

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (9): 2352-2365.doi: 10.16182/j.issn1004731x.joss.24-0413
• Papers • Previous Articles Next Articles
Xie Chunlei1,2, Hu Hongxia1, Han Weibo1
Received:2024-04-21
Revised:2024-08-20
Online:2025-09-18
Published:2025-09-22
Contact:
Hu Hongxia
CLC Number:
Xie Chunlei, Hu Hongxia, Han Weibo. Wingtip Docking Control of Composite Aircraft Based on ADRC Theory[J]. Journal of System Simulation, 2025, 37(9): 2352-2365.

Fig. 1
Schematic diagram of connecting mechanism of assembly aircraft
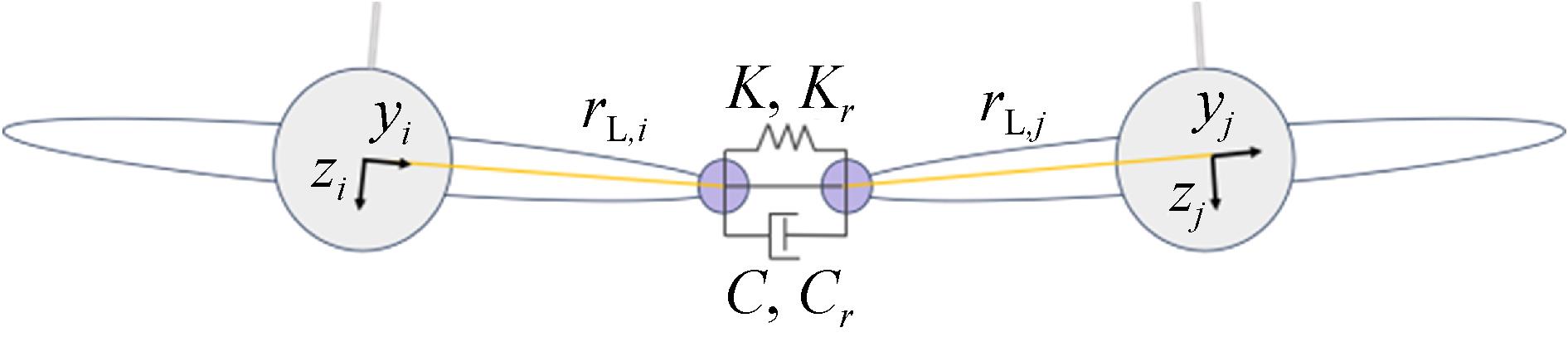
Fig. 2
Vertical velocity of wing-tip vortices at different positions
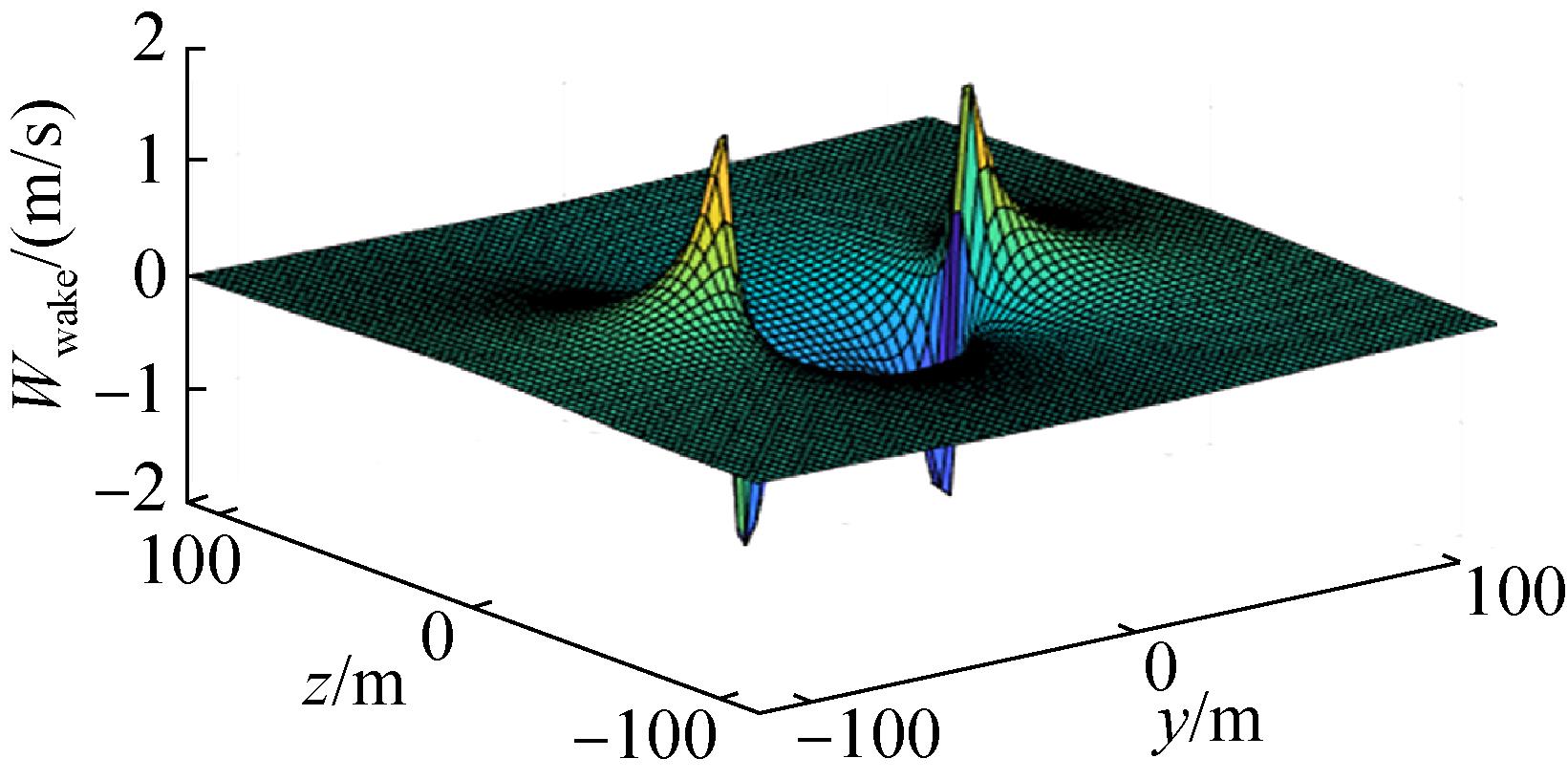
Fig. 3
Slide velocity of wing-tip vortices at different positions
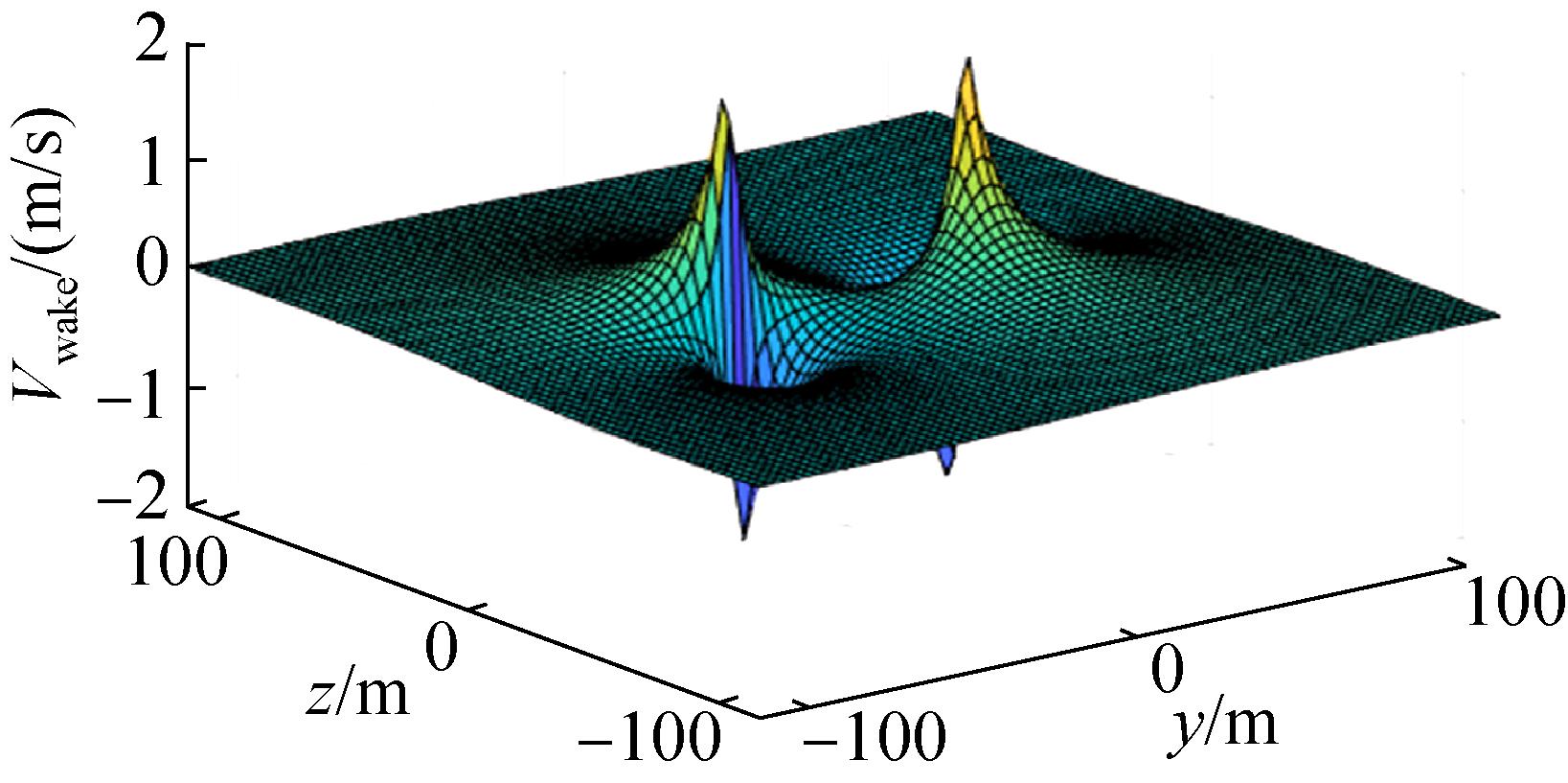
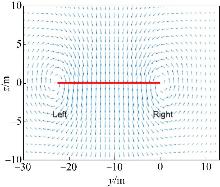
Fig. 4
Schematic diagram of wing tip vortex of single aircraft when x=0 (set right wing tip as origin)
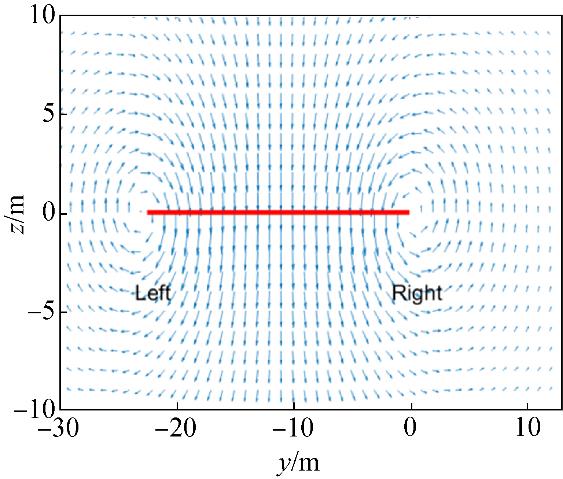
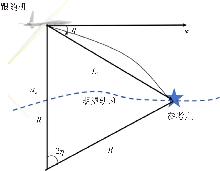
Fig. 5
Schematic diagram of nonlinear L1 guidance
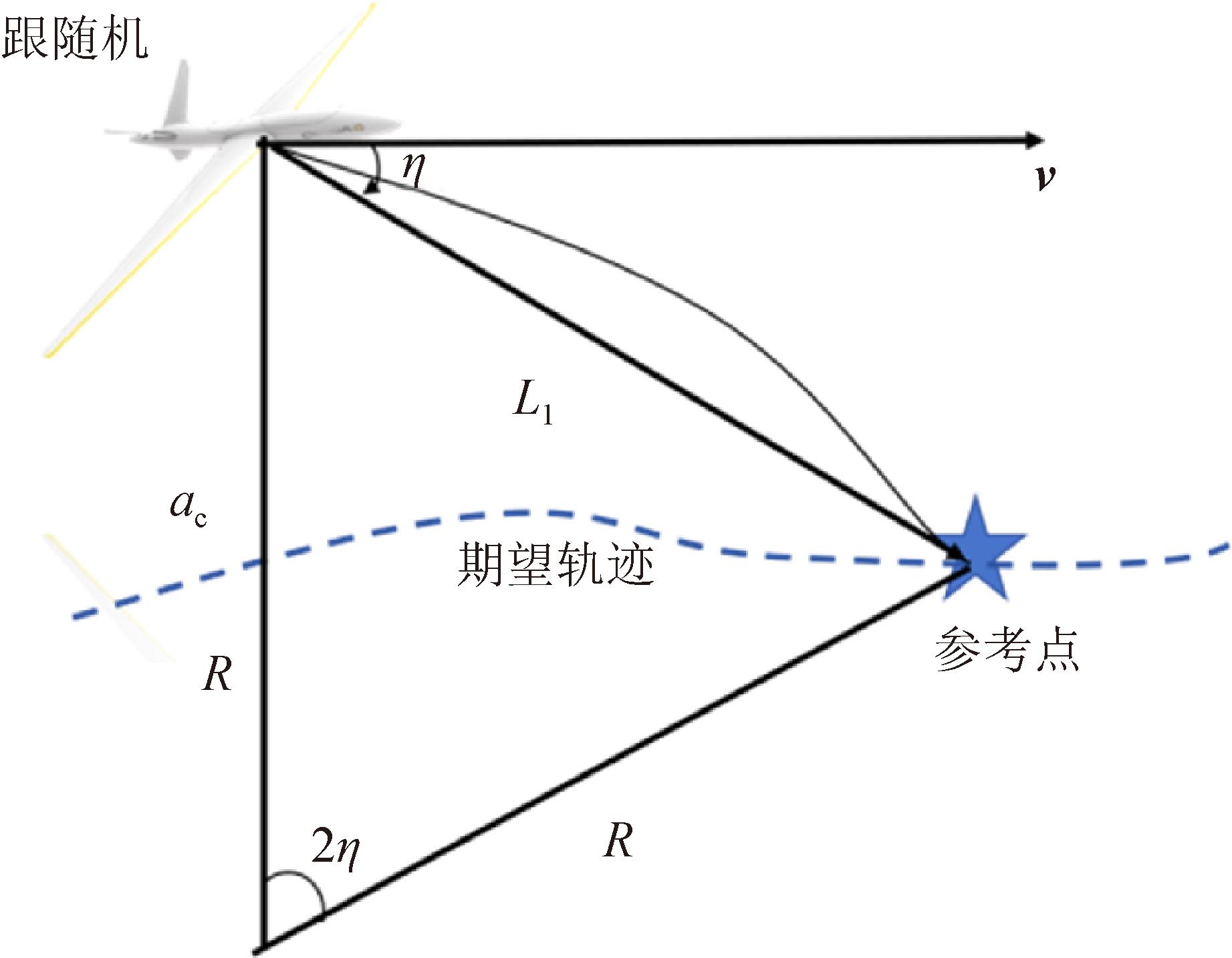
Fig. 6
Diagram of longitudinal L1 guidance
