

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (7): 1497-1507.doi: 10.16182/j.issn1004731x.joss.22-0272
• Papers • Previous Articles Next Articles
Jian Xu1( ), Xin Song1(), Xiuping Liu1, Bo Chen1, Huanying Yan2
), Xin Song1(), Xiuping Liu1, Bo Chen1, Huanying Yan2
Received:2022-03-28
Revised:2022-05-24
Online:2023-07-29
Published:2023-07-19
Contact:
Xin Song
E-mail:xu0910@sian.com;songxin96@126.com
CLC Number:
Jian Xu, Xin Song, Xiuping Liu, Bo Chen, Huanying Yan. Modeling and System Realization of Assembly Robot Based on Digital Twin[J]. Journal of System Simulation, 2023, 35(7): 1497-1507.
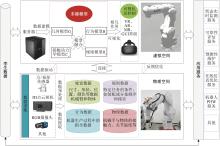
Fig. 1
Robot digital twin system framework
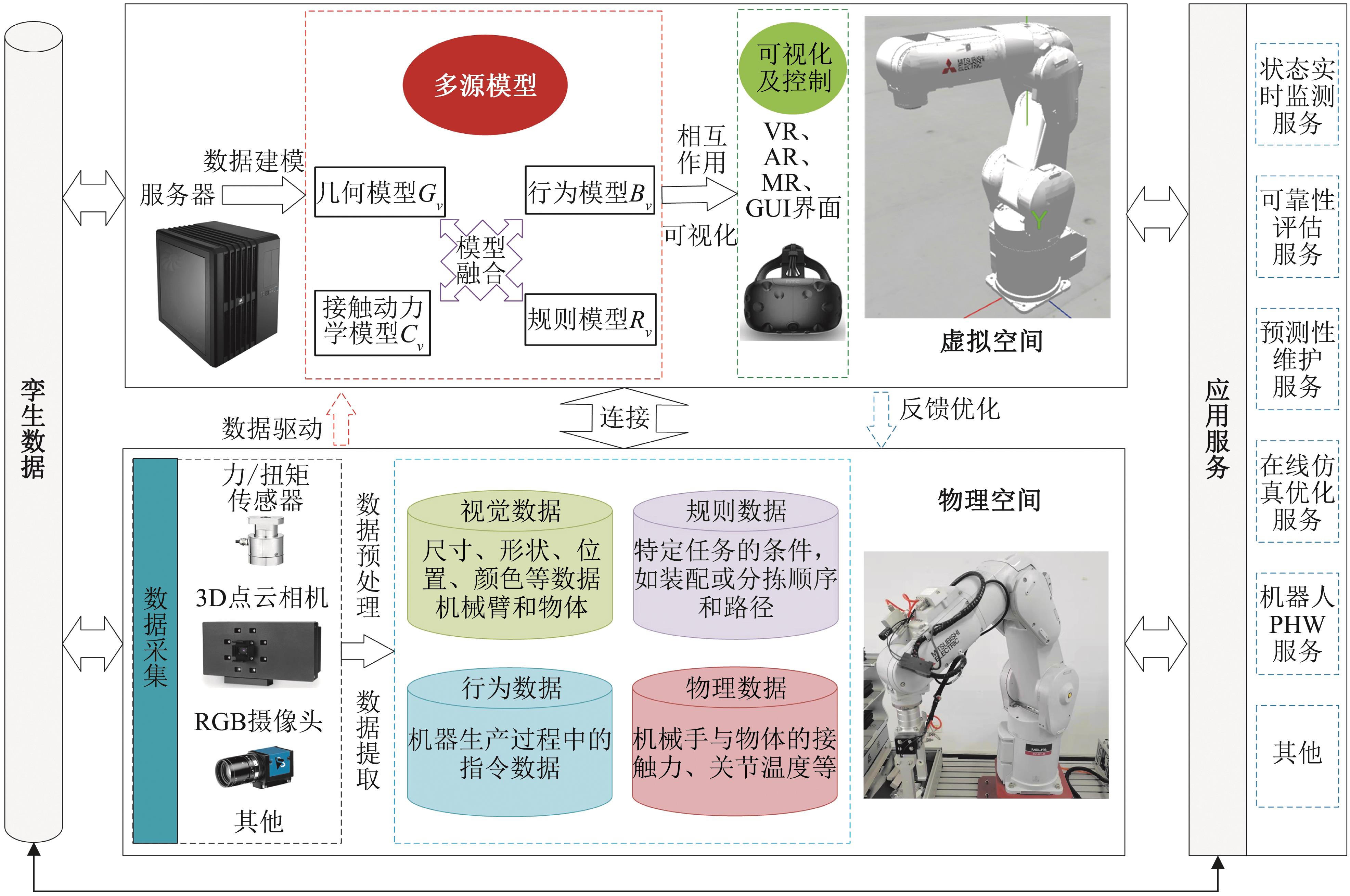

Fig. 2
URDF models and 3D models of robots
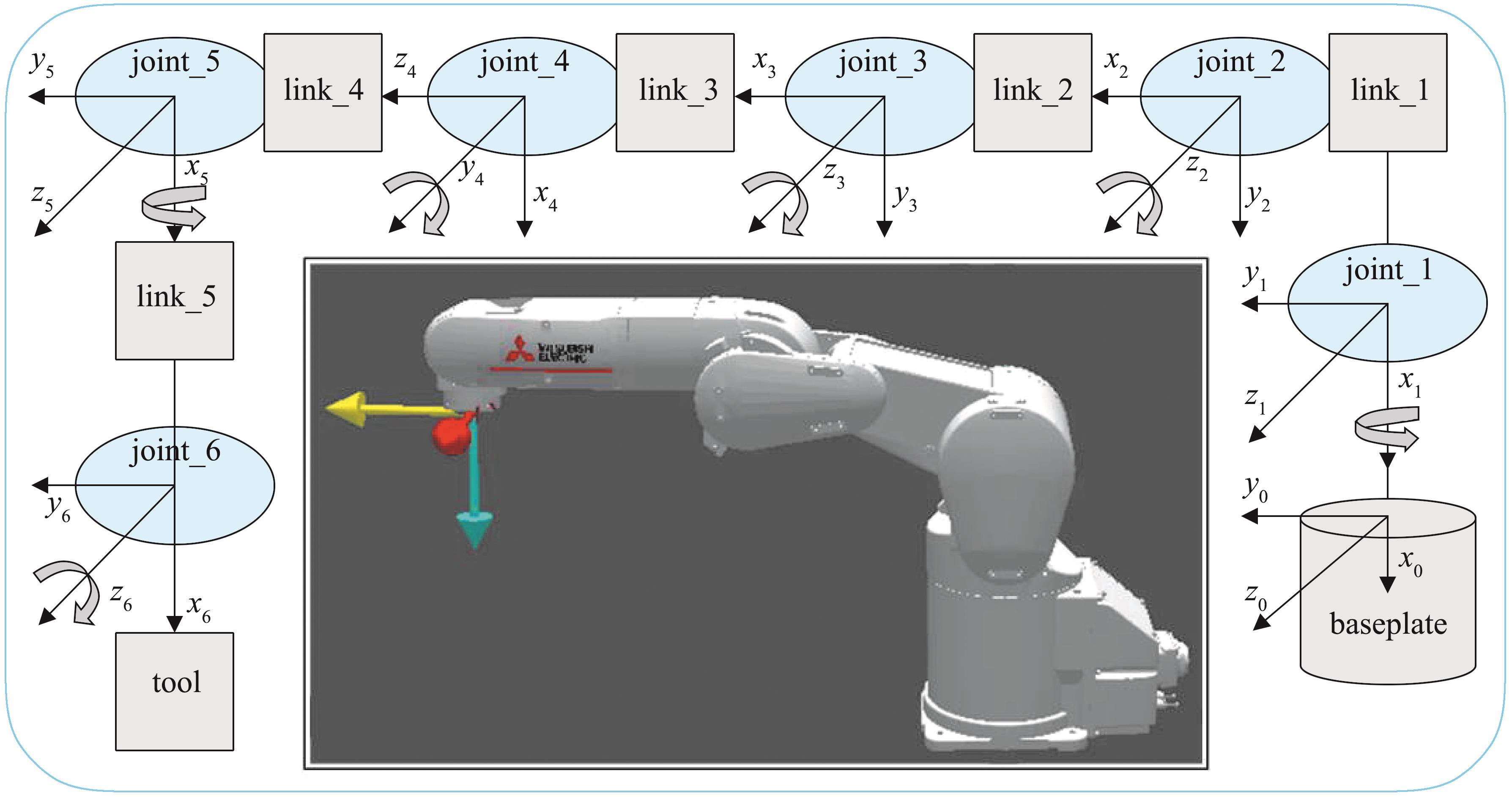
Fig. 3
Image captured by the point cloud camera
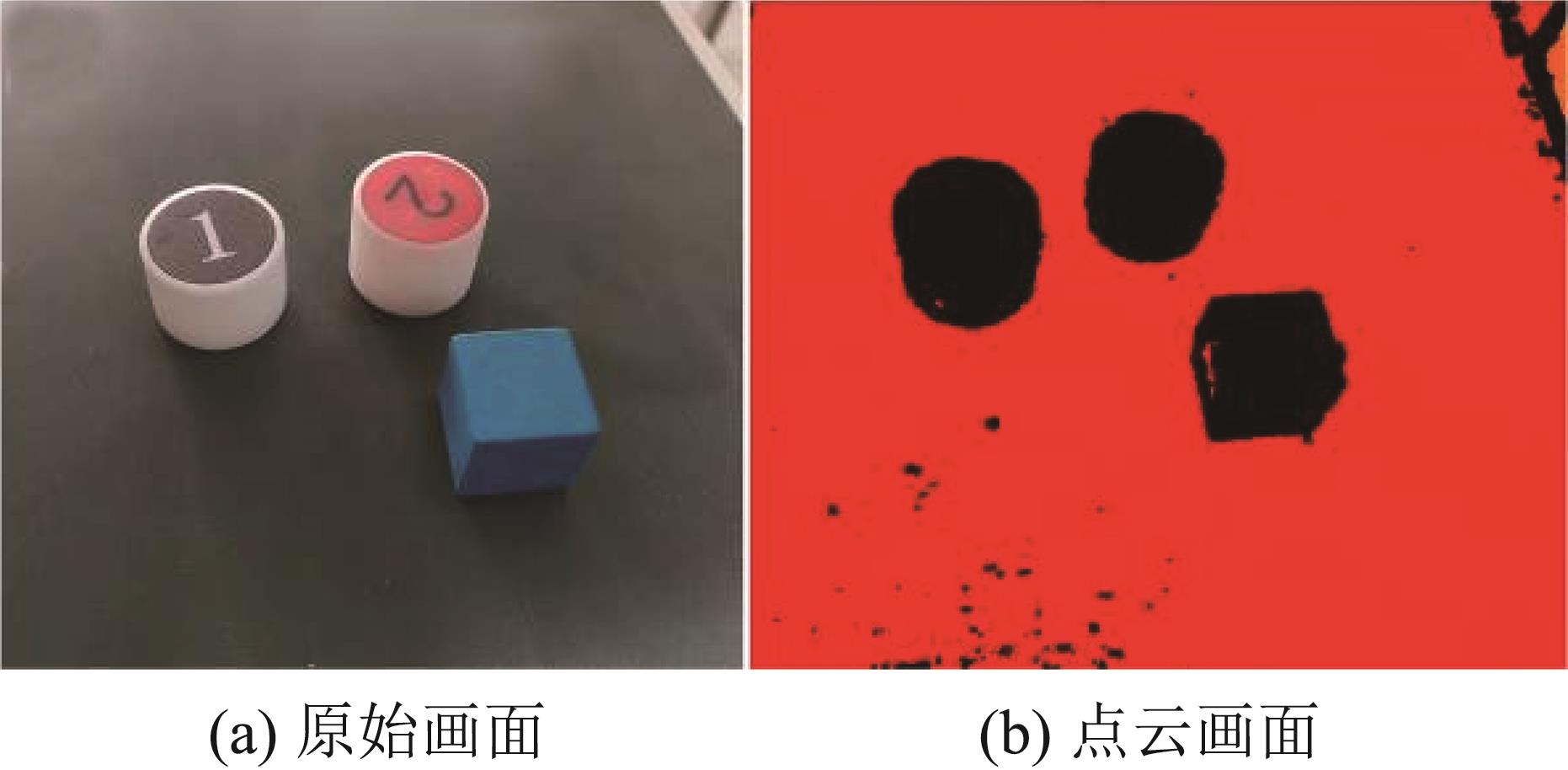

Fig. 4
3D point cloud reconstruction environment process
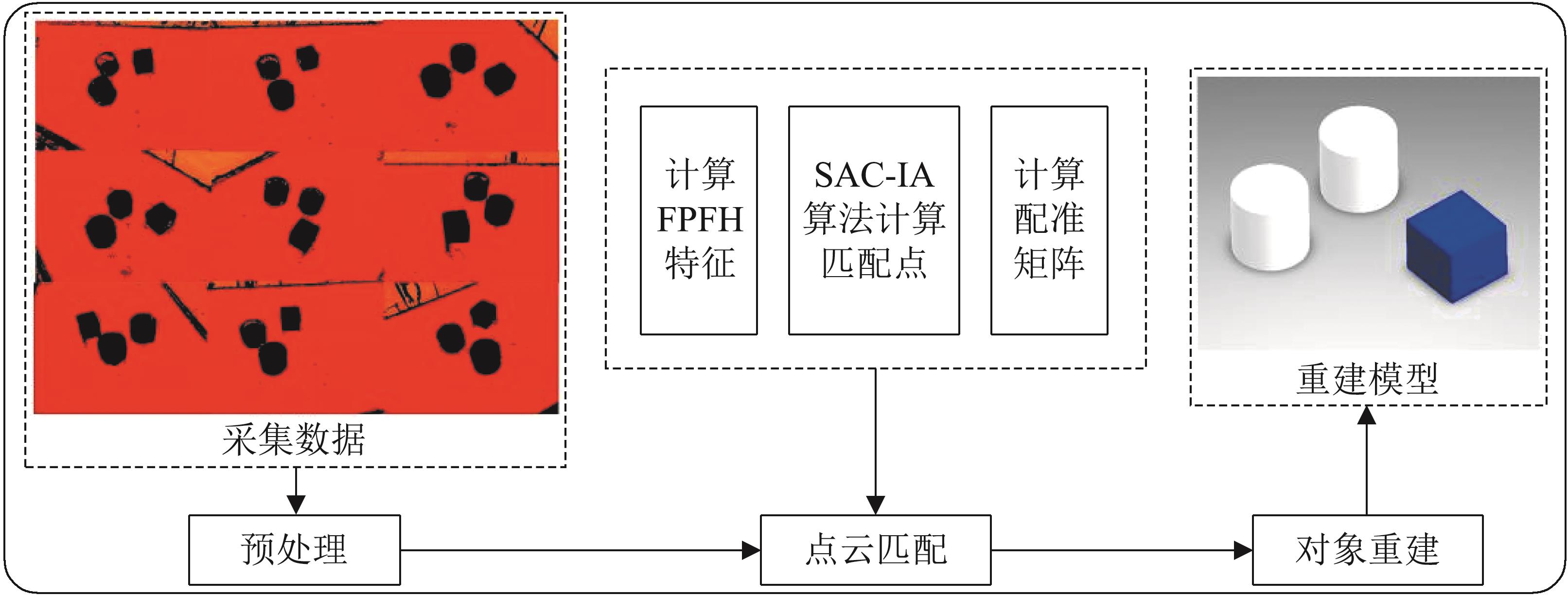
Fig. 5
Hybrid Petri Model of Robot Behavior
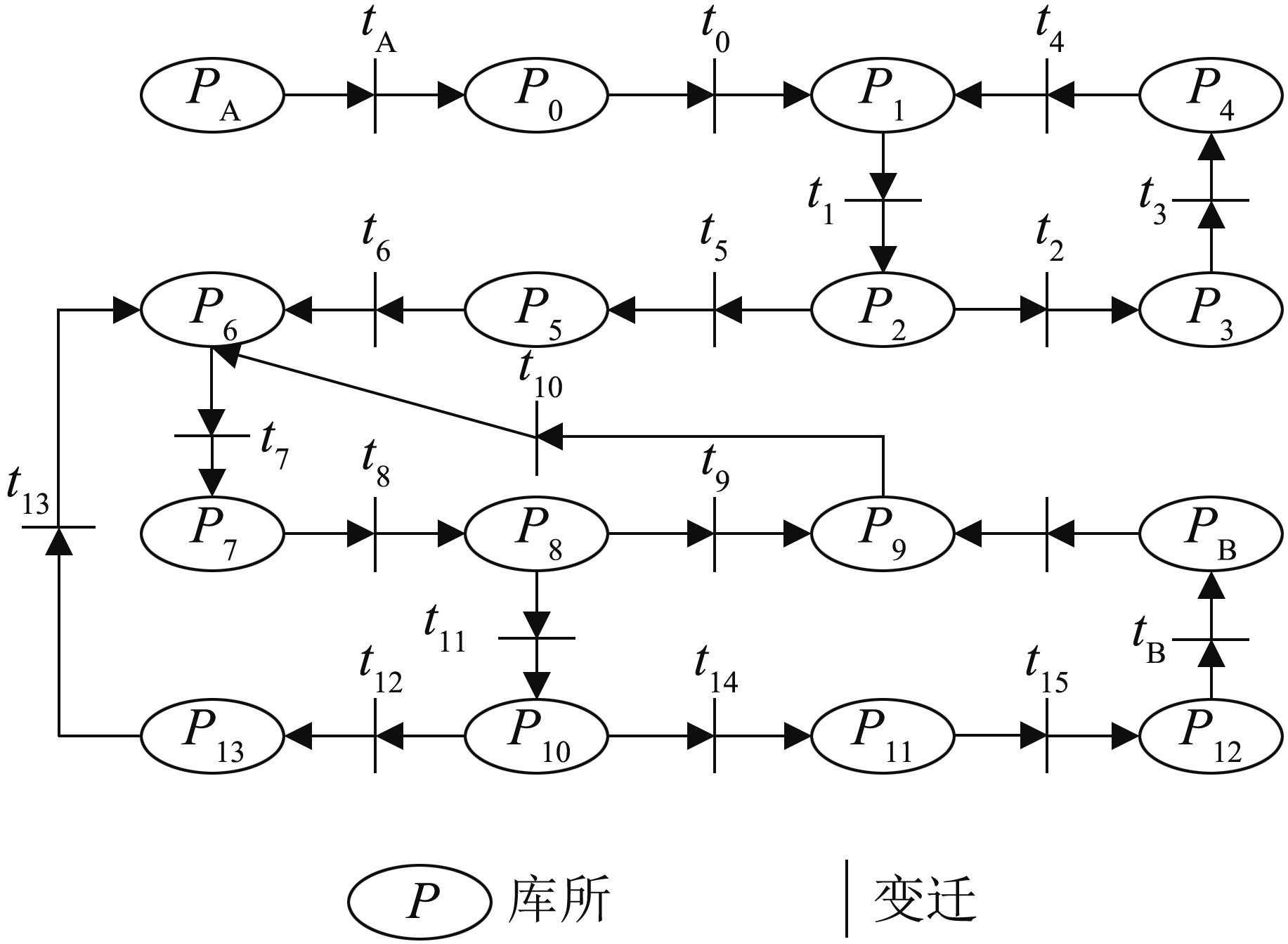
Table 1
Location and meaning
| 库所 | 含义 | 库所 | 含义 |
|---|---|---|---|
| PA | 接收任务 | P7 | 轨迹优化 |
| P0 | 分解任务 | P8 | 机器人动作 |
| P1 | 定位 | P9 | 发生故障 |
| P2 | 空间识别 | P10 | 末端机构动作 |
| P3 | 超出操作范围 | P11 | 空抓状态 |
| P4 | 位姿调整 | P12 | 停止操作 |
