

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (1): 1-12.doi: 10.16182/j.issn1004731x.joss.24-1005
• Special Column:Modeling,Simulation and Application for Intelligent Unmanned System • Next Articles
Zhang Lun1, Yang Mei1, Zhao Tuo2, Zhang Shuiku1, Huang Jian1
Received:2024-09-08
Revised:2024-12-12
Online:2025-01-20
Published:2025-01-23
Contact:
Yang Mei
CLC Number:
Zhang Lun, Yang Mei, Zhao Tuo, Zhang Shuiku, Huang Jian. Task Reallocation Method for Unmanned Swarm Under Adversarial Conditions[J]. Journal of System Simulation, 2025, 37(1): 1-12.

Fig.1
Diagram of the unmanned cluster network topology
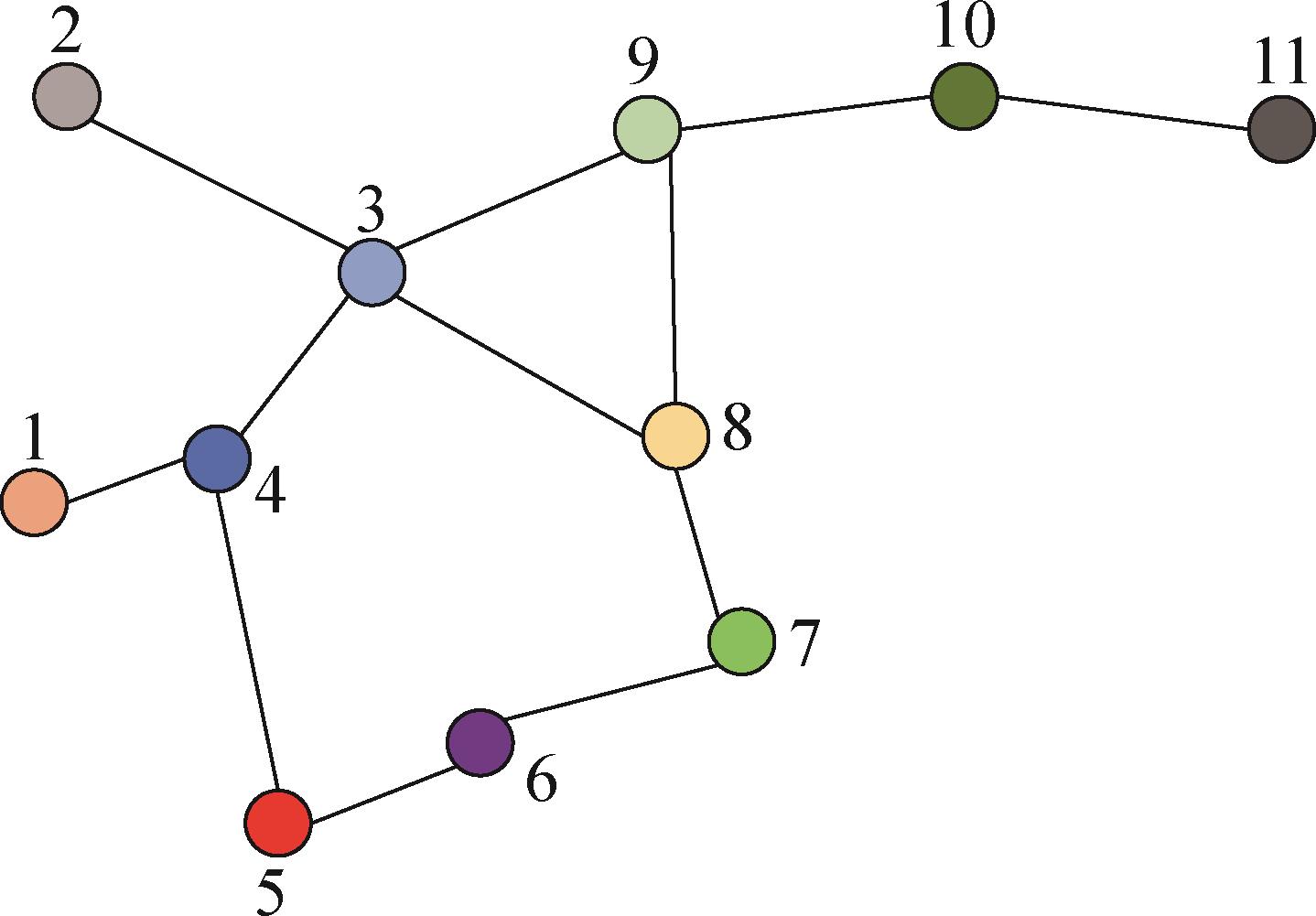
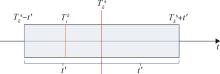
Fig. 2
Diagram of the reallocation timing constraints
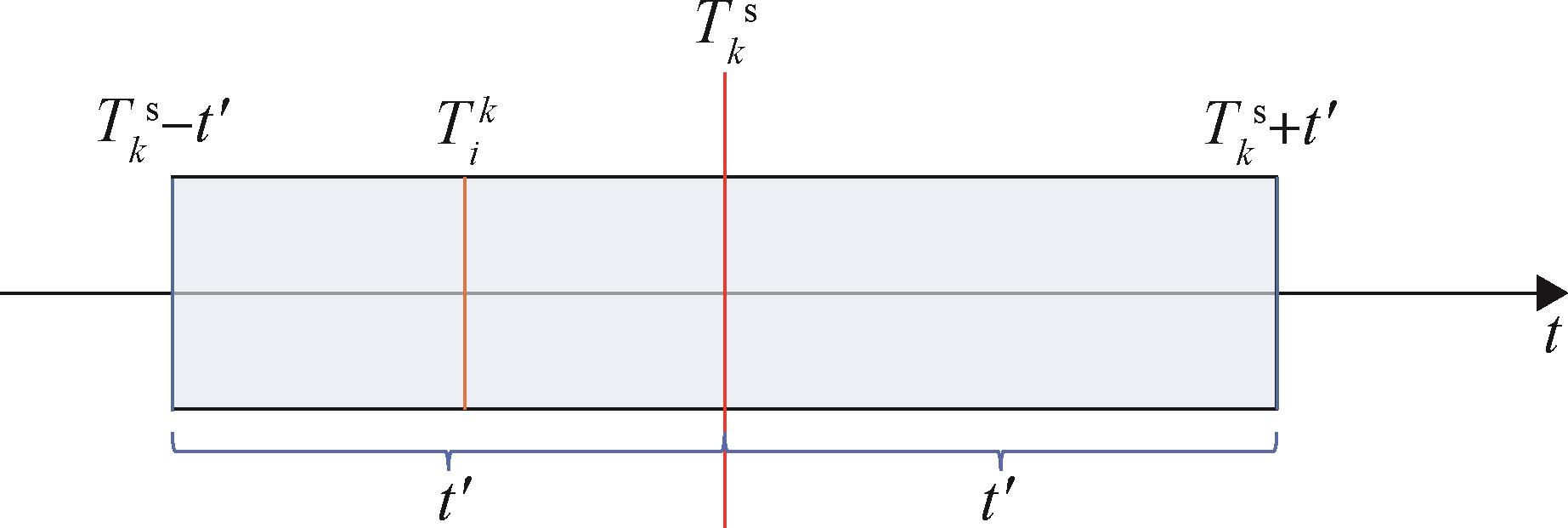
Fig. 3
Flowchart of CHP-HA algorithm
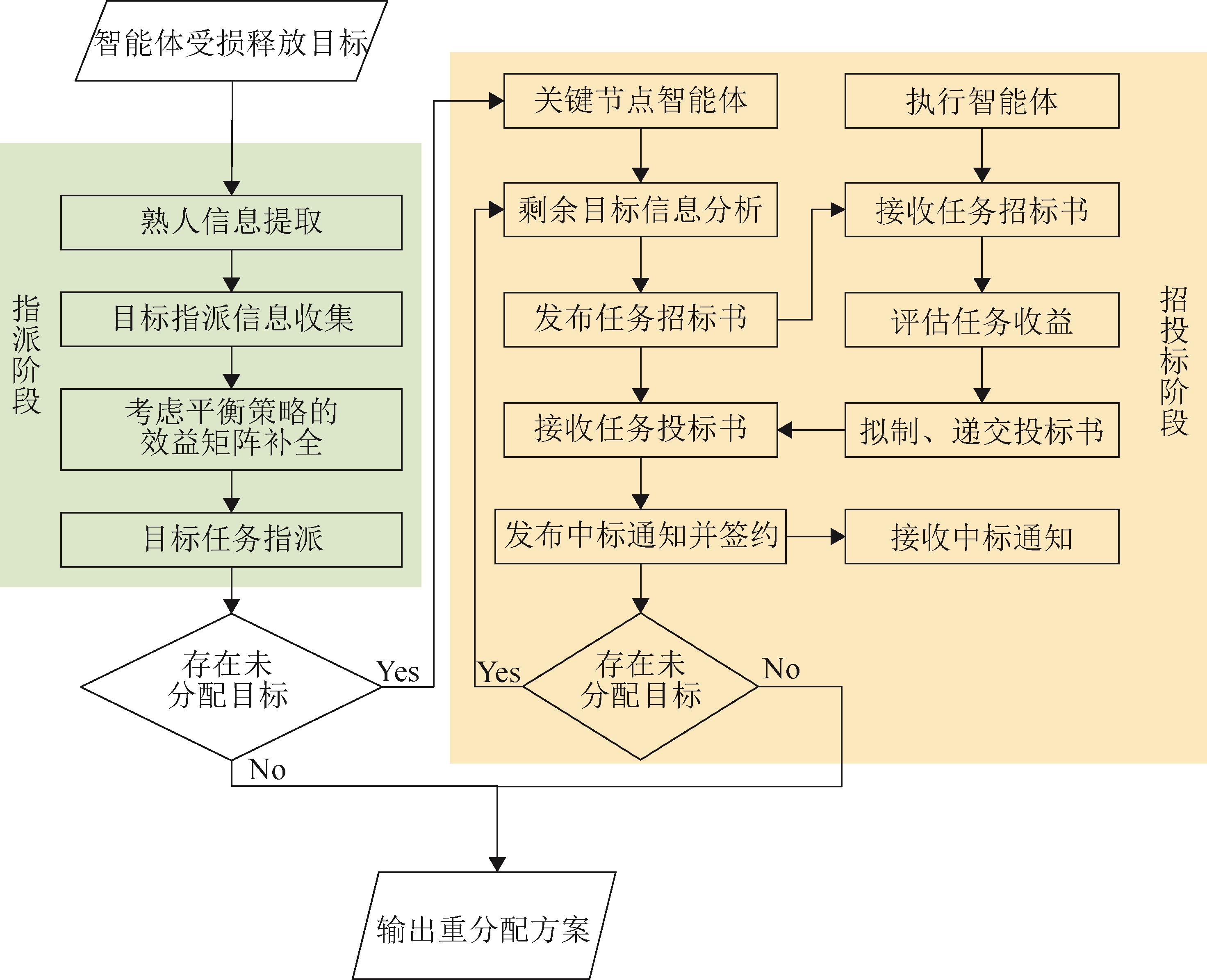

Fig. 4
Diagram of the balanced completion rule
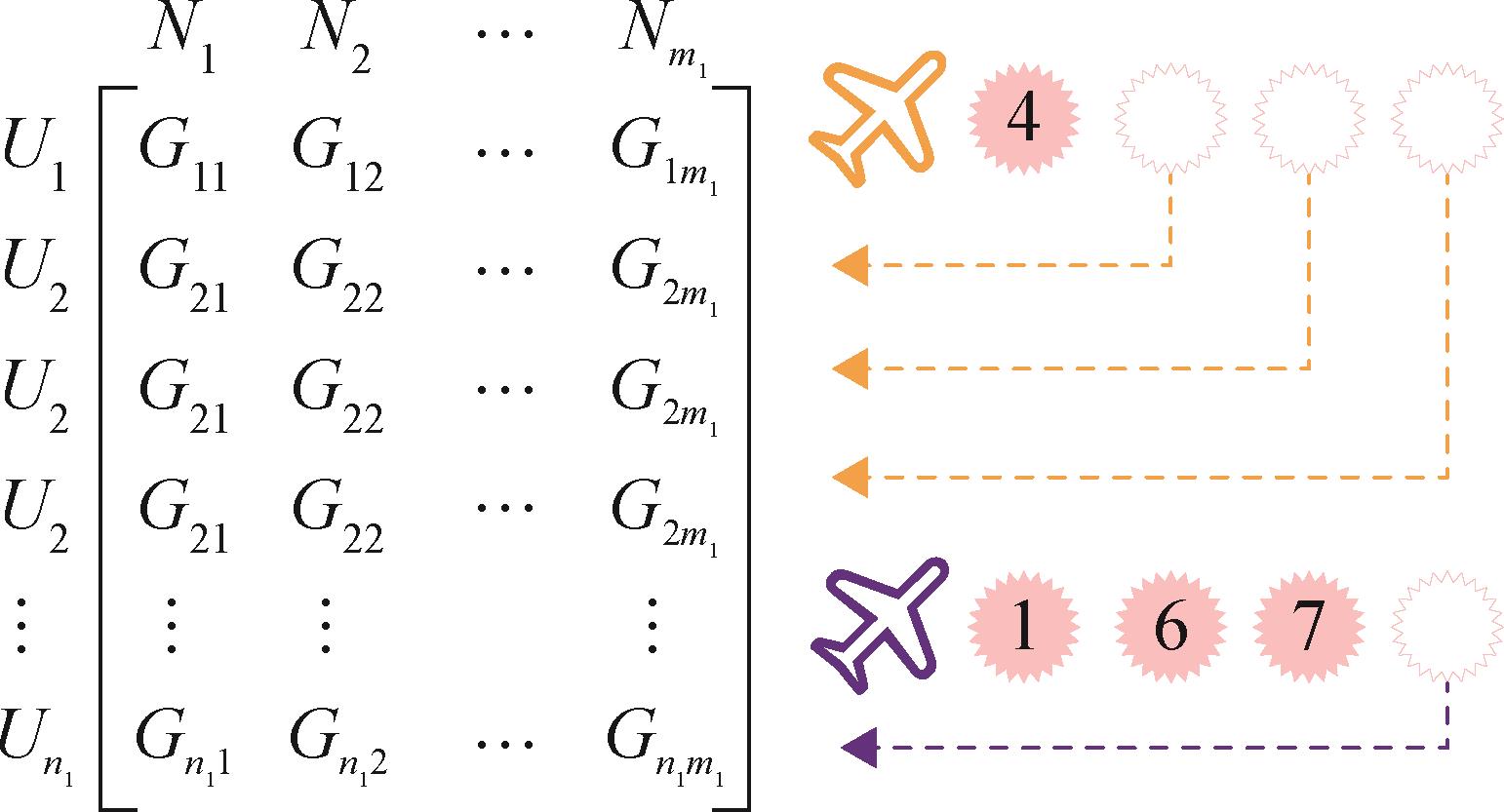
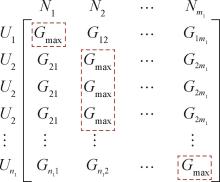
Fig. 5
Diagram of the benefit value completion rule
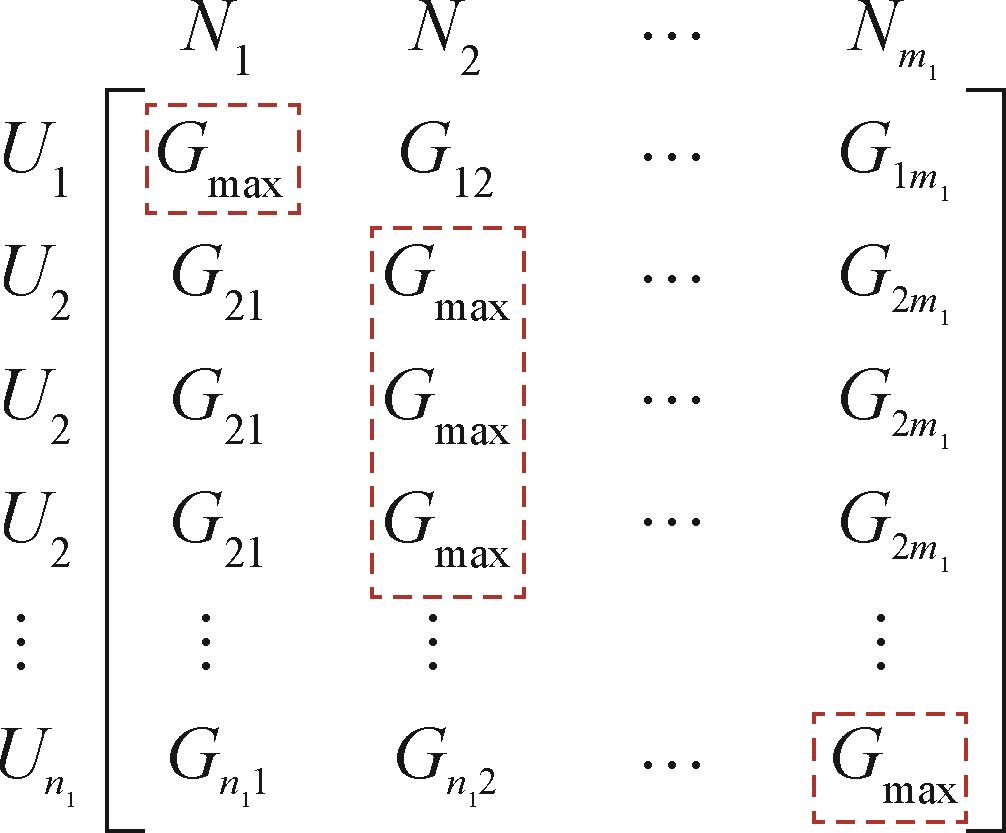

Fig. 6
Diagram of the agent completion rule

Fig. 7
Diagram of the task completion rule

Fig. 8
Concurrent transaction mechanism of CHP-HA

Table 1
Properties of agents
| 类别 | 速度/(m/s) | 位置 | 数量 | 最大任务数 |
|---|---|---|---|---|
