

系统仿真学报 ›› 2026, Vol. 38 ›› Issue (3): 785-799.doi: 10.16182/j.issn1004731x.joss.25-0577
方浩杰1, 甄子洋1, 龚华军1, 谢序2,3, 罗伟1,4
收稿日期:2025-06-19
修回日期:2025-09-07
出版日期:2026-03-18
发布日期:2026-03-27
通讯作者:
甄子洋
第一作者简介:方浩杰(2001-),男,硕士生,研究方向为无人系统任务规划。
基金资助:Fang Haojie1, Zhen Ziyang1, Gong Huajun1, Xie Xu2,3, Luo Wei1,4
Received:2025-06-19
Revised:2025-09-07
Online:2026-03-18
Published:2026-03-27
Contact:
Zhen Ziyang
摘要:
在跨域协同作战战前任务规划中,针对无人系统性能差异与作战任务协同要求提升所带来的约束条件多样复杂、规划模型求解困难的问题,提出了一种多策略增强灰狼优化算法(multi-strategy enhanced GWO,MSEGWO)。考虑各型无人系统的性能、弹药使用、任务时序、任务时间窗、航路等多种复杂约束条件,建立了以最小化综合代价为目标的任务规划数学模型;设计了收敛因子非线性调整、备选解空间映射、任务时序修复、增强搜索等改进策略,以增强算法的寻优能力。仿真验证结果表明:所提算法能够有效求解复杂约束条件下无人系统跨域协同作战任务规划问题,且能够适应不同规模和不同复杂度的问题场景。
中图分类号:
方浩杰,甄子洋,龚华军等 . 复杂约束条件下无人系统跨域协同作战任务规划方法[J]. 系统仿真学报, 2026, 38(3): 785-799.
Fang Haojie,Zhen Ziyang,Gong Huajun,et al . Task Planning Method for Cross-domain Cooperative Combat Operations of Unmanned Systems Under Complex Constraints[J]. Journal of System Simulation, 2026, 38(3): 785-799.

图1
无人系统跨域协同作战概念图
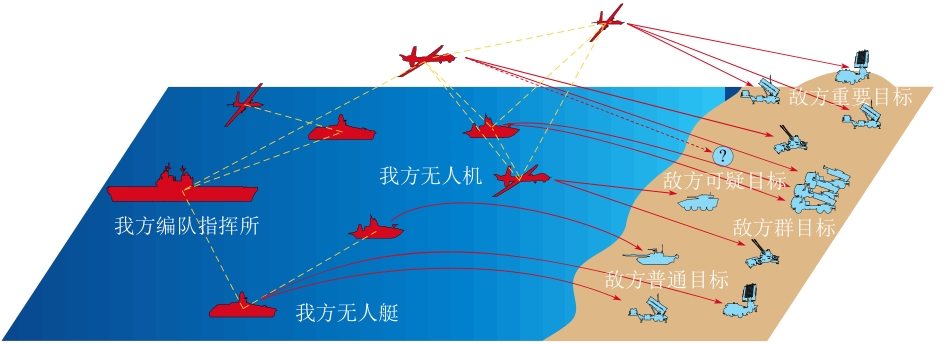

图2
含有时序约束的任务序列有向图
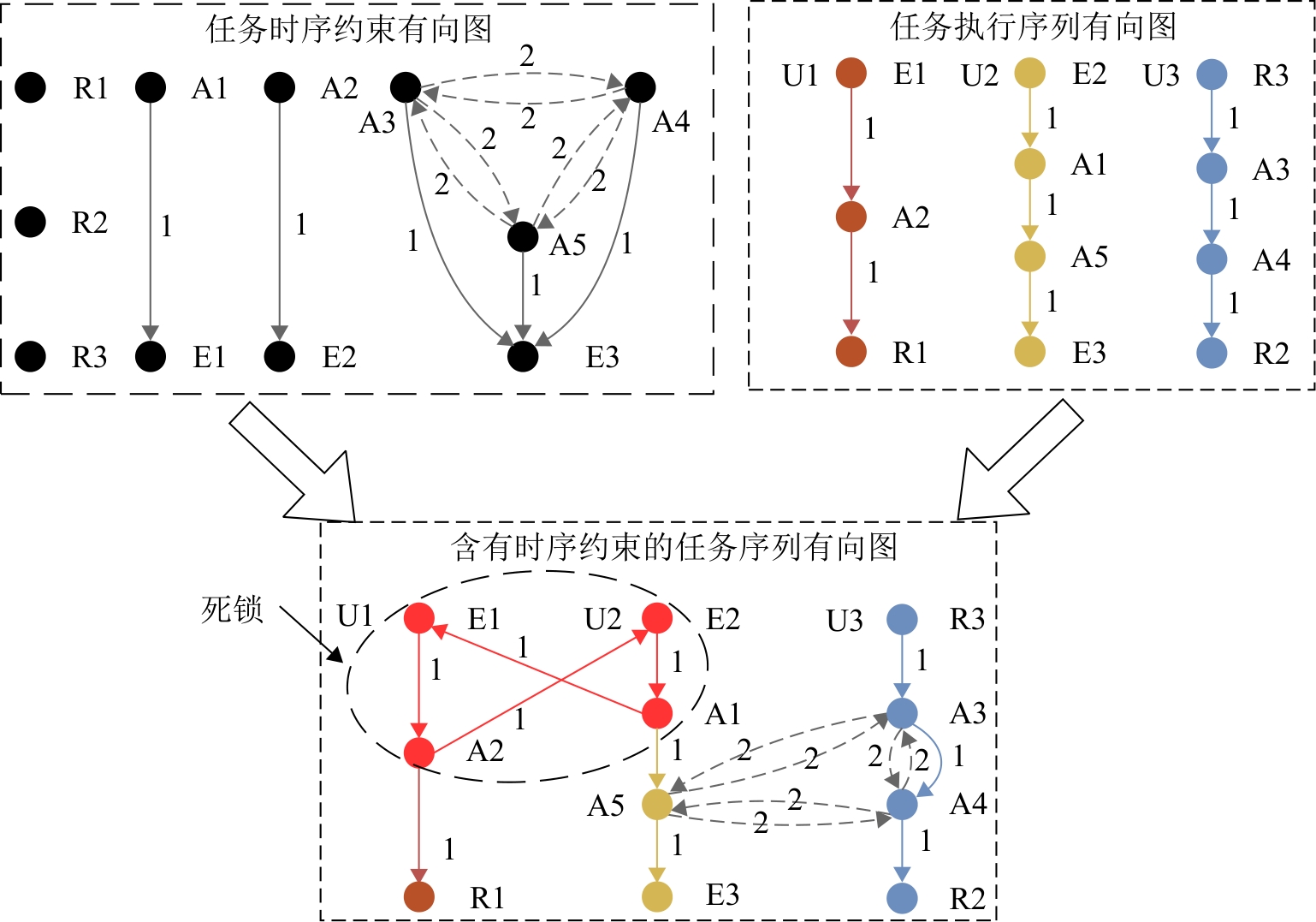
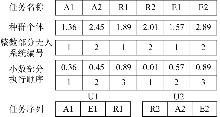
图3
种群编码规则
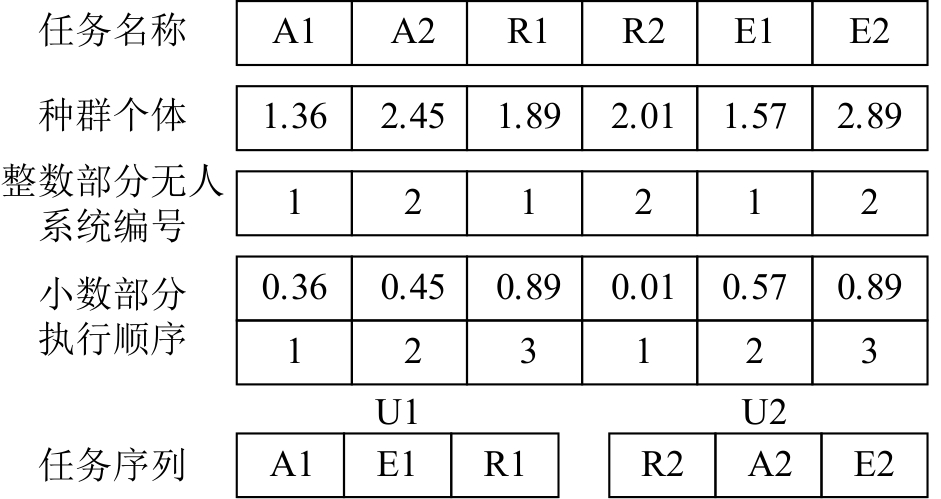
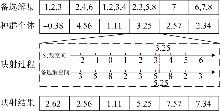
图4
备选解空间映射
表1
各型无人系统性能参数
| 类型 | 最小速度/(m/s) | 巡航速度/(m/s) | 最大速度/(m/s) | 巡航高度/m | 最小转弯半径/m | 最大航程/km | 出动成本 | 有效探测半径/m | 弹药配置 |
|---|---|---|---|---|---|---|---|---|---|
| UAV_A | 30 | 75 | 100 | 5 000 | 600 | 500 | 5 000 | 3 711.5 | WP_A×4, WP_B×2 |
| UAV_B | 25 | 63 | 90 | 5 000 | 500 | 300 | 4 000 | 3 711.5 | WP_B×6 |
| USV_L | 3 | 15.4 | 22 | 0 | 100 | 600 | 3 000 | 10 456 | WP_C×4, WP_D×4 |
| USV_S | 3 | 19.6 | 22 | 0 | 50 | 400 | 1 500 | 10 456 | WP_D×6 |
表2
各型弹药性能参数
| 类型 | 平均速度/(m/s) | 最大射程/km | 最小射程/km | 毁伤能力 | 使用成本 |
|---|---|---|---|---|---|
| WP_A | 374 | 8 | 2 | 120 | 1×105 |
| WP_B | 205 | 8 | 2 | 80 | 3×104 |