| P5 | 在可操作范围内 | P13 | 抓取状态 |
| P6 | 轨迹规划 | PB | 初始待机状态 |
Table 2
Statistics of the experimental results of robot assembly operations
| 序号 | 路径长度/mm | 是否到达 | 关键点/个 |
|---|---|---|---|
| 1 | 472.3 | 是 | 3 |
| 2 | 204.6 | 是 | 2 |
| 3 | 541.4 | 是 | 3 |
| 4 | 478.1 | 是 | 3 |
| 5 | 164.6 | 是 | 2 |
| 6 | 353.3 | 是 | 3 |
| 7 | 182.4 | 是 | 2 |
| 8 | 212.5 | 是 | 2 |
| 9 | 165.8 | 是 | 2 |
| 10 | 219.2 | 是 | 2 |
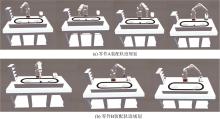
Fig. 6
Simulation of multi-part assembly in robot virtual environment
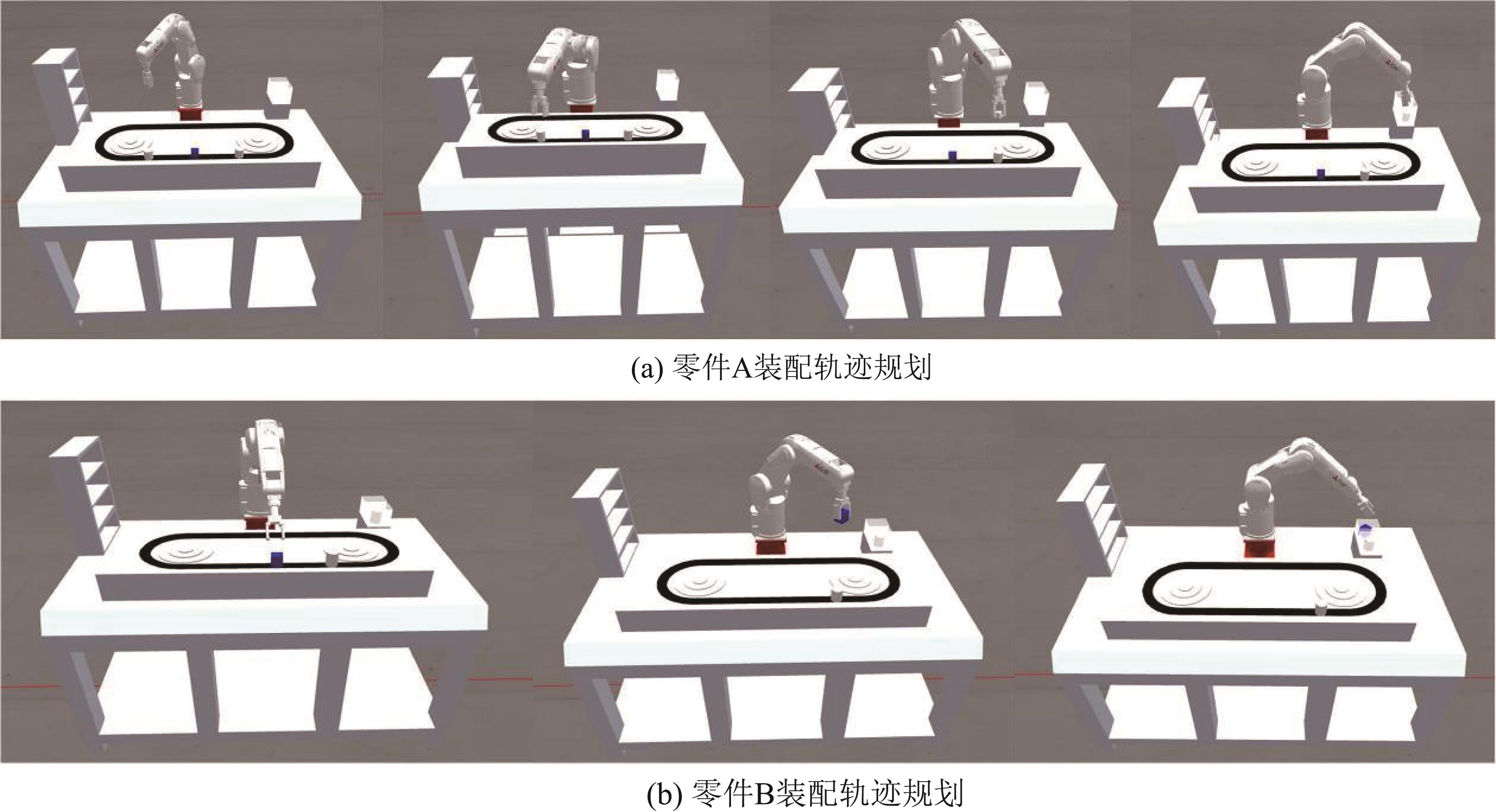

Fig. 7
Simulation of multi-part assembly in robot virtual environment
Table 3
Maximum value of joints rotation and error angle in trajectory motion
| 装配行为轨迹 | 自由轨迹 | |||||||
|---|---|---|---|---|---|---|---|---|
| 关节 | 运动范围 | 误差范围 | 运动范围 | 误差范围 | ||||
| 最小值 | 最大值 | 最小值 | 最大值 | 最小值 | 最大值 | 最小值 | 最大值 | |
| Joint_1 | -22.800 | 40.100 | -0.138 | 0.122 | -6.220 | 39.800 | -0.131 | 0.148 |
| Joint_2 | -9.300 | 30.300 | -0.092 | 0.077 | -43.200 | 19.900 | -0.112 | 0.125 |
| Joint_3 | -30.900 | 20.200 | -0.092 | 0.097 | -38.400 | 22.200 | -0.139 | 0.155 |
| Joint_4 | -89.900 | 11.100 | -0.232 | 0.277 | -89.400 | 63.600 | -0.255 | 0.282 |
| Joint_5 | -47.900 | 39.500 | -0.185 | 0.155 | -48.200 | 79.400 | -0.282 | 0.216 |
| Joint_6 | -0.100 | 62.900 | -0.270 | 0.232 | -28.600 | 90.000 | -0.212 | 0.226 |