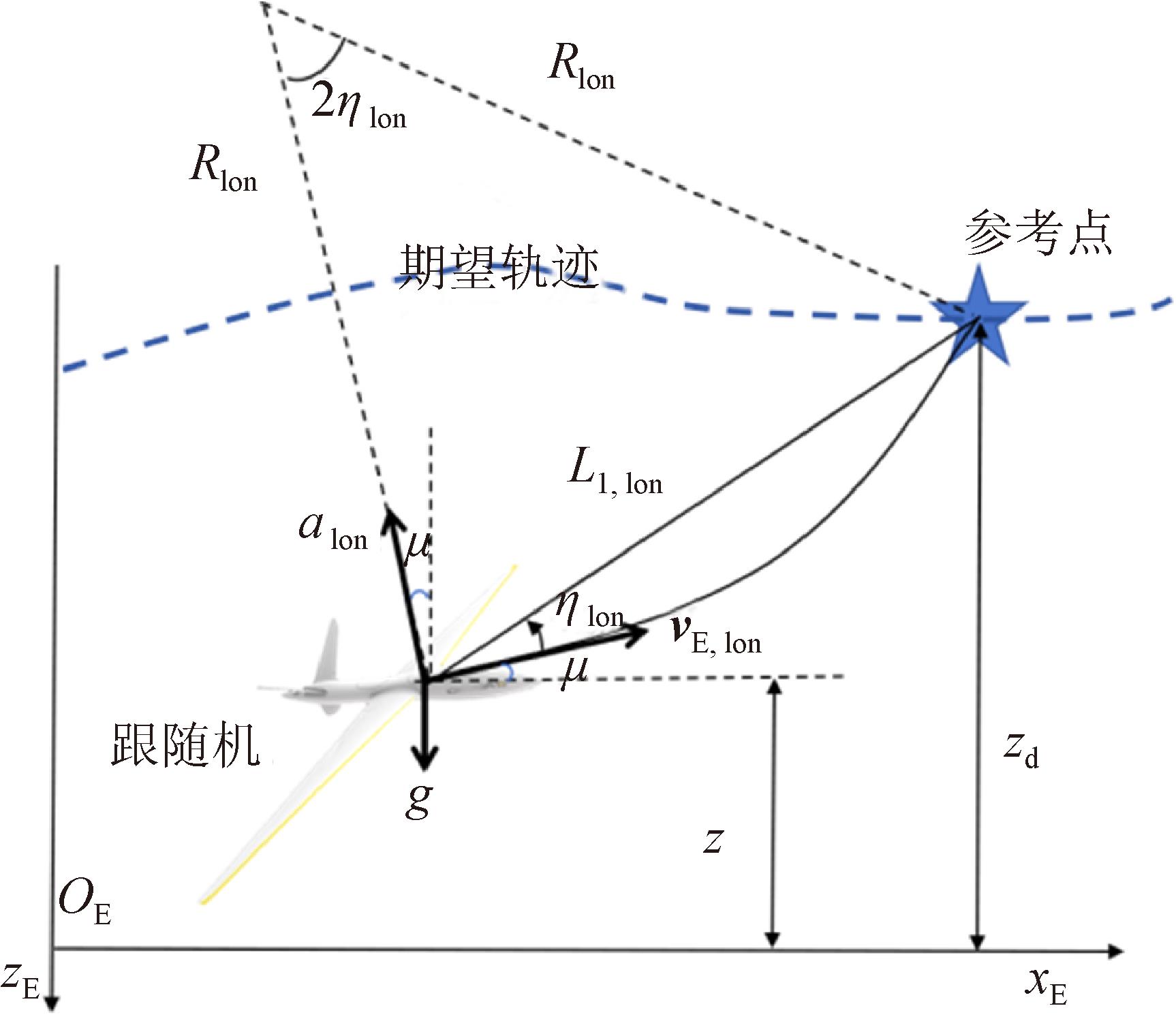
Fig. 7
Diagram of lateral L1 guidance
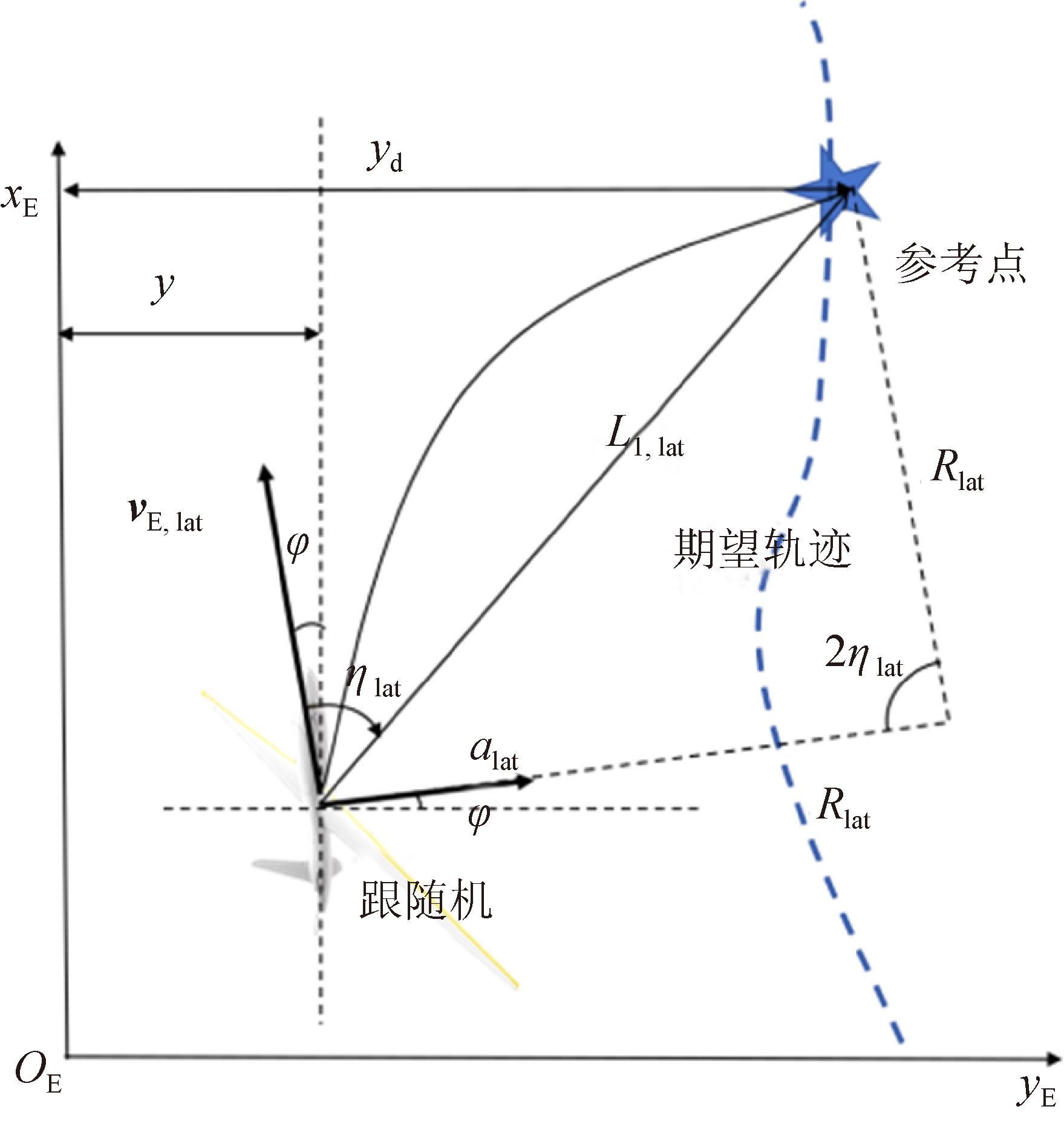
Fig. 8
Wingtip flight docking control method
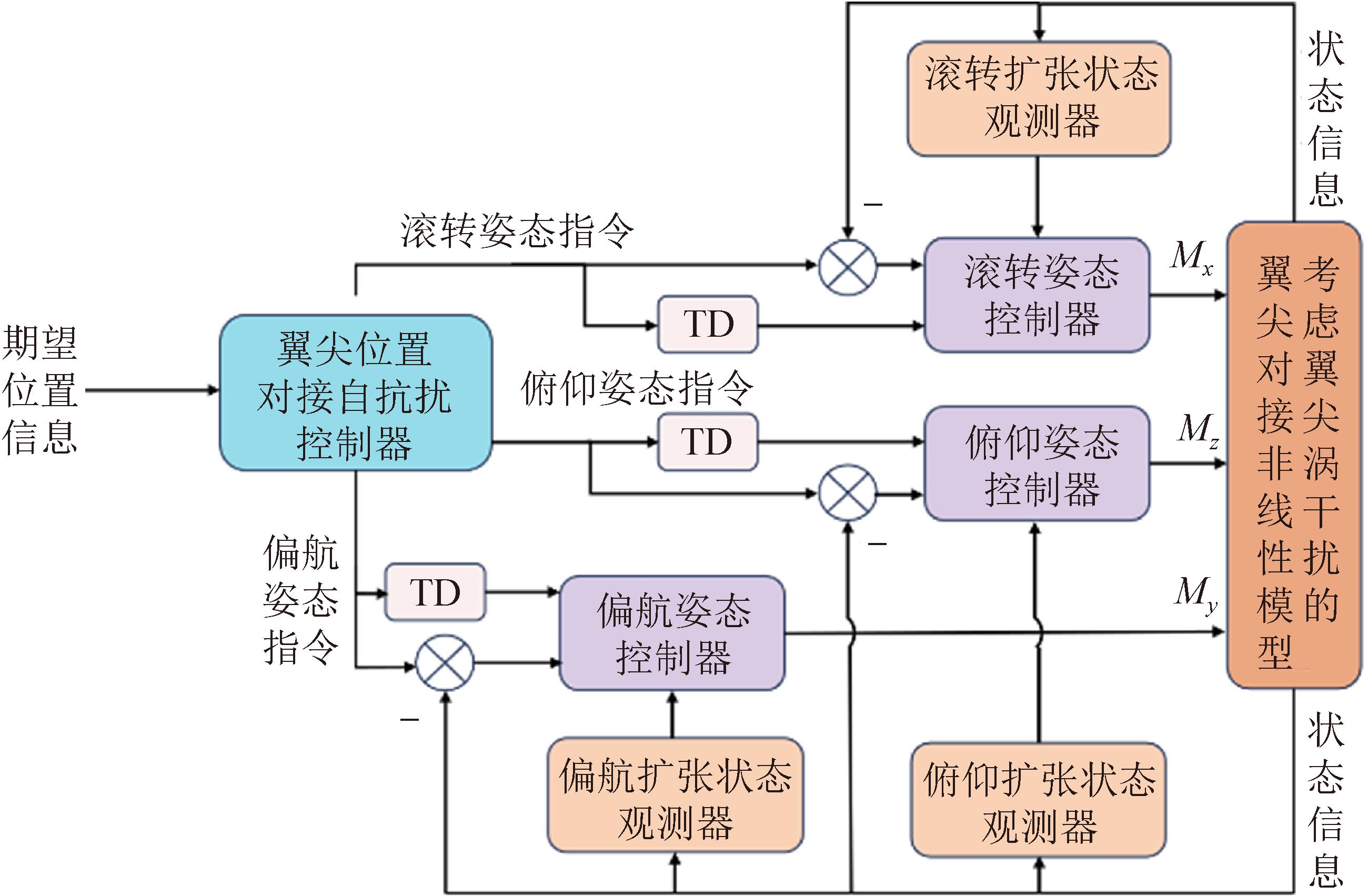
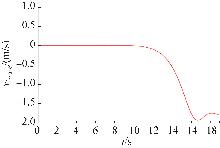
Fig. 9
Actual vertical velocity of the wing-tip vortex at different positions
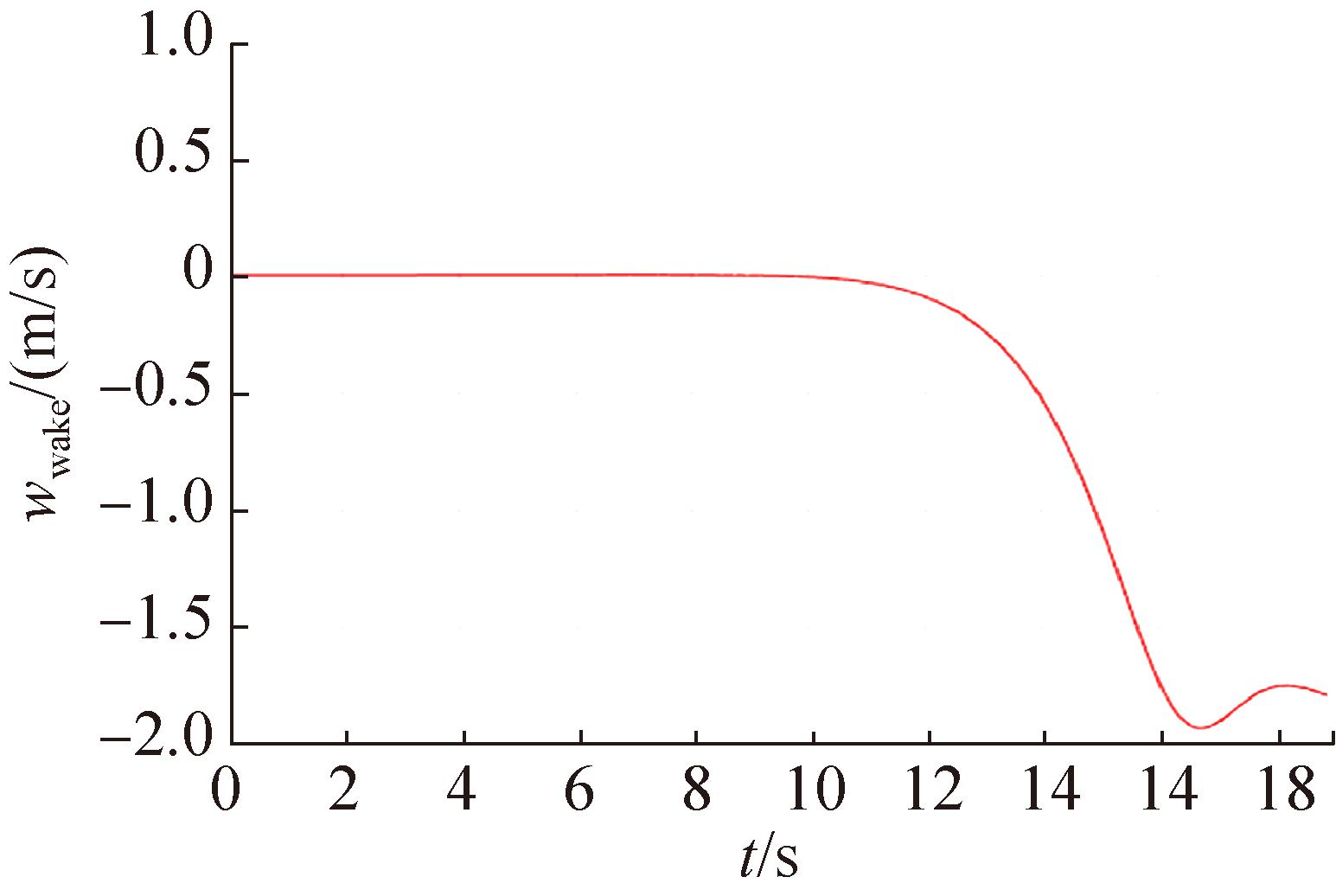
Fig. 10
Actual slide velocity of the wing-tip vortex at different positions
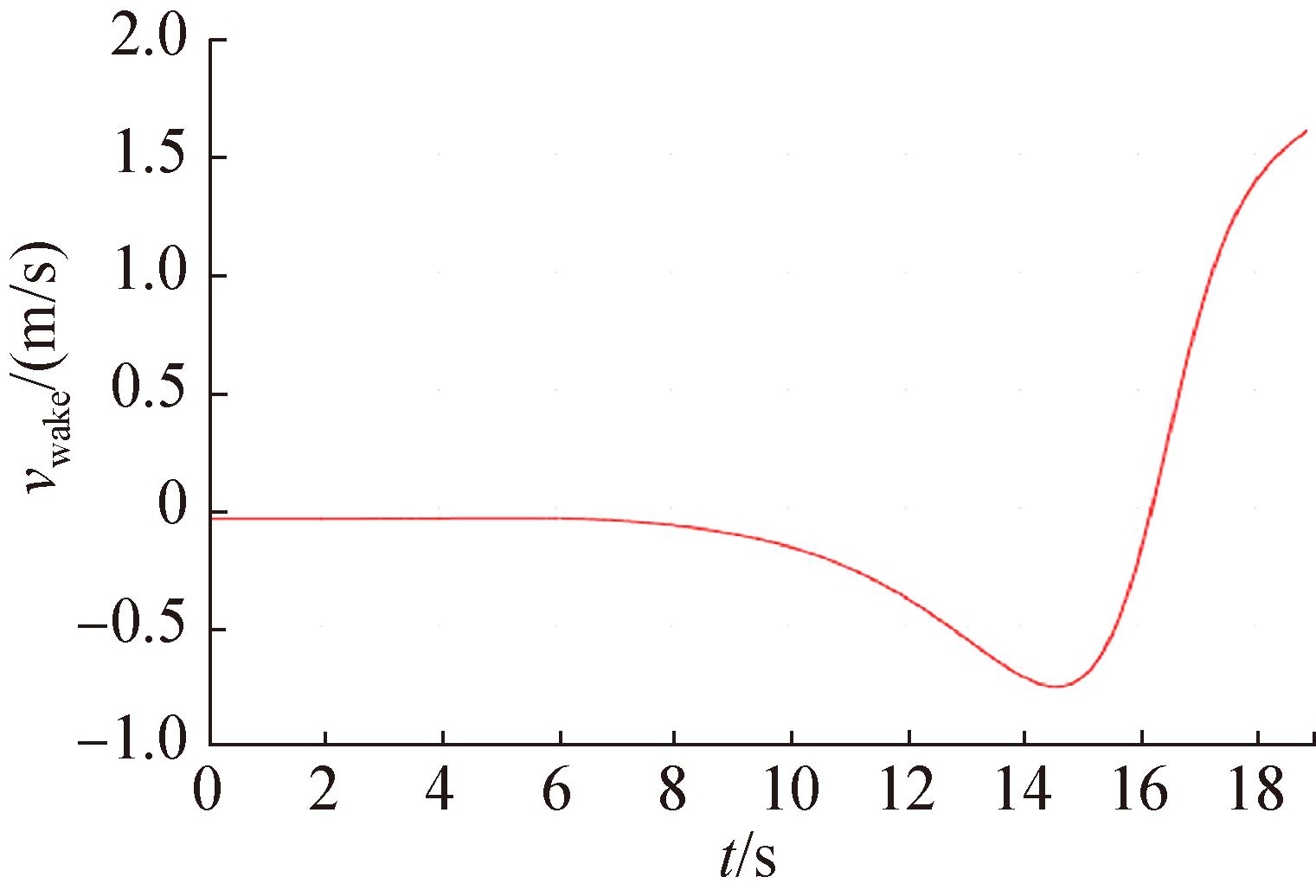
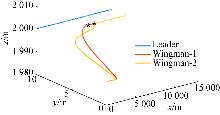
Fig. 11
Three dimensional relative position change curve of two aircraft during wingtip docking process
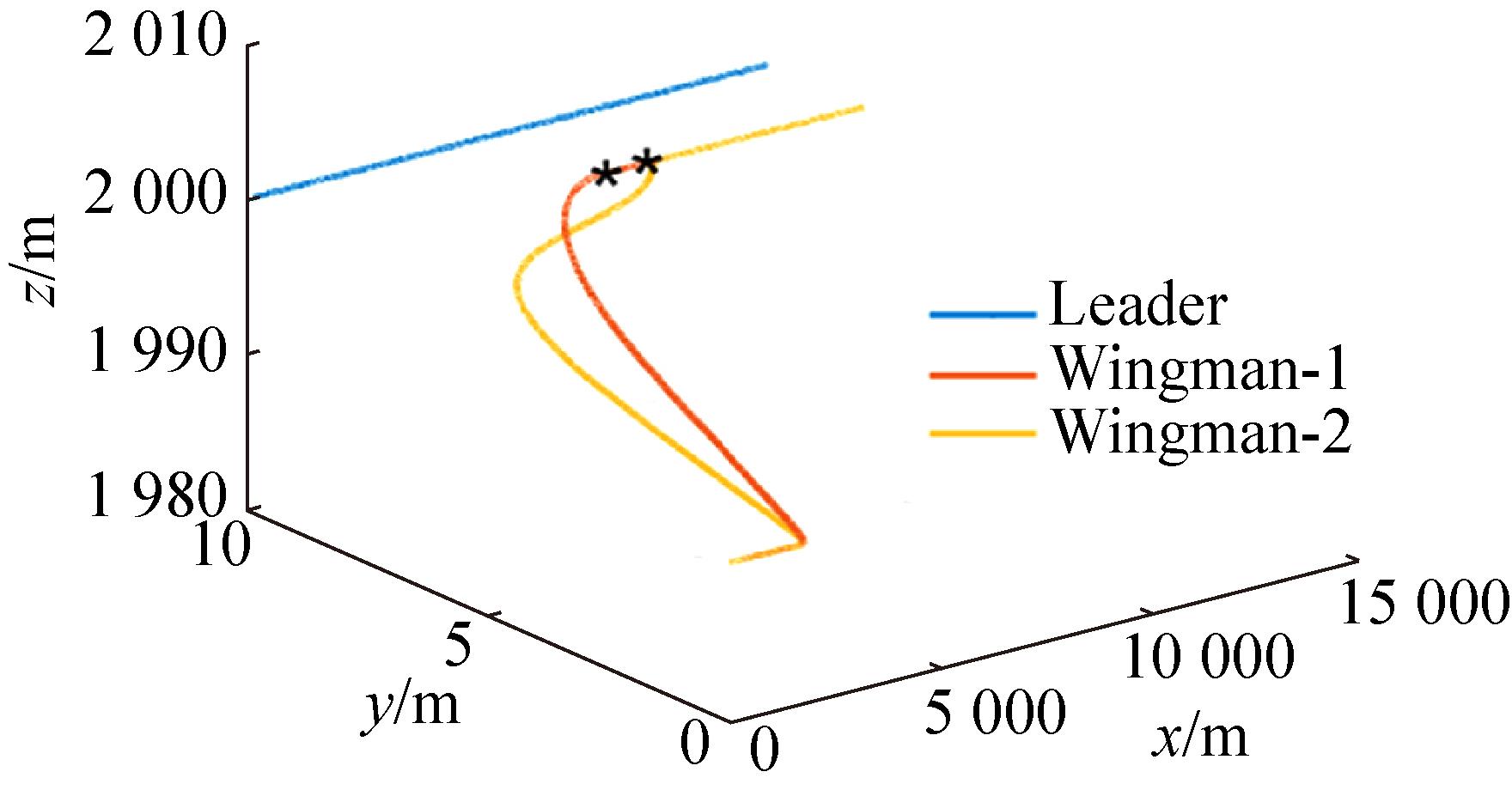
Fig. 12
Curve of relative distance between two aircrafts during wingtip docking process
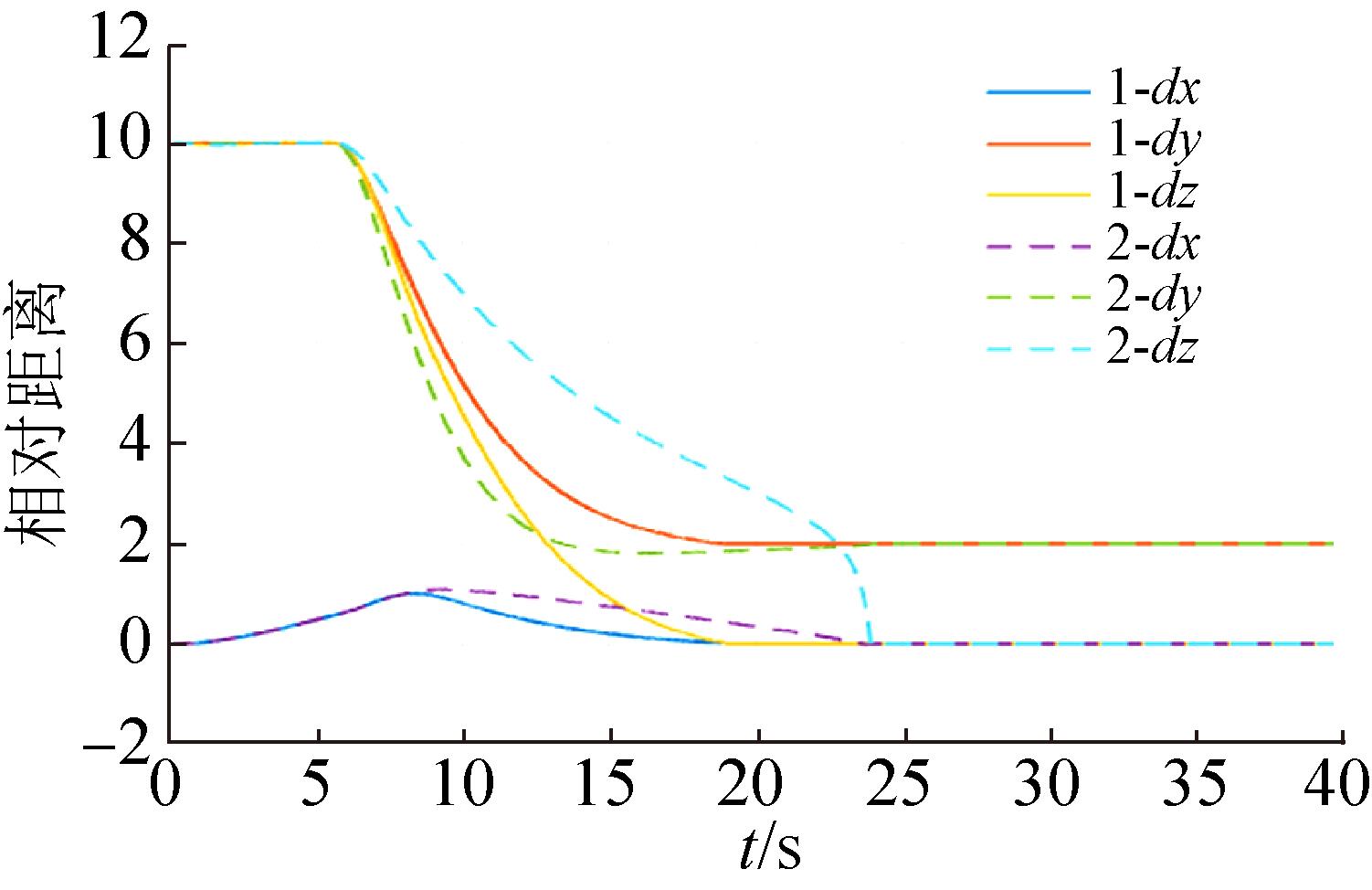
Fig. 13
Pitch angle variation curve during wingtip docking process
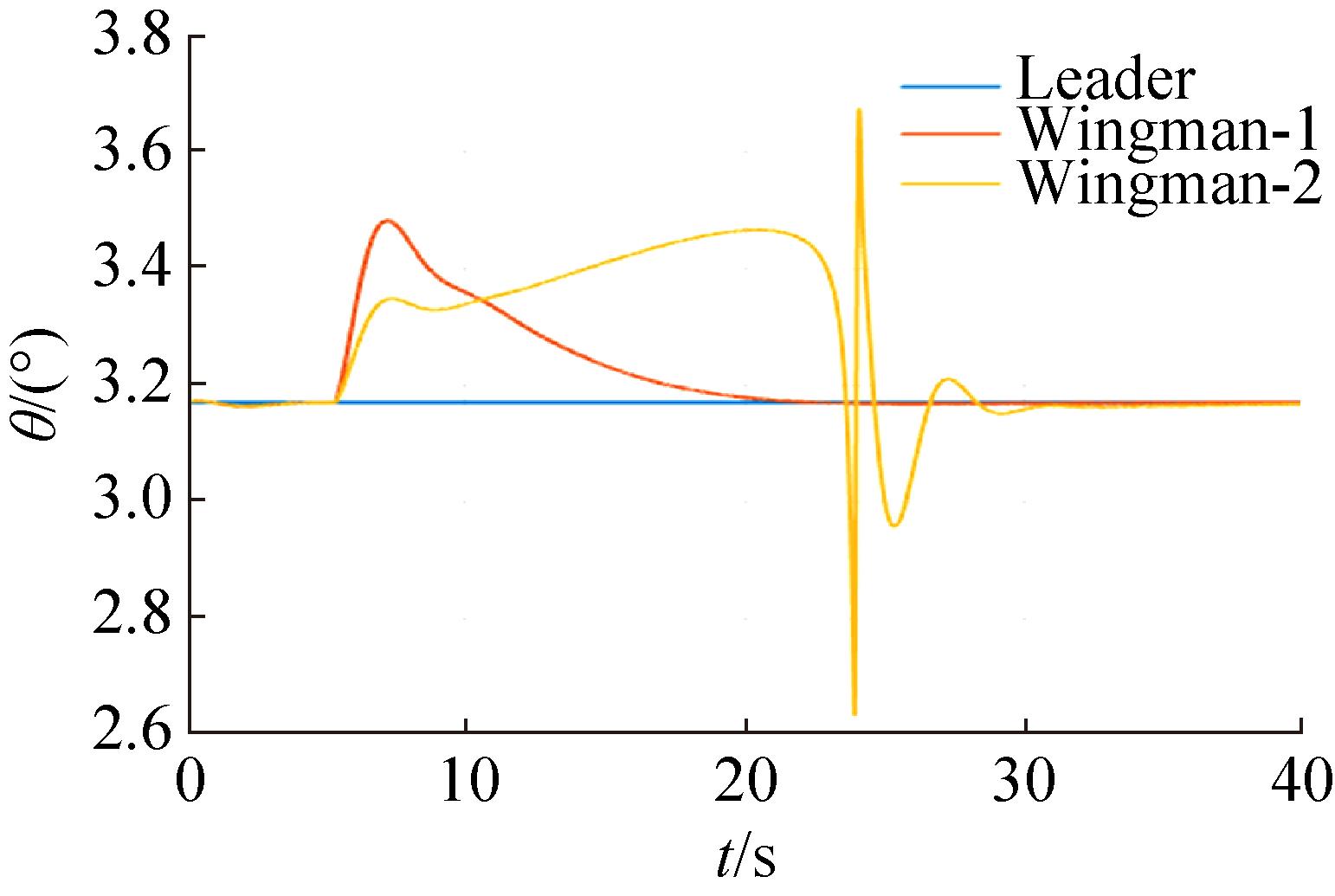
Fig. 14
Roll angle variation curve during wingtip docking process
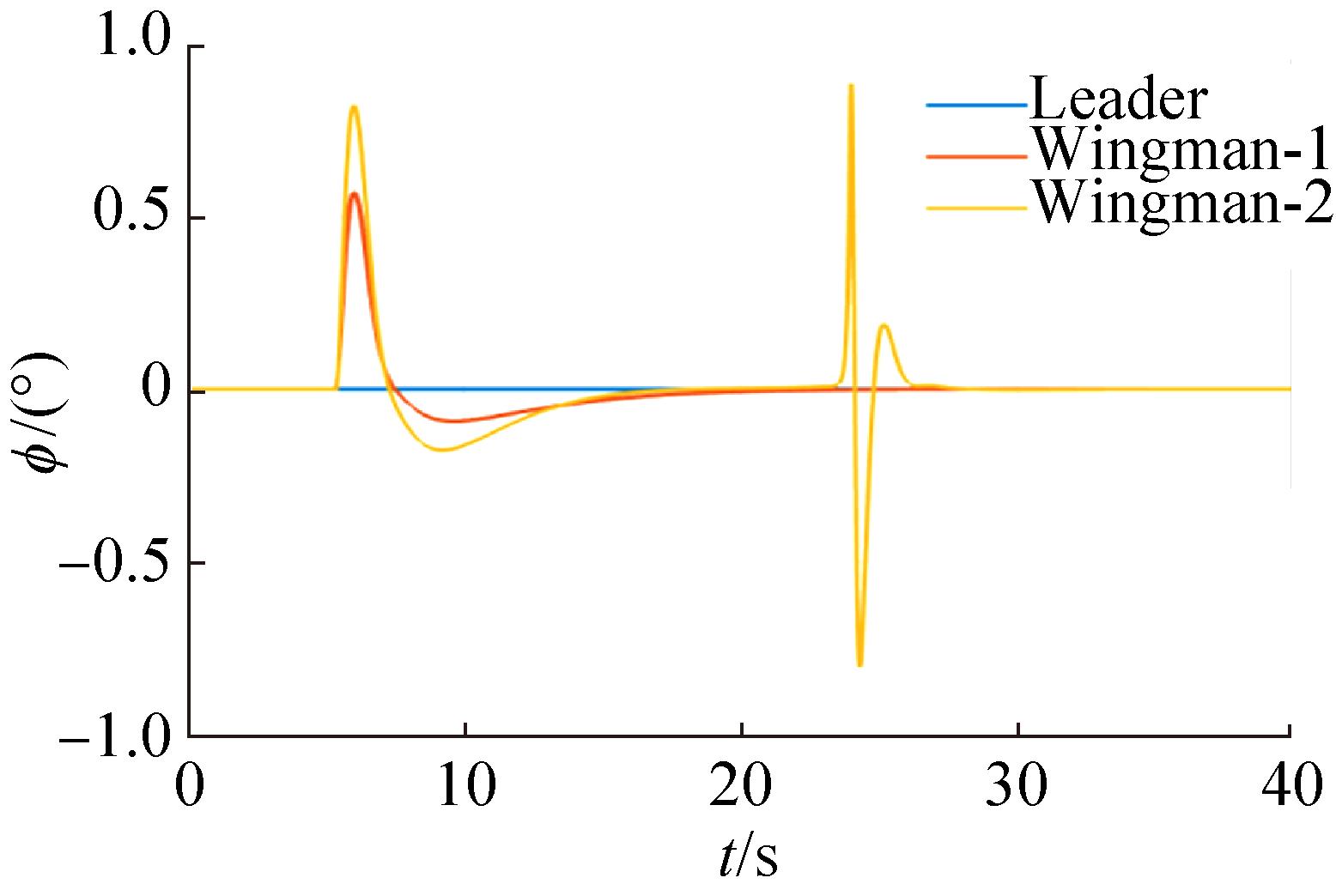
Fig. 15
Yaw angle variation curve during wingtip docking process
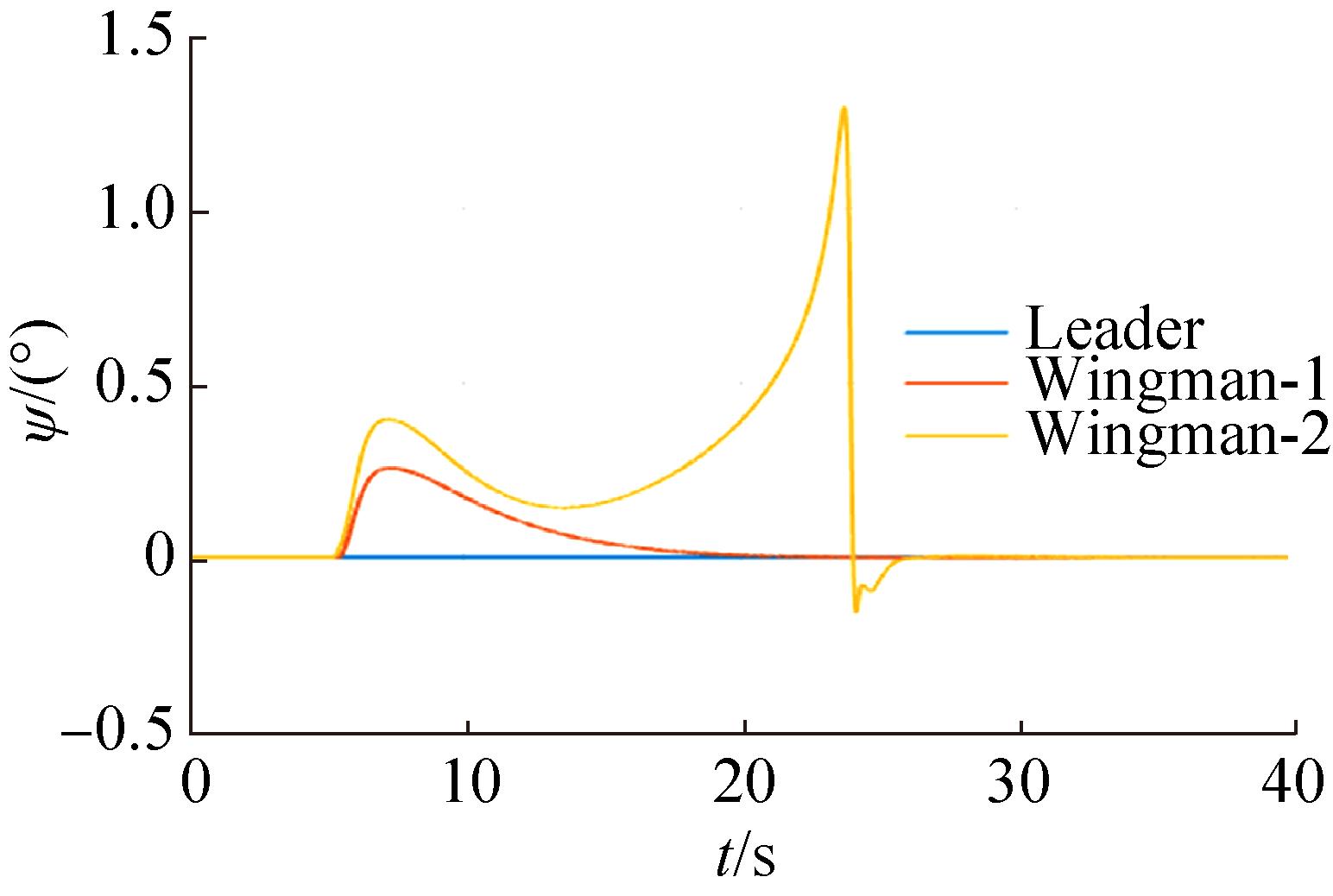
Fig. 16
Rudder curve of the wingman during the wingtip docking process
