

Journal of System Simulation ›› 2022, Vol. 34 ›› Issue (12): 2659-2669.doi: 10.16182/j.issn1004731x.joss.22-FZ0926
• VV&A Technology • Previous Articles Next Articles
Qiao Qiao( ), Yan Wang(), Zhicheng Ji
), Yan Wang(), Zhicheng Ji
Received:2022-08-07
Revised:2022-09-23
Online:2022-12-31
Published:2022-12-21
Contact:
Yan Wang
E-mail:905523350@qq.com;wangyan@jiangnan.edu.cn
CLC Number:
Qiao Qiao, Yan Wang, Zhicheng Ji. Multi-robot Path Planning Based on CBS Algorithm[J]. Journal of System Simulation, 2022, 34(12): 2659-2669.
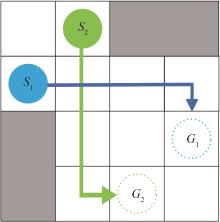
Fig. 1
Robot moving path diagram
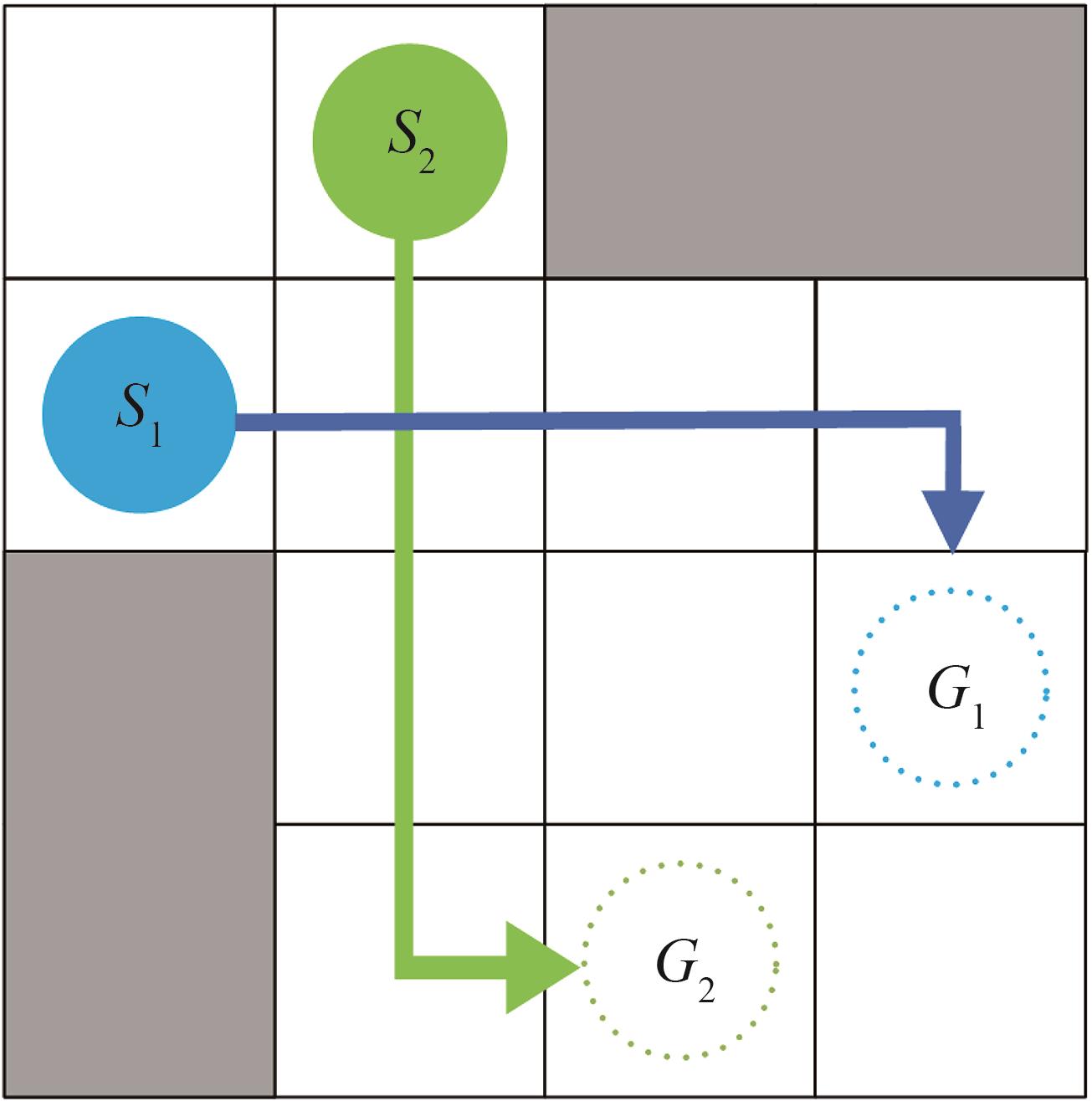
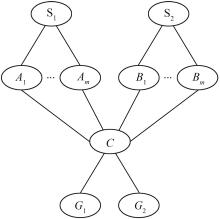
Fig. 2
MAPF case
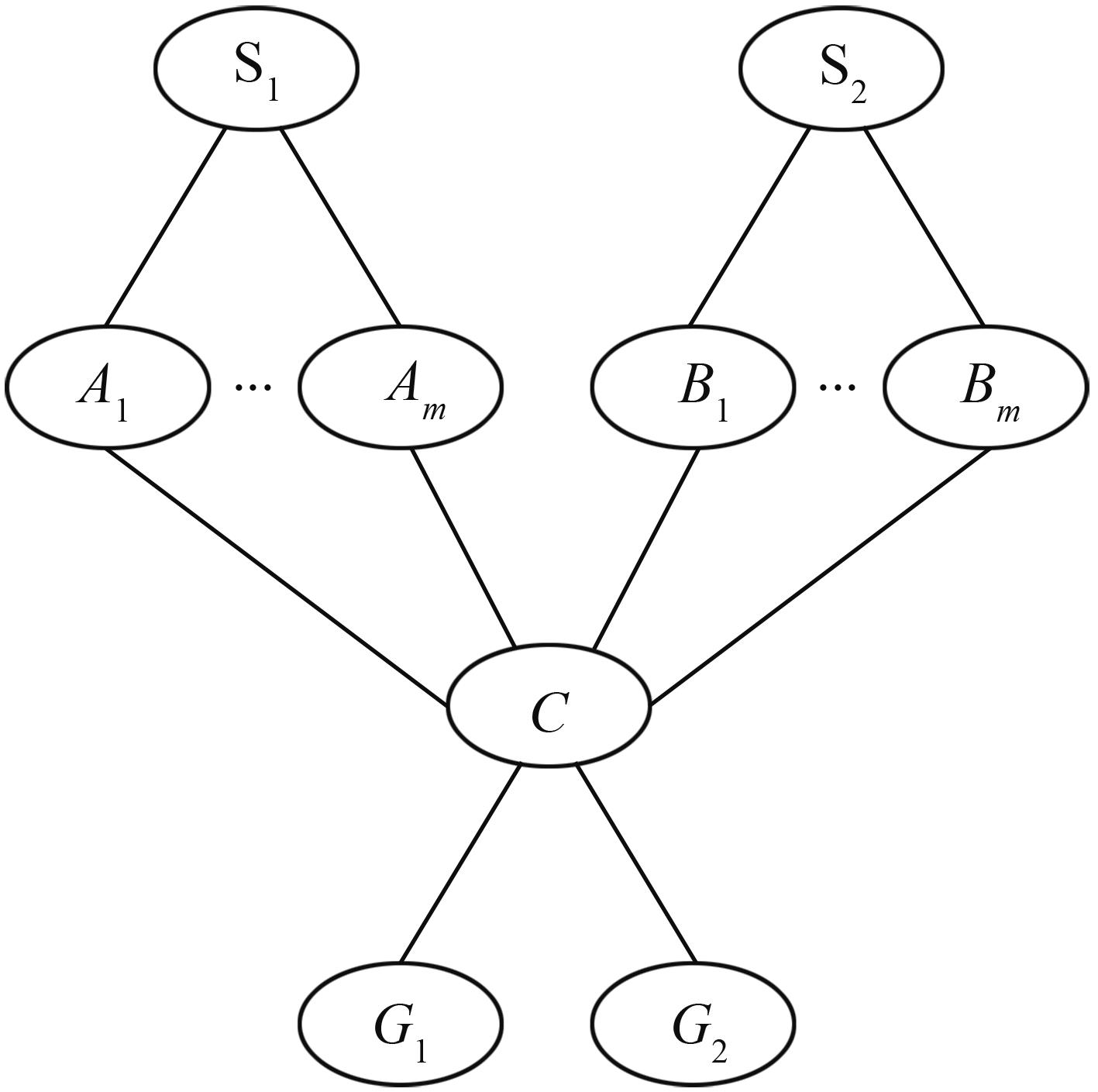