| 1 | Wang Yue, Xiong Rong, Yu Hongsheng, et al. Perception of Demonstration for Automatic Programing of Robotic Assembly: Framework, Algorithm, and Validation[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(3): 1059-1070. |
| 2 | Olabi A, Damak M, Bearee R, et al. Improving the Accuracy of Industrial Robots by Offline Compensation of Joints Errors[C]//2012 IEEE International Conference on Industrial Technology. Piscataway, NJ, USA: IEEE, 2012: 492-497. |
| 3 | 张霖, 陆涵. 从建模仿真看数字孪生[J]. 系统仿真学报, 2021, 33(5): 995-1007. |
| Zhang Lin, Lu Han. Discussing Digital Twin from of Modeling and Simulation[J]. Journal of System Simulation, 2021, 33(5): 995-1007. | |
| 4 | 张冰, 李欣, 万欣欣. 从数字孪生到数字工程建模仿真迈入新时代[J]. 系统仿真学报, 2019, 31(3): 369-376. |
| Zhang Bing, Li Xin, Wan Xinxin. From Digital Twin to Digital Engineering Modeling and Simulation Entering a New Era[J]. Journal of System Simulation, 2019, 31(3): 369-376. | |
| 5 | Tao Fei, Zhang Meng, Liu Yushan, et al. Digital Twin Driven Prognostics and Health Management for Complex Equipment[J]. CIRP Annals, 2018, 67(1): 169-172. |
| 6 | Tao Fei, Zhang He, Liu Ang, et al. Digital Twin in Industry: State-of-the-art[J]. IEEE Transactions on Industrial Informatics, 2019, 15(4): 2405-2415. |
