots[J]. IEEE Transactions on Robotics, 2009, 25(6): 1419-1424. |
| [36] | Wang Zuoxue, Jiang Pei, Li Xiaobin, et al. Industrial Robots Energy Consumption Modeling, Identification and Optimization Through Time-scaling[J]. IEEE Transactions on Robotics, 2025, 41: 1456-1475. |
| [37] | 张霖, 陈真, 古鹏飞, 等. X语言、方法及工具-支持MBSE的新一代一体化建模仿真技术体系[J]. 系统仿真技术, 2024, 20(1): 1-14. |
| Zhang Lin, Chen Zhen, Gu Pengfei, et al. X Language, Methodology and Tools: New-generation Integrated Modeling and Simulation Technology Supporting MBSE[J]. System Simulation Technology, 2024, 20(1): 1-14. | |
| [38] | 梁超, 唐敬, 王吉, 等. 工业机器人健康管理数字孪生模型研究及应用[J]. 电子产品可靠性与环境试验, 2022, 40(S2): 5-10. |
| Liang Chao, Tang Jing, Wang Ji, et al. Research and Application of Digital Twin Model of Industrial Robot Health Management[J]. Electronic Product Reliability and Environmental Testing, 2022, 40(S2): 5-10. | |
| [39] | 陆涵, 张霖, 王昆玉, 等. 装备数字孪生可信评估框架研究[J]. 系统仿真学报, 2023, 35(7): 1455-1471. |
| Lu Han, Zhang Lin, Wang Kunyu, et al. A Framework on Equipment Digital Twin Credibility Assessment[J]. Journal of System Simulation, 2023, 35(7): 1455-1471. | |
| [40] | Aivaliotis Panagiotis, Arkouli Zoi, Georgoulias Konstantinos, et al. Methodology for Enabling Dynamic Digital Twins and Virtual Model Evolution in Industrial Robotics-a Predictive Maintenance Application[J]. International Journal of Computer Integrated Manufacturing, 2023, 36(7): 947-965. |
| [41] | 段现银, 秦志强, 唐小卫, 等. 基于深度强化学习的工业机器人数字孪生模型更新方法[J]. 航空制造技术, 2024, 67(11): 48-55. |
| Duan Xianyin, Qin Zhiqiang, Tang Xiaowei, et al. Update Method of Digital Twin Model of Industrial Robot Based on Deep Reinforcement Learning[J]. Aeronautical Manufacturing Technology, 2024, 67(11): 48-55. | |
| [42] | 马创业, 田威, 胡俊山, 等. 铣削工业机器人数字孪生驱动模型的构建与验证[J]. 机械制造与自动化, 2023, 52(4): 160-163. |
| Ma Chuangye, Tian Wei, Hu Junshan, et al. Construction and Validation of Digital Twin Drive Model for Milling Industrial Robots[J]. Machine Building & Automation, 2023, 52(4): 160-163. | |
| [43] | 徐健, 赵一剑, 刘高峰, 等. 基于数字孪生的工业机器人建模及监测方法[J]. 西安工程大学学报, 2024, 38(2): 124-133. |
| Xu Jian, Zhao Yijian, Liu Gaofeng, et al. Modeling and Monitoring Methods for Industrial Robots Based on Digital Twin[J]. Journal of Xi'an Polytechnic University, 2024, 38(2): 124-133. | |
| [44] | Zhang Xi, Wu Bo, Zhang Xin, et al. An Effective MBSE Approach for Constructing Industrial Robot Digital Twin System[J]. Robotics and Computer-Integrated Manufacturing, 2023, 80: 102455. |
| [45] | Park Su-Young, Lee Cheonghwa, Kim Hyungjung, et al. Enhancement of Control Performance for Degraded Robot Manipulators Using Digital Twin and Proximal Policy Optimization[J]. IEEE Access, 2024, 12: 19569-19583. |
| [46] | Jiang Zhiqian, Liu Wei, Wu Jinhui, et al. Neural Network-based Compensation of End Position and Attitude Error in Digital Twin Model of Industrial Robots[C]//2024 IEEE International Conference on Mechatronics and Automation (ICMA). Piscataway: IEEE, 2024: 1206-1212. |
| [47] | Hou Maxiao, Cao Hongrui, Shi Jianghai, et al. An Industry-oriented Digital Twin Model for Predicting Posture-dependent FRFs of Industrial Robots[J]. Mechanical Systems and Signal Processing, 2024, 212: 111251. |