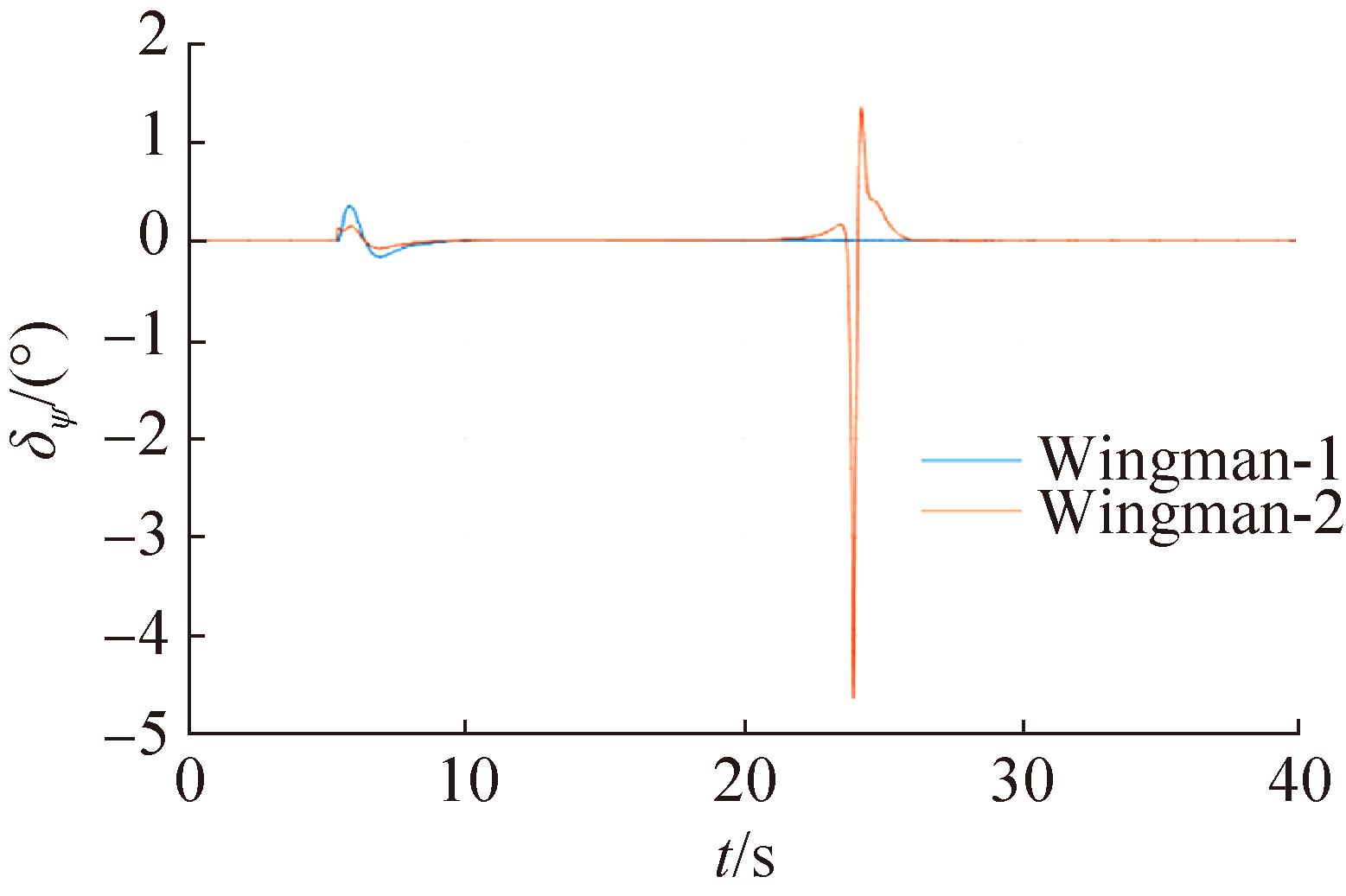
Fig. 17
Aileron curve of the wingman during the wingtip docking process
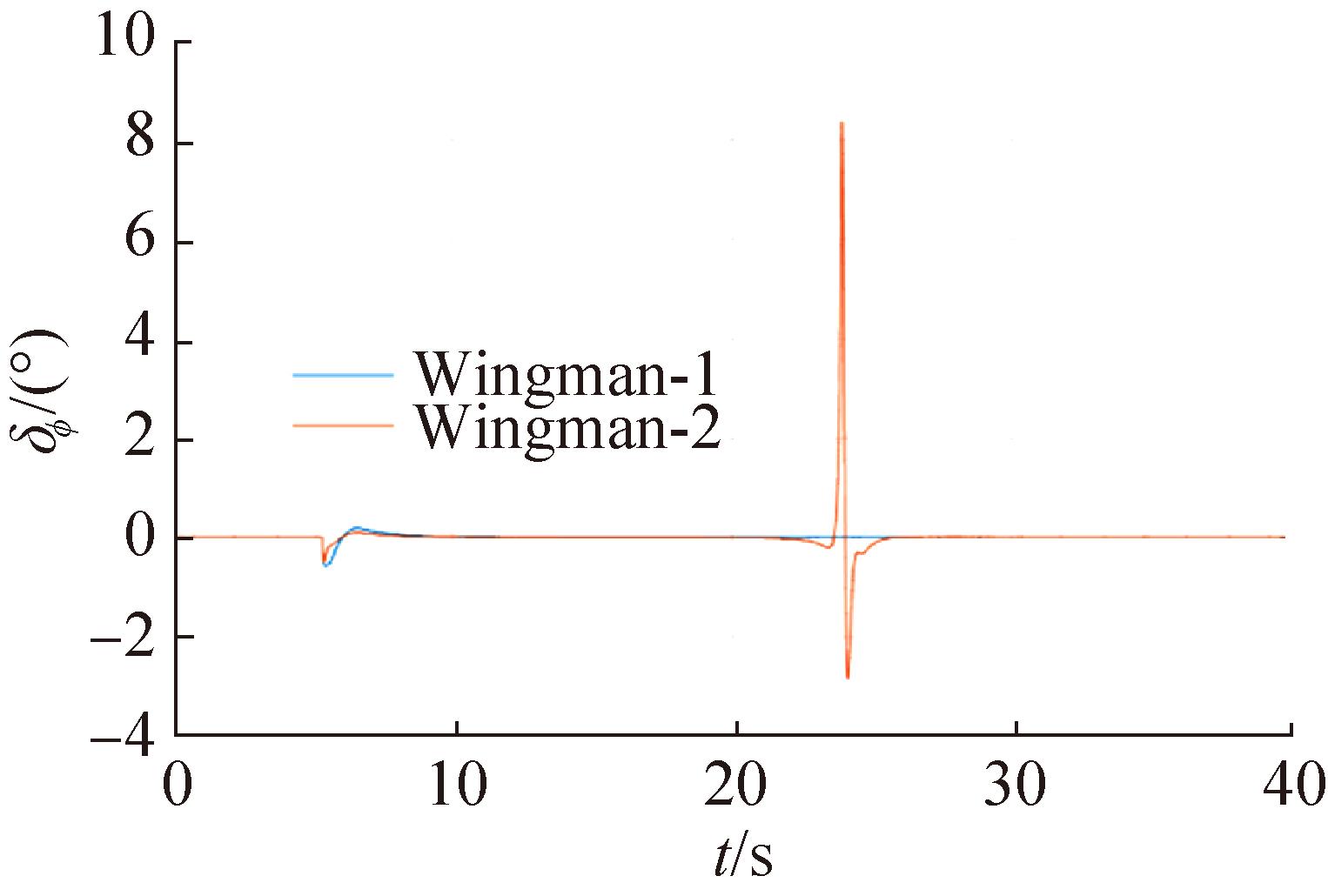
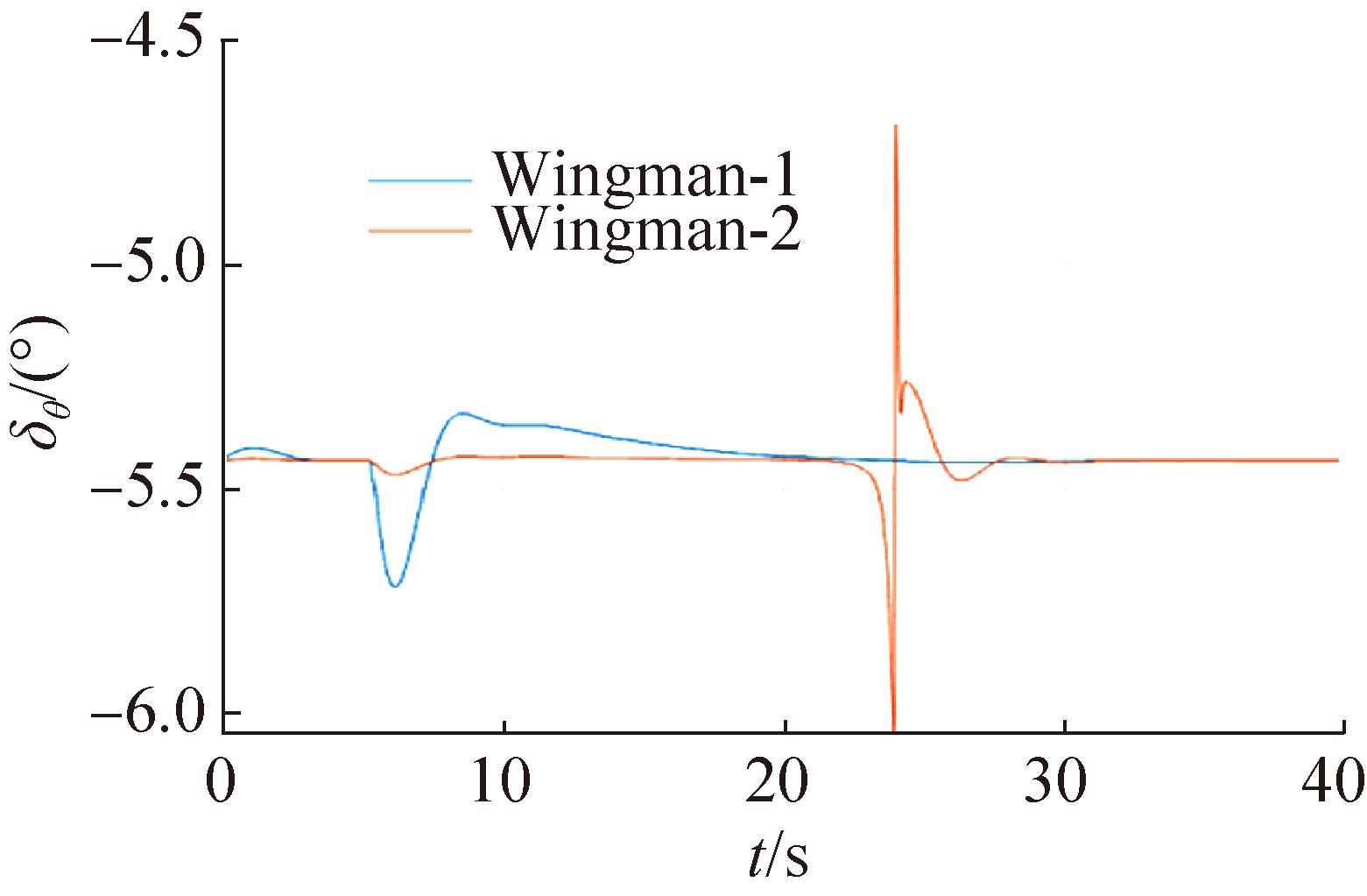
Fig. 18
Elevator curve of the wingman during the wingtip docking process
| [1] | 张旭辉, 解春雷, 刘思佳, 等. 智能变形飞行器发展需求及难点分析[J]. 航空学报, 2023, 44(21): 1-27. |
| Zhang Xuhui, Xie Chunlei, Liu Sijia, et al. Development Needs and Difficulty Analysis for Smart Morphing Aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(21): 1-27. | |
| [2] | Anderson C. Dangerous Experiments: Wingtip Coupling at 15,000 Feet[J]. Flight Journal, 2000, 5(6): 64. |
| [3] | Meng Yang, An Chao, Xie Changchuan, et al. Conceptual Design and Flight Test of Two Wingtip-docked Multi-body Aircraft[J]. Chinese Journal of Aeronautics, 2022, 35(12): 144-155. |
| [4] | An Chao, Xie Changchuan, Meng Yang, et al. Flight Mechanical Analysis and Test of Unmanned Multi-body Aircraft[C]//International Forum on Aeroelasticity and Structural Dynamics, IFASD 2019. 2019: 1-13. |
| [5] | 安朝, 谢长川, 孟杨, 等. 多体组合式无人机飞行力学稳定性分析及增稳控制研究[J]. 工程力学, 2021, 38(11): 248-256. |
