

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (3): 484-493.doi: 10.16182/j.issn1004731x.joss.21-1166
• Papers • Previous Articles Next Articles
Mingbao Pang( ), Zhen Liu
), Zhen Liu
Received:2021-11-12
Revised:2021-12-20
Online:2023-03-30
Published:2023-03-22
CLC Number:
Mingbao Pang, Zhen Liu. Simulation on Cooperative Control of Connected and Automated Vehicles at Interchange Based on Petri Net[J]. Journal of System Simulation, 2023, 35(3): 484-493.
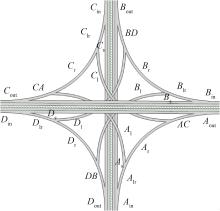
Fig. 1
Semi-directional interchange and its surrounding sections
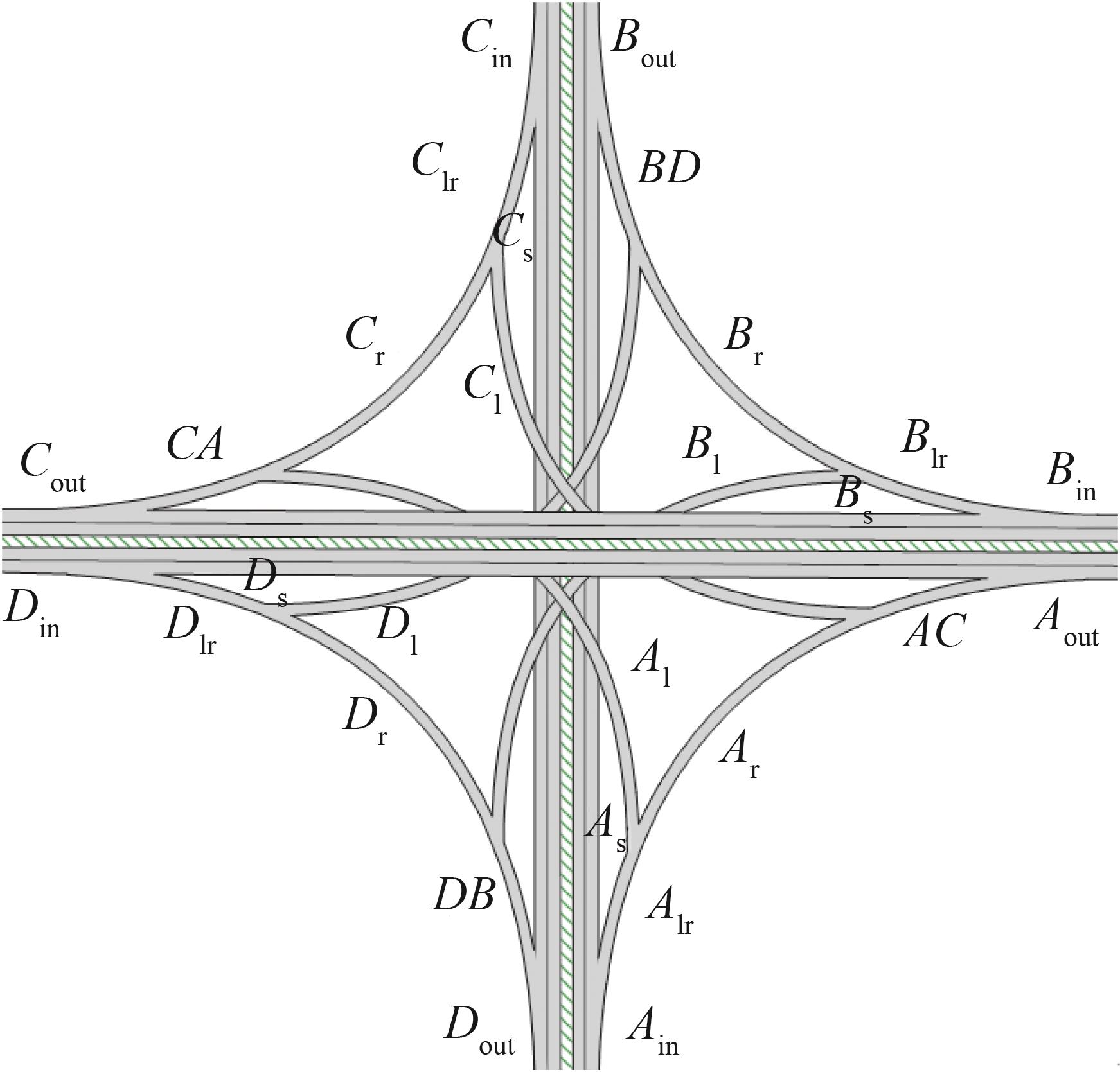
Table 1
Key parameters of CAVs passing through interchange model
| 参数 | 定义 |
|---|---|
| Iw | 车辆所在车道 |
| 车辆即将进入Ain区域,触发时延变迁 | |
| 车辆已经处于Ain区域 | |
| ρ | 该路段上的车减速等待获取通行优先权 |
| 车辆直行,触发时延变迁 | |
| 车辆左右转,触发时延变迁 | |
| 车辆从Ain区域直行至As区域 | |
| 车辆从Ain区域右转至Alr区域 | |
| 车辆完成As区域的穿行,触发时延变迁 | |
| 车辆左转,触发时延变迁 | |
| 车辆从Alr区域左转至Al区域 | |
| 车辆完成Al区域的穿行,触发时延变迁 | |
| 车辆已经处于CA区域 | |
| 车辆完成CA区域的穿行,触发时延变迁 | |
| 车辆从Aout区域驶离立交桥 | |
| 车辆完成Aout区域的穿行,触发时延变迁 |

Fig. 2
TdPN model of complete process of CAVs passing through interchange
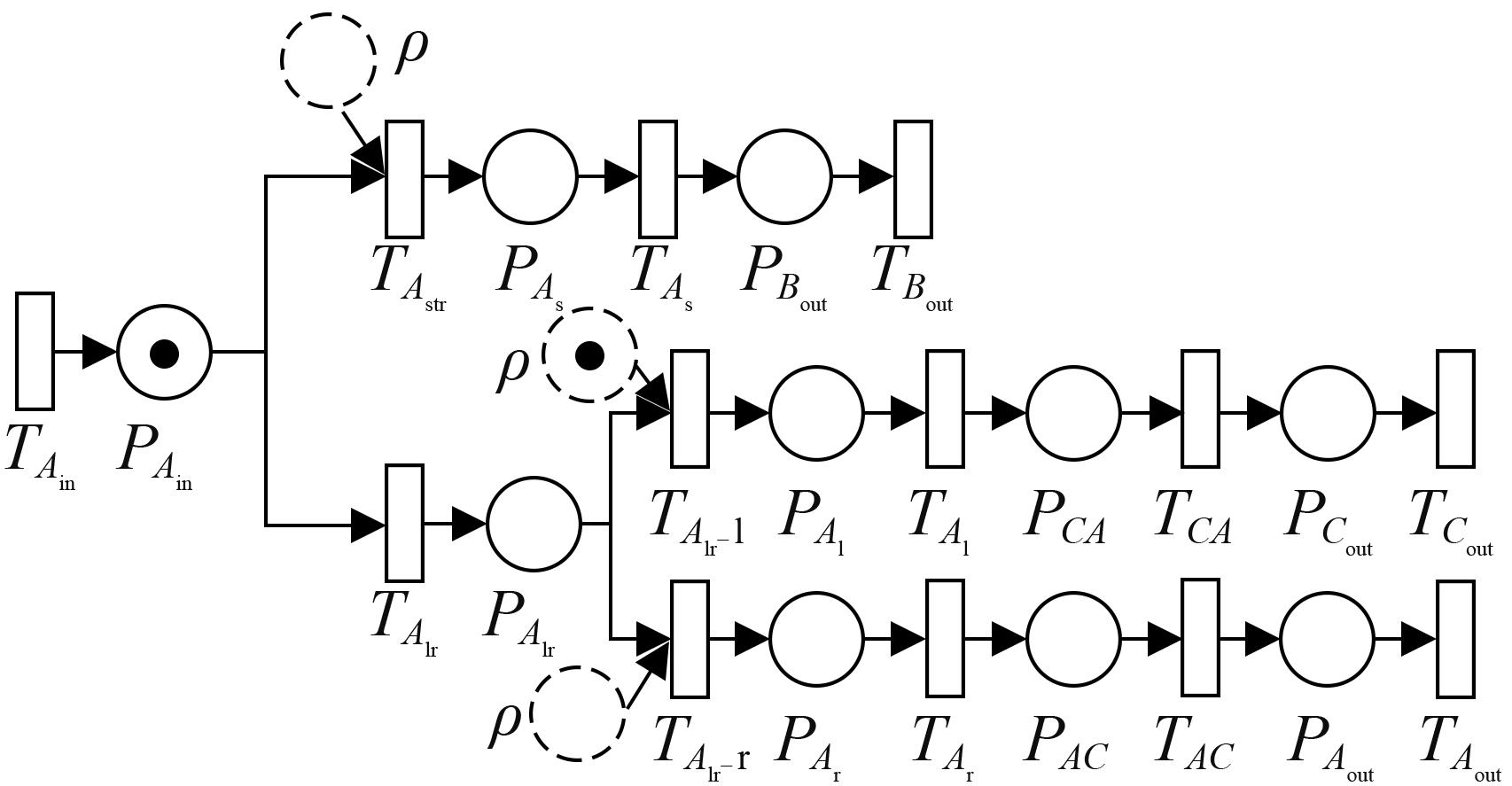
Table 2
Coordination unit traffic flow members
| 协同单元编号 | 成员 |
|---|---|
| 1 | |
| 2 | |
| 3 |
Fig. 3
TdPN model of CAVs cooperative control
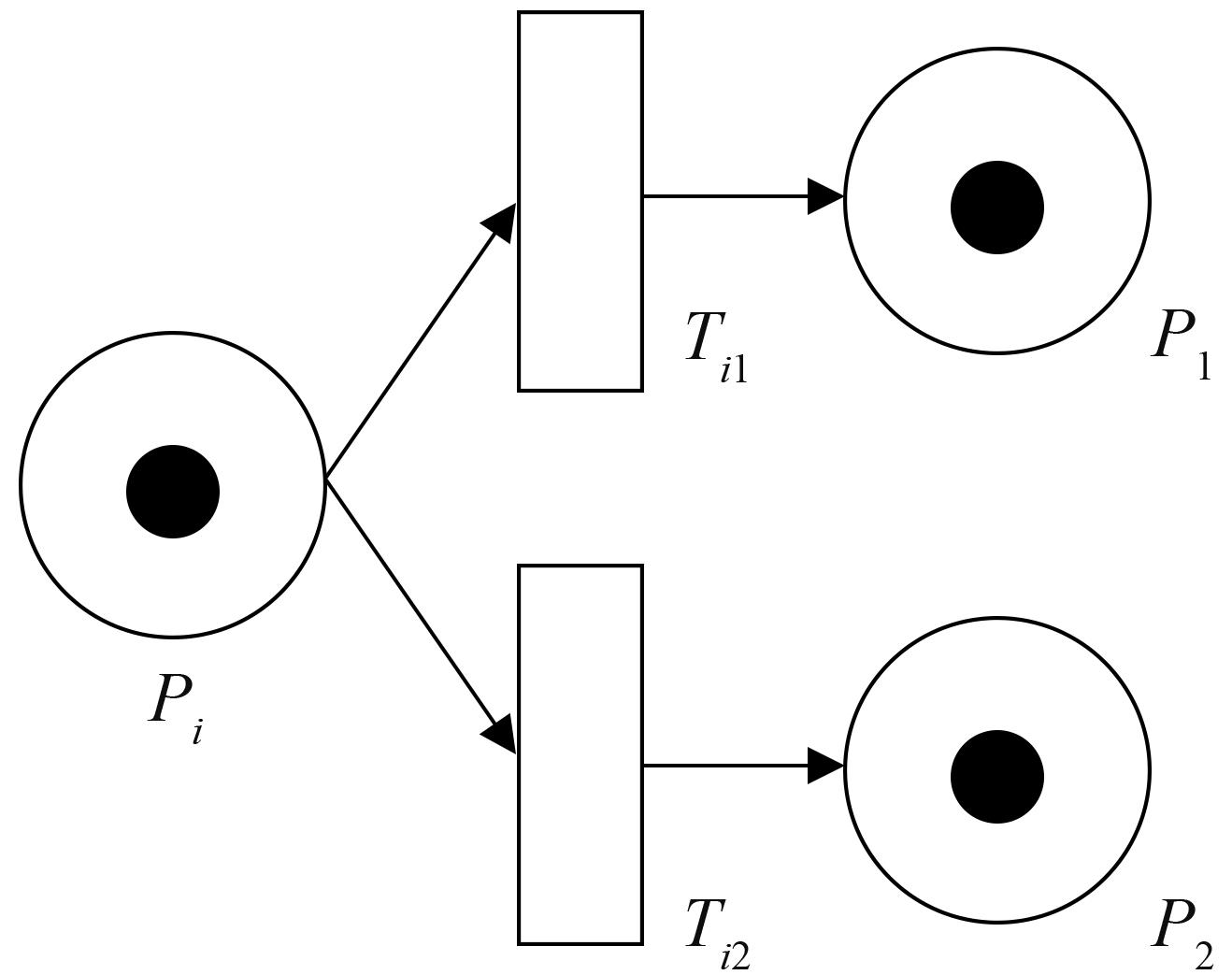