| [48] | Heredia Juan, Zielinski Krzysztof, Schlette Christian, et al. Empowering Cobots with Energy Models: Real Augmented Digital Twin Cobot with Accurate Energy Consumption Model[C]//2023 32nd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN). Piscataway: IEEE, 2023: 1353-1359. |
| [49] | Ren Lei, Dong Jiabao, Huang Di, et al. Digital Twin Robotic System with Continuous Learning for Grasp Detection in Variable Scenes[J]. IEEE Transactions on Industrial Electronics, 2024, 71(7): 7650-7660. |
| [50] | Imran Abid, Kim Sanghwa, Woo Jaehong, et al. Modeling, Analysis, and Optimization of Robotic Light Machining Tasks for Empowering Digital Twin: Generalized Impulse Model Approach[J]. IEEE Access, 2022, 10: 105133-105148. |
| [51] | Åblad Edvin, Spensieri Domenico, Bohlin Robert, et al. Continuous Collision Detection of Pairs of Robot Motions Under Velocity Uncertainty[J]. IEEE Transactions on Robotics, 2021, 37(5): 1780-1791. |
| [52] | Li Xin, He Bin, Wang Zhipeng, et al. Digital Twin-driven Task Replanning Method for Robot-environment Physical Interaction[C]//2022 12th International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER). Piscataway: IEEE, 2022: 407-412. |
| [53] | Li Xin, He Bin, Wang Zhipeng, et al. A Digital Twin System for Task-replanning and Human-robot Control of Robot Manipulation[J]. Advanced Engineering Informatics, 2024, 62, Part A: 102570. |
| [54] | Wang Xuewu, Hua Yi, Gao Jin, et al. Digital Twin Implementation of Autonomous Planning Arc Welding Robot System[J]. Complex System Modeling and Simulation, 2023, 3(3): 236-251. |
| [55] | Tang Yongpeng, Wang Yaonan, Tan Haoran, et al. A Digital Twin-based Intelligent Robotic Measurement System for Freeform Surface Parts[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 1-13. |
| [56] | Jian Lü, Mao Shaoxiong, Qiang Ligang, et al. Tokamak O&M Robot Dynamic Control by Using Optimized FABRIK and Spatial Partition Strategies in Digital Twin System[J]. IEEE Transactions on Industrial Informatics, 2025, 21(2): 1595-1604. |
| [57] | Zhou Zhengxue, Yang Xingyu, Wang Hao, et al. Digital Twin with Integrated Robot-human/Environment Interaction Dynamics for an Industrial Mobile Manipulator[C]//2022 International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2022: 5041-5047. |
| [58] | 缪天越, 王璐, 何家孝, 等. 融合强化学习的工业机器人数字孪生仿真方法研究[J]. 系统仿真学报, 2024, 36(12): 2971-2983. |
| Miao Tianyue, Wang Lu, He Jiaxiao, et al. Research on Digital Twin Simulation Method of Industrial Robot Integrated with Reinforcement Learning[J]. Journal of System Simulation, 2024, 36(12): 2971-2983. | |
| [59] | Lee Hyunsoo, Kim S D, Amin M A U A. Control Framework for Collaborative Robot Using Imitation Learning-based Teleoperation from Human Digital Twin to Robot Digital Twin[J]. Mechatronics, 2022, 85: 102833. |
| [60] | Bondarenko Yevhen, Simone Luca Pizzagalli, Kuts Vladimir, et al. Digital Twin Based Learning from Demonstration System for Industrial Robots[C]//ASME 2023 International Mechanical Engineering Congress and Exposition. New York: ASME, 2023: V003T03A081. |
| [61] | Burghardt Andrzej, Szybicki Dariusz, Gierlak Piotr, et al. Programming of Industrial Robots Using Virtual Reality and Digital Twins[J]. Applied Sciences, 2020, 10(2): 486. |