Fig. 3
Binary tree CT
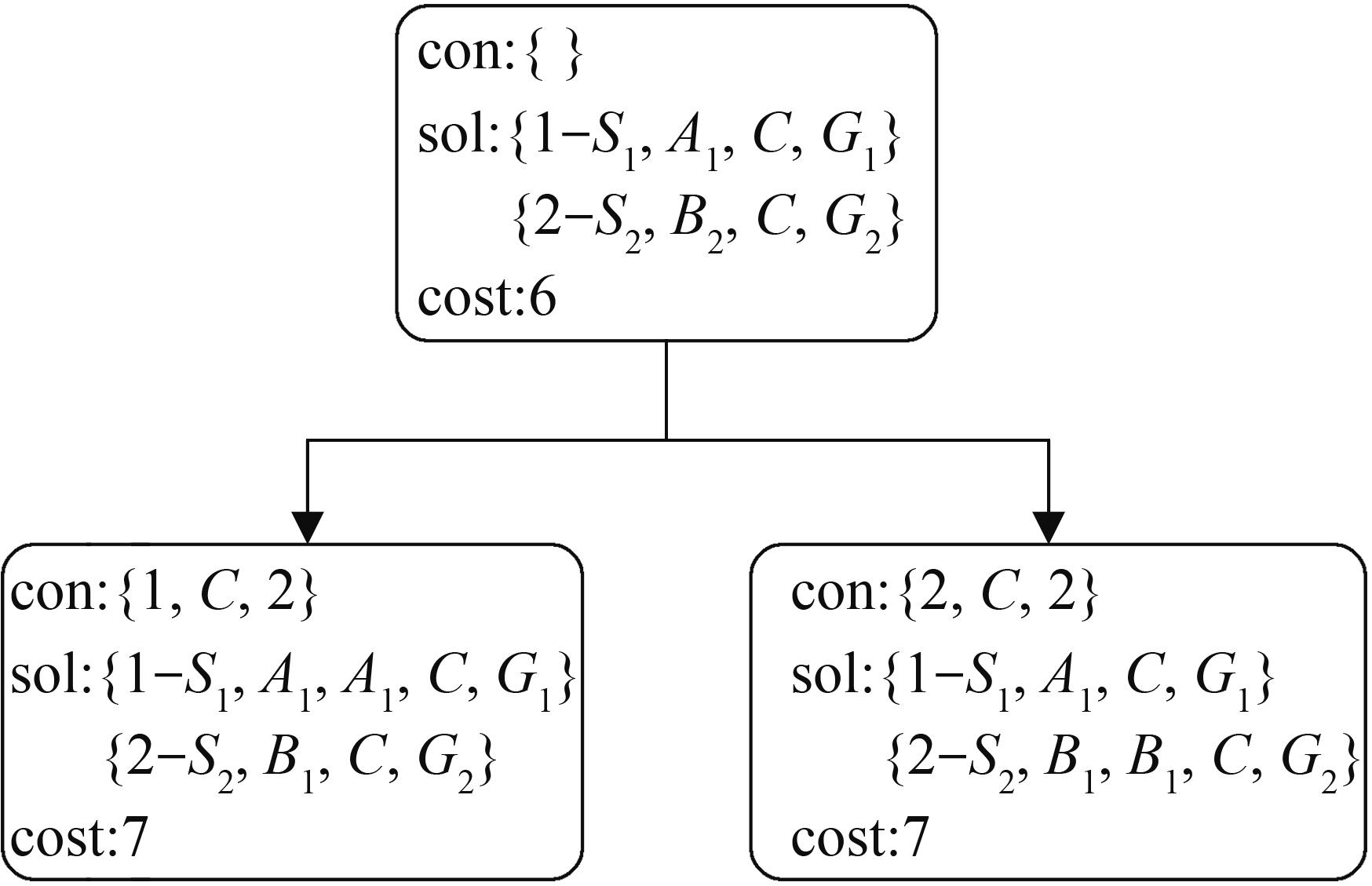
Fig. 4
ECBS operation process
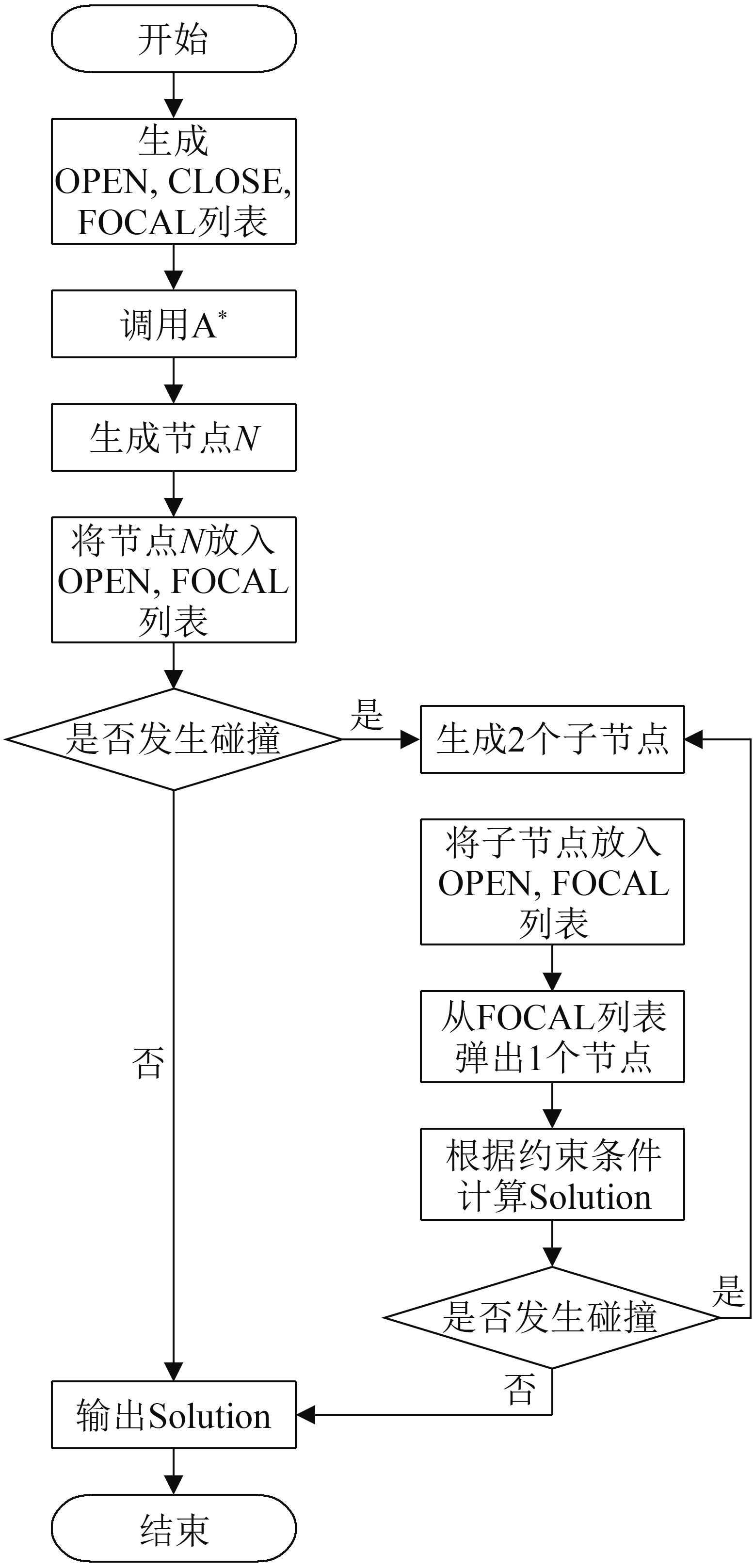
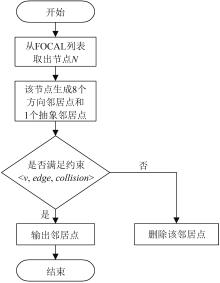
Fig. 5
Looking for neighbor points
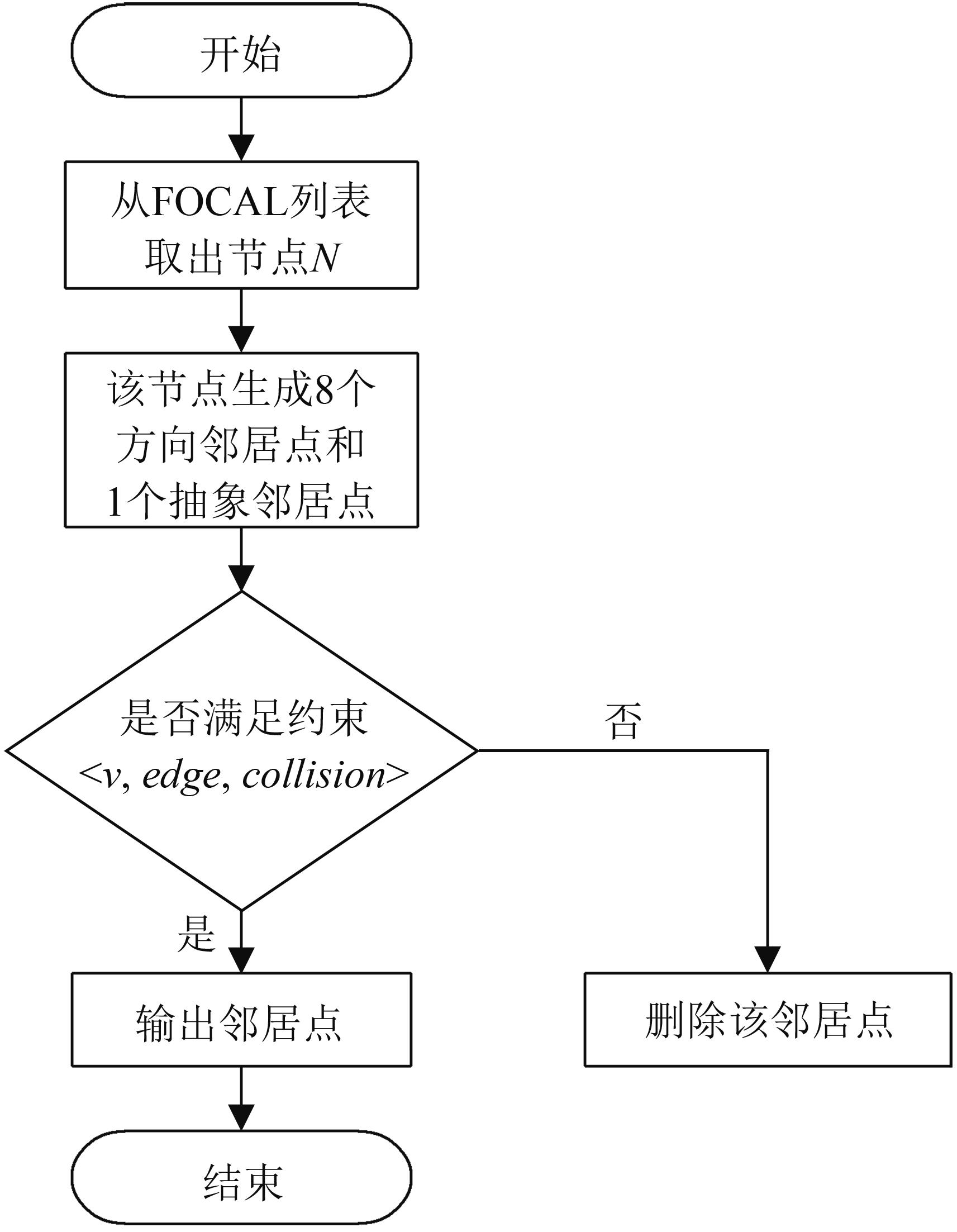
Fig. 6
Finding neighbor points in reverse
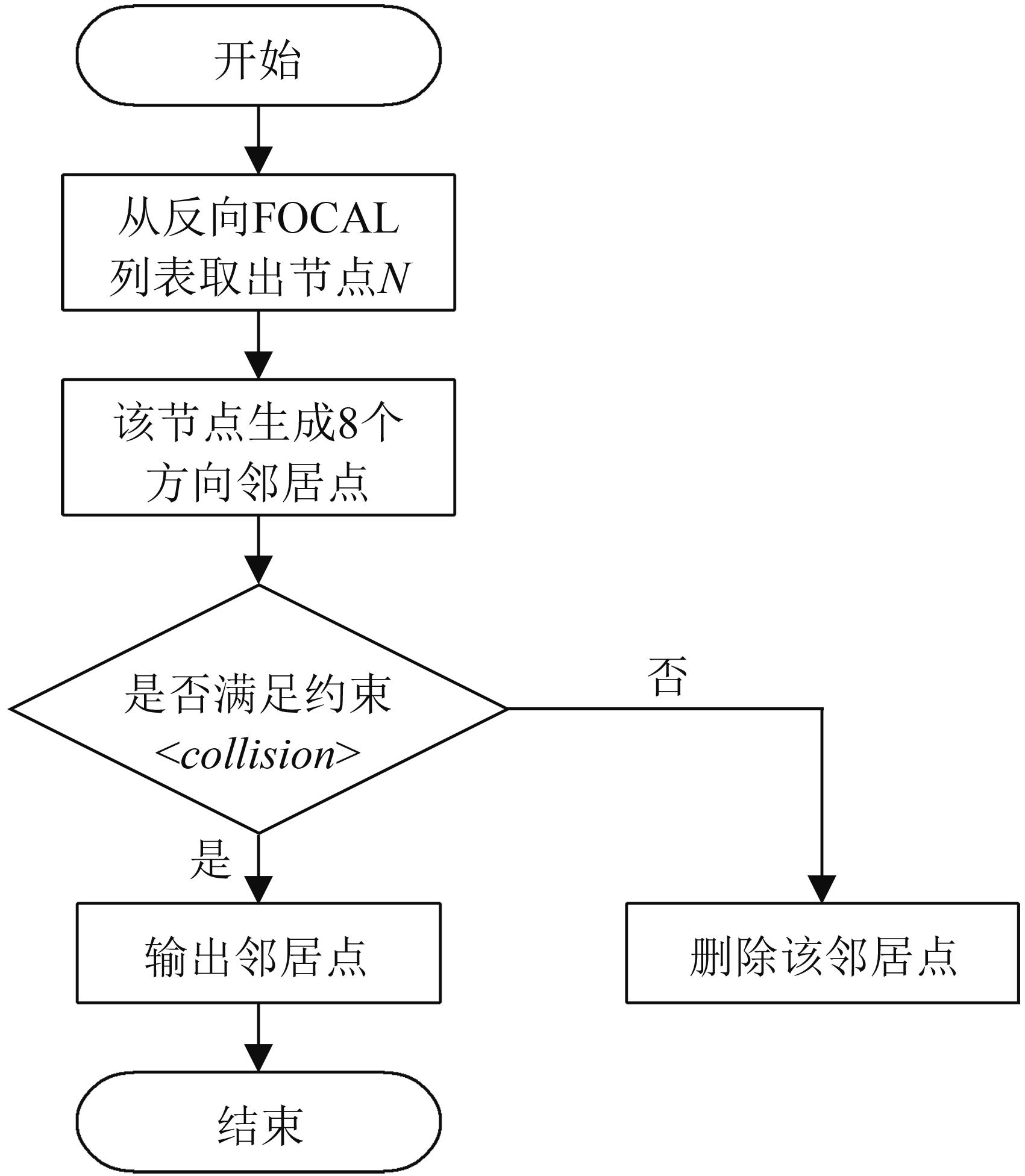
Fig. 7
Collision handling process
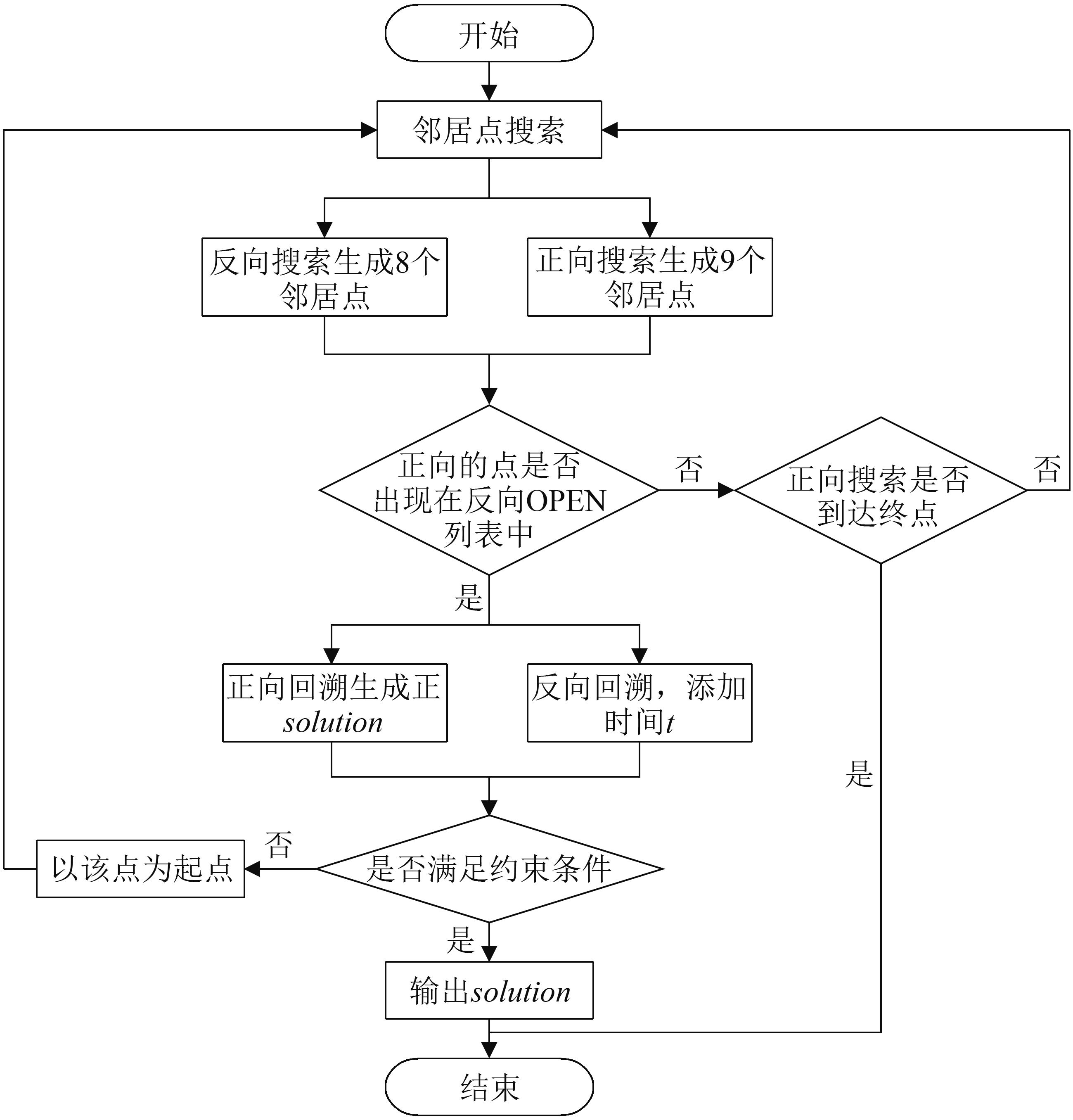
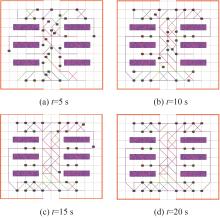
Fig. 8
32 robots run track in warehouse

Table 1
Running time comparison
| 机器人 数量/个 | ECBS运行时间/s | 改进ECBS 运行时间/s | 运行时间降低百分比/% |
|---|---|---|---|
| 4 | 0.000 43 | 0.000 42 | 2.32 |
| 8 | 0.000 59 | 0.000 58 | 1.69 |
| 12 | 0.000 85 | 0.000 72 | 15.3 |
| 16 | 0.001 29 | 0.001 14 | 11.6 |