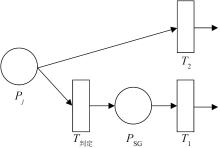
Fig. 4
TdPN model for coordination unit vehicle priority determination
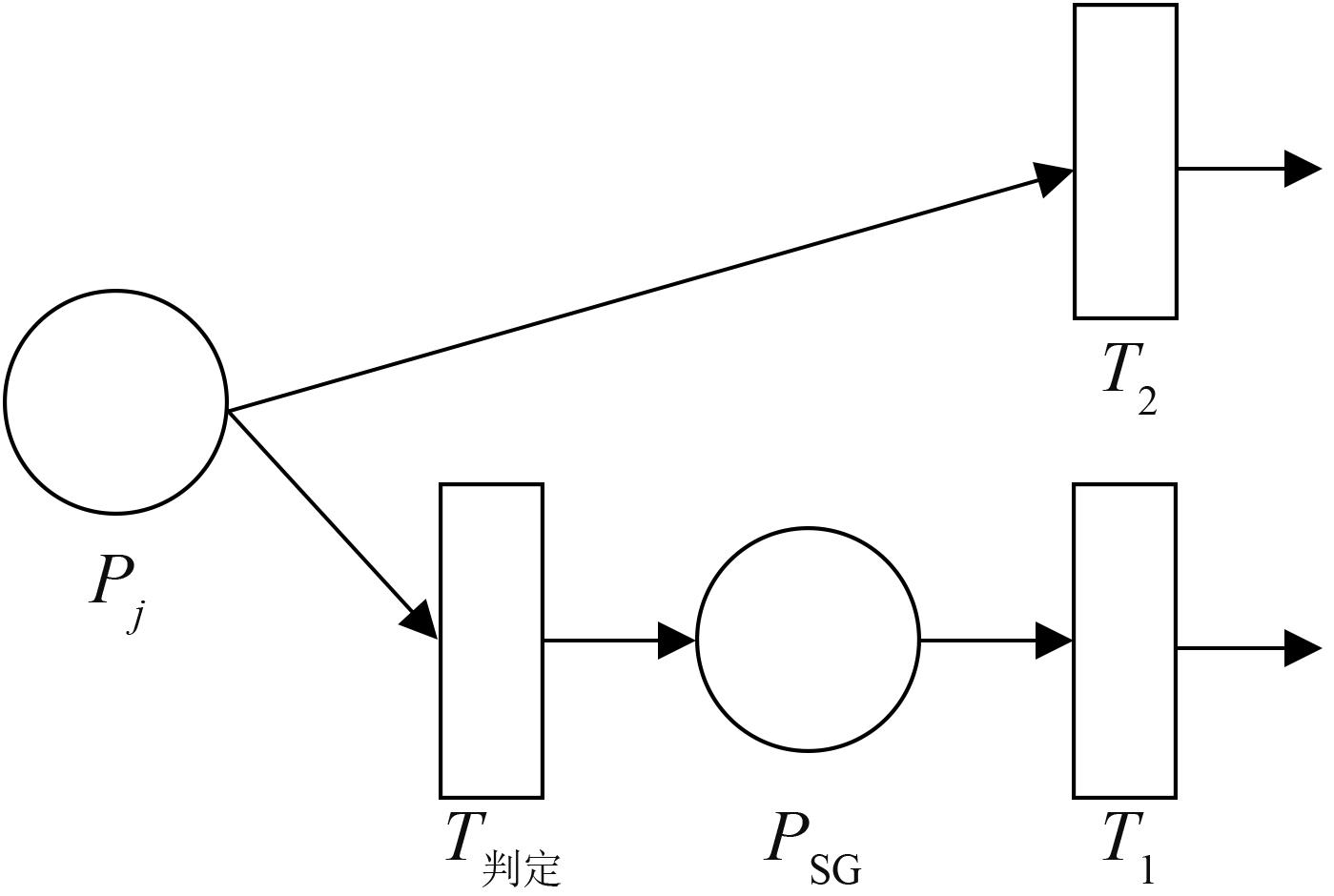
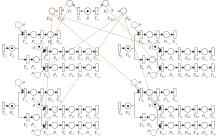
Fig. 5
TdPN model of interchange
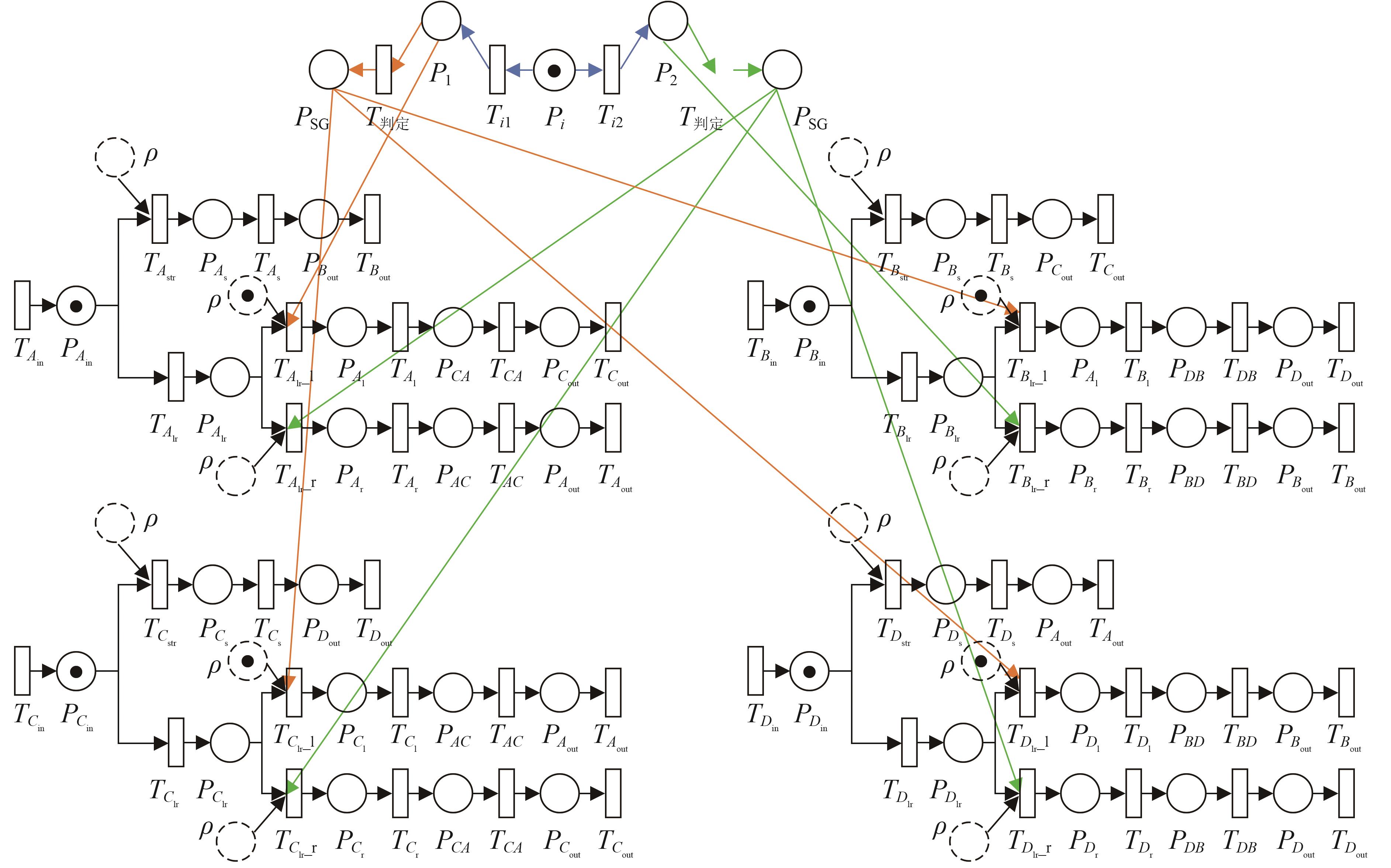
Table 3
Definition of parameters
| 变量 | 定义 | 变量 | 定义 |
|---|---|---|---|
| w | 车辆转向, w={ Al、 Ar、 As、 Bl、 Br、 Bs、 Cl、 Cr、 Cs、 Dl、 Dr、 Ds} | tn | 协同单元车n减速到vmax所需时间 |
| p | 协同单元编号, p=1表示由Al、 Bl、 Cl、 Dl组成的协同单元; p=2表示由Ar、 Br、 Cr、 Dr组成; p=3表示由As、 Bs、 Cs、 Ds组成 | t1 | 车<w, q>以当前减速度减速至vmax所需时间 |
| t2 | 车<w, q>以vmax至下游匝道合流区截面时间 | ||
| wp | 与车流w不冲突的协同单元车流 | v<w, q> | 车<w, q>的当前速度 |
| <w, q> | 车流w的第q辆车 | a<w, q> | 车<w, q>的当前减速度, a<w, q> >0 |
| t | 车<w, q>到其下游主线合流区截面所需时间 | vcom_n | 协同单元车n的当前速度 |
| t | 车<w, q>到其下游匝道合流区截面所需时间 | acom_n | 协同单元车n的当前减速度,acom_n >0 |
| t | 最优车辆到其下游匝道合流区截面所需时间 | vn_i | 协同单元车n前方第i辆车的当前速度 |
| s<w, q>_1 | 车<w, q>到其下游主线分流区截面的距离 | an_i | 协同单元车n前方第i辆车当前减速度, an_i >0 |
| s<w, q>_2 | 车<w, q>到其下游匝道分流区截面的距离 | a | 施加控制后车辆的理论减速度, a>0 |
| s<w, q>_3 | 车<w, q>到其下游匝道合流区截面的距离 | vopt_com_n | 协同单元车n优化后的速度 |
| s<w, q>_4 | 车<w, q>到其下游主线合流区截面的距离 | aopt_com_n | 协同单元车n优化后的减速度, aopt_com_n >0 |
| vmax | 匝道允许的最高行驶速度 | vopt_n_i | 协同单元车n前方第i辆车优化后的速度 |
| scom_n_3 | 协同单元车n到其下游匝道合流区截面距离 | aopt_n_i | 协同单元车n前方第i辆车优化后减速度, aopt_n_i >0 |
| sn | 协同单元车n匀减速行驶距离 | T | 仿真步长 |
Fig. 6