| [62] | Lars Carøe Sørensen, Mathiesen Simon, Waspe Ralf, et al. Towards Digital Twins for Industrial Assembly - Improving Robot Solutions by Intuitive User Guidance and Robot Programming[C]//2020 25th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA). Piscataway: IEEE, 2020: 1480-1484. |
| [63] | Audonnet F P, Grizou J, Hamilton A, et al. TELESIM: A Modular and Plug-and-play Framework for Robotic Arm Teleoperation using a Digital Twin[C]//2024 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2024: 17770-17777. |
| [64] | 刘亚军, 訾斌, 王正雨, 等. 智能喷涂机器人关键技术研究现状及进展[J]. 机械工程学报, 2022, 58(7): 53-74. |
| Liu Yajun, Zi Bin, Wang Zhengyu, et al. Research Progress and Trend of Key Technology of Intelligent Spraying Robot[J]. Journal of Mechanical Engineering, 2022, 58(7): 53-74. | |
| [65] | 訾斌, 潘敬锋, 李元, 等. 智能喷涂机器人编程方法与遥操作技术研究综述[J]. 控制与决策, 2025, 40(4): 1057-1078. |
| Zi Bin, Pan Jingfeng, Li Yuan, et al. Programming Methods and Teleoperation Technology for Intelligent Spray-painting Robot: A Review[J]. Control and Decision, 2025, 40(4): 1057-1078. | |
| [66] | 刘鑫, 李公法, 向峰, 等. 基于公理设计的人机协作数字孪生建模技术[J]. 计算机集成制造系统, 2023, 29(11): 3547-3559. |
| Liu Xin, Li Gongfa, Xiang Feng, et al. Human-robot Collaboration Digital Twin Modeling Technology Based on Axiom Design[J]. Computer Integrated Manufacturing Systems, 2023, 29(11): 3547-3559. | |
| [67] | 鲍劲松, 张荣, 李婕, 等. 面向人-机-环境共融的数字孪生协同技术[J]. 机械工程学报, 2022, 58(18): 103-115. |
| Bao Jinsong, Zhang Rong, Li Jie, et al. Digital-twin Collaborative Technology for Human-robot-Environment Integration[J]. Journal of Mechanical Engineering, 2022, 58(18): 103-115. | |
| [68] | 李浩, 刘根, 文笑雨, 等. 面向人机交互的数字孪生系统工业安全控制体系与关键技术[J]. 计算机集成制造系统, 2021, 27(2): 374-389. |
| Li Hao, Liu Gen, Wen Xiaoyu, et al. Industrial Safety Control System and Key Technologies of Digital Twin System Oriented to Human-machine Interaction[J]. Computer Integrated Manufacturing Systems, 2021, 27(2): 374-389. | |
| [69] | 杨赓, 周慧颖, 王柏村. 数字孪生驱动的智能人机协作:理论、技术与应用[J]. 机械工程学报, 2022, 58(18): 279-291. |
| Yang Geng, Zhou Huiying, Wang Baicun. Digital Twin-driven Smart Human-machine Collaboration: Theory, Enabling Technologies and Applications[J]. Journal of Mechanical Engineering, 2022, 58(18): 279-291. | |
| [70] | Zhong Dong, Xia Zhelei, Zhu Yian, et al. Overview of Predictive Maintenance Based on Digital Twin Technology[J]. Heliyon, 2023, 9(4): e14534. |
| [71] | Chen Chong, Fu Huibin, Zheng Yu, et al. The Advance of Digital Twin for Predictive Maintenance: The Role and Function of Machine Learning[J]. Journal of Manufacturing Systems, 2023, 71: 581-594. |
| [72] | Errandonea Itxaro, Beltrán Sergio, Arrizabalaga Saioa. Digital Twin for Maintenance: A Literature Review[J]. Computers in Industry, 2020, 123: 103316. |
| [73] | Liu Xuan, Gan He, Luo Ying, et al. Digital-twin-based Real-time Optimization for a Fractional Order Controller for Industrial Robots[J]. Fractal and Fractional, 2023, 7(2): 167. |
| [74] | Hu Bingtao, Cheng Dinghao, Fu Yun, et al. An Equipment-level Digital Twin Method for Industrial Robots for Machining[J]. International Journal of Production Research, 2024: 1-19. |