| 20 | 0.002 43 | 0.002 50 | -2.88 |
| 24 | 0.005 93 | 0.004 14 | 30.2 |
| 28 | 0.017 94 | 0.017 39 | 3.07 |
| 32 | 0.071 10 | 0.018 10 | 74.5 |
Fig. 9
Comparison of path costs with different suboptimal factors
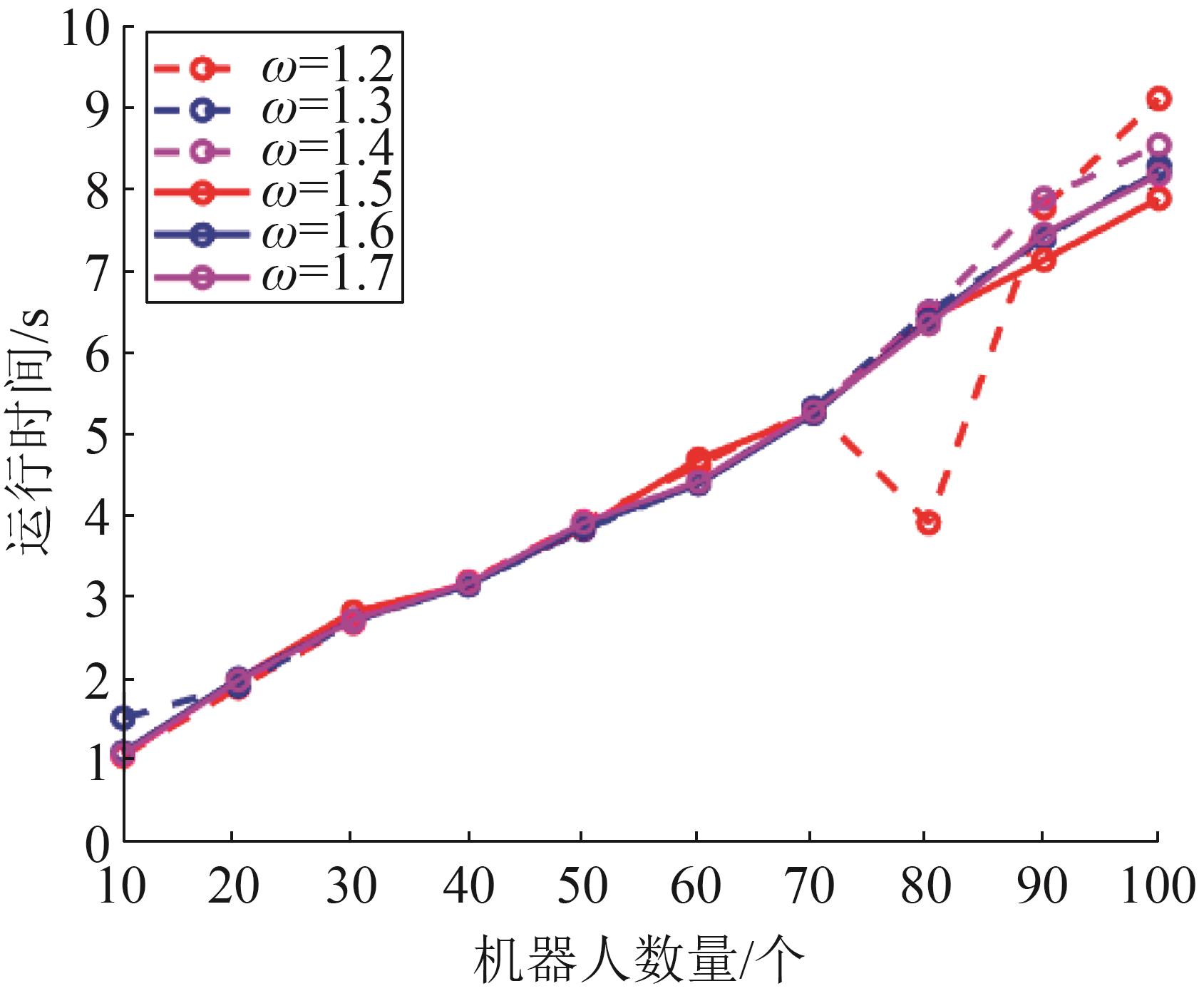
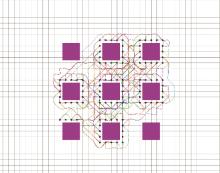
Fig. 10
100 robots run track in warehouse
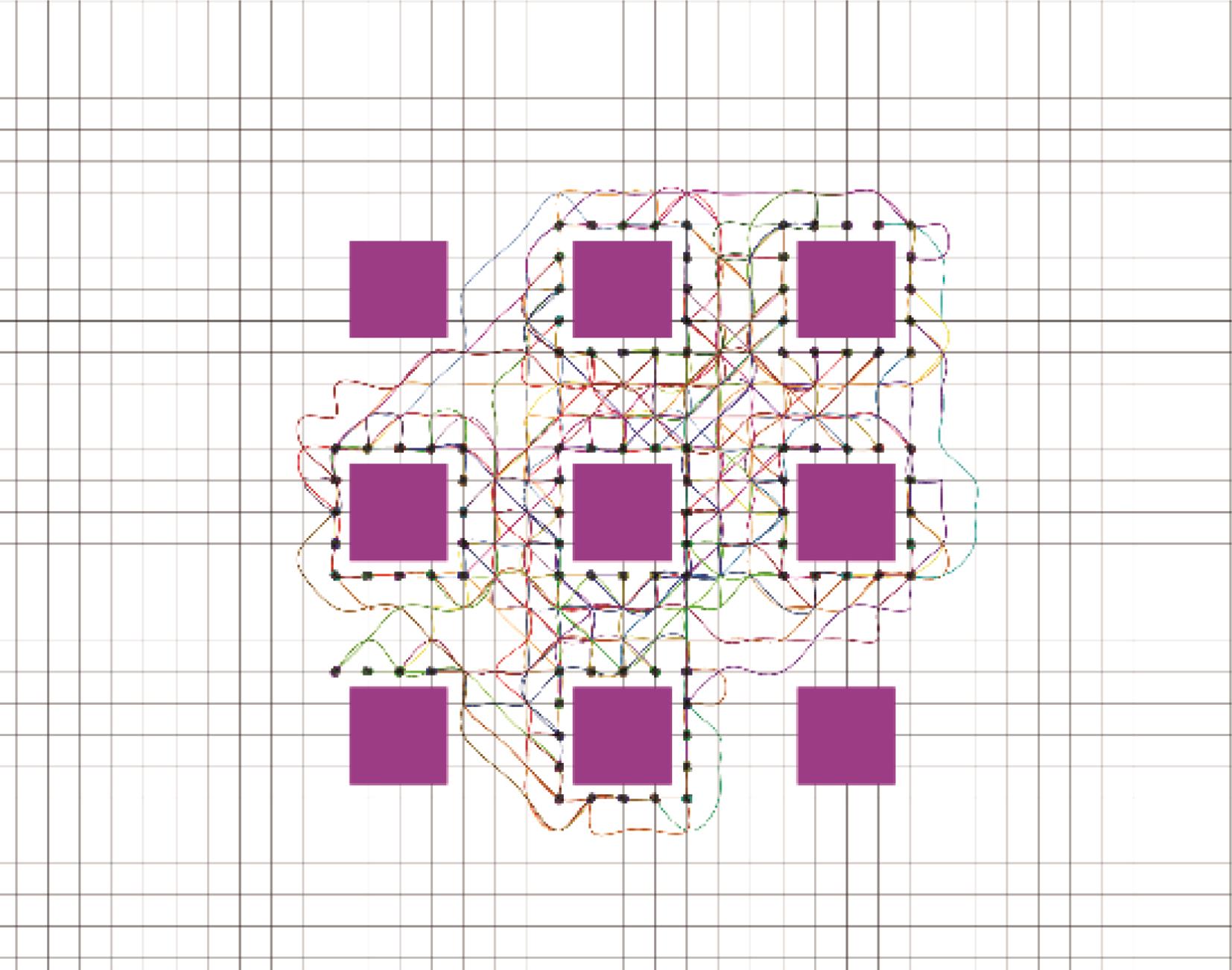
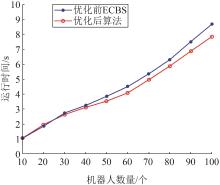
Fig. 11
Comparison of total running time in warehouse
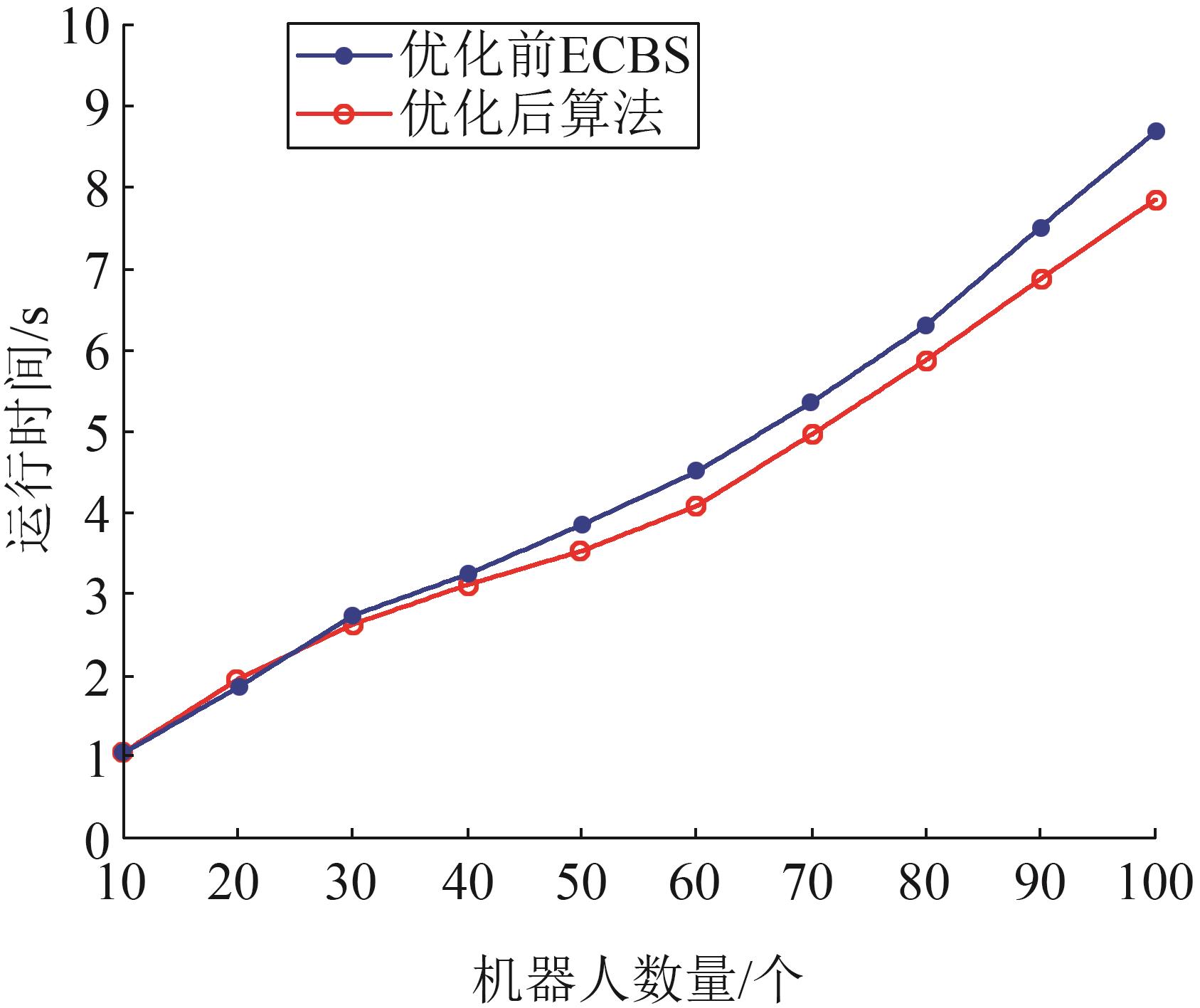
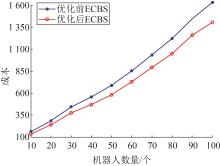
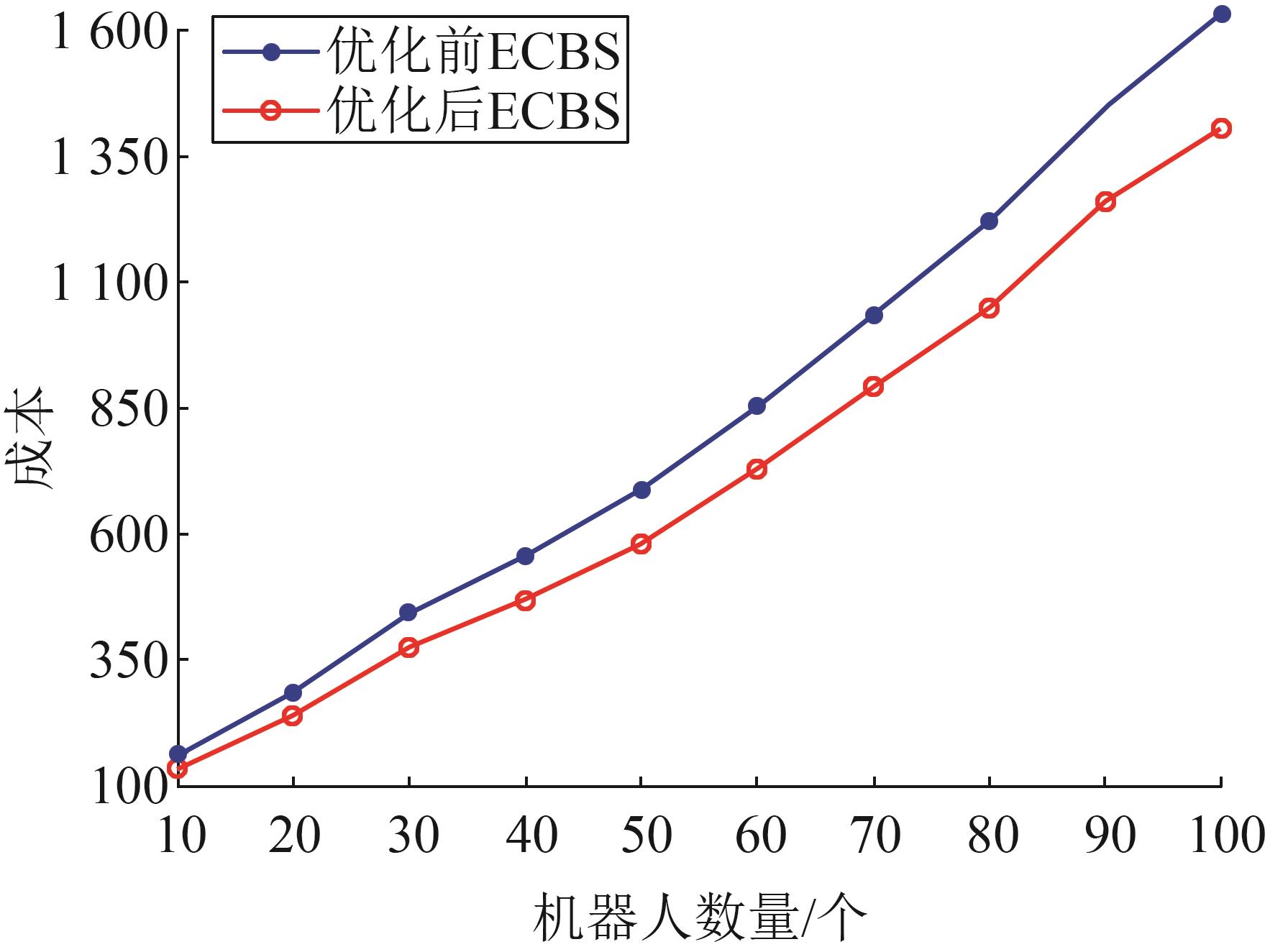
Fig. 12
Route cost comparison in warehouse
| 1 | 刘晶, 姚维, 章玮. 移动机器人全覆盖路径规划算法研究[J]. 工业控制计算机, 2019, 32(12): 52-54. |