Flow chart of CAVs traffic control
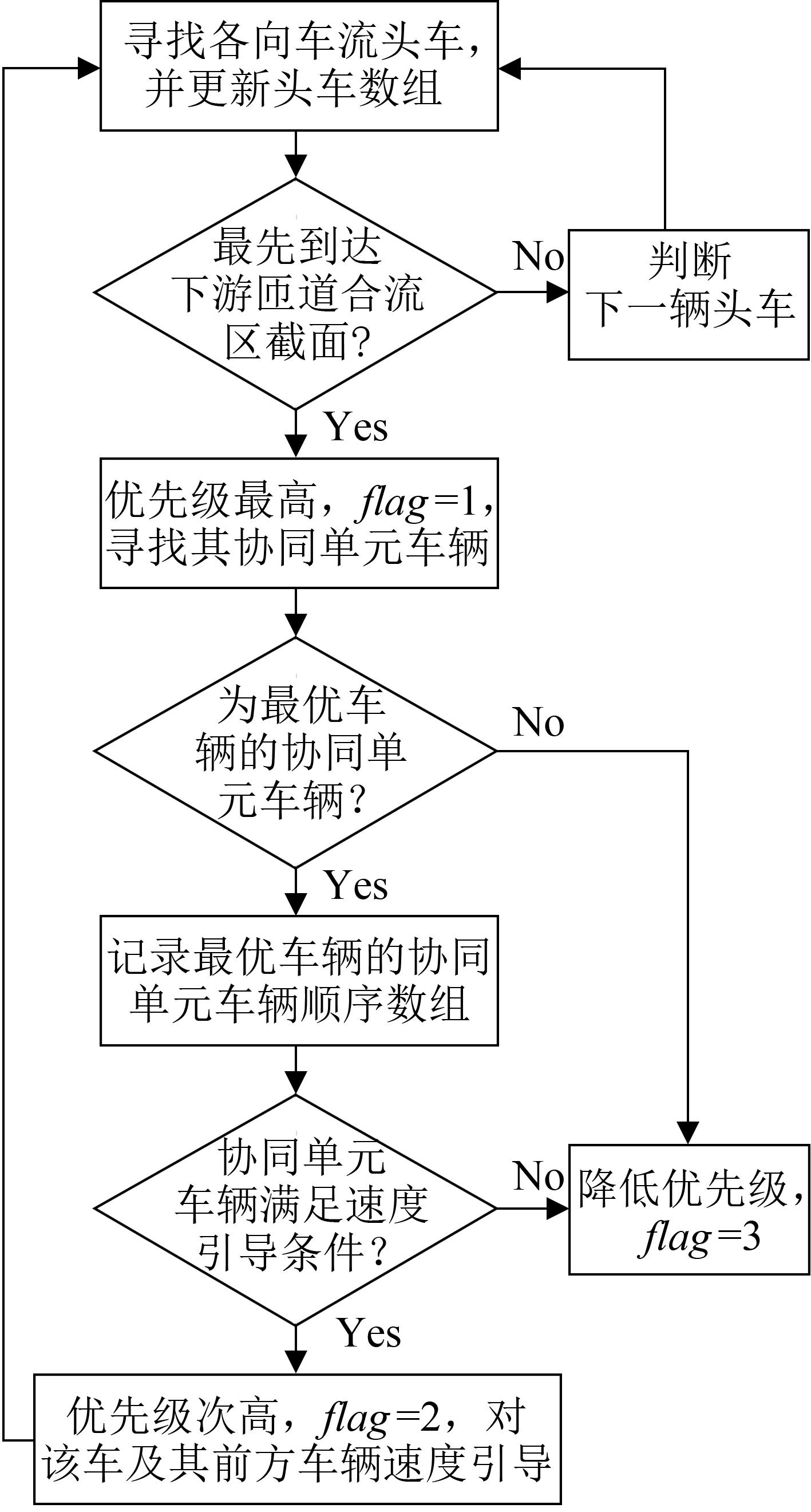
Fig. 7
Simulation scenario
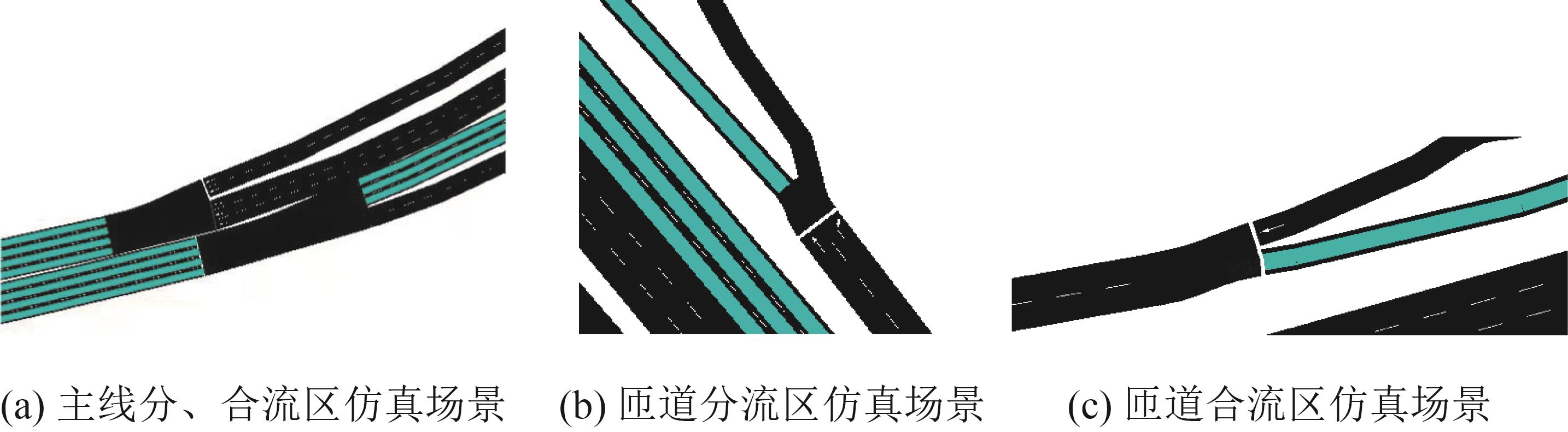

Fig. 8
Comparison of control parameters(11 200 veh/h)
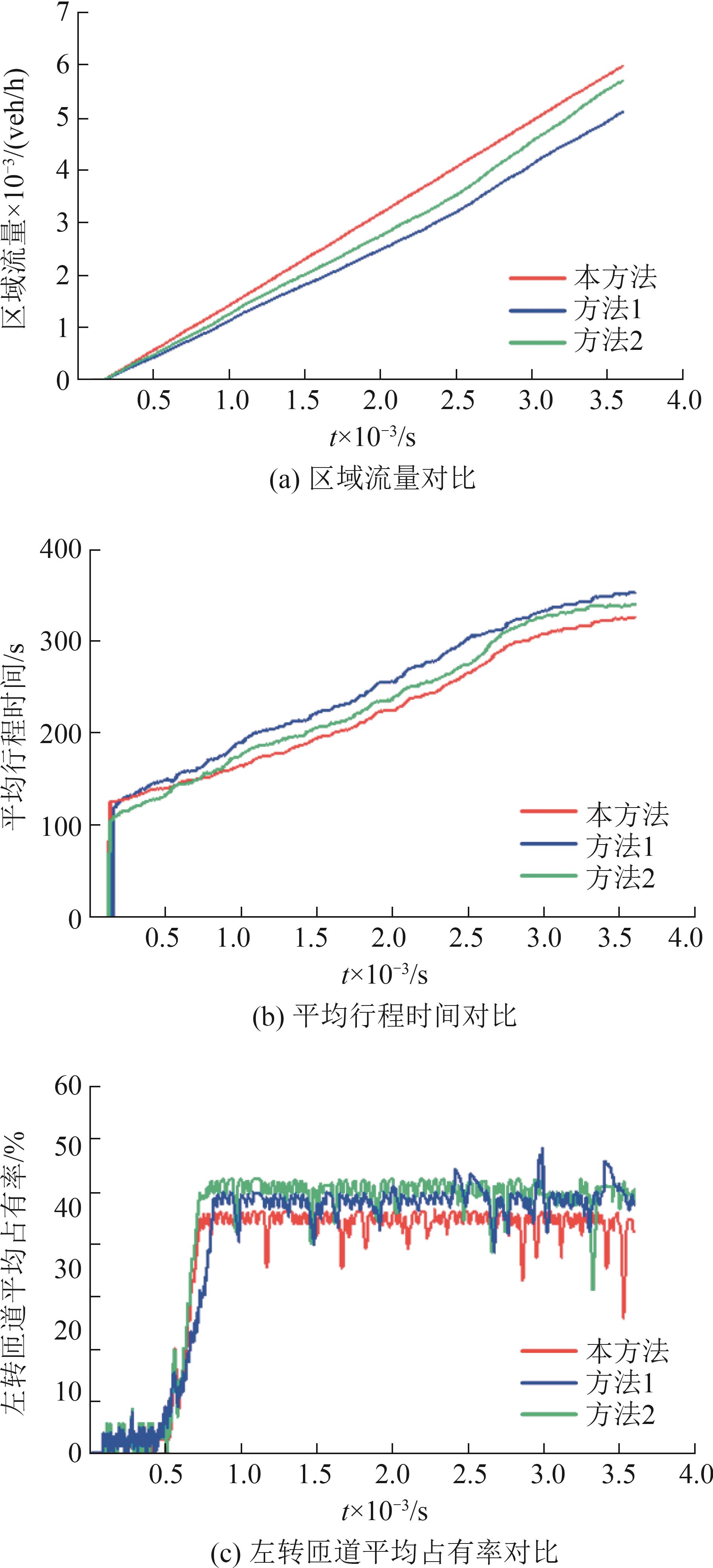

Fig. 9
Comparison of control parameters(16 000 veh/h)
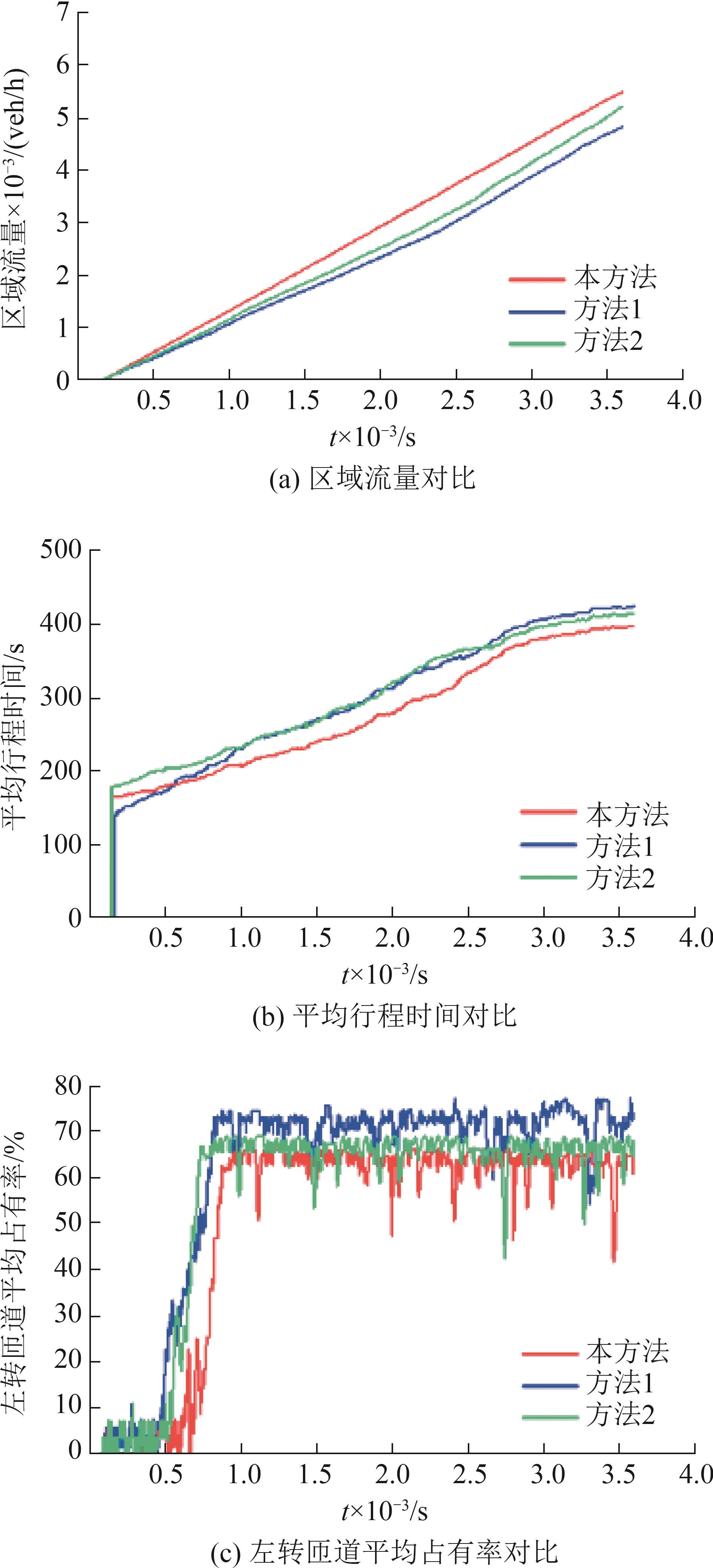
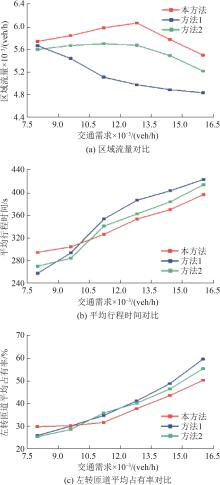
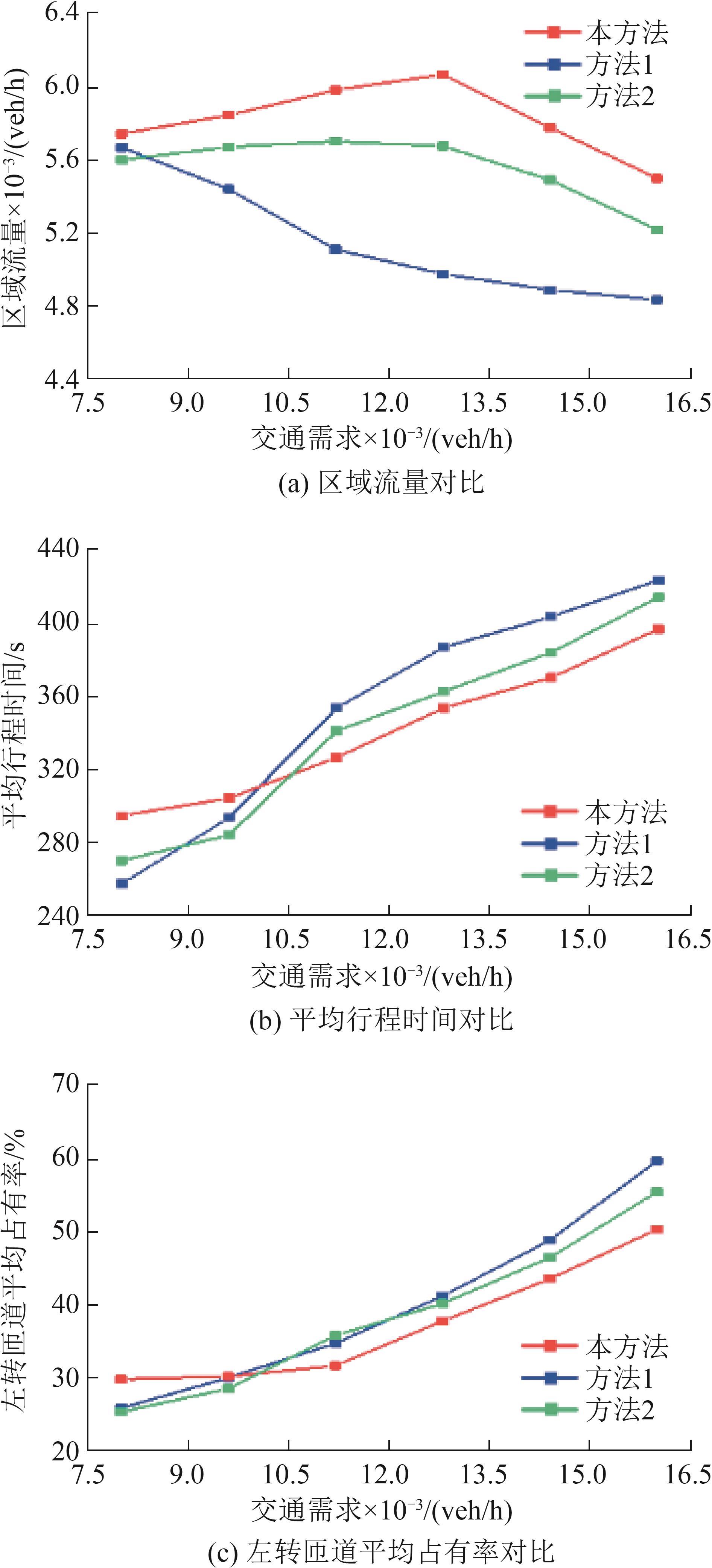
Fig. 10
Comparison of control performance under different traffic demands
| 1 | Yang X F, Cheng Y, Chang G L. Integration of Adaptive Signal Control and Freeway Off-Ramp Priority Control for Commuting Corridors[J]. Transportation Research Part C (S0968-090X), 2018, 86: 328-345. |
| 2 | Chen Y Y, Chen Y H, Chang G L. Optimizing the Integrated Off-Ramp Signal Control to Prevent Queue Spillback to the Freeway Mainline[J]. Transportation Research Part C (S0968-090X), 2021, 128: 103220. |
| 3 | Hu X W, Sun J. Trajectory Optimization of Connected and Autonomous Vehicles at a Multilane Freeway Merging Area[J]. Transportation Research Part C (S0968-090X), 2019, 101: 111-125. |
| 4 | 杨敏, 王立超, 张健, 等. 面向智慧高速的合流区协作车辆冲突解脱协调方法[J]. 交通运输工程学报, 2020, 20(3): 217-224. |
| Yang Min, Wang Lichao, Zhang Jian, et al. Collaborative Method of Vehicle Conflict Resolution in Merging Area for Intelligent Expressway[J]. Journal of Traffic and Transportation Engineering, 2020, 20(3): 217-224. | |