| [75] | Wang Shijie, Tao Jianfeng, Jiang Qincheng, et al. A Digital Twin Framework for Anomaly Detection in Industrial Robot System Based on Multiple Physics-informed Hybrid Convolutional Autoencoder[J]. Journal of Manufacturing Systems, 2024, 77: 798-809. |
| [76] | Nguyen Nguyen, Chu Anh My, Le C H, et al. Motion and Condition Monitoring of an Industrial Robot Based on Digital Twins[C]//Proceedings of the 3rd Annual International Conference on Material, Machines and Methods for Sustainable Development (MMMS2022). Cham: Springer Nature Switzerland, 2024: 445-456. |
| [77] | Carratù Marco, Gallo Vincenzo, Salvatore Dello Iacono, et al. A Novel Methodology for Unsupervised Anomaly Detection in Industrial Electrical Systems[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 1-12. |
| [78] | Thoppil Nikhil M, Vasu V, Rao C S P. Health Indicator Construction and Remaining Useful Life Estimation for Mechanical Systems Using Vibration Signal Prognostics[J]. International Journal of System Assurance Engineering and Management, 2021, 12(5): 1001-1010. |
| [79] | Yang Bin, Guo Kai, Zhou Qian, et al. Early Chatter Detection in Robotic Milling Under Variable Robot Postures and Cutting Parameters[J]. Mechanical Systems and Signal Processing, 2023, 186: 109860. |
| [80] | Wu Bin, Shi Hui, Zeng Jianchao, et al. Remaining Useful Life Prediction for Complex Systems with Multiple Indicators of Stochastic Correlation Considering Random Shocks[J]. Mechanical Systems and Signal Processing, 2023, 204: 110767. |
| [81] | Li Xilin, Teng Wei, Peng Dikang, et al. Feature Fusion Model Based Health Indicator Construction and Self-constraint State-space Estimator for Remaining Useful Life Prediction of Bearings in Wind Turbines[J]. Reliability Engineering & System Safety, 2023, 233: 109124. |
| [82] | Jiang Guoqian, Wang Jing, Wang Lijin, et al. An Interpretable Convolutional Neural Network with Multi-wavelet Kernel Fusion for Intelligent Fault Diagnosis[J]. Journal of Manufacturing Systems, 2023, 70: 18-30. |
| [83] | Zhang Yadong, Zhang Chao, Wang Shaoping, et al. Health Indicators for Remaining Useful Life Prediction of Complex Systems Based on Long Short-term Memory Network and Improved Particle Filter[J]. Reliability Engineering & System Safety, 2024, 241: 109666. |
| [84] | Meng Jiadong, Yan Changfeng, Chen Guangyi, et al. Health Indicator of Bearing Constructed by rms-CUMSUM and GRRMD-CUMSUM with Multifeatures of Envelope Spectrum[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-16. |
| [85] | Pazho A D, Noghre G A, Purkayastha A A, et al. A Survey of Graph-based Deep Learning for Anomaly Detection in Distributed Systems[J]. IEEE Transactions on Knowledge and Data Engineering, 2024, 36(1): 1-20. |
| [86] | Mestav K R, Wang Xinyi, Tong Lang. A Deep Learning Approach to Anomaly Sequence Detection for High-resolution Monitoring of Power Systems[J]. IEEE Transactions on Power Systems, 2023, 38(1): 4-13. |
| [87] | Ma Xin, Qi Qinglin, Cheng Jiangfeng, et al. A Consistency Method for Digital Twin Model of Human-robot Collaboration[J]. Journal of Manufacturing Systems, 2022, 65: 550-563. |
| [88] | Song Zelong, Shi Huaitao, Bai Xiaotian, et al. Digital Twin-assisted Fault Diagnosis System for Robot Joints with Insufficient Data[J]. Journal of Field Robotics, 2023, 40(2): 258-271. |
