

系统仿真学报 ›› 2026, Vol. 38 ›› Issue (5): 1466-1483.doi: 10.16182/j.issn1004731x.joss.25-0541
• • 上一篇
秦浪1,2, 谢嘉成1,2, 乔晓军1,3, 王学文1,2, 肖智杰1,2
收稿日期:2025-06-10
修回日期:2025-08-19
出版日期:2026-05-21
发布日期:2026-05-29
通讯作者:
王学文
第一作者简介:秦浪(2001-),男,硕士生,研究方向为人机装备协同运行。
基金资助:Qin Lang1,2, Xie Jiacheng1,2, Qiao Xiaojun1,3, Wang Xuewen1,2, Xiao Zhijie1,2
Received:2025-06-10
Revised:2025-08-19
Online:2026-05-21
Published:2026-05-29
Contact:
Wang Xuewen
摘要:
为解决机器人执行器异常位姿对机器人轨迹的影响,提出一种虚实融合的轨迹自适应规划调整方法。引入AR技术耦合机器人运动学模型,通过三维虚实位姿同步比对取代多传感器硬件依赖;结合AR手势与语音交互简化操作流程;基于执行器实际位姿动态调整机器人末端轴轨迹。实验结果表明:该方法突破传统校准的技术与成本限制,设备需求减少且部署成本降低;校对效率提升,操作专业性要求弱化;机器人轨迹自适应规划调整能力增强,尤其解决现有规划算法对外部环境响应成熟但对执行器本体位姿突变响应不足的缺陷,为机器人作业提供了高适应性、低成本的执行器位姿校准与轨迹优化新范式。
中图分类号:
秦浪,谢嘉成,乔晓军等 . 执行器位姿异常的机器人轨迹规划调整方法[J]. 系统仿真学报, 2026, 38(5): 1466-1483.
Qin Lang,Xie Jiacheng,Qiao Xiaojun,et al . Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator[J]. Journal of System Simulation, 2026, 38(5): 1466-1483.
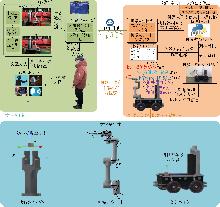
图1
技术路线
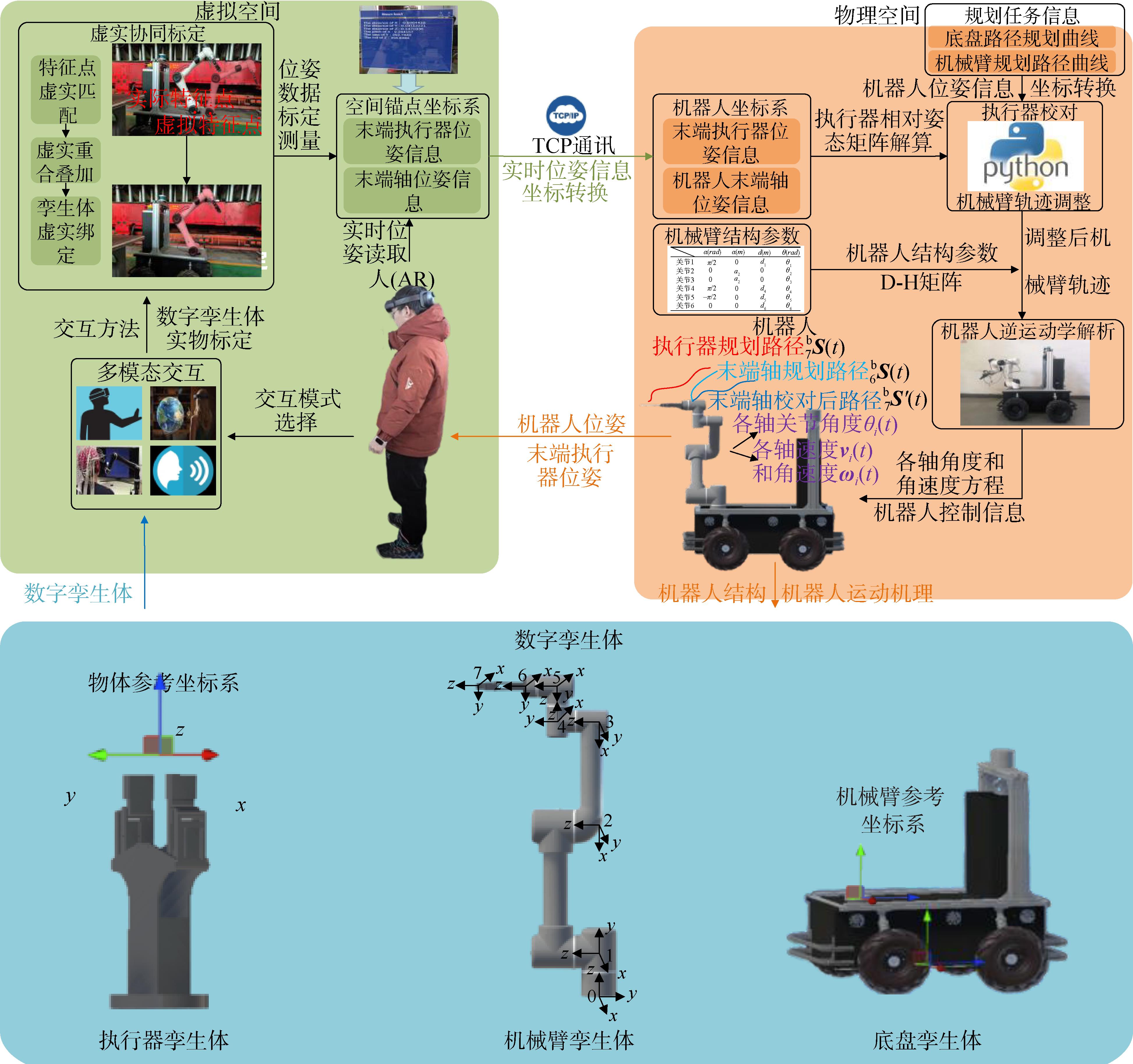
图2
机器人轨迹自适应调整流程
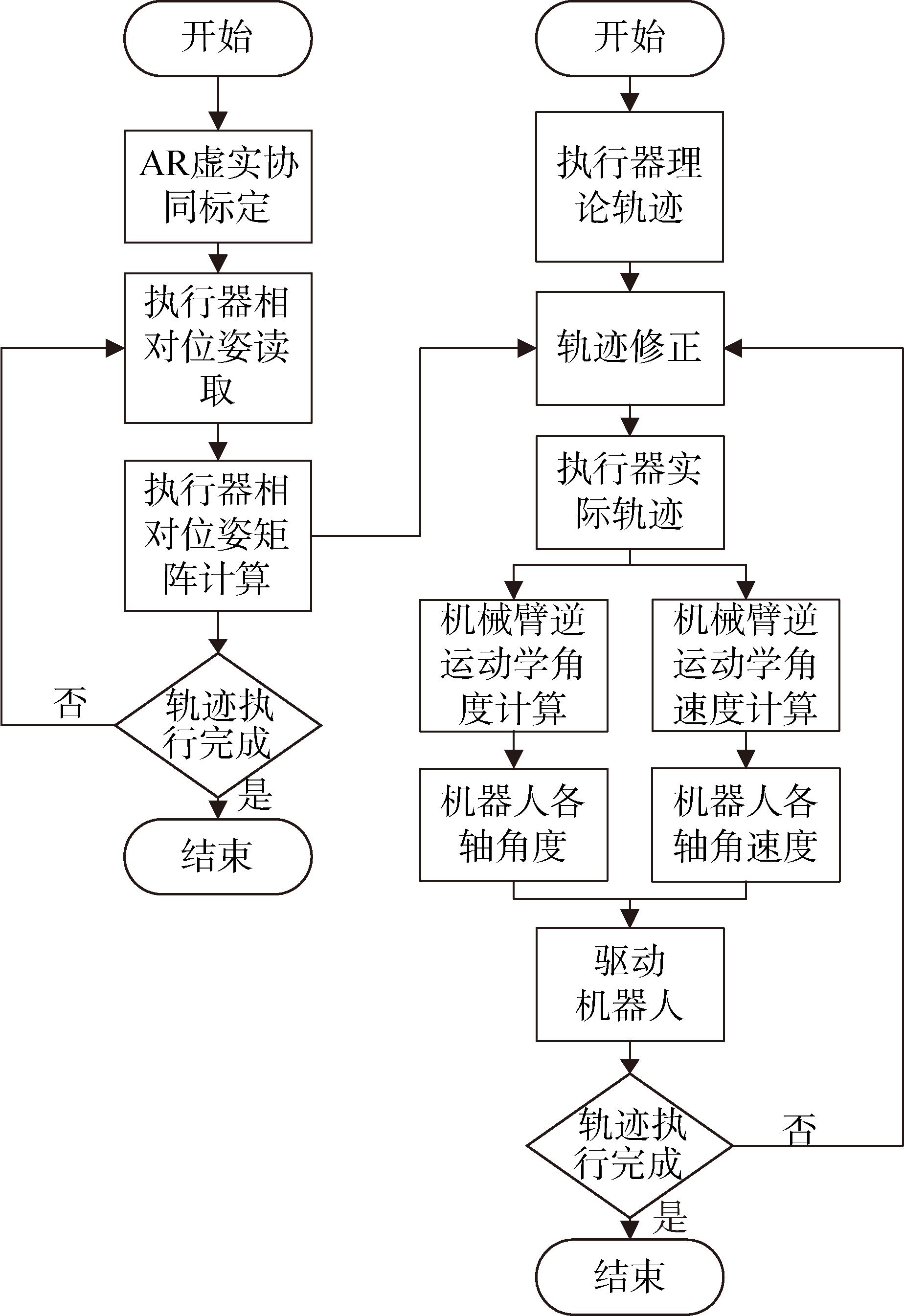
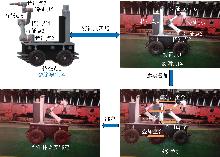
图3
虚实协同标定
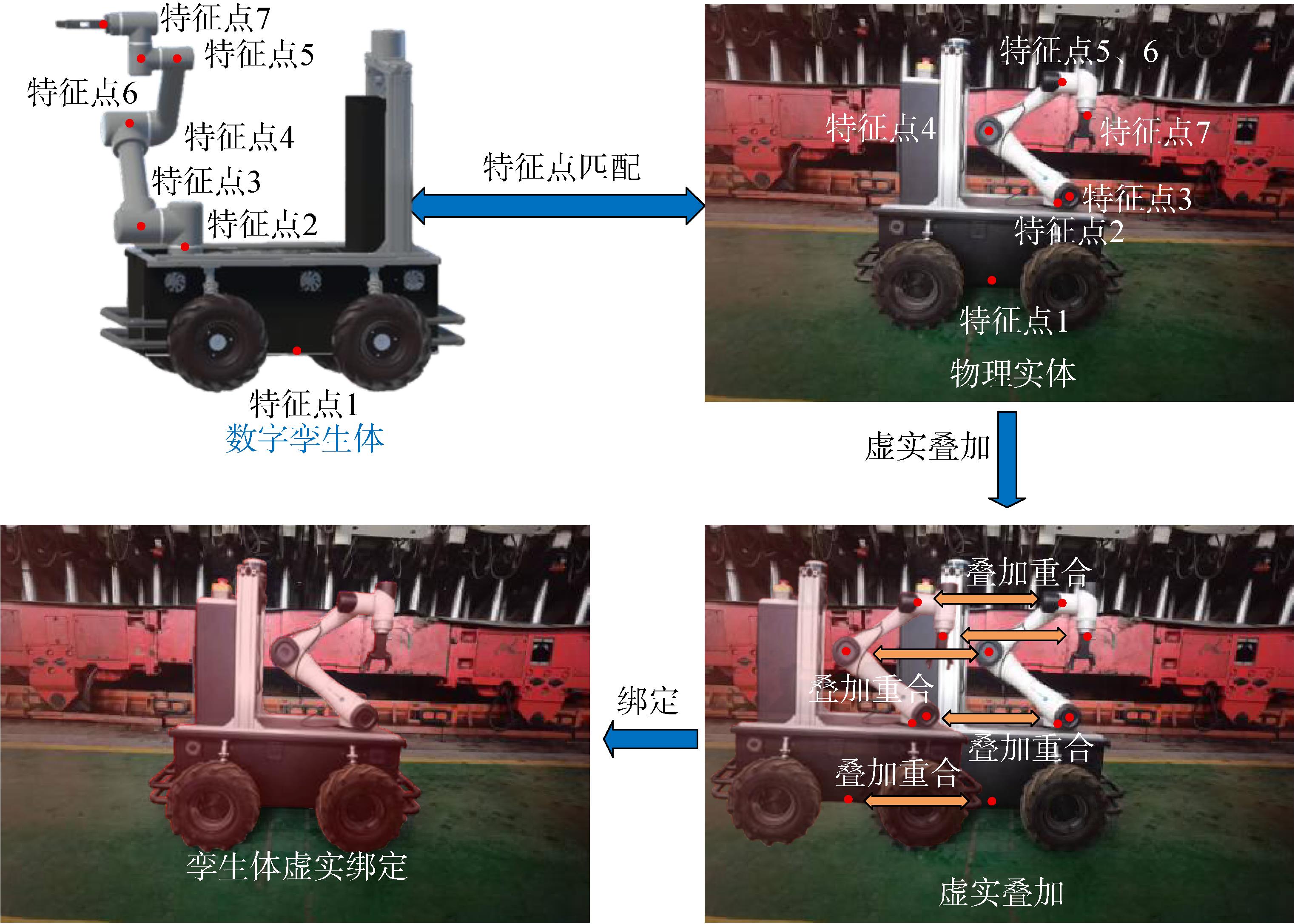
图4
执行器校对规划
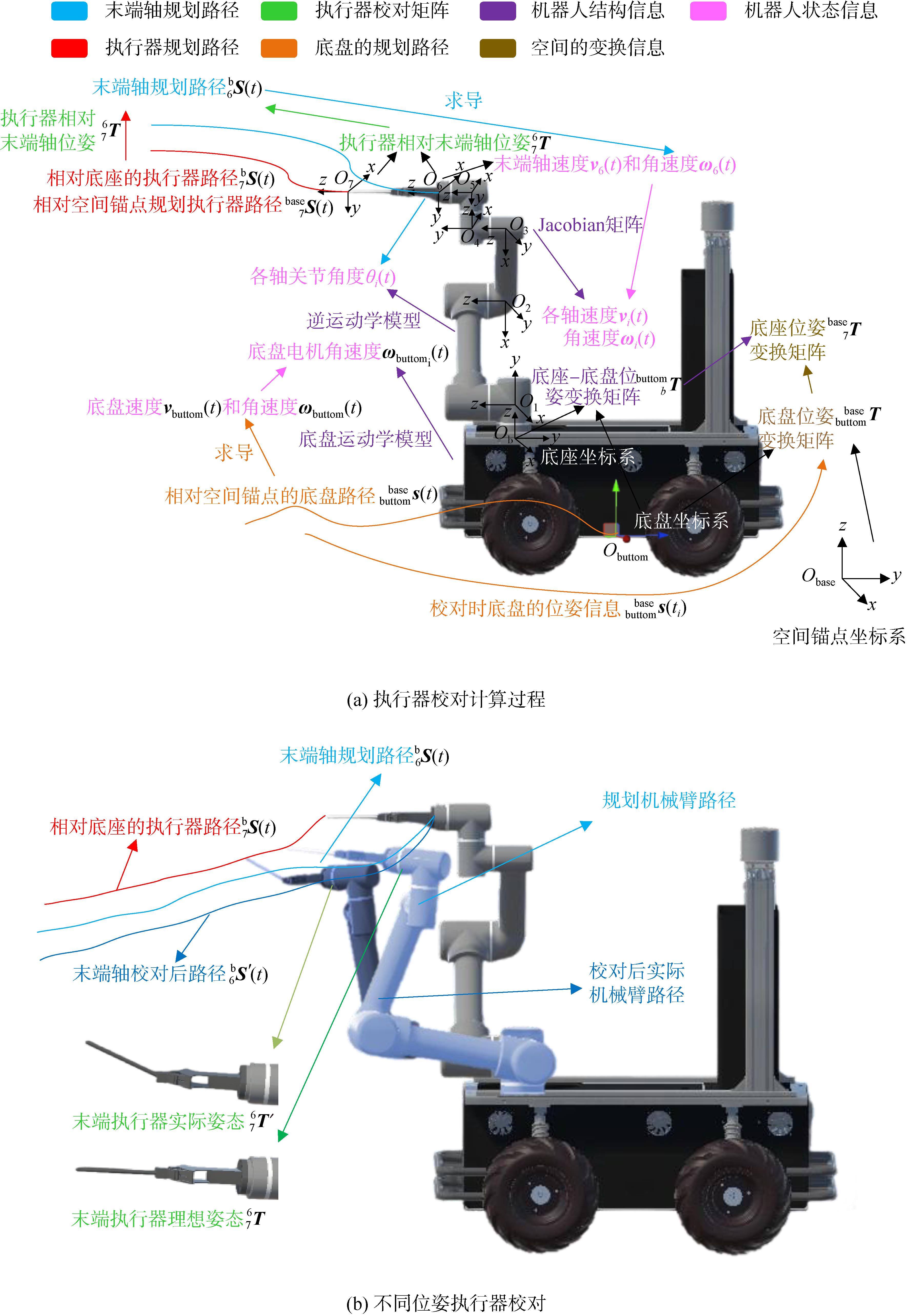
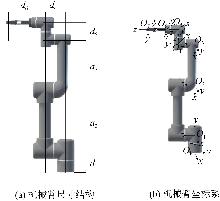
图5
机械臂结构
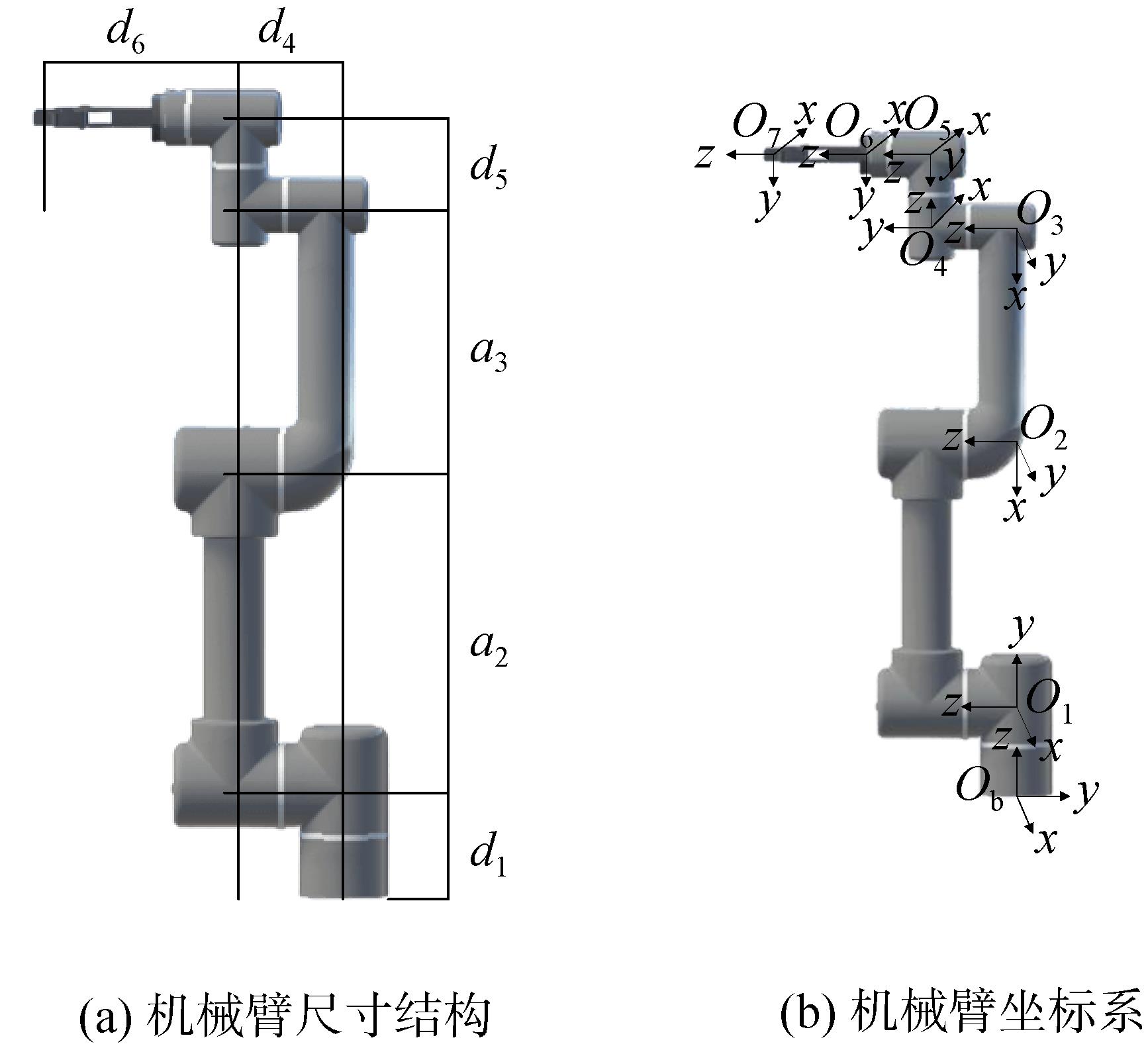
表1
D-H参数表
| 关节轴 | 连杆扭转角α/rad | 连杆长度a/m | 连杆偏距d/m | 关节转角θ/m |
|---|---|---|---|---|
| 关节1 | π/2 | 0 | d1 | θ1 |
| 关节2 | 0 | a2 | 0 | θ2 |
| 关节3 | 0 | a3 | 0 | θ3 |
| 关节4 | π/2 | 0 | d4 | θ4 |
| 关节5 | -π/2 | 0 | d5 | θ5 |
| 关节6 | 0 | 0 | d6 | θ6 |
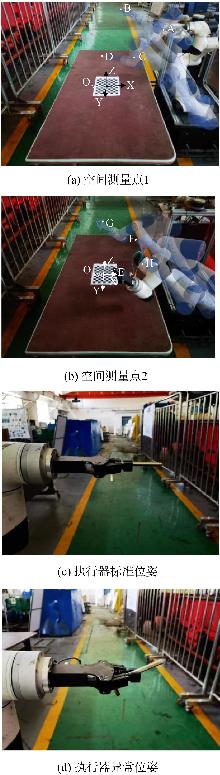
图6
执行器位姿
表2
对照组I测量结果
| 空间点 | 距离/m | 横滚角/(°) | 俯仰角/(°) | 偏航角/(°) |
|---|---|---|---|---|
| A | 0.859 | 127.066 | -88.892 | -127.165 |
| B | 1.038 | -35.107 | -74.522 | 10.927 |
| C | 0.984 | -176.575 | -39.089 | 175.736 |
| D | 0.882 | -108.787 | 85.577 | 36.385 |
| E | 1.005 | -32.998 | 28.935 | 156.788 |
| F | 0.998 | 103.439 | -50.584 | -143.583 |