| An Chao, Xie Changchuan, Meng Yang, et al. Flight Dynamics and Stable Control Analyses of Multi-body Aircraft[J]. Engineering Mechanics, 2021, 38(11): 248-256. | |
| [6] | 周伟, 马培洋, 郭正, 等. 基于翼尖链翼的组合固定翼无人机研究[J]. 航空学报, 2022, 43(9): 598-614. |
| Zhou Wei, Ma Peiyang, Guo Zheng, et al. Research of Combined Fixed-wing UAV Based on Wingtip Chained[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(9): 598-614. | |
| [7] | 安朝, 霍贵玺, 孟杨, 等. 翼尖铰接组合式无人机气动建模方法及布局参数影响[J]. 航空学报, 2024, 45(6): 167-182. |
| An Chao, Huo Guixi, Meng Yang, et al. Aerodynamic Modeling Methods and Influence of Layout Parameters for Wingtip-hinged Multi-body Combined UAV[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 167-182. | |
| [8] | Liu Dongxu, An Chao, Xie Changchuan, et al. Multibody Dynamic Characteristics of Wingtip-jointed Composite Aircrafts[C]//2019 IEEE 10th International Conference on Mechanical and Aerospace Engineering (ICMAE). Piscataway: IEEE, 2019: 236-240. |
| [9] | 刘东旭, 谢长川, 洪冠新. 翼尖铰接复合飞行器动力学特性研究[J]. 北京航空航天大学学报, 2021, 47(11): 2311-2321. |
| Liu Dongxu, Xie Changchuan, Hong Guanxin. Dynamic Characteristics of Wingtip-jointed Composite Aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(11): 2311-2321. | |