| [89] | Bhatti Ghanishtha, Raja Singh R. Intelligent Fault Diagnosis Mechanism for Industrial Robot Actuators using Digital Twin Technology[C]//2021 IEEE International Power and Renewable Energy Conference (IPRECON). Piscataway: IEEE, 2021: 1-6. |
| [90] | Feng Ke, Xu Yadong, Wang Yulin, et al. Digital Twin Enabled Domain Adversarial Graph Networks for Bearing Fault Diagnosis[J]. IEEE Transactions on Industrial Cyber-Physical Systems, 2023, 1: 113-122. |
| [91] | Jin Luhan, Mao Yao, Wang Xueqing, et al. Fault Diagnosis of PMSM Drives Based on Digital Twin Modeling[C]//2024 IEEE 10th International Power Electronics and Motion Control Conference (IPEMC2024-ECCE Asia). Piscataway: IEEE, 2024: 422-425. |
| [92] | Mourtzis Dimitris, Tsoubou Sofia, Angelopoulos John. Robotic Cell Reliability Optimization Based on Digital Twin and Predictive Maintenance[J]. Electronics, 2023, 12(9): 1999. |
| [93] | Zhao Wentao, Zhang Chao, Fan Bin, et al. Research on Rolling Bearing Virtual-real Fusion Life Prediction with Digital Twin[J]. Mechanical Systems and Signal Processing, 2023, 198: 110434. |
| [94] | Guo Haoyu, Wang Shaoping, Shi Jian, et al. Dynamically Updated Digital Twin for Prognostics and Health Management: Application in Permanent Magnet Synchronous Motor[J]. Chinese Journal of Aeronautics, 2024, 37(6): 244-261. |
| [95] | He Deqiang, Zhao Jiayang, Jin Zhenzhen, et al. Prediction of Bearing Remaining Useful Life Based on a Two-stage Updated Digital Twin[J]. Advanced Engineering Informatics, 2025, 65, Part A: 103123. |
| [96] | Guo Jinyan, Yang Zhaojun, Chen Chuanhai, et al. Real-time Prediction of Remaining Useful Life and Preventive Maintenance Strategy Based on Digital Twin[J]. Journal of Computing and Information Science in Engineering, 2021, 21(3): 031003. |
| [97] | Cui Lingli, Xiao Yongchang, Liu Dongdong, et al. Digital Twin-driven Graph Domain Adaptation Neural Network for Remaining Useful Life Prediction of Rolling Bearing[J]. Reliability Engineering & System Safety, 2024, 245: 109991. |
| [98] | ALTAIR. Digital Twin Design Process for Efficient: Development and Operation of a Customized Robot[EB/OL]. (2020-08-24) [2025-01-24]. |
| digital_twin_design_for_customized_robot.pdf?sfvrsn=3d6c9cff_3. | |
| [99] | FANUC. FANUC's New AI Functions Utilizing Machine Learning and Deep Learning[EB/OL]. (2018-04-16) [2025-01-24]. . |
| [100] | 邹风山. 数字孪生在工业机器人领域的应用[EB/OL]. (2024-08-16) [2025-01-25]. . |
| [101] | ABB. ABB推出PickMaster® Twin, 数字孪生技术缩短调试时间[EB/OL]. (2019-09-17) [2025-01-25]. . |
| [102] | YASKAWA. Faster from Idea to System Solution: Digital Twin Optimises BÜRkle Systems; Yaskawa Robots Can Be Easily Programmed Via the SRCI Interface[EB/OL]. (2024-11-11) [2025-01-25]. |
| burkle-systems-yaskawa-robots-can-be-easily-programmed- | |
| via-the-siemens-srci-interface_n 21293. | |
| [103] | 上海新时达电气股份有限公司. 新时达总经理武玉会再论"数字孪生"[EB/OL]. (2021-07-30) [2025-01-25]. . |
| [104] | Wang Shijie, Tao Jianfent, Jiang Qinchent, et al. A Degradation Assessment Method for Industrial Robot in Flexible Manufacturing Systems Based on Multiple Physics-informed Neural Network[J]. Mechanical Systems and Signal Processing, 2025, 233: 112793. |