| G | 0.998 | -49.219 | 29.768 | 120.126 |
| H | 0.888 | 175.980 | 0.360 | -176.807 |
表3
对照组II测量结果
| 空间点 | 距离/m | 横滚角/(°) | 俯仰角/(°) | 偏航角/(°) |
|---|---|---|---|---|
| A | 0.917 | 126.086 | -89.888 | -129.166 |
| B | 1.086 | -34.785 | -76.210 | 12.549 |
| C | 0.943 | -175.060 | -41.629 | 179.203 |
| D | 0.842 | -105.190 | 83.143 | 37.563 |
| E | 0.991 | -29.865 | 28.606 | 165.010 |
| F | 1.020 | 107.291 | -51.019 | -146.762 |
| G | 0.945 | -50.293 | 27.944 | 127.280 |
| H | 0.898 | 181.964 | -0.833 | -175.400 |
表4
实验组测量结果
| 空间点 | 距离/m | 横滚角/(°) | 俯仰角/(°) | 偏航角/(°) |
|---|---|---|---|---|
| A | 0.864 | 127.085 | -88.887 | -127.180 |
| B | 1.050 | -35.101 | -74.516 | 10.926 |
| C | 0.992 | -176.584 | -39.097 | 175.726 |
| D | 0.885 | -108.762 | 85.576 | 36.404 |
| E | 1.007 | -33.008 | 28.953 | 156.797 |
| F | 0.996 | 103.430 | -50.600 | -143.591 |
| G | 1.005 | -49.224 | 29.788 | 120.117 |
| H | 0.902 | 175.988 | 0.360 | -176.788 |
表5
标准组测量结果
| 空间点 | 距离/m | 横滚角/(°) | 俯仰角/(°) | 偏航角/(°) |
|---|---|---|---|---|
| A | 0.850 | 127.079 | -88.882 | -127.172 |
| B | 1.050 | -35.101 | -74.516 | 10.931 |
| C | 0.981 | -176.592 | -39.083 | 175.739 |
| D | 0.891 | -108.769 | 85.576 | 36.392 |
| E | 1.010 | -32.999 | 28.944 | 156.797 |
| F | 1.007 | 103.437 | -50.588 | -143.587 |
| G | 0.996 | -49.226 | 29.781 | 120.109 |
| H | 0.892 | 175.990 | 0.358 | -176.804 |
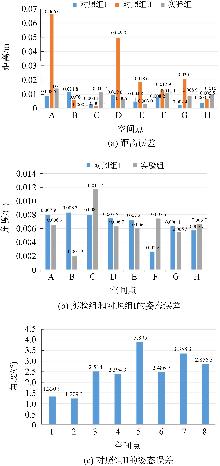
图7
误差分析
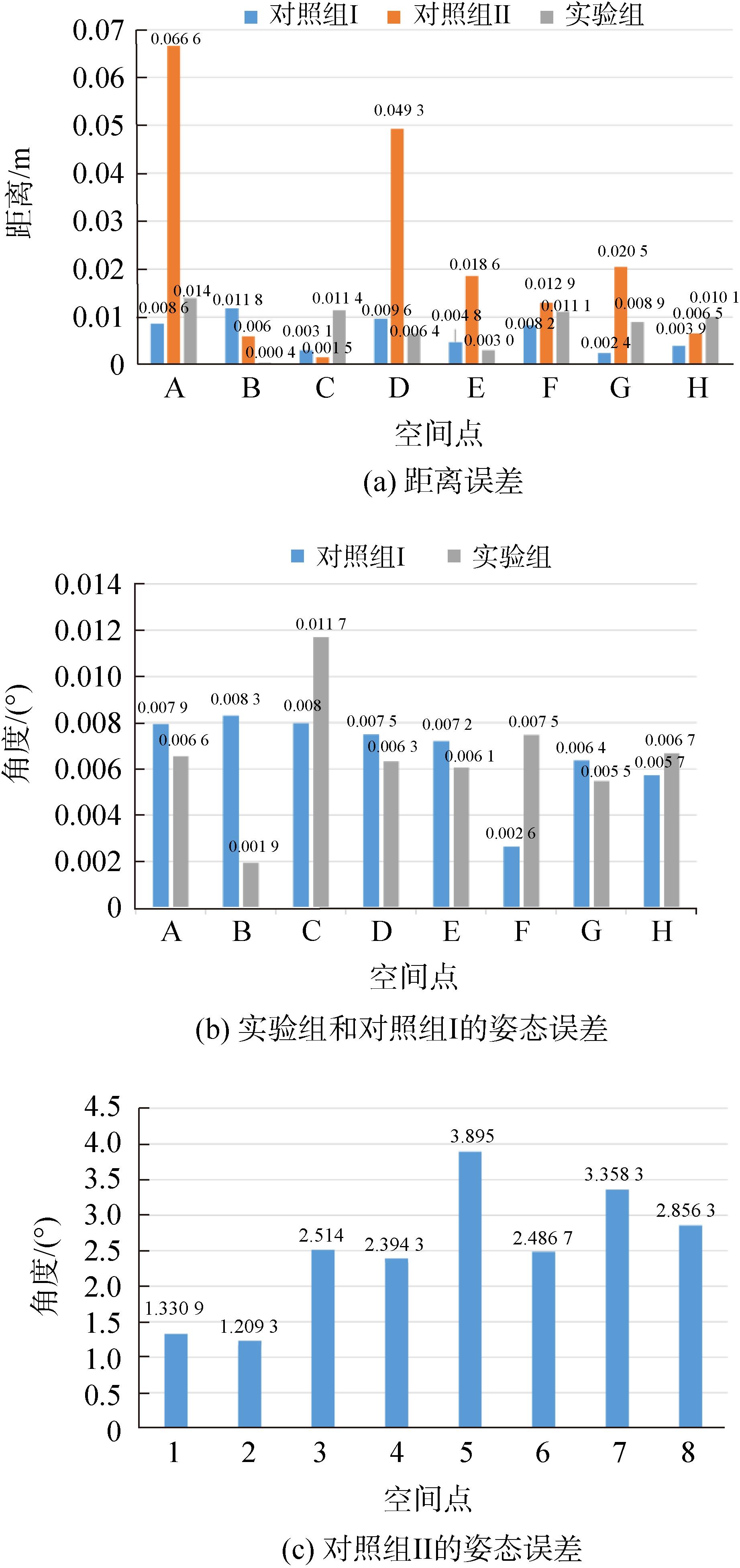
表6
各组均方根误差
| 组别 | 距离均方根误差 | 姿态均方根误差 |
|---|---|---|
| 对照组I | 0.007 3 | 0.006 9 |
| 对照组II | 0.031 4 | 2.647 6 |
| 实验组 | 0.009 2 | 0.007 0 |
表7
Shapiro-Wilk检验p值
| 组别 | 距离误差 | 姿态误差 |
|---|---|---|
| 对照组I | 0.644 4 | 0.865 6 |
| 对照组II | 0.806 5 | 0.634 9 |
| 实验组 | 0.580 5 | 0.213 7 |
表8
t检验p值
| 组别 | 距离误差 | 姿态误差 |
|---|---|---|
| 实验组与对照组I | 0.589 8 | 0.693 5 |
| 实验组与对照组II | 0.007 7 | 0.000 1 |
表9
对照组测量结果
| 空间点 | 距离/m | 横滚角/(°) | 俯仰角/(°) | 偏航角/(°) |
|---|---|---|---|---|