| [10] | 杜万闪, 周洲, 拜昱, 等. 组合式飞行器多体动力学建模与飞行力学特性[J]. 兵工学报, 2023, 44(8): 2245-2262. |
| Du Wanshan, Zhou Zhou, Bai Yu, et al. Study on Multibody Dynamics Modeling and Flight Dynamic Characteristics of Combined Aircraft[J]. Acta Armamentarii, 2023, 44(8): 2245-2262. | |
| [11] | Behrens Alexander, Grund Thomas, Ebert Carola, et al. Investigation of the Aerodynamic Interaction Between Two Wings in a Parallel Flight with Close Lateral Proximity[J]. CEAS Aeronautical Journal, 2020, 11(2): 553-563. |
| [12] | Zhang Qingrui, Liu Hongtao. Aerodynamics Modeling and Analysis of Close Formation Flight[J]. Journal of Aircraft, 2017, 54(6): 2192-2204. |
| [13] | Montalvo C, Costello M. Meta Aircraft Flight Dynamics[J]. Journal of Aircraft, 2015, 52(1): 107-115. |
| [14] | Montalvo C. Meta Aircraft Flight Dynamics and Controls[D]. Atlanta: Geogia Institute of Technology, 2014. |
| [15] | Troub B, Montalvo C. Meta Aircraft Controllability[C]//AIAA Atmospheric Flight Mechanics Conference. Reston: AIAA, 2016: AIAA 2016-3395. |
| [16] | Cooper J R, Rothhaar P M. Dynamics and Control of In-flight Wing Tip Docking[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(11): 2327-2337. |