| 侦察智能体 | [ | 随机 | 10 | 6 |
| 打击智能体 | [ | 随机 | 10 | 6 |

Fig. 9
Concurrent transaction mechanism of CHP-HA
Table 2
Groups of agents
| 关键节点 | 组内成员 |
|---|---|
| U0 | U9、U10、U8、U15、U14、U11、U17、U19 |
| U3 | U1、U2、U4、U5、U6、U7、U12、U18 |
Table 3
Initial task allocation of agents
| 智能体编号 | 任务类型 | 目标分配情况 |
|---|---|---|
| U0 | 侦察 | T16→T24→T18 |
| U1 | 侦察 | T21→T20→T27→T23 |
| U2 | 侦察 | T22→T26→T8→T1 |
| U3 | 侦察 | T12 |
| U4 | 侦察 | 0 |
| U5 | 侦察 | T3 |
| U6 | 侦察 | T11→T13→T17→T2 |
| U7 | 侦察 | T6 |
| U8 | 侦察 | T14→T9→T7 →T5→T28→T29 |
| U9 | 侦察 | T19→T25→T4→T0→T15→T10 |
| U10 | 打击 | T19→T3 |
| U11 | 打击 | T14→T9→T16→T24→T18→T28 |
| U12 | 打击 | T7→T12 |
| U13 | 打击 | T26→T1 |
| U14 | 打击 | T21→T20→T5→T27→T23→T29 |
| U15 | 打击 | T6→T2 |
| U16 | 打击 | T22→T25→T4→T0→T15→T8 |
| U17 | 打击 | 0 |
| U18 | 打击 | T11→T13→T17 |
| U19 | 打击 | T10 |
Table 4
Initial task allocation of agents
| 智能体编号 | 任务 类型 | 携带目标数量 | CNP算法完成度/% | CNP-HA算法完成度/% |
|---|---|---|---|---|
| U0 | 侦察 | 3 | 100 | 100 |
| U1 | 侦察 | 4 | 75 | 100 |
| U2 | 侦察 | 4 | 50 | 100 |
| U3 | 侦察 | 1 | 100 | 100 |
| U4 | 侦察 | 0 | ||
| U5 | 侦察 | 1 | 100 | 100 |
| U6 | 侦察 | 4 | 75 | 100 |
| U7 | 侦察 | 1 | 100 | 100 |
| U8 | 侦察 | 6 | 66 | 100 |
| U9 | 侦察 | 6 | 66 | 100 |
| U10 | 打击 | 2 | 100 | 100 |
| U11 | 打击 | 6 | 66 | 100 |
| U12 | 打击 | 2 | 100 | 100 |
| U13 | 打击 | 2 | 100 | 100 |
