

系统仿真学报 ›› 2024, Vol. 36 ›› Issue (9): 2086-2099.doi: 10.16182/j.issn1004731x.joss.23-0615
李二超, 张生辉
收稿日期:2023-05-24
修回日期:2023-07-07
出版日期:2024-09-15
发布日期:2024-09-30
通讯作者:
张生辉
第一作者简介:李二超(1980-),男,教授,博士,研究方向为多目标优化、人工智能、机器人控制。
基金资助:Li Erchao, Zhang Shenghui
Received:2023-05-24
Revised:2023-07-07
Online:2024-09-15
Published:2024-09-30
Contact:
Zhang Shenghui
摘要:
为了解决具有时间关联性质的动态多目标优化问题,以无人机在线航迹规划问题为基础,引入时间关联特征概念并建立无人机时间关联动态多目标优化问题模型,提出一种使用自适应预测响应机制和时间关联性优化机制的动态多目标双层优化算法。根据环境变化相关性判断环境变化强弱并启用不同响应机制,快速适应环境变化;优化过程中通过最小二乘法学习历史数据拟合航迹未来预测值,根据预测可靠性自适应选择“仅优化当前”或“同时优化当前与未来”优化模式;使用改进后的切比雪夫分解法对符合偏好的航迹进行决策。实验结果表明:所提算法在复杂飞行环境下降低飞行时长的同时具有更高生存概率,提高了无人机飞行稳定性,更合理有效地处理了在线航迹规划问题。
中图分类号:
李二超,张生辉 . 基于DMOEA-APTC算法的无人机在线航迹规划[J]. 系统仿真学报, 2024, 36(9): 2086-2099.
Li Erchao,Zhang Shenghui . UAV Online Track Planning Based on DMOEA-APTC Algorithm[J]. Journal of System Simulation, 2024, 36(9): 2086-2099.
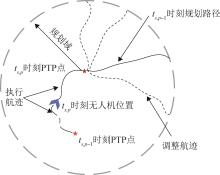
图1
在线航迹规划
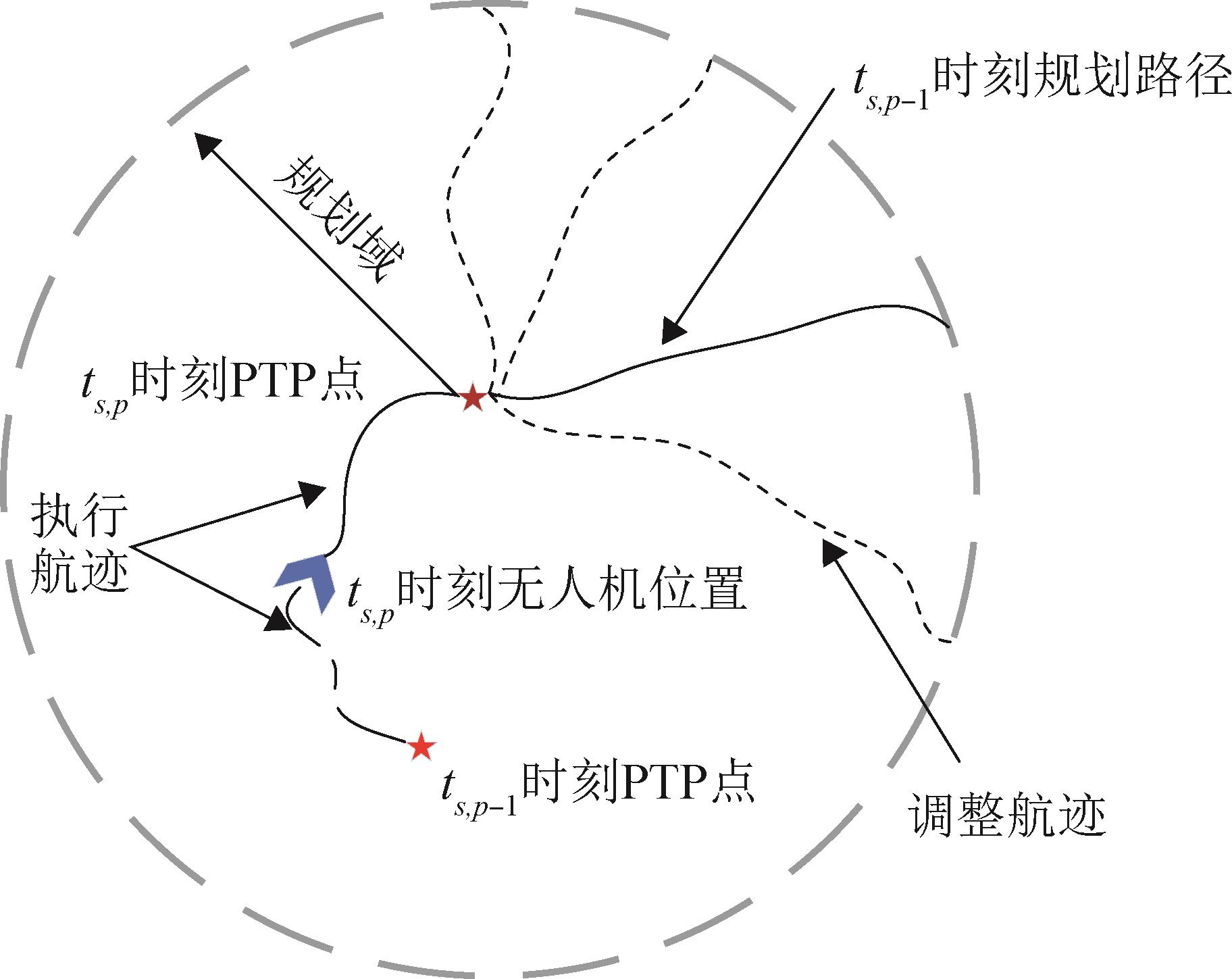
图2
航迹编码