| [17] | 张贵峰, 陈晓, 崔彦召, 等. 基于自抗扰技术的无人机自主避障研究[J]. 计算机测量与控制, 2017, 25(9): 216-218, 224. |
| Zhang Guifeng, Chen Xiao, Cui Yanzhao, et al. Research on Autonomous Obstacle Avoidance of UAV Based on ADRC[J]. Computer Measurement & Control, 2017, 25(9): 216-218, 224. | |
| [18] | 卢凯文, 杨忠, 张秋雁, 等. 推力矢量可倾转四旋翼自抗扰飞行控制方法[J]. 控制理论与应用, 2020, 37(6): 1377-1387. |
| Lu Kaiwen, Yang Zhong, Zhang Qiuyan, et al. Active Disturbance Rejection Flight Control Method for Thrust-vectored Quadrotor with Tiltable Rotors[J]. Control Theory & Applications, 2020, 37(6): 1377-1387. | |
| [19] | 张钊, 杨忠, 段雨潇, 等. 主动变形四旋翼自抗扰飞行控制方法[J]. 控制理论与应用, 2021, 38(4): 444-456. |
| Zhang Zhao, Yang Zhong, Duan Yuxiao, et al. Active Disturbance Rejection Control Method for Actively Deformable Quadrotor[J]. Control Theory & Applications, 2021, 38(4): 444-456. | |
| [20] | 张勇, 陈增强, 张兴会, 等. 双旋翼无人机串级线性自抗扰控制[J]. 中南大学学报(自然科学版), 2019, 50(3): 564-571. |
| Zhang Yong, Chen Zengqiang, Zhang Xinghui, et al. Attitude Control of Tandem Rotor UAV Based on Cascade Linear Active Disturbance Rejection Control[J]. Journal of Central South University(Science and Technology), 2019, 50(3): 564-571. | |