| U14 | 打击 | 6 | 83 | 100 |
| U15 | 打击 | 2 | 100 | 100 |
| U16 | 打击 | 6 | 83 | 100 |
| U17 | 打击 | 0 | ||
| U18 | 打击 | 3 | 100 | 100 |
| U19 | 打击 | 1 | 100 | 100 |
Fig. 10
Reallocation completeness when a single agent is damaged
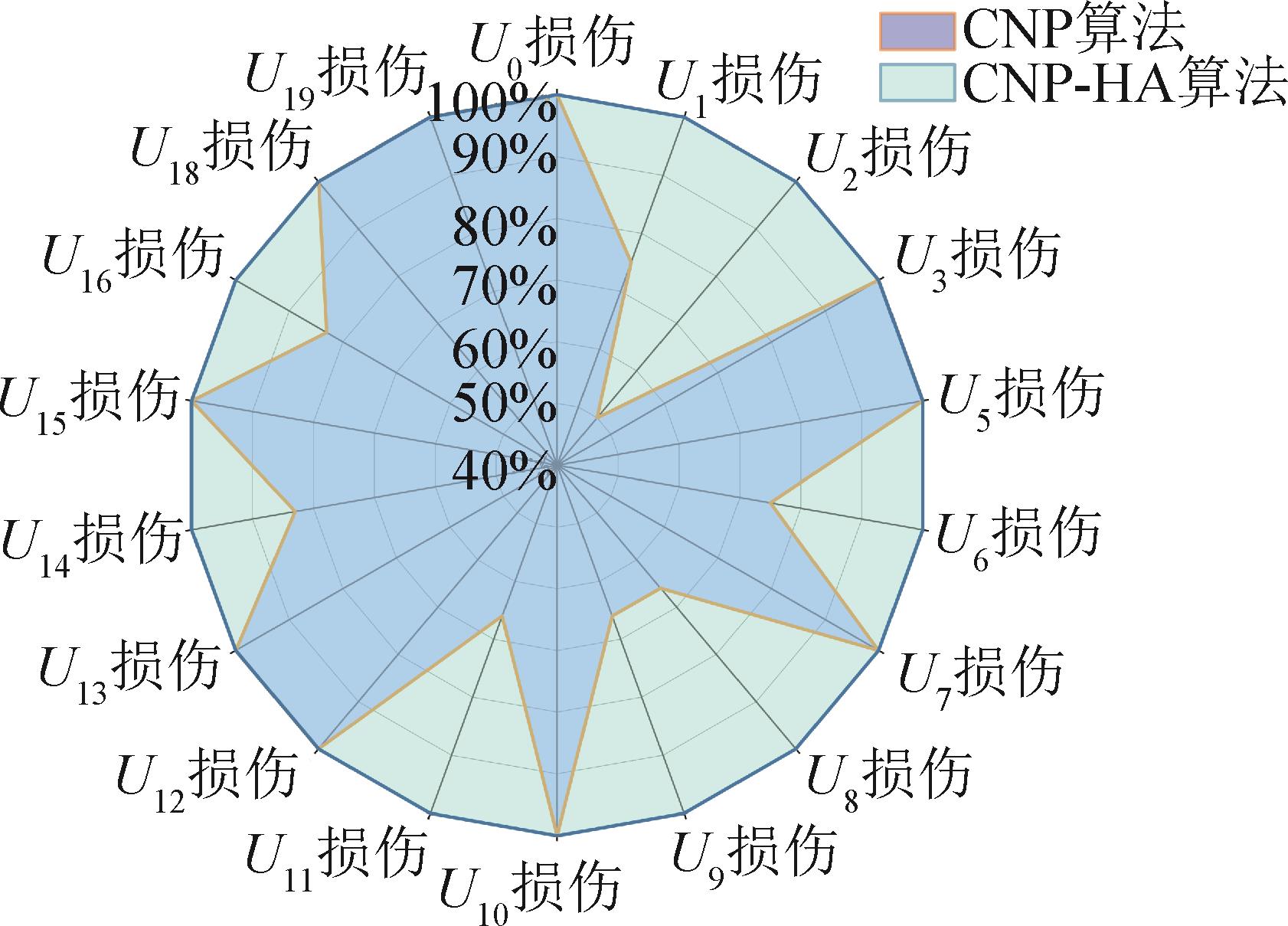

Fig. 11
Reallocation completeness when multiple agents are damaged
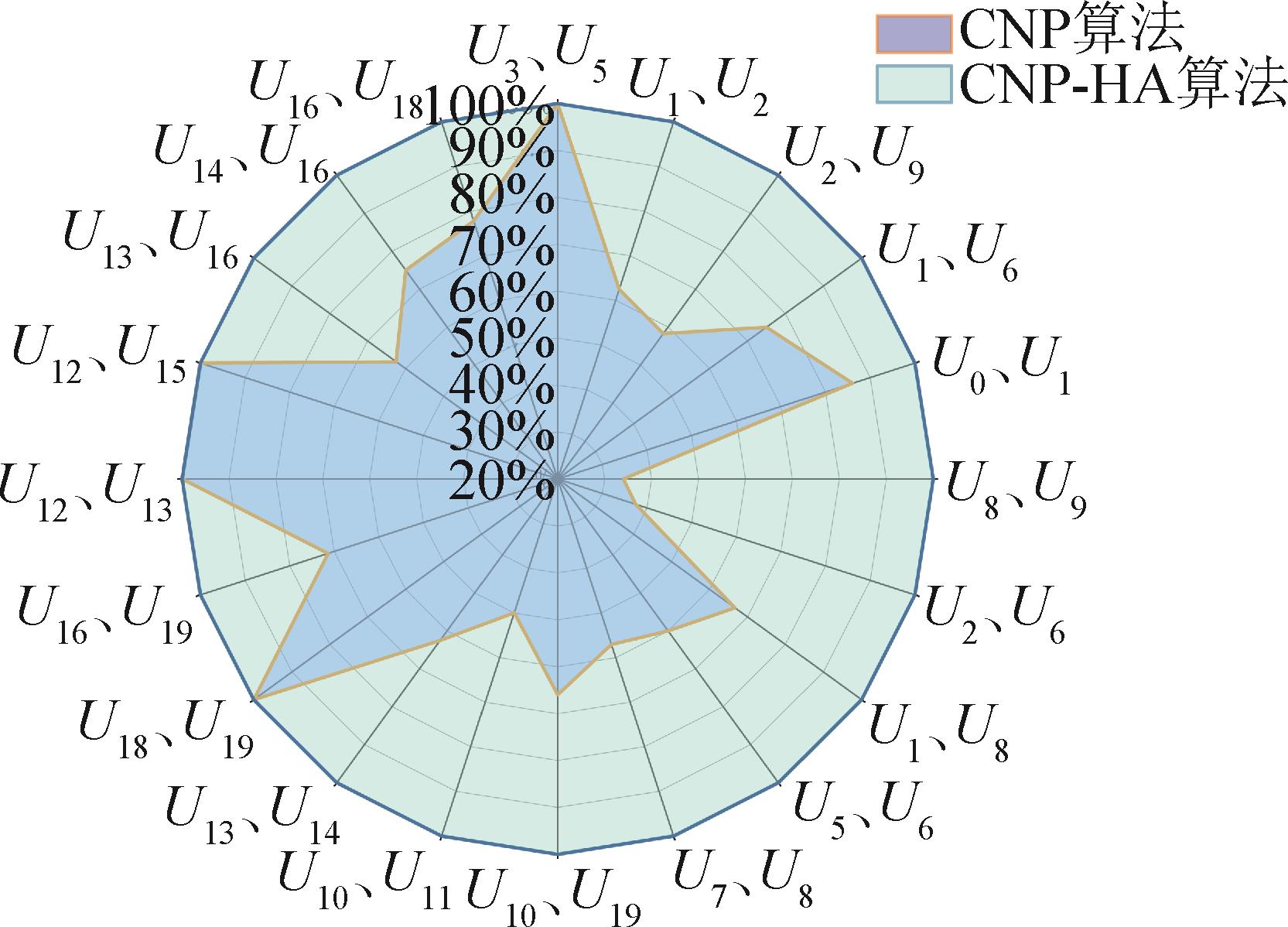
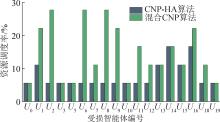
Fig. 12
Comparison of resource scheduling rate
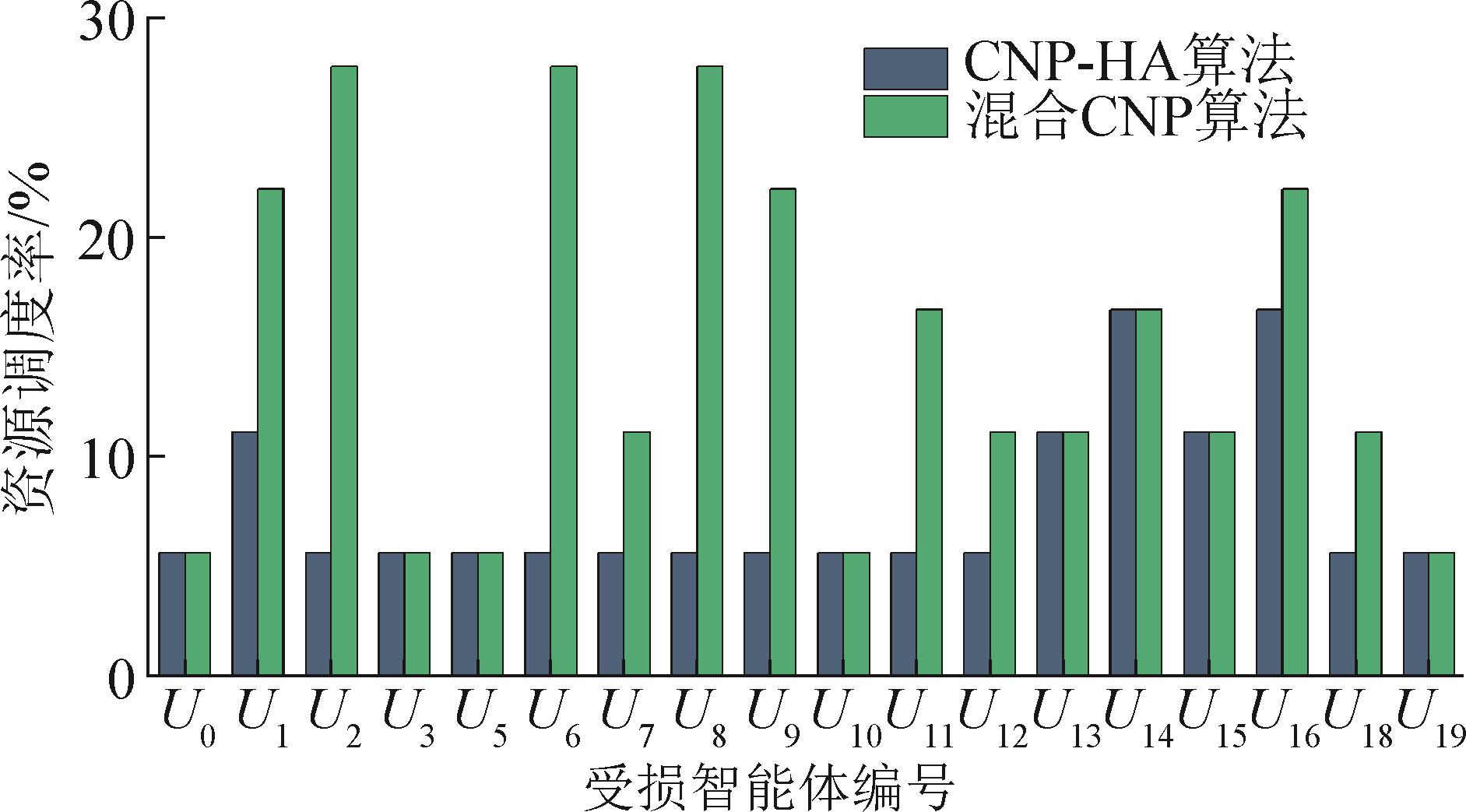
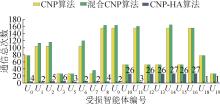
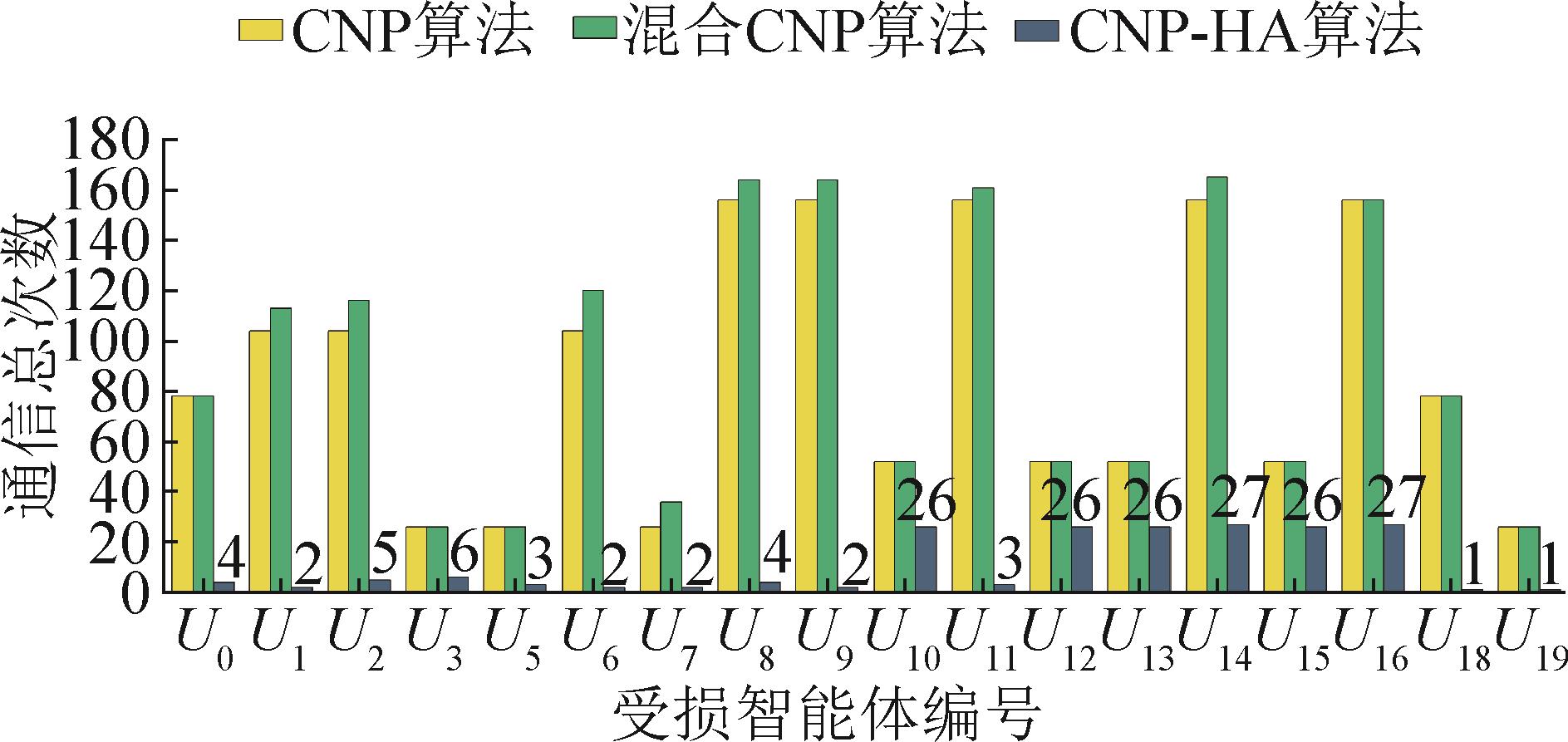
Fig. 13
Comparison of algorithm rapidity when single agent impaired
| 1 | 吴立珍, 李宏男, 牛轶峰. 无人机小样本条件下遮挡和混淆目标识别方法[J]. 国防科技大学学报, 2022, 44(4): 13-21. |
| Wu Lizhen, Li Hongnan, Niu Yifeng. Occlusion and Confusion Targets Recognition Method for UAV Under Small Sample Conditions[J]. Journal of National University of Defense Technology, 2022, 44(4): 13-21. | |
| 2 | 姜杰, 闫文君, 刘凯, 等. 基于多源图像融合的无人机航拍舰船目标识别方法[J/OL]. 北京航空航天大学学报. (2024-08-15) [2024-09-06]. . |
| Jiang Jie, Yan Wenjun, Liu Kai, et al. A Ship Target Recognition Method Based on Multi-source Image Fusion for Unmanned Aerial Vehicle Aerial Photography[J/OL]. Journal of Beijing University of Aeronautics and Astronautics. (2024-08-15) [2024-09-06]. . | |