| 7 | Grieves M. Digital Twin: Manufacturing Excellence Through Virtual Factory Replication[EB/OL]. [2022-02-12]. . |
| 8 | 陶飞, 刘蔚然, 张萌, 等. 数字孪生五维模型及十大领域应用[J]. 计算机集成制造系统, 2019, 25(1): 1-18. |
| Tao Fei, Liu Weiran, Zhang Meng, et al. Five-dimension Digital Twin Model and Its Ten Applications[J]. Computer Integrated Manufacturing Systems, 2019, 25(1): 1-18. | |
| 9 | 侯正航, 何卫平. 基于数字孪生的飞机装配状态巡检机器人的建模与控制[J]. 计算机集成制造系统, 2021, 27(4): 981-989. |
| Hou Zhenghang, He Weiping. Modeling and Control of Digital Twin-based Aircraft Assembly State Inspection Robot[J]. Computer Integrated Manufacturing Systems, 2021, 27(4): 981-989. | |
| 10 | 肖通, 江海凡, 丁国富, 等. 五轴磨床数字孪生建模与监控研究[J]. 系统仿真学报, 2021, 33(12): 2880-2890. |
| Xiao Tong, Jiang Haifan, Ding Guofu, et al. Research on Digital Twin-based Modeling and Monitoring of Five-axis Grinder[J]. Journal of System Simulation, 2021, 33(12): 2880-2890. | |
| 11 | 李幸刚, 张亚萍, 杨雨薇. 一种基于邻域扩展聚类的去噪算法[J]. 系统仿真学报, 2017, 29(11): 2663-2669, 2677. |
| Li Xinggang, Zhang Yaping, Yang Yuwei. Denoising Algorithm Based on Neighborhood Expansion Clustering[J]. Journal of System Simulation, 2017, 29(11): 2663-2669, 2677. | |
| 12 | Tipary B, Erdős Gábor. Generic Development Methodology for Flexible Robotic Pick-and-place Workcells Based on Digital Twin[J]. Robotics and Computer-Integrated Manufacturing, 2021, 71: 102140. |