| A | 0.854 | 127.079 | -88.877 | -127.171 |
| B | 1.049 | -35.098 | -74.518 | 10.927 |
| C | 0.983 | -176.600 | -39.069 | 175.743 |
| D | 0.894 | -108.767 | 85.569 | 36.395 |
| E | 1.007 | -33.010 | 28.942 | 156.799 |
| F | 1.010 | 103.436 | -50.589 | -143.592 |
| G | 0.984 | -49.228 | 29.780 | 120.109 |
| H | 0.898 | 175.988 | 0.359 | -176.812 |
表10
实验组测量结果
| 空间点 | 距离/m | 横滚角/(°) | 俯仰角/(°) | 偏航角/(°) |
|---|---|---|---|---|
| A | 0.855 | 127.078 | -88.883 | -127.173 |
| B | 1.054 | -35.094 | -74.511 | 10.937 |
| C | 0.988 | -176.594 | -39.086 | 175.738 |
| D | 0.895 | -108.769 | 85.571 | 36.393 |
| E | 1.010 | -32.999 | 28.950 | 156.800 |
| F | 1.009 | 103.434 | -50.582 | -143.592 |
| G | 0.997 | -49.230 | 29.781 | 120.113 |
| H | 0.888 | 175.981 | 0.363 | -176.797 |
表11
对照组误差
| 空间点 | 距离误差/m | 角度误差/(°) |
|---|---|---|
| A | 0.004 0 | 0.001 9 |
| B | -0.001 4 | 0.003 0 |
| C | 0.001 7 | 0.008 5 |
| D | 0.003 4 | 0.003 9 |
| E | -0.002 9 | 0.005 0 |
| F | 0.002 6 | 0.002 3 |
| G | -0.012 3 | 0.001 2 |
| H | 0.006 3 | 0.003 9 |
表12
实验组误差
| 空间点 | 距离误差/m | 角度误差/(°) |
|---|---|---|
| A | 0.005 2 | 0.000 9 |
| B | 0.004 3 | 0.005 9 |
| C | 0.006 6 | 0.001 9 |
| D | 0.003 9 | 0.002 2 |
| E | -0.000 2 | 0.003 0 |
| F | 0.002 4 | 0.004 7 |
| G | 0.001 1 | 0.002 8 |
| H | -0.003 8 | 0.006 9 |
表13
各组均方根误差
| 组别 | 距离均方根误差 | 姿态均方根误差 |
|---|---|---|
| 对照组 | 0.005 5 | 0.004 3 |
| 实验组 | 0.004 0 | 0.004 0 |
表14
Shapiro-Wilk检验p值
| 组别 | 距离误差 | 姿态误差 |
|---|---|---|
| 对照组 | 0.121 3 | 0.257 1 |
| 实验组 | 0.763 3 | 0.542 6 |
表15
t检验p值
| 组别 | 距离误差 | 姿态误差 |
|---|---|---|
| 实验组与对照组 | 0.369 3 | 0.898 2 |
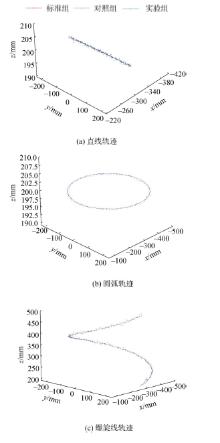
图8
路径轨迹测量结果
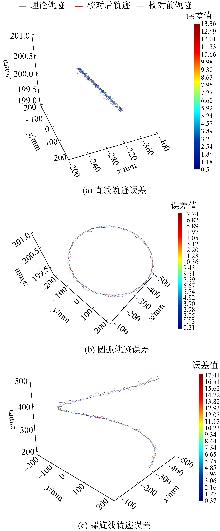
图9
误差热力图
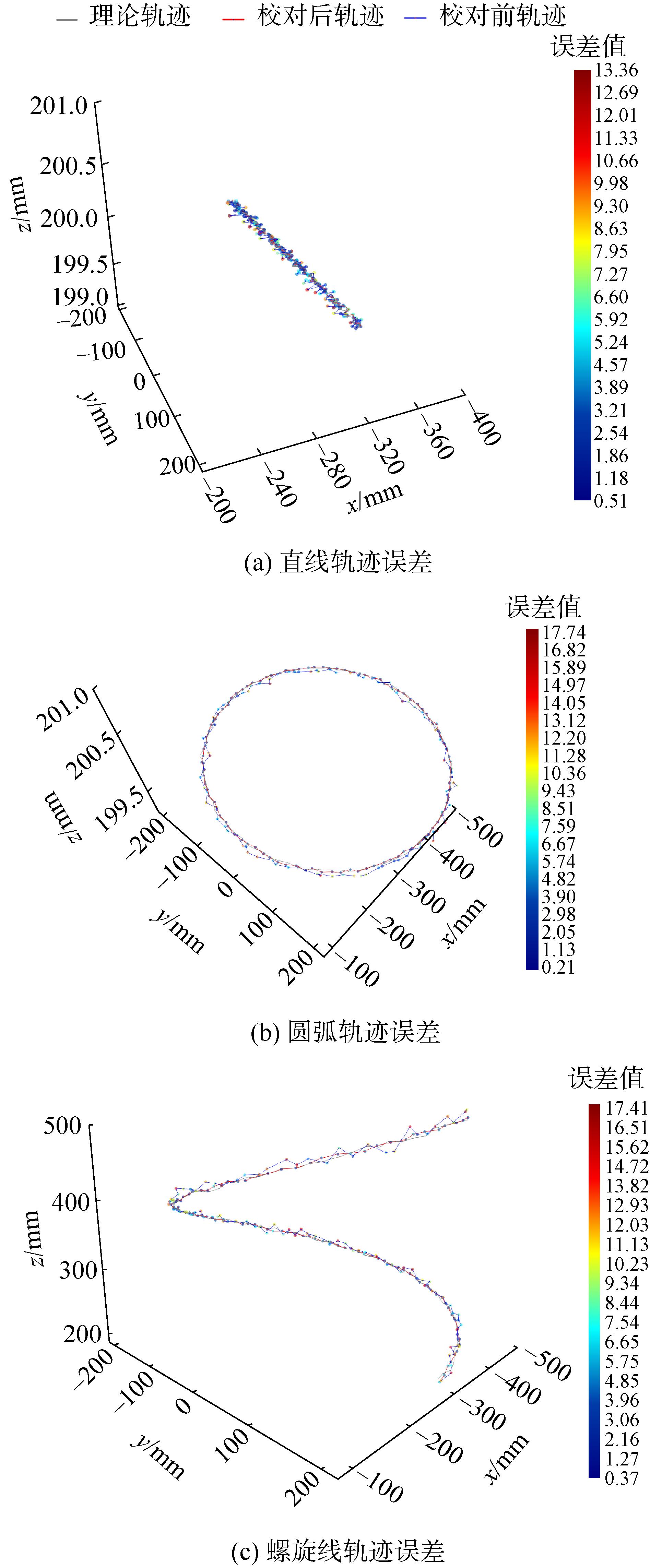
表16
各轨迹的均方根误差
| 指标 | 对照组 | 实验组 |
|---|---|---|
| 直线轨迹/mm | 6.072 6 | 2.204 1 |
| 圆弧轨迹/mm | 8.464 3 | 2.138 0 |
| 螺旋线轨迹/mm | 9.719 1 | 2.352 2 |
表17
各轨迹的最大位置偏差
| 指标 | 对照组 | 实验组 |
|---|---|---|
| 直线轨迹/mm | 14.110 0 | 5.013 4 |