| 3 | 陈军, 梁晶, 程龙, 等. 基于FCM的多无人机协同攻击决策建模方法[J]. 航空学报, 2022, 43(7): 370-387. |
| Chen Jun, Liang Jing, Cheng Long, et al. Cooperative Attack Decision Modeling Method of Multiple UAVs Based on FCM[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(7): 370-387. | |
| 4 | 李军, 陈士超. 无人机蜂群关键技术发展综述[J]. 兵工学报, 2023, 44(9): 2533-2545. |
| Li Jun, Chen Shichao. Overview of Key Technology and Its Development of Drone Swarm[J]. Acta Armamentarii, 2023, 44(9): 2533-2545. | |
| 5 | 高卫峰, 王琼, 李宏, 等. 无人机集群任务分配的多目标算法研究[J]. 西安电子科技大学学报, 2024, 51(2): 1-12. |
| Gao Weifeng, Wang Qiong, Li Hong, et al. Research on the Multi-objective Algorithm of UAV Cluster Task Allocation[J]. Journal of Xidian University, 2024, 51(2): 1-12. | |
| 6 | 朱建文, 赵长见, 李小平, 等. 基于强化学习的集群多目标分配与智能决策方法[J]. 兵工学报, 2021, 42(9): 2040-2048. |
| Zhu Jianwen, Zhao Changjian, Li Xiaoping, et al. Multi-target Assignment and Intelligent Decision Based on Reinforcement Learning[J]. Acta Armamentarii, 2021, 42(9): 2040-2048. | |
| 7 | 甄子洋, 江驹, 孙绍山, 等. 无人机集群作战协同控制与决策[M]. 北京: 国防工业出版社, 2022. |
| Zhen Ziyang, Jiang Ju, Sun Shaoshan, et al. Cooperative Control and Decision of UAV Swarm Operations[M]. Beijing: National Defense Industry Press, 2022. | |
| 8 | Liu Cuntao, Guo Yan, Li Ning, et al. Multiuser Oriented Multi-UAV Mission Assignment with Cooperative Information Sharing[J]. IEEE Wireless Communications Letters, 2021, 10(4): 907-911. |