| 13 | Zhang Song. High-speed 3D Shape Measurement with Structured Light Methods: A review[J]. Optics and Lasers in Engineering, 2018, 106: 119-131. |
| 14 | 李光, 付涛, 张天赐. 基于PCL库的矿场环境点云配准方法研究[J]. 机械设计, 2021, 38(增1): 174-177. |
| Li Guang, Fu Tao, Zhang Tianci. Research on Point Cloud Registration Method of Mine Environment Based on PCL[J]. Journal of Machine Design, 2021, 38(S1): 174-177. | |
| 15 | Haddadi A, Hashtrudi-Zaad K. Real-time Identification of Hunt-crossley Dynamic Models of Contact Environments[J]. IEEE Transactions on Robotics, 2012, 28(3): 555-566. |
| 16 | Li Xin, He Bin, Zhou Yanmin, et al. Multisource Model-driven Digital Twin System of Robotic Assembly[J]. IEEE Systems Journal, 2021, 15(1): 114-123. |
| 17 | 周学广, 吕伟栋, 袁志民. 基于着色Petri网的舰艇指挥控制信息流建模研究[J]. 系统仿真学报, 2019, 31(5): 828-842. |
| Zhou Xueguang, Weidong Lü, Yuan Zhimin. Colored Petri Net Based Modeling on Warship Command and Control Information Flow[J]. Journal of System Simulation, 2019, 31(5): 828-842. | |
| 18 | 孔庆艳, 袁杰, 郭俊辉. 自主式追踪机器人终端行为的Petri网建模[J]. 计算机应用研究, 2016, 33(11): 3303-3306. |
| Kong Qingyan, Yuan Jie, Guo Junhui. Terminal Behavior Modeling for Autonomous Tracking Robots Using Petri Nets[J]. Application Research of Computers, 2016, 33(11): 3303-3306. | |