| Liu Jing, Yao Wei, Zhang Wei. Research on Complete Coverage Path Planning Algorithm of Mobile Robots[J]. Industrial Control Computer, 2019, 32(12): 52-54. | |
| 2 | 王洪斌, 尹鹏衡, 郑维, 等. 基于改进的A*算法与动态窗口法的移动机器人路径规划[J]. 机器人, 2020, 42(3): 346-353. |
| Wang Hongbin, Yin Pengheng, Zheng Wei, et al. Mobile Robot Path Planning Based on Improved A* Algorithm and Dynamic Window Method[J]. Robot, 2020, 42(3): 346-353. | |
| 3 | 强宁, 高洁, 康凤举. 基于PSO和三次样条插值的多机器人全局路径规划[J]. 系统仿真学报, 2017, 29(7): 1397-1404. |
| Qiang Ning, Gao Jie, Kang Fengju. Multi-Robot Global Path Planning Based on PSO and Cubic Spline Interpolation[J]. Journal of System Simulation, 2017, 29(7): 1397-1404. | |
| 4 | 张云旺. 物流中心多任务场景下多AGV的路径规划算法设计[D]. 哈尔滨: 哈尔滨工业大学, 2021. |
| Zhang Yunwang. Path Planning Algorithm Design of Multi-AGV in Multi-Task Scenario of Logistics Center[D]. Harbin: Harbin Institute of Technology, 2021. | |
| 5 | 杨伦. 消解基于冲突搜索的多智能体路径规划算法中的对顶冲突[D]. 长春: 吉林大学, 2020. |
| Yang Lun. Resolving the Top Conflict in the Multi-Agent Path Planning Algorithm Based on Conflict Search[D]. Changchun: Jilin University, 2020. | |
| 6 | 万千. 基于CBS算法的物流分拣多AGV路径规划的研究[D]. 哈尔滨: 哈尔滨工业大学, 2018. |
| Wan Qian. Research on Multi-AGV Path Planning for Logistics Sorting Based on CBS Algorithm[D]. Harbin: Harbin Institute of Technology, 2018. | |
| 7 | Li Jiaoyang, Andrew Tinka, Scott Kiesel, et al. EECBS: A Bounded-Suboptimal Search for Multi-Agent Path Finding[C]//35th AAAI Conference on Artificial Intelligence. California, SC: Association for the Advancement of Artificial Intelligence, 2021: 12353-12362. |