| 圆弧轨迹/mm | 16.336 4 | 4.614 4 |
| 螺旋线轨迹/mm | 16.434 5 | 4.473 9 |
表18
新手组校对所需耗时 (s)
| 组别 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 实验组 | 739 | 1 052 | 842 | 906 | 829 | 832 | 859 | 903 | 948 | 952 |
| 对照组Ⅰ | 2 013 | 2 071 | 2 956 | 2 307 | 2 553 | 2 224 | 2 281 | 2 374 | 2 283 | 2 731 |
| 对照组Ⅱ | 4 503 | 4 493 | 3 863 | 4 313 | 5 509 | 5 377 | 4 611 | 5 888 | 4 133 | 4 341 |
| 对照组Ⅲ | 3 514 | 3 363 | 3 342 | 2 759 | 3 438 | 3 598 | 2 970 | 3 358 | 3 597 | 3 720 |
表19
熟练组校对所需耗时 (s)
| 组别 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 实验组 | 398 | 586 | 561 | 541 | 483 | 503 | 567 | 494 | 463 | 467 |
| 对照组Ⅰ | 1 770 | 1 592 | 1 840 | 1 451 | 2 048 | 1 654 | 2 137 | 1 717 | 1 899 | 2 136 |
| 对照组Ⅱ | 4 619 | 3 350 | 3 350 | 3 381 | 2 854 | 3 156 | 3 201 | 3 576 | 3 841 | 3 146 |
| 对照组Ⅲ | 2 270 | 2 989 | 2 181 | 2 314 | 2 851 | 2 943 | 2 350 | 1 836 | 2 569 | 2 397 |
表20
专家组校对所需耗时 (s)
| 组别 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 实验组 | 443 | 423 | 405 | 432 | 425 | 442 | 497 | 475 | 365 | 372 |
| 对照组Ⅰ | 2 009 | 1 295 | 1 492 | 1 246 | 1 699 | 1 474 | 1 459 | 1 372 | 1 694 | 1 825 |
| 对照组Ⅱ | 2 939 | 2 987 | 3 124 | 2 996 | 3 074 | 3 525 | 3 574 | 3 157 | 2 905 | 2 958 |
| 对照组Ⅲ | 2 046 | 2 032 | 2 498 | 2 344 | 1 796 | 2 521 | 2 105 | 2 105 | 2 457 | 2 042 |
表21
平均耗时 (s)
| 组别 | 新手组 | 熟练组 | 专家组 |
|---|---|---|---|
| 实验组 | 886.2 | 506.3 | 427.9 |
| 对照组Ⅰ | 2 379.3 | 1 824.4 | 1 556.5 |
| 对照组Ⅱ | 4 703.1 | 3 447.4 | 3 123.9 |
| 对照组Ⅲ | 3 365.9 | 2 470.0 | 2 194.6 |
表22
标准差 (s)
| 组别 | 新手组 | 熟练组 | 专家组 |
|---|---|---|---|
| 实验组 | 86.21 | 57.82 | 40.93 |
| 对照组Ⅰ | 291.35 | 232.76 | 243.90 |
| 对照组Ⅱ | 659.49 | 489.45 | 238.46 |
| 对照组Ⅲ | 295.43 | 367.82 | 244.16 |
| [1] | 工业和信息化部, 国家发展改革委, 财政部, 等. 关于印发推动工业领域设备更新实施方案的通知: 工信部联规〔2024〕53号[EB/OL]. (2024-03-27) [2025-05-30]. . |
| [2] | 王巍, 徐磊, 牛孝霞, 等. 摄影测量系统在自动制孔机器人末端执行器位姿调整中的应用[J]. 机械工程师, 2025(4): 1-5, 12. |