| WP_C | 374 | 25 | 2 | 150 | 1.5×105 |
| WP_D | 274 | 15 | 3 | 120 | 1×105 |
表3
无人系统配置参数
| 序号 | 类型 | 初始位置/km |
|---|---|---|
| 1 | UAV_A | (5,3,5) |
| 2 | UAV_A | (5,2.5,5) |
| 3 | UAV_B | (5,35,5) |
| 4 | UAV_B | (5,2,5) |
| 5 | USV_L | (30,35,0) |
| 6 | USV_L | (30,25,0) |
| 7 | USV_S | (17.5,20,0) |
| 8 | USV_S | (17.5,40,0) |
表4
目标配置参数
| 目标ID | 位置/m | 类型 | 生命值 |
|---|---|---|---|
| T1 | (73 685.3, 29 748.3, 13.0) | 1 | 0 |
| T2 | (79 723.4, 28 629.4, 90.9) | 1 | 0 |
| T3 | (82 334.3, 43 567.0, 46.8) | 2 | 50 |
| T4 | (63 602.1, 22 435.4, 13.2) | 2 | 100 |
| T5 | (75 662.9, 30 985.4, 37.8) | 3 | 90 |
| T6 | (75 697.5, 31 018.3, 37.9) | 3 | 30 |
| T7 | (75 708.5, 31 064.1, 39.1) | 3 | 50 |
| T8 | (75 721.8, 31 109.3, 40.4) | 3 | 100 |
| T9 | (75 756.9, 31 132.0, 40.7) | 3 | 50 |
| T10 | (68 967.0, 10 919.3, 171.9) | 4 | 30 |
| T11 | (66 932.8, 25 451.9, 19.6) | 4 | 30 |
| T12 | (80 036.3, 39 806.9, 204.2) | 4 | 50 |
表5
任务列表
| 任务ID | 目标ID | 时间窗/s | 协同打击批次 |
|---|---|---|---|
| R1 | T1 | 0 | |
| R2 | T2 | (0, 3 474] | 0 |
| A1 | T3 | [3 491, 4 687] | 0 |
| E1 | T3 | [3 491, 4 687] | 0 |
| A2 | T4 | 0 | |
| E2 | T4 | 0 | |
| A3 | T5 | [2 448, 3 940] | 1 |
| A4 | T6 | [2 448, 3 940] | 1 |
| A5 | T7 | [2 448, 3 940] | 1 |
| A6 | T8 | [2 448, 3 940] | 1 |
| A7 | T9 | [2 448, 3 940] | 1 |
| E3 | T5~T9 | [2 448, 3 940] | 0 |
| A8 | T10 | (0, 3 805] | 2 |
| E4 | T10 | (0, 3 805] | 0 |
| A9 | T11 | (0, 3 550] | 2 |
| E5 | T11 | (0, 3 550] | 0 |
| A10 | T12 | (0, 3 729] | 2 |
| E6 | T12 | (0, 3 729] | 0 |
表6
无人系统任务信息
| 无人系统 | 执行序列 | 出发时间/s | 总用时/s | 总航程/m |
|---|---|---|---|---|
| U3 | A5→A7→A4→A10→E3→A1 | 1 545.5 | 4 646.7 | 166 584.2 |
| U4 | A8→E4→E2 | 1 789.3 | 3 823.5 | 128 155.6 |
| U5 | R2→A9→E5→E6→E1→R1 | 0 | 6 409.8 | 90 349.8 |
| U6 | A2 | 0 | 2 449.0 | 37 713.9 |
| U7 | A6→A3 | 0 | 5 078.6 | 89 383.8 |
表7
任务规划信息