| 9 | Wu Husheng, Li Hao, Xiao Renbin, et al. Modeling and Simulation of Dynamic Ant Colony's Labor Division for Task Allocation of UAV Swarm[J]. Physica A: Statistical Mechanics and its Applications, 2018, 491: 127-141. |
| 10 | Wang Ziheng, Zhang Jianlei. A Task Allocation Algorithm for a Swarm of Unmanned Aerial Vehicles Based on Bionic Wolf Pack Method[J]. Knowledge-Based Systems, 2022, 250: 109072. |
| 11 | 刘西, 李贤, 陈伟, 等. 基于NSGA-Ⅲ算法的多目标分配方法研究[J]. 空天防御, 2021, 4(1): 109-114. |
| Liu Xi, Li Xian, Chen Wei, et al. Research on Multi-objective Assignment Method Based on NSGA-Ⅲ Algorithm[J]. Air & Space Defense, 2021, 4(1): 109-114. | |
| 12 | Hou Yukai, Zhao Jin, Zhang Rongqing, et al. UAV Swarm Cooperative Target Search: A Multi-agent Reinforcement Learning Approach[J]. IEEE Transactions on Intelligent Vehicles, 2024, 9(1): 568-578. |
| 13 | Wu Qichao, Xia Xuewen, Song Haojie, et al. A Neighborhood Comprehensive Learning Particle Swarm Optimization for the Vehicle Routing Problem with Time Windows[J]. Swarm and Evolutionary Computation, 2024, 84: 101425. |
| 14 | 张安, 毕文豪, 邱鹏, 等. 基于改进合同网的多UAV打击地面TST任务重分配[J]. 战术导弹技术, 2019(2): 39-46. |
| Zhang An, Bi Wenhao, Qiu Peng, et al. Mission Re-assignment for Attacking Ground TSTs with Multi-UAVs Based on Improved CNP[J]. Tactical Missile Technology, 2019(2): 39-46. | |