| Wang Wei, Xu Lei, Niu Xiaoxia, et al. Application of Industrial Photogrammetric System in Position and Pose Measurement of Automatic Hole Making Robotprocess End Effector[J]. Mechanical Engineer, 2025(4): 1-5, 12. | |
| [3] | Li Zhibin, Li Shuai, Francis A, et al. A Novel Calibration System for Robot Arm via an Open Dataset and a Learning Perspective[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(12): 5169-5173. |
| [4] | 高文斌, 褚亚杰, 余晓流. 一种基于工具坐标系的机器人运动学参数标定方法[J]. 中国机械工程, 2022, 33(18): 2183-2189. |
| Gao Wenbin, Chu Yajie, Yu Xiaoliu. A Kinematic-parameter Calibration Method of Robots Based on Tool Coordinate[J]. China Mechanical Engineering, 2022, 33(18): 2183-2189. | |
| [5] | 梁亮, 吴成东, 刘世昌. 基于关节几何误差的机器人绝对位置精度标定算法[J]. 东北大学学报(自然科学版), 2025, 46(4): 1-7. |
| Liang Liang, Wu Chengdong, Liu Shichang. Absolute Position Accuracy Calibration Algorithm for Robots Based on Joint Geometric Error[J]. Journal of Northeastern University(Natural Science), 2025, 46(4): 1-7. | |
| [6] | Li Xirui, Zhang Enzheng, Fang Xiujun, et al. Calibration Method for Industrial Robots Based on the Principle of Perigon Error Close[J]. IEEE Access, 2022, 10: 48569-48576. |
| [7] | 王东霞, 唐颖, 李国成, 等. 机器人几何参数标定误差模型对定位精度影响研究[J]. 计量学报, 2024, 45(8): 1108-1114. |
| Wang Dongxia, Tang Ying, Li Guocheng, et al. Research on the Influence of Robot Geometric Parameter Calibration Error Model on Positioning Accuracy[J]. Acta Metrologica Sinica, 2024, 45(8): 1108-1114. | |
| [8] | Li Zhibin, Li Shuai, Luo Xin. An Overview of Calibration Technology of Industrial Robots[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(1): 23-36. |
| [9] | Wu Wei, Liu Chang, Cao Wenhan, et al. Multi-sensor Calibration System for Mobile Robots[C]//2023 7th CAA International Conference on Vehicular Control and Intelligence (CVCI). Piscataway: IEEE, 2023: 1-7. |
| [10] | Mao Jincheng, Xu Ruidi, Ma Xiaojie, et al. Fast Calibration Method for Base Coordinates of the Dual-robot Based on Three-point Measurement Calibration Method[J]. Applied Sciences, 2023, 13(15): 8799. |