| 5 | 汪宝, 高林杰, 隽志才. 基于避险时间的交织区车辆换道冲突分析[J]. 系统仿真学报, 2018, 30(9): 3306-3311. |
| Wang Bao, Gao Linjie, Zhicai Juan. Analysis of Lane Changing Conflict Based on TTA in Expressway Weaving Area[J]. Journal of System Simulation, 2018, 30(9): 3306-3311. | |
| 6 | 刘芳宏. 基于实时OD信息的城市快速路入口匝道协调控制[D]. 长春: 吉林大学, 2020. |
| Liu Fanghong. Coordinated On-Ramp Metering of Urban Expressway Based on Real-Time OD Information[D]. Changchun: Jilin University, 2020. | |
| 7 | 庞明宝, 夏泽民, 栾燕海. 城市快速路多匝道协调控制信号施加策略仿真[J]. 系统仿真学报, 2018, 30(8): 3050-3057. |
| Pang Mingbao, Xia Zemin, Luan Yanhai. Inputting Strategy Simulation of Multi-ramp Coordinated Control Signal for Urban Expressway[J]. Journal of System Simulation, 2018, 30(8): 3050-3057. | |
| 8 | Algomaiah M, Li Z X. Utilizing Lane-Based Strategy to Incorporate Mixed Traffic in Interchange Control for Connected and Autonomous Vehicles[J]. Transportation Research Record (S0361-1981), 2019, 2673(5): 454-465. |
| 9 | 林宣财, 曹骏驹, 周兴顺, 等. 互通式立交单车道匝道宽度取值与单出入口优化设计[J]. 公路交通科技, 2021, 38(9): 123-131. |
| Lin Xuancai, Cao Junju, Zhou Xingshun, et al. Value of Single Lane Ramp Width and Optimization Design of Single Entrance and Exit for Interchange[J]. Journal of Highway and Transportation Research and Development, 2021, 38(9): 123-131. | |