| 无人系统 | 任务ID | 执行点位置/m | 执行点航向/(°) | 弹药 | 执行时间/s | 打击命中时间/s | 等待时间/s | 累计航程/m |
|---|---|---|---|---|---|---|---|---|
| U3 | A5 | (677 21.9, 31 506.7, 5 000.0) | 356.8 | WP_B | 2 542.6 | 2 588.5 | 0 | 62 819.1 |
| A7 | (67 847.7, 31 499.7, 5 000.0) | 356.8 | WP_B | 2 544.6 | 2 590.0 | 0 | 62 945.1 | |
| A4 | (67 973.5, 31 492.7, 5 000.0) | 356.8 | WP_B | 2 546.6 | 2 591.5 | 0 | 63 071.1 | |
| A10 | (73 402.5, 35 335.6, 5 000.0) | 34.0 | WP_B | 2 687.9 | 2 733.4 | 0 | 69 744.9 | |
| E3 | (73 946.5, 34 327.9, 5 000.0) | 298.36 | — | 2 740.7 | — | 0 | 73 066.2 | |
| A1 | (76 956.9, 37 643.9, 5 000.0) | 47.8 | WP_B | 3 491.0 | 3 536.9 | 569.2 | 93 772.5 | |
| U4 | A8 | (61 046.4, 12 043.7, 5 000.0) | 351.9 | WP_B | 2 687.9 | 2 733.4 | 0 | 56 608.3 |
| E4 | (65 292.3, 11 441.0, 5 000.0) | 351.9 | — | 2 755.9 | — | 0 | 60 896.8 | |
| E2 | (64 166.0, 18 766.9, 5 000.0) | 98.7 | — | 2 881.0 | — | 0 | 68 778.8 | |
| U5 | R2 | (71 500.0, 35 000.0, 0.0) | 0.0 | — | 2 694.8 | — | 0 | 41 500.0 |
| A9 | (71 500.0, 35 000.0, 0.0) | 0.0 | WP_D | 2 694.8 | 2 733.4 | 0 | 41 500.0 | |
| E5 | (71 444.7, 34 884.4, 0.0) | 244.4 | — | 2 740.0 | — | 0 | 42 196.4 | |
| E6 | (71 444.7, 34 884.4, 0.0) | 244.4 | — | 2 740.0 | — | 0 | 42 196.4 | |
| E1 | (74 000.0, 37 500.0, 0.0) | 45.7 | — | 3 536.9 | — | 0 | 46 106.5 | |
| R1 | (74 000.0, 37 500.0, 0.0) | 45.7 | — | 3 536.9 | — | 0 | 46 106.5 | |
| U6 | A2 | (48 645.6, 23 576.9, 0.0) | 355.6 | WP_D | 1 214.3 | 1 269.0 | 0 | 18 699.8 |
| U7 | A6 | (60 709.6, 31 000.9, 0.0) | 0.2 | WP_D | 2 533.8 | 2 588.5 | 0 | 44 594.3 |
| A3 | (60 744.8, 31 001.0, 0.0) | 0.2 | WP_D | 2 535.8 | 2 590.4 | 0 | 44 629.5 |
Fig. 5
无人系统任务航路
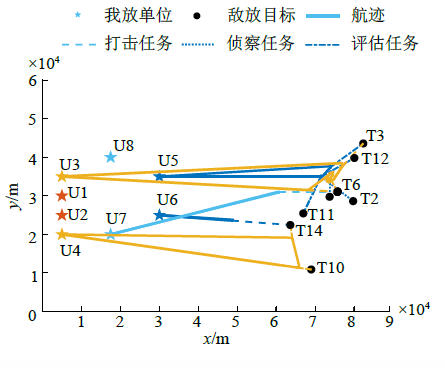
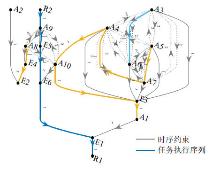
Fig. 6
带有时序约束的任务序列有向图
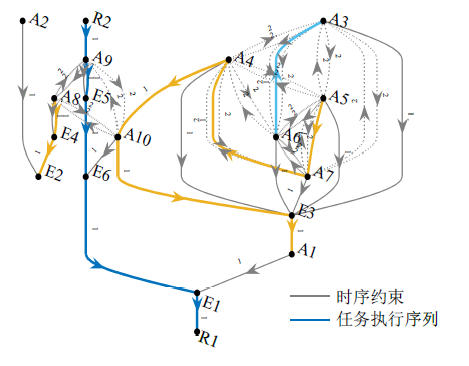

图7
任务执行时刻图
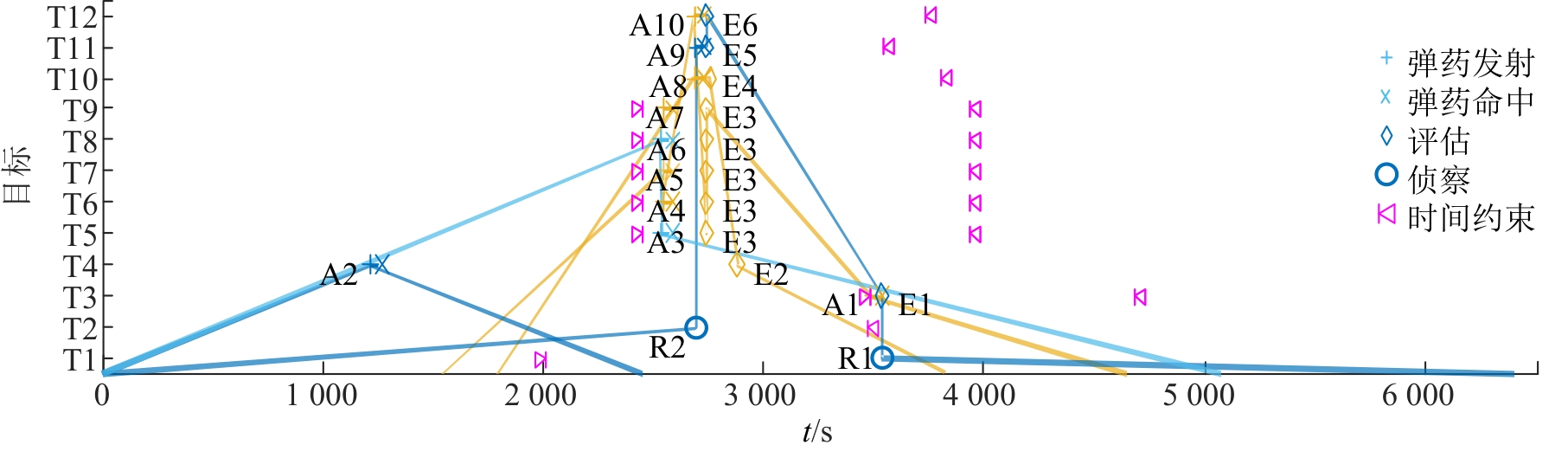