| [11] | Wang Ziyi, Liu Yang, Wang Xinyue, et al. Field Calibration Method for Industrial Robots Based on Single Position Sensitive Device[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 1-12. |
| [12] | Nguyen Hoai-Nhan, Le Phu-Nguyen, Kang Hee-Jun. A Performance Comparison of the Full Pose-based and Partial Pose-based Robot Calibration for Various Types of Robot Manipulators[J]. Advances in Mechanical Engineering, 2021, 2021(9): 168781402110477. |
| [13] | 于振, 万俊贺, 刘海林, 等. 基于IGCF算法和CSF-PPSO-ESN算法的工业机器人末端执行器位姿重复性检测[J]. 仪器仪表学报, 2023, 44(6): 43-53. |
| Yu Zhen, Wan Junhe, Liu Hailin, et al. Industrial Robot End Effector Pose Repeatability Test Based on IGCF and CSF-PPSO-ESN Algorithm[J]. Chinese Journal of Scientific Instrument, 2023, 44(6): 43-53. | |
| [14] | 王逸峰, 逯永康, 李俊卿, 等. 基于摄影测量的移动机器人末端标定方法研究[J]. 航空制造技术, 2022, 65(18): 92-97. |
| Wang Yifeng, Lu Yongkang, Li Junqing, et al. Research on End Calibration Method of Mobile Robot Based on Photogrammetry[J]. Aeronautical Manufacturing Technology, 2022, 65(18): 92-97. | |
| [15] | 高文斌, 杜涛, 罗瑞卿. 一种利用位置误差模型的机器人位姿标定方法[J]. 机械科学与技术, 2023, 42(11): 1852-1859. |
| Gao Wenbin, Du Tao, Luo Ruiqing. A Robot Pose Calibration Method Using Position Error Model[J]. Mechanical Science and Technology for Aerospace Engineering, 2023, 42(11): 1852-1859. | |
| [16] | 高国琴, 韩滢. 改进PROSAC算法的并联机器人末端位姿检测方法[J]. 计算机应用与软件, 2022, 39(4): 205-212, 262. |
| Gao Guoqin, Han Ying. Pose Detection for Parallel Robot Based on Improved PROSAC Algorithm[J]. Computer Applications and Software, 2022, 39(4): 205-212, 262. | |
| [17] | Zhang Qi, Tian Wei, Hu Junshan, et al. Robot Hand-eye Calibration Method Based on Intermediate Measurement System[C]//Intelligent Robotics and Applications. Cham: Springer International Publishing, 2021: 37-47. |
| [18] | Kuo Yong-Lin, Hsieh Chia-Hang. Static Calibration and Dynamic Compensation of the SCORBOT Robot Using Sensor Fusion and LSTM Networks[J]. Journal of the Chinese Institute of Engineers, 2023, 46(8): 881-894. |