| 8 | 朱宝艳. 移动机器人全覆盖路径规划算法研究[D]. 淄博: 山东理工大学, 2017. |
| Zhu Baoyan. Research on Complete Coverage Planning Algorithm for Mobile Robots[D]. Zibo: Shandong University of Technology, 2017. | |
| 9 | 赵萍, 雷新宇, 陈波芝, 等. 基于TI-A*的多机器人动态规划协调方法研究[J]. 系统仿真学报, 2019, 31(5): 925-935. |
| Zhao Ping, Lei Xinyu, Chen Bozhi, et al. Research on Multi-Robot Dynamic Programming Coordination Method Based on TI-A*[J]. Journal of System Simulation, 2019, 31(5): 925-935. | |
| 10 | 李颀, 汪伟. 多全向轮协同分拣平台的路径规划[J]. 系统仿真学报, 2021, 33(3): 698-709. |
| Li Qi, Wang Wei. Path Planning of Multi-omnidirectional Wheel Collaborative Sorting Platform [J]. Journal of System Simulation, 2021, 33(3): 698-709. | |
| 11 | 陈志梅, 李敏, 邵雪卷, 等. 基于改进RRT算法的桥式起重机避障路径规划[J]. 系统仿真学报, 2021, 33(8): 1832-1838. |
| Chen Zhimei, Li Min, Shao Xuejuan, et al. Obstacle Avoidance Path Planning of Bridge Crane Based on Improved RRT Algorithm[J]. Journal of System Simulation, 2021, 33(8): 1832-1838. | |
| 12 | 黄晓冬, 苑海涛, 毕敬, 等. 基于DQN的海战场舰船路径规划及仿真[J]. 系统仿真学报, 2021, 33(10): 2440-2448. |
| Huang Xiaodong, Yuan Haitao, Bi Jing, et al. Ship Path Planning and Simulation in Naval Battlefield Based on DQN[J]. Journal of System Simulation, 2021, 33(10): 2440-2448. | |
| 13 | 林彬, 韩光辉, 宋晨晨, 等. 基于辐射扫描算法的机器人路径规划与仿真[J]. 系统仿真学报, 2021, 33(1): 84-90. |
| Lin Bin, Han Guanghui, Song Chenchen, et al. Robot Path Planning and Simulation Based on Radiation Scanning Algorithm[J]. Journal of System Simulation, 2021, 33(1): 84-90. | |
| 14 | 刘恒麟. 多AGV路径规划算法的研究与实现[D]. 南京: 东南大学, 2020. |
| Liu Henglin. Research and Implementation of Multi-AGV Path Planning Algorithm[D]. Nanjing: Southeast University, 2020. | |
| 15 | Li Jiaoyang, Andrew Tinka, Scott Kiesel, et al. Lifelong Multi-Agent Path Finding in Large-Scale Warehouses[C]//35th AAAI Conference on Artificial Intelligence. California, SC: Association for the Advancement of Artificial Intelligence, 2021: 11272-11281. |
| 16 | Li J, Ran M, Xie L. Efficient Trajectory Planning for Multiple Non-holonomic Mobile Robots Via Prioritized Trajectory Optimization[C]//IEEE Robotics and Automation Letters, 2021, 6(2): 405-412. DOI: 10.1109/LRA.2020.3044834 . |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