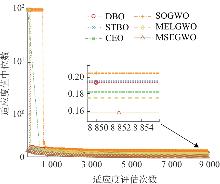
图8
各算法迭代曲线
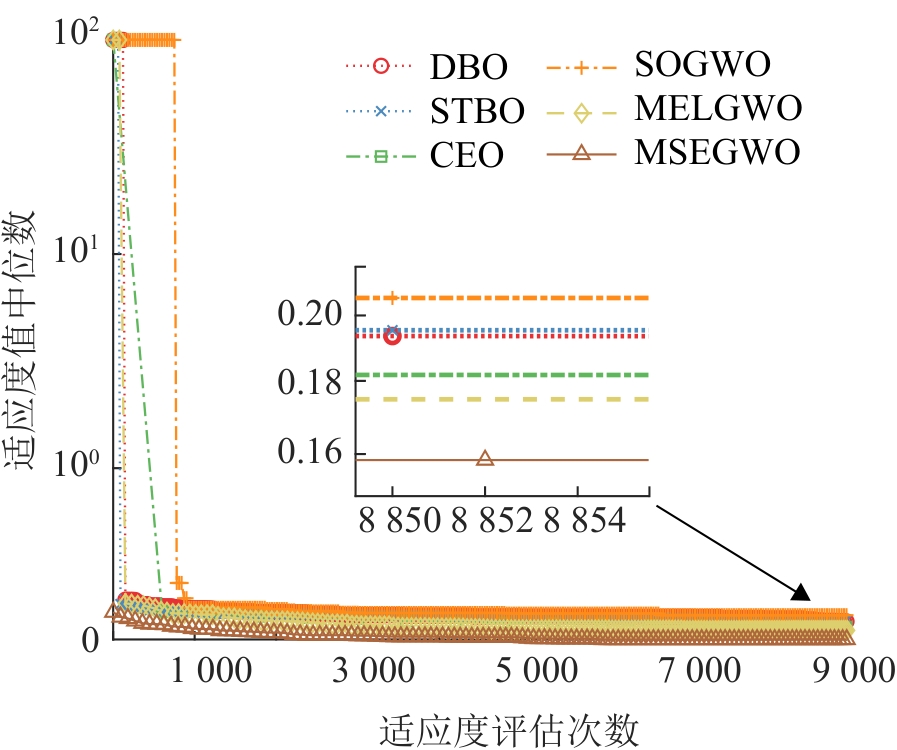
表8
各算法求解结果统计数据
| 算法名称 | 适应度最小值 | 适应度最大值 | 适应度中位数 | 求解成功率 |
|---|---|---|---|---|
| DBO | 0.173 | 0.211 | 0.192 | 1 |
| STBO | 0.178 | 0.209 | 0.195 | 1 |
| CEO | 0.169 | 0.190 | 0.181 | 1 |
| SOGWO | 0.162 | 100 | 0.206 | 0.7 |
| MELGWO | 0.147 | 0.195 | 0.175 | 1 |
| MSEGWO | 0.146 | 0.181 | 0.158 | 1 |
图9
不同目标数量情况下各算法结果
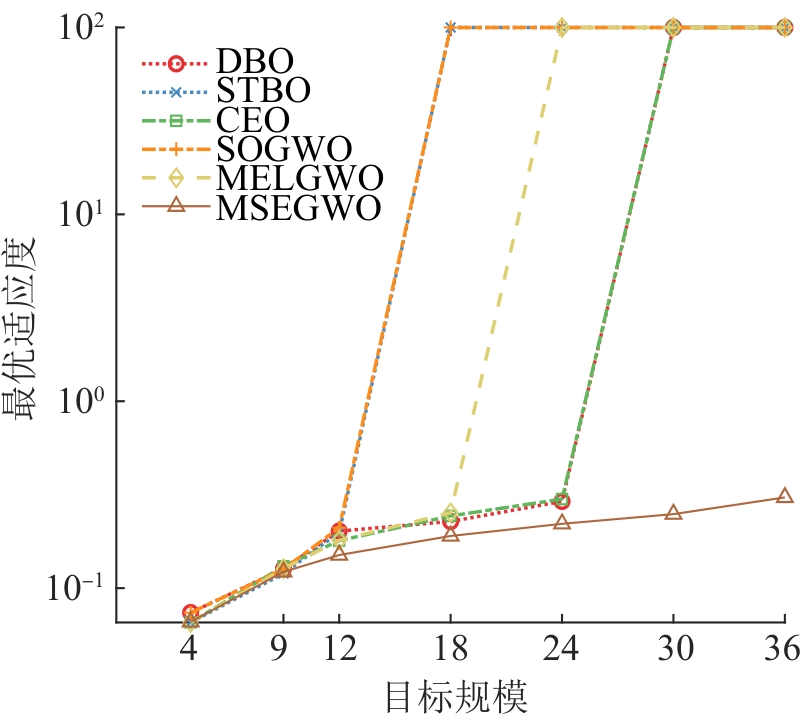
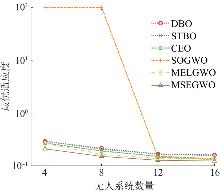
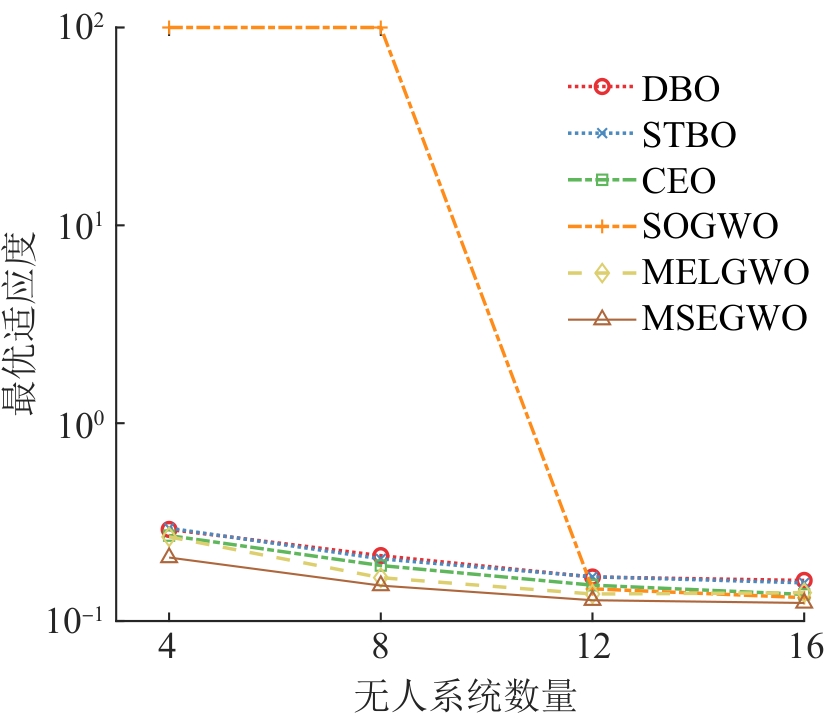
图10
不同无人系统数量情况下各算法结果对比图
| [1] | 王耀南, 安果维, 王传成, 等. 智能无人系统技术应用与发展趋势[J]. 中国舰船研究, 2022, 17(5): 9-26. |
| Wang Yaonan, An Guowei, Wang Chuancheng, et al. Technology Application and Development Trend of Intelligent Unmanned System[J]. Chinese Journal of Ship Research, 2022, 17(5): 9-26. | |
| [2] | 邱志明, 孟祥尧, 马焱, 等. 海上无人系统发展及关键技术研究[J]. 中国工程科学, 2023, 25(3): 74-83. |
| Qiu Zhiming, Meng Xiangyao, Ma Yan, et al. Development and Key Technologies of Maritime Unmanned Systems[J]. Strategic Study of CAE, 2023, 25(3): 74-83. | |
| [3] | 梁晓龙, 王宁, 王维佳, 等. 海上跨域无人集群研究进展综述[J]. 空军工程大学学报, 2023, 24(5): 1-15. |
| Liang Xiaolong, Wang Ning, Wang Weijia, et al. Progress in Maritime Cross-domain Manned Swarms[J]. Journal of Air Force Engineering University, 2023, 24(5): 1-15. | |
| [4] | 军事科学院. 中国人民解放军军语[M]. 北京: 军事科学出版社, 2011. |
| Academy of Military Sciences. Military Language of the People's Liberation Army of Chinese[M]. Beijing: Military Science Press, 2011. | |
| [5] | 张修社, 石静, 范文新. 协同作战系统工程导论[M]. 北京: 国防工业出版社, 2019. |
| Zhang Xiushe, Shi Jing, Fan Wenxin. Introduction to Cooperative Engagement System Engineering[M]. Beijing: National Defense Industry Press, 2019. | |
| [6] | 李明哲, 马琼敏, 伍国华. 基于强化学习的无人机集群动态任务规划算法[J]. 系统仿真技术, 2023, 19(3): 193-204. |
| Li Mingzhe, Ma Qiongmin, Wu Guohua. Dynamic Task Planning Algorithm for UAV Swarm Based on Reinforcement Learning[J]. System Simulation Technology, 2023, 19(3): 193-204. | |