| [19] | 李明, 徐群, 王艳, 等. 基于自适应动态规划机械臂运动策略仿真研究[J]. 系统仿真学报, 2023, 35(10): 2182-2192. |
| Li Ming, Xu Qun, Wang Yan, et al. Simulation and Research of Manipulator Motion Strategy Based on Adaptive Dynamic Programming[J]. Journal of System Simulation, 2023, 35(10): 2182-2192. | |
| [20] | 尤波, 王明睿, 李智, 等. 基于模型预测控制的轮式移动机器人轨迹规划[J]. 系统仿真学报, 2020, 32(4): 591-600. |
| You Bo, Wang Mingrui, Li Zhi, et al. Trajectory Planning of Wheeled Mobile Robot Based on Model Predictive Control[J]. Journal of System Simulation, 2020, 32(4): 591-600. | |
| [21] | 李敏, 张森, 曾祥光, 等. 基于深度强化学习的四足机器人单腿越障轨迹规划[J]. 系统仿真学报, 2025, 37(4): 895-909. |
| Li Min, Zhang Sen, Zeng Xiangguang, et al. Trajectory Planning of Quadruped Robot over Obstacle with Single Leg Based on Deep Reinforcement Learning[J]. Journal of System Simulation, 2025, 37(4): 895-909. | |
| [22] | 张茜, 王平. 激光传感自适应的装配式建筑机器人轨迹规划[J]. 光学技术, 2024, 50(5): 598-605. |
| Zhang Qian, Wang Ping. Trajectory Planning of Prefabricated Building Robot Based on Laser Sensing Adaptive Method[J]. Optical Technique, 2024, 50(5): 598-605. | |
| [23] | 彭海兵, 赵亚东. 考虑能耗的煤矿井下水仓清挖机器人轨迹规划方法[J]. 工矿自动化, 2022, 48(增2): 130-134. |
| Peng Haibing, Zhao Yadong. Trajectory Planning Method of Underground Mine Sump Cleaning Robot Considering Energy Consumption[J]. Journal of Mine Automation, 2022, 48(S2): 130-134. | |
| [24] | 姚江云, 王宽田. 基于膜计算的搬运机器人轨迹规划和模型预测控制[J]. 现代制造工程, 2024(10): 82-89. |
| Yao Jiangyun, Wang Kuantian. Trajectory Planning of Handling Robots Based on Membrane Computing and Model Prediction Control[J]. Modern Manufacturing Engineering, 2024(10): 82-89. | |
| [25] | 王学文, 刘曙光, 王雪松, 等. 面向多人-多机复杂协作任务的煤矿XR智能运维系统[J]. 煤炭学报, 2024, 49(4): 2124-2140. |
| Wang Xuewen, Liu Shuguang, Wang Xuesong, et al. Research on Coal Mine XR Intelligent Operation and Maintenance System for Complex Collaborative Tasks Involving Multiple Humans and Multiple Robots[J]. Journal of China Coal Society, 2024, 49(4): 2124-2140. | |