| 10 | 常玉林, 张成祥, 张鹏, 等. 车联网环境下基于间隙优化的无信号交叉口车速控制方法[J]. 重庆理工大学学报(自然科学), 2021, 35(3): 10-17. |
| Chang Yulin, Zhang Chengxiang, Zhang Peng, et al. A Speed Control Method of Non-signalized Intersection Based on Gap Optimization under Connected Vehicle Environment[J]. Journal of Chongqing University of Technology(Natural Science), 2021, 35(3): 10-17. | |
| 11 | Han X, Ma R, Zhang H M. Energy-Aware Trajectory Optimization of CAV Platoons through a Signalized Intersection[J]. Transportation Research Part C (S0968-090X), 2020, 118: 96-102. |
| 12 | Wang C, Dai Y L, Xia J X. A CAV Platoon Control Method for Isolated Intersections: Guaranteed Feasible Multi-objective Approach with Priority[J]. Energies (S1996-1073), 2020, 13(3): 367-379. |
| 13 | 蒋阳升, 蒋浩然, 姚志洪, 等. 基于虚拟车队的自动交叉路口车辆时序优化模型[J]. 中国公路学报, 2022, 35(8): 291-303. |
| Jiang Yangsheng, Jiang Haoran, Yao Zhihong, et al. Vehicle Schedule Optimization Model for Autonomous Intersection Based on Virtual Platoon[J]. China Journal of Highway and Transport, 2022, 35(8): 291-303. | |
| 14 | 乔嘉林, 黄向东, 杨义繁, 等. 基于着色Petri网的HDFS数据一致性建模与分析[J]. 软件学报, 2021, 32(10): 2993-3013. |
| Qiao Jialin, Huang Xiangdong, Yang Yifan, et al. HDFS Data Consistency Modelling and Analysis Based on Colored Petri Net[J]. Journal of Software, 2021, 32(10): 2993-3013. | |