| [7] | 张栋, 李林, 王孟阳, 等. 不确定环境下多无人机察打一体任务规划方法[J]. 北京理工大学学报, 2025, 45(2): 111-125. |
| Zhang Dong, Li Lin, Wang Mengyang, et al. Methodology for Integrated Reconnaissance-strike Mission Planning of Multi-UAV Under Uncertain Environments[J]. Transactions of Beijing Institute of Technology, 2025, 45(2): 111-125. | |
| [8] | 陈超. 无人集群任务分配方法研究[D]. 长沙: 国防科技大学, 2021. |
| Chen Chao. Research on Task Assignment Algorithms in Unmanned Swarm[D]. Changsha: National University of Defense Technology, 2021. | |
| [9] | Xiong Tao, Liu Fang, Liu Haoting, et al. Multi-drone Optimal Mission Assignment and 3D Path Planning for Disaster Rescue[J]. Drones, 2023, 7(6): 394. |
| [10] | 刘攀, 徐胜利, 张迪, 等. 基于粒子群优化的多导弹动态武器目标分配算法[J]. 南京航空航天大学学报, 2023, 55(1): 108-115. |
| Liu Pan, Xu Shengli, Zhang Di, et al. Multi-missile Dynamic Weapon Target Assignment Algorithm Based on Particle Swarm Optimization[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2023, 55(1): 108-115. | |
| [11] | 王峰, 黄子路, 韩孟臣, 等. 基于KnCMPSO算法的异构无人机协同多任务分配[J]. 自动化学报, 2023, 49(2): 399-414. |
| Wang Feng, Huang Zilu, Han Mengchen, et al. A Knee Point Based Coevolution Multi-objective Particle Swarm Optimization Algorithm for Heterogeneous UAV Cooperative Multi-task Allocation[J]. Acta Automatica Sinica, 2023, 49(2): 399-414. | |
| [12] | 张安, 杨咪, 毕文豪, 等. 基于多策略GWO算法的不确定环境下异构多无人机任务分配[J]. 航空学报, 2023, 44(8): 143-159. |
| Zhang An, Yang Mi, Bi Wenhao, et al. Task Allocation of Heterogeneous Multi-UAVs in Uncertain Environment Based on Multi-strategy Integrated GWO[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(8): 143-159. | |
| [13] | 闫川, 甄子洋, 张继豪, 等. 突防飞行与多区域搜索一体化侦察航迹规划[J]. 飞行力学, 2023, 41(1): 20-26, 46. |
| Yan Chuan, Zhen Ziyang, Zhang Jihao, et al. Integrated Reconnaissance Path Planning of Penetration Flight and Multi Area Search[J]. Flight Dynamics, 2023, 41(1): 20-26, 46. | |