| [105] | Liu Jiayi, Xu Zhenlu, Xiong Heng, et al. Digital Twin-driven Robotic Disassembly Sequence Dynamic Planning Under Uncertain Missing Condition[J]. IEEE Transactions on Industrial Informatics, 2023, 19(12): 11846-11855. |
| [1] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| [2] | Nan Yandong, Zhu Jinda, Lu Xinbin, Qin Zhiying, Qi Dandan, Ding Zhiheng. State Monitoring of Nuclear Power Connection Sleeve Quality Inspection Equipment Driven by Digital Twin [J]. Journal of System Simulation, 2026, 38(4): 1004-1017. |
| [3] | Yan Dong, Yang Hanzhe, Jiang Fangfang, Liu Chengbao, Zhang Peng. Design and Application of Collaborative Simulation System for Satellite Constellation Flight Missions [J]. Journal of System Simulation, 2026, 38(4): 1067-1079. |
| [4] | Wang Ziying, Sun Congjun, Li Guihu, Zhang Tianhao. Virtual Train Operation Platform Based on Digital Twin [J]. Journal of System Simulation, 2026, 38(3): 736-745. |
| [5] | Lu Houjun, Zhu Yifei, Rong Yanping, Zhang Wanghui. Digital Twin Modeling Method for Bulk Cargo Stacks Based on 2D LiDAR [J]. Journal of System Simulation, 2025, 37(9): 2269-2286. |
| [6] | Liu Tao, Li Hanxi, Yin Yong, Liu Jialun. Research Review of Intelligent Navigation Simulation Technology and Its Applications [J]. Journal of System Simulation, 2025, 37(7): 1684-1709. |
| [7] | Chen Qinghua, Liang Zuoyou, Guan Weijuan, Ji Jiadong, Liu Ping. Construction Method of Digital Twin System for High-low Temperature Test Chamber [J]. Journal of System Simulation, 2025, 37(6): 1400-1411. |
| [8] | Zhang Wenjia, Zhang Heming. Research on Grey-box Modeling Method of Digital Twins for Cantilever Structure [J]. Journal of System Simulation, 2025, 37(5): 1158-1168. |
| [9] | Zhang Huimai, Hu Xiaoya, Zhou Chunjie. Digital Twin Framework for the Generation and Optimization of Security Policies for TSN Industrial Control Systems [J]. Journal of System Simulation, 2025, 37(4): 861-874. |
| [10] | Jiang Lun, Wang Dajiang, Sun Wenlei, Bao Shenghui, Liu Han, Chang Saike. Research on Transformer Fault Diagnosis Method Based on Digital Twin [J]. Journal of System Simulation, 2025, 37(3): 775-790. |
| [11] | Hu Tianxiang, Ye Hui, Yang Xiaofei. Construction of a Digital Twin-based Ship Manufacturing Workshop Monitoring System [J]. Journal of System Simulation, 2025, 37(2): 517-528. |
| [12] | Zheng Jiayu, Mai Zhuxue, Chen Zheyi. Optimization of Service Caching and Computation Offloading in Digital Twin Cloud-edge Networks [J]. Journal of System Simulation, 2025, 37(11): 2741-2753. |
| [13] | Zhang Xiyang, Lin Xusheng, Zhou Rui, Hu Yi. Research on the Digital Twin Architecture and Application of CNC System [J]. Journal of System Simulation, 2025, 37(1): 183-198. |
| [14] | Wu Qinghui, BaoYaqing , Zhao Zhongxin, Huang Xu, Wei Yuchen. Research and Implementation of Digital Twin System for Mine Drainage Monitoring [J]. Journal of System Simulation, 2025, 37(1): 199-210. |
| [15] | Zhao Baiting, Shi Jianguo, Jia Xiaofen. Research on Digital Twin System of Rockshaft Hoist [J]. Journal of System Simulation, 2024, 36(9): 2054-2064. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