| 15 | 张卫, 朱信忠, 顾新建, 等. 工业互联网环境下的智能制造服务流程纵向集成[J]. 系统工程理论与实践, 2021, 41(7): 1761-1770. |
| Zhang Wei, Zhu Xinzhong, Gu Xinjian, et al. Intelligent Manufacturing Service Flow Vertical Integration in Industrial Internet Environment[J]. System Engineering Theory and Practice, 2021, 41(7): 1761-1770. | |
| 16 | Guzman J A. A Cyber-Physical Systems Approach to Collaborative Intersection Management and Control[J]. IEEE Access (S2169-3536), 2021, 9: 99617-99632. |
| 17 | Mahajan Niharika, Hegyi Andreas,Goof Sterk van de Weg, et al. Integrated Variable Speed Limit and Ramp Metering Control Against Jam Waves - a COSCAL v2 Based Approach[C]// 18th IEEE International Conference on Intelligent Transportation Systems. Spain: IEEE, 2015: 1156-1162. |
| 18 | Bhouri N, Haj Salem H. Isolated Versus Coordinated Ramp Metering: Field Evaluation Results of Travel Time Reliability and Traffic Impact[J]. Transportation Research Part C (S0968-090X), 2013, 28: 155-167. |
| [1] | Fan Zeng, He Mingjun, Xing Xiangyu. Research on Digital Simulation Method for Cognitive Load Evaluation of pilots [J]. Journal of System Simulation, 2025, 37(8): 1921-1932. |
| [2] | Huang Qiushi, Wang Yanyang, Wu Changliang, Huang Junfu, Zhang Shenggen, Luo Haoxuan. Cooperative Control Method of Mixed Traffic at Signalized Intersection [J]. Journal of System Simulation, 2025, 37(1): 271-283. |