| 15 | 谷旭平, 唐大全. 基于细菌觅食算法的多异构无人机任务规划[J]. 系统工程与电子技术, 2021, 43(11): 3312-3320. |
| Gu Xuping, Tang Daquan. Multi-heterogeneous UAV Task Planning Based on Bacterial Foraging Algorithm[J]. Systems Engineering and Electronics, 2021, 43(11): 3312-3320. | |
| 16 | Zhang Zhenshi, Liu Huan, Wu Guohua. A Dynamic Task Scheduling Method for Multiple UAVs Based on Contract Net Protocol[J]. Sensors, 2022, 22(12): 4486. |
| 17 | 魏兆恬, 赵晓林, 李俊涛, 等. 考虑时间窗约束的多无人机任务分配[J]. 电光与控制, 2022, 29(8): 17-22. |
| Wei Zhaotian, Zhao Xiaolin, Li Juntao, et al. Multi-UAV Task Allocation Under Time Window Constraints[J]. Electronics Optics & Control, 2022, 29(8): 17-22. | |
| 18 | Kensler J A, Agah A. Neural Networks-based Adaptive Bidding with the Contract Net Protocol in Multi-robot Systems[J]. Applied Intelligence, 2009, 31(3): 347-362. |
| [1] | Jiang Haosheng, Wu Fangfang, Huang Zexian, Ma Ziyue, Dong Chunyun, Ping Xubin. Trajectory Planning and Tracking for Multi-quadcopter in Dynamic Obstacle Environments [J]. Journal of System Simulation, 2025, 37(8): 2089-2102. |
| [2] | Yao Changhua, Bi Shanning, Ma Rufei, Yu Xiaohan, Li Jiaqiang, Chen Jinli. Method for Dynamic Coalition Formation of Wargame Agent for Force Cooperation [J]. Journal of System Simulation, 2025, 37(5): 1188-1196. |