| [14] | Guo Cong, Huang Lei, Tian Kuo. Combinatorial Optimization for UAV Swarm Path Planning and Task Assignment in Multi-obstacle Battlefield Environment[J]. Applied Soft Computing, 2025, 171: 112773. |
| [15] | Liu Chenglou, Xie Fangfang, Ji Tingwei. Fixed-wing UAV Formation Path Planning Based on Formation Control: Theory and Application[J]. Aerospace, 2024, 11(1): 1. |
| [16] | Tong Xiaolong, Yu Shanen, Liu Guangyu, et al. A Hybrid Formation Path Planning Based on A* and Multi-target Improved Artificial Potential Field Algorithm in the 2D Random Environments[J]. Advanced Engineering Informatics, 2022, 54: 101755. |
| [17] | Zhang Jiadong, Ling Hongjie, Tang Zhihao, et al. Path Planning of USV in Confined Waters Based on Improved A* and DWA Fusion Algorithm[J]. Ocean Engineering, 2025, 322: 120475. |
| [18] | 郑红星. 复杂任务/环境下的异构无人机集群全周期任务筹划与在线规划[D]. 哈尔滨: 哈尔滨工业大学, 2022. |
| Zheng Hongxing. Full-cycle Mission Planning and Online Planning of Heterogeneous UAV Swarm Under Complex Missions/Environment[D]. Harbin: Harbin Institute of Technology, 2022. | |
| [19] | 徐杰, 吴蔚楠, 龚春林. 多无人机任务分配/航迹规划的一体化求解方法[J]. 宇航学报, 2023, 44(12): 1860-1870. |
| Xu Jie, Wu Weinan, Gong Chunlin. Integrated Solution Method for Multi-UAV Task Assignment and Trajectory Planning[J]. Journal of Astronautics, 2023, 44(12): 1860-1870. | |
| [20] | Dong Xili, Shi Chenguang, Wen Wen, et al. Multi-mission Oriented Joint Optimization of Task Assignment and Flight Path Planning for Heterogeneous UAV Cluster[J]. Remote Sensing, 2023, 15(22): 5315. |
| [21] | 刘奇辉, 刘海颖, 黄魁华, 等. 基于CBBA的多域作战无人系统任务规划方法研究[J]. 火力与指挥控制, 2024, 49(2): 87-94. |
| Liu Qihui, Liu Haiying, Huang Kuihua, et al. Research on Mission Planning Method of Multi-domain Operation Unmanned Systems Based on CBBA[J]. Fire Control & Command Control, 2024, 49(2): 87-94. | |