| [3] | Deng Mingjun, Hu Xinxia, Li Xiang, Xu Liping. Arterial Coordination Optimization Method Based on Vehicle Speed Guidance and Inductive Control [J]. Journal of System Simulation, 2024, 36(6): 1309-1321. |
| [4] | Liu Shikun, Tang Yi, Liu Yonghong. Application of Driving Simulation Technology in Calibration of Traffic Simulation Parameters [J]. Journal of System Simulation, 2024, 36(6): 1359-1368. |
| [5] | Liu Bo, Lin Jianxin, Liu Yini, Zhang Dong. Optimization of Urban Traffic Microsimulation Model for Carbon Emission Reduction [J]. Journal of System Simulation, 2024, 36(4): 859-872. |
| [6] | Pan Chunrong, Cui Yu, Xiong Wenqing, Zhou Hao, Luo Jiliang. Research on Adaptive Scheduling of Single-arm Cluster Tools for Throughput Ratio of Multiple Wafer Types with Concurrent Processing [J]. Journal of System Simulation, 2024, 36(12): 2906-2916. |
| [7] | Yin Yanchao, Feng Jiasheng, Yi Bin, Li Wang, Yin Qingwen. Visual Monitoring System of Digital Twin Workshop for Process Manufacturing [J]. Journal of System Simulation, 2024, 36(1): 120-130. |
| [8] | Zhe Yan, Wei Liu, Yuyue Du. Modeling and Analysis of Metro Emergency Decision Based on Logical Game Probability Petri Net [J]. Journal of System Simulation, 2023, 35(7): 1602-1618. |
| [9] | Chuanliang Xia, Maibo Guo, Zhuangzhuang Wang, Yan Sun. Shared Subnet Synthesis and Application of Object-oriented PRES Net [J]. Journal of System Simulation, 2023, 35(4): 833-842. |