| [21] | 刘泽群, 代冀阳, 应进, 等. 无人直升机串级LADRC控制器设计及其视景仿真实现[J]. 现代电子技术, 2020, 43(2): 101-105. |
| Liu Zequn, Dai Jiyang, Ying Jin, et al. Design and Visual Simulation of Cascade LADRC for Unmanned Helicopter[J]. Modern Electronics Technique, 2020, 43(2): 101-105. | |
| [22] | 侯朋朋. 纵列式无人直升机悬停抗风控制仿真研究[D]. 南京: 南京航空航天大学, 2021. |
| Hou Pengpeng. Simulation Research on Wind Resistance Control of Hovering Tandem Unmanned Helicopter[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2021. | |
| [23] | 王彦雄, 周洲, 张波, 等. 飞翼布局无人机反演自抗扰姿态控制[J]. 飞行力学, 2017, 35(2): 30-34, 38. |
| Wang Yanxiong, Zhou Zhou, Zhang Bo, et al. Flying-wing Attitude Control Based on Backstepping and Active Disturbance Rejection Control[J]. Flight Dynamics, 2017, 35(2): 30-34, 38. | |
| [24] | 胡守一. UUV水下回收自抗扰控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2019. |
| Hu Shouyi. Research on Underwater Recovery of UUV Base on Active Disturbance Rejection Control[D]. Harbin: Harbin Engineering University, 2019. | |
| [25] | 李凯凯. 基于自抗扰的空间交会对接轨道控制研究[D]. 合肥: 中国科学技术大学, 2015. |
| Li Kaikai. Study on the Orbit Control of Space Rendezvous and Docking Using Active Disturbance Rejection Control[D]. Hefei: University of Science and Technology of China, 2015. | |