| [22] | Harabor Daniel, Grastien Alban. Online Graph Pruning for Pathfinding on Grid Maps[C]//Proceedings of the Twenty-fifth AAAI Conference on Artificial Intelligence and the Twenty-third Conference on Innovative Applications of Artificial Intelligence and the Second Symposium on Educational Advances in Artificial Intelligence. Palo Alto: AAAI Press, 2011: 1114-1119. |
| [23] | Mirjalili Seyedali, Seyed Mohammad Mirjalili, Lewis Andrew. Grey Wolf Optimizer[J]. Advances in Engineering Software, 2014, 69: 46-61. |
| [24] | Chen Yongbo, Yang Di, Yu Jianqiao. Multi-UAV Task Assignment with Parameter and Time-Sensitive Uncertainties Using Modified Two-part Wolf Pack Search Algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(6): 2853-2872. |
| [25] | 张瑞鹏, 冯彦翔, 杨宜康. 多无人机协同任务分配混合粒子群算法[J]. 航空学报, 2022, 43(12): 412-427. |
| Zhang Ruipeng, Feng Yanxiang, Yang Yikang. Hybrid Particle Swarm Algorithm for Multi-UAV Cooperative Task Allocation[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(12): 412-427. | |
| [26] | Zhou Xiaojun, Shi Peng, Lim C C, et al. A Dynamic State Transition Algorithm with Application to Sensor Network Localization[J]. Neurocomputing, 2018, 273: 237-250. |
| [27] | Tanabe Ryoji, Fukunaga Alex S. Improving the Search Performance of SHADE Using Linear Population Size Reduction[C]//2014 IEEE Congress on Evolutionary Computation (CEC). Piscataway: IEEE, 2014: 1658-1665. |
| [28] | Dong Yingchao, Zhang Shaohua, Zhang Hongli, et al. Chaotic Evolution Optimization: A Novel Metaheuristic Algorithm Inspired by Chaotic Dynamics[J]. Chaos Solitons & Fractals, 2025, 192: 116049. |
| [29] | Xue Jiankai, Shen Bo. Dung Beetle Optimizer: A New Meta-heuristic Algorithm for Global Optimization[J]. The Journal of Supercomputing, 2023, 79(7): 7305-7336. |