| [3] | Xiao Peng, Xie Feng, Ni Haihong, Zhang Min, Tang Zhili, Li Ni. Research on Collaborative Optimization Method of Multi-UAV Task Allocation and Path Planning [J]. Journal of System Simulation, 2024, 36(5): 1141-1151. |
| [4] | Yang Huijie, Xiao Taoshun, Wu Chen, Guo Lingfeng. Research on Integration of Virtual-real Hybrid Simulation Experiment Environment for Unmanned Swarm [J]. Journal of System Simulation, 2024, 36(4): 825-833. |
| [5] | Wang Ning, Liang Xiaolong, Zhang Jiaqiang, Hou Yueqi, Yang Aiwu. Research on Cross-domain Unmanned Swarm Cooperative Anti-submarine Search Method [J]. Journal of System Simulation, 2024, 36(4): 817-824. |
| [6] | Liang Xiaolong, Yang Aiwu, Zhang Jiaqiang, Hou Yueqi, Wang Ning, Huang Xiao, Gong Junbin. Simulation Verification and Decision-making Key Technologies of Unmanned Swarm Game Confrontation: A Survey [J]. Journal of System Simulation, 2024, 36(4): 805-816. |
| [7] | Wang Jipeng, Zhang Xing, Wu Hao, Gu Yu, Yang Huijie. Research on Theoretical Framework of Simulative Experiment Evalution for Intelligent Unmanned Swarm Cooperation [J]. Journal of System Simulation, 2024, 36(4): 795-804. |
| [8] | Shuangcheng Niu, Yuqiang Jin, Kunhu Kou. Research on Collaborative Task Allocation Method of Multiple UAVs Based on Blockchain [J]. Journal of System Simulation, 2023, 35(5): 949-956. |