| 19 | Lacevic B, Rocco P. Kinetostatic Danger Field-A Novel Safety Assessment for Human-Robot Interaction[C]//2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ, USA: IEEE, 2010: 2169-2174. |
| 20 | Lacevic B, Rocco P. Safety-oriented Control of Robotic Manipulators-a Kinematic Approach[J]. IFAC Proceedings Volumes, 2011, 44(1): 11508-11513. |
| 21 | 杨艳芳, 贺焕, 舒亮, 等. 断路器柔性装配数字孪生机器人及其运动控制[J]. 计算机集成制造系统, 2020, 26(11): 2915-2926. |
| Yang Yanfang, He Huan, Shu Liang, et al. Digital Twin Robot and Its Motion Control for Flexible Assembly of Circuit Breaker[J]. Computer Integrated Manufacturing Systems, 2020, 26(11): 2915-2926. | |
| 22 | 郭飞燕, 刘检华, 邹方, 等. 数字孪生驱动的装配工艺设计现状及关键实现技术研究[J]. 机械工程学报, 2019, 55(17): 110-132. |
| Guo Feiyan, Liu Jianhua, Zou Fang, et al. Research on the State-of-art, Connotation and Key Implementation Technology of Assembly Process Planning with Digital Twin[J]. Journal of Mechanical Engineering, 2019, 55(17): 110-132. |
| [1] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| [2] | Nan Yandong, Zhu Jinda, Lu Xinbin, Qin Zhiying, Qi Dandan, Ding Zhiheng. State Monitoring of Nuclear Power Connection Sleeve Quality Inspection Equipment Driven by Digital Twin [J]. Journal of System Simulation, 2026, 38(4): 1004-1017. |
| [3] | Yan Dong, Yang Hanzhe, Jiang Fangfang, Liu Chengbao, Zhang Peng. Design and Application of Collaborative Simulation System for Satellite Constellation Flight Missions [J]. Journal of System Simulation, 2026, 38(4): 1067-1079. |