| [30] | Dehghani Mohammad, Trojovská Eva, Zuščák Tomáš. A New Human-inspired Metaheuristic Algorithm for Solving Optimization Problems Based on Mimicking Sewing Training[J]. Scientific Reports, 2022, 12(1): 17387. |
| [31] | Dhargupta Souvik, Ghosh Manosij, Mirjalili Seyedali, et al. Selective Opposition based Grey Wolf Optimization[J]. Expert Systems with Applications, 2020, 151: 113389. |
| [32] | Ahmed Rasel, Gade Pandu Rangaiah, Mahadzir Shuhaimi, et al. Memory, Evolutionary Operator, and Local Search Based Improved Grey Wolf Optimizer with Linear Population Size Reduction Technique[J]. Knowledge-based Systems, 2023, 264: 110297. |
| [1] | 刘银钢, 马明, 张荣华. 基于大语言模型的兵棋推演动态任务规划[J]. 系统仿真学报, 2026, 38(5): 1187-1204. |
| [2] | 刘大勇, 董志明, 郭齐胜, 张文军, 高建成. 基于平行战场的智能无人系统动态试验与测试架构[J]. 系统仿真学报, 2025, 37(8): 1933-1950. |
| [3] | 房国强, 常海涛, 刘星, 刘正雄, 黄攀峰. 面向空间机器人辅助操作的任务规划方法研究[J]. 系统仿真学报, 2025, 37(2): 325-334. |
| [4] | 王宁, 梁晓龙, 张佳强, 侯岳奇, 杨爱武. 跨域无人集群协同反潜搜索方法研究[J]. 系统仿真学报, 2024, 36(4): 817-824. |
| [5] | 徐毓泽, 张林鍹, 李惠, 葛明, 何莞依. 考虑拆分策略的智能仓库订单分拣建模与优化[J]. 系统仿真学报, 2024, 36(3): 564-577. |
| [6] | 张国辉, 张雅楠, 高昂, 许奥宇. 空地异构无人系统侦察任务规划方法[J]. 系统仿真学报, 2024, 36(2): 497-510. |
| [7] | 王玉芳, 章殿清, 华晓麟, 姚彬彬, 陈凡. 面向航空结构件的双资源分布式柔性调度研究[J]. 系统仿真学报, 2024, 36(11): 2722-2740. |
| [8] | 胡宏宇, 郜天柱, 谷海涛. 基于MLP的海上无人跨域协同效能评估系统的设计与实现[J]. 系统仿真学报, 2024, 36(11): 2542-2551. |
| [9] | 马悦, 吴琳, 郭圣明. 作战任务分配建模及求解方法研究[J]. 系统仿真学报, 2023, 35(4): 887-898. |
| [10] | 马悦, 吴琳, 刘昀, 丁光照. 作战任务优选建模及求解方法研究[J]. 系统仿真学报, 2023, 35(3): 470-483. |
| [11] | 王国陈. 空中联合投送任务规划仿真与效能评估系统[J]. 系统仿真学报, 2022, 34(11): 2497-2506. |
| [12] | 毛李恒, 邓清, 刘柔妮, 孔祥龙. 针对多星多任务仿真调度的关键路径遗传算法[J]. 系统仿真学报, 2021, 33(1): 205-214. |
| [13] | 蔡睿, 王崴, 瞿珏, 胡波. 基于改进粒子群算法的多席位协同任务规划[J]. 系统仿真学报, 2019, 31(5): 1019-1025. |
| [14] | 王田田, 王艳, 纪志成. 基于改进极限学习机的滚动轴承故障诊断[J]. 系统仿真学报, 2018, 30(11): 4413-4420. |
| [15] | 伍文峰, 张昱, 荣明. 基于RTS视角的指挥控制系统智能化技术[J]. 系统仿真学报, 2018, 30(11): 4158-4171. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