| [9] | Zhiqiang Li, Yuanlong Li, Laixiang Yin, Xiangping Ma. Research on Unmanned Swarm Combat System Adaptive Evolution Model Simulation [J]. Journal of System Simulation, 2023, 35(4): 878-886. |
| [10] | Kaituan Feng, Jie Yuan. Research on Discrete Workshop Task Assignment Based on Improved Water Filling Algorithm [J]. Journal of System Simulation, 2022, 34(4): 768-776. |
| [11] | Xin Zhou, Weiping Wang, Yifan Zhu, Tao Wang, Tian Jing. An Unmanned Swarm Search Method Based on Human-Robot Cooperation [J]. Journal of System Simulation, 2022, 34(4): 735-744. |
| [12] | Wei Ruixuan, Wu Zichen. Study on Task Allocation of UAV Swarm Based on Cognitive Control [J]. Journal of System Simulation, 2021, 33(7): 1574-1581. |
| [13] | Tan Yaxin, Luo Jianhua, Fan Rui, Dong Zhiming. A Parallel Simulation Method for Combat organization and Implementation [J]. Journal of System Simulation, 2019, 31(11): 2350-2355. |
| [14] | Wang Rugen, Li Weimin, Liu Yonglan, Liu Jinsong. Research on Task Allocation Method of Unmanned Aerial Vehicle Cluster Network [J]. Journal of System Simulation, 2018, 30(12): 4794-4802. |
| [15] | Liang Hongtao, Kang Fengju. Task Allocation Modeling for Agent-oriented UUV Collaborative System [J]. Journal of System Simulation, 2015, 27(9): 2075-2082. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