| [4] | Wang Ziying, Sun Congjun, Li Guihu, Zhang Tianhao. Virtual Train Operation Platform Based on Digital Twin [J]. Journal of System Simulation, 2026, 38(3): 736-745. |
| [5] | Qu Jing, Fang Kaining, Zhu Shantong, Bu Lingguo. Virtual Reality Rehabilitation Training System Based on Multimodal Brain-computer Interface [J]. Journal of System Simulation, 2026, 38(1): 125-135. |
| [6] | Zhu Yuning, Yang Meng, Chen Tianyue, Meng Weiliang. VRBT: VR Badminton Training with Multitask Injury Alerts based on Lightweight 3D Skeletal Reconstruction [J]. Journal of System Simulation, 2026, 38(1): 225-234. |
| [7] | Lu Houjun, Zhu Yifei, Rong Yanping, Zhang Wanghui. Digital Twin Modeling Method for Bulk Cargo Stacks Based on 2D LiDAR [J]. Journal of System Simulation, 2025, 37(9): 2269-2286. |
| [8] | Liu Yongkui, Yang Kang, Tuo Benben, Pan Yaduo, Wang Xinyu, Wang Yihan, Gong Yongqian, Zhang Lin, Wang Lihui, Lin Tingyu, Zi Bin, Li Yuan, You Wei, Xu Xun. Digital Twinned Industrial Robot: Conceptual Framework, Key Technologies, and Case Study [J]. Journal of System Simulation, 2025, 37(7): 1723-1752. |
| [9] | Liu Tao, Li Hanxi, Yin Yong, Liu Jialun. Research Review of Intelligent Navigation Simulation Technology and Its Applications [J]. Journal of System Simulation, 2025, 37(7): 1684-1709. |