| [26] | 陈赛旋. 协作机器人零力控制与碰撞检测技术研究[D]. 合肥: 中国科学技术大学, 2018. |
| Chen Saixuan. Research on the Technology of Zero Moment Control and Collision Detection of Collaborative Robot[D]. Hefei: University of Science and Technology of China, 2018. | |
| [27] | 周扬. 基于UR5机械臂在线受力误差补偿系统的研究与实现[D]. 沈阳: 沈阳工业大学, 2024. |
| Zhou Yang. Research and Implementation of an Online Force Error Compensation System Based on UR5 Robotic Arm[D]. Shenyang: Shenyang University of Technology, 2024. |
| [1] | 张定坤, 梁海朝. 基于动态走廊膨胀与凸优化的移动机器人分层运动规划[J]. 系统仿真学报, 2026, 38(5): 1383-1407. |
| [2] | 南焱栋, 朱金达, 路鑫彬, 秦志英, 齐丹丹, 丁智恒. 数字孪生驱动的核电连接套质检设备状态监测[J]. 系统仿真学报, 2026, 38(4): 1004-1017. |
| [3] | 严冬, 杨瀚哲, 姜方方, 刘成保, 张鹏. 卫星星座飞行任务协同仿真系统设计与应用[J]. 系统仿真学报, 2026, 38(4): 1067-1079. |
| [4] | 王雪倩, 门建兵, 周鑫, 王树有, 李梅. 杀爆战斗部对四足机器人的精准毁伤评估方法[J]. 系统仿真学报, 2026, 38(3): 702-713. |
| [5] | 王子赢, 孙丛君, 李桂虎, 张添昊. 基于数字孪生的列车虚拟运行平台[J]. 系统仿真学报, 2026, 38(3): 736-745. |
| [6] | 周家锐, 崔海华, 李鹏程, 顾施濠, 郝惠朴, 赵西富, 赵安安, 姜涛. 基于改进RBOT的增强现实三维跟踪注册方法[J]. 系统仿真学报, 2026, 38(1): 14-28. |
| [7] | 陆后军, 朱益飞, 荣延平, 张汪荟. 基于激光雷达的散货堆场数字孪生建模方法[J]. 系统仿真学报, 2025, 37(9): 2269-2286. |
| [8] | 倪培龙, 毛鹏军, 王宁, 杨孟杰. 基于改进A-DDQN算法的机器人路径规划[J]. 系统仿真学报, 2025, 37(9): 2420-2430. |
| [9] | 张凯翔, 毛剑琳, 王妮娅, 徐志昊. 针对路径干扰的多机器人分层协作k鲁棒路径规划[J]. 系统仿真学报, 2025, 37(8): 2074-2088. |
| [10] | 江好胜, 武芳芳, 黄泽贤, 马子玥, 董春云, 平续斌. 动态障碍物环境下多四旋翼轨迹规划与跟踪[J]. 系统仿真学报, 2025, 37(8): 2089-2102. |
| [11] | 刘永奎, 杨康, 脱奔奔, 潘亚铎, 王欣宇, 王一涵, 龚永乾, 张霖, 王力翚, 林廷宇, 訾斌, 李元, 游玮, 徐旬. 数字孪生工业机器人:概念框架、关键技术与案例研究[J]. 系统仿真学报, 2025, 37(7): 1723-1752. |
| [12] | 刘涛, 李瀚熙, 尹勇, 刘佳仑. 航海智能仿真技术及应用研究综述[J]. 系统仿真学报, 2025, 37(7): 1684-1709. |
| [13] | 陈清华, 梁作友, 关维娟, 季家东, 刘萍. 高低温试验箱数字孪生系统构建方法[J]. 系统仿真学报, 2025, 37(6): 1400-1411. |
| [14] | 叶晨, 邵鹏, 张少平, 李文婷, 周腾明. 面向移动机器人路径规划的增强型人工大猩猩算法[J]. 系统仿真学报, 2025, 37(6): 1474-1485. |
| [15] | 程翀, 王理厦, 段松涛, 熊晓光, 葛贤军. 基于时空网络的变电站机器人视觉避障研究[J]. 系统仿真学报, 2025, 37(6): 1522-1530. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