| [10] | Guangqiu Huang, He Wang. Dynamic Risk Assessment of VOCs Cross Regional Flow Based on Petri Nets [J]. Journal of System Simulation, 2023, 35(1): 57-68. |
| [11] | Yali Wu, Shuting He, Yanxi Yang, Lianqiang Feng, Fuqiang Wang, Yulu Chen. Scheduling Optimization of Aluminum Extrusion Production Line Based on Timed Petri Net and BSO Algorithm [J]. Journal of System Simulation, 2023, 35(1): 178-189. |
| [12] | Hong Zheng, Zerun Liu, Jianhua Huang, Shihui Qian. Verification of Transaction Ordering Dependence Vulnerability of Smart Contract Based on CPN [J]. Journal of System Simulation, 2022, 34(7): 1629-1638. |
| [13] | Qinglu Ma, Lin Zhang, Xinxin Yuan, Fengjie Liu. Continuous Simulation Technology for Multi-State Evolution of Urban Road Traffic [J]. Journal of System Simulation, 2022, 34(4): 847-855. |
| [14] | Guangqiu Huang, Tiantian Wu. Cause Analysis of VOCs Hazards in Related Areas Based on Object Function Petri Net [J]. Journal of System Simulation, 2022, 34(3): 470-481. |
| [15] | Jingwei Deng, Hanwu He, Yueming Wu, Jianhao Su. Fast generation Method of Multi-sensing Channel Fusion Virtual Experiment [J]. Journal of System Simulation, 2022, 34(12): 2639-2648. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