| [10] | Chen Qinghua, Liang Zuoyou, Guan Weijuan, Ji Jiadong, Liu Ping. Construction Method of Digital Twin System for High-low Temperature Test Chamber [J]. Journal of System Simulation, 2025, 37(6): 1400-1411. |
| [11] | Zhang Wenjia, Zhang Heming. Research on Grey-box Modeling Method of Digital Twins for Cantilever Structure [J]. Journal of System Simulation, 2025, 37(5): 1158-1168. |
| [12] | Zhang Huimai, Hu Xiaoya, Zhou Chunjie. Digital Twin Framework for the Generation and Optimization of Security Policies for TSN Industrial Control Systems [J]. Journal of System Simulation, 2025, 37(4): 861-874. |
| [13] | Jiang Lun, Wang Dajiang, Sun Wenlei, Bao Shenghui, Liu Han, Chang Saike. Research on Transformer Fault Diagnosis Method Based on Digital Twin [J]. Journal of System Simulation, 2025, 37(3): 775-790. |
| [14] | Hu Tianxiang, Ye Hui, Yang Xiaofei. Construction of a Digital Twin-based Ship Manufacturing Workshop Monitoring System [J]. Journal of System Simulation, 2025, 37(2): 517-528. |
| [15] | Wu Shuheng, Liu Yongkui, Zhang Lin, Xiao Yingying, Wang Lihui. Lightweight Assembly Workpiece Detection Algorithm Based on Improved YOLOv8 [J]. Journal of System Simulation, 2025, 37(12): 3099-3111. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