| [26] | 黄永康. 基于直接力的空中加油对接飞行控制及仿真[D]. 南京: 南京航空航天大学, 2021. |
| Huang Yongkang. Flight Control and Simulation of Aerial Refueling Docking Based on Direct Force[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2021. | |
| [27] | Etkin B. Dynamics of Atmospheric Flight[M]. New York: Dover Publications, 2005: 141-145. |
| [28] | Binetti Paolo, Ariyur Kartik B, Krstic Miroslav, et al. Formation Flight Optimization Using Extremum Seeking Feedback[J]. Journal of Guidance, Control, and Dynamics, 2003, 26(1): 132-142. |
| [29] | 韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998, 13(1): 19-23. |
| Han Jingqing. Auto-disturbances-rejection Controller and Its Applications[J]. Control and Decision, 1998, 13(1): 19-23. | |
| [30] | 段永杰, 王江磊, 陈仁涛. 自抗扰控制技术研究及应用[J]. 决策探索(中), 2018(7): 85-86. |
| [31] | 申遂愿, 徐锦法. 无人飞行器自抗扰控制研究进展[J]. 中南大学学报(自然科学版), 2021, 52(4): 1197-1212. |
| Shen Suiyuan, Xu Jinfa. Research Progress in Active Disturbance Rejection Control of Unmanned Aerial Vehicle[J]. Journal of Central South University(Science and Technology), 2021, 52(4): 1197-1212. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