图3
距离代价
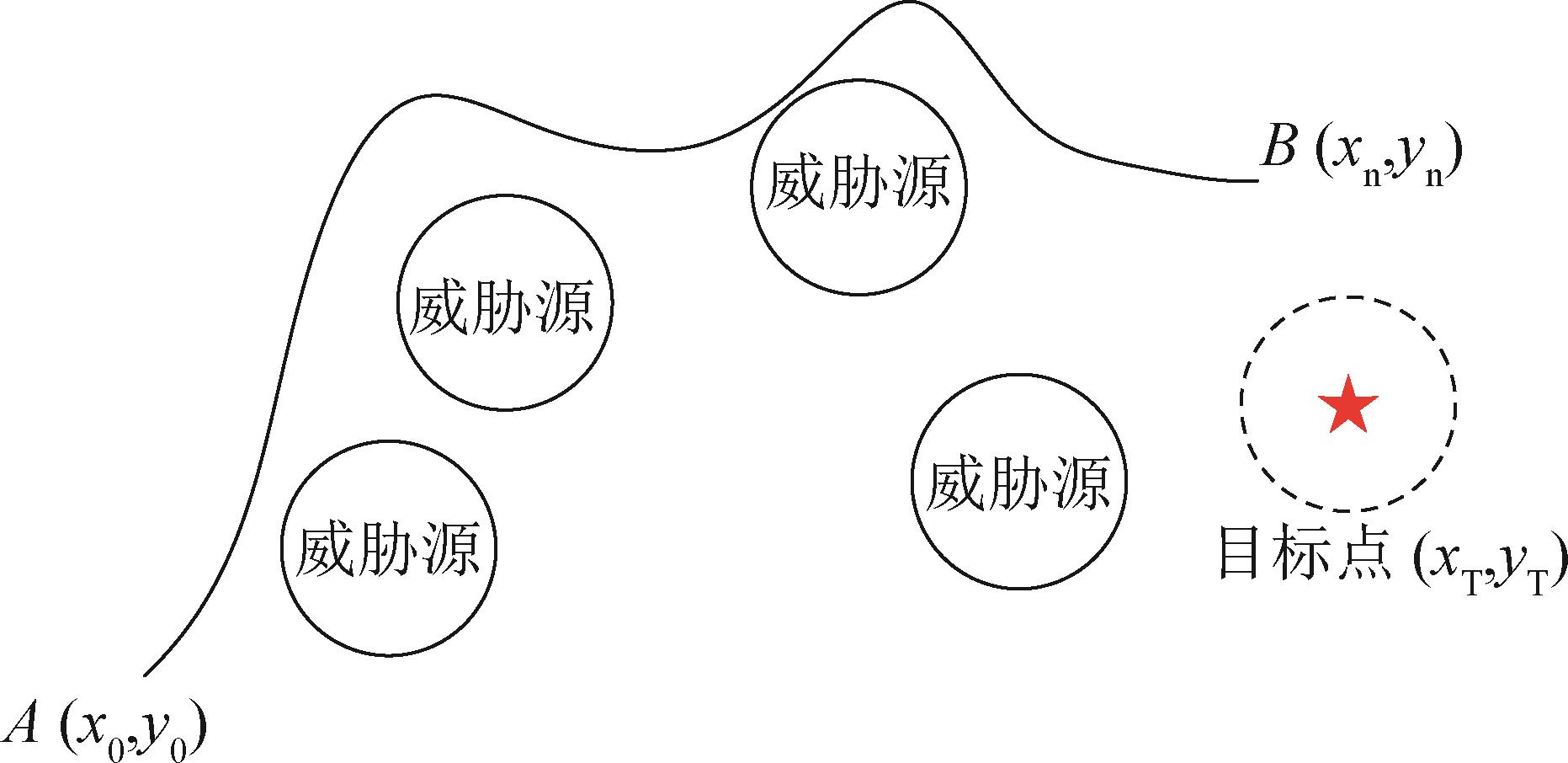
图4
参考直线
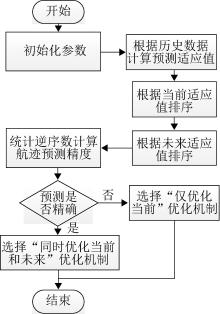
图5
时间关联优化算法流程图
表1
威胁源参数
| 威胁 | ||||
|---|---|---|---|---|
| K1 | -30 | 10 | 3.0 | 3.0 |
| K2 | 5 | 0 | 3.0 | 3.0 |
| K3 | 20 | -10 | 3.0 | 3.0 |
| K4 | 25 | -5 | 3.0 | 3.0 |
| K5 | 30 | 0 | 2.7 | 2.7 |
| K6 | 30 | -40 | 3.0 | 3.0 |
| K7 | -10 | 40 | 3.0 | 3.0 |
| K8 | -20 | -30 | 2.7 | 2.7 |
| K9 | 0 | -30 | 2.1 | 2.1 |
| K10 | -14 | -10 | 2.4 | 2.4 |
| K11 | -10 | 20 | 3.0 | 3.0 |
| K12 | 10 | 30 | 2.1 | 2.1 |
| K13 | -30 | -10 | 3.3 | 3.3 |
| K14 | -30 | 40 | 3.9 | 3.9 |
| K15 | 20 | 20 | 4.5 | 4.5 |
| K16 | 10 | -20 | 4.5 | 4.5 |
| K17 | 30 | 40 | 3.0 | 3.0 |
图6
威胁源分布图

图7
静态威胁情况下规划航迹

图8
静态威胁情况下航向角变化曲线
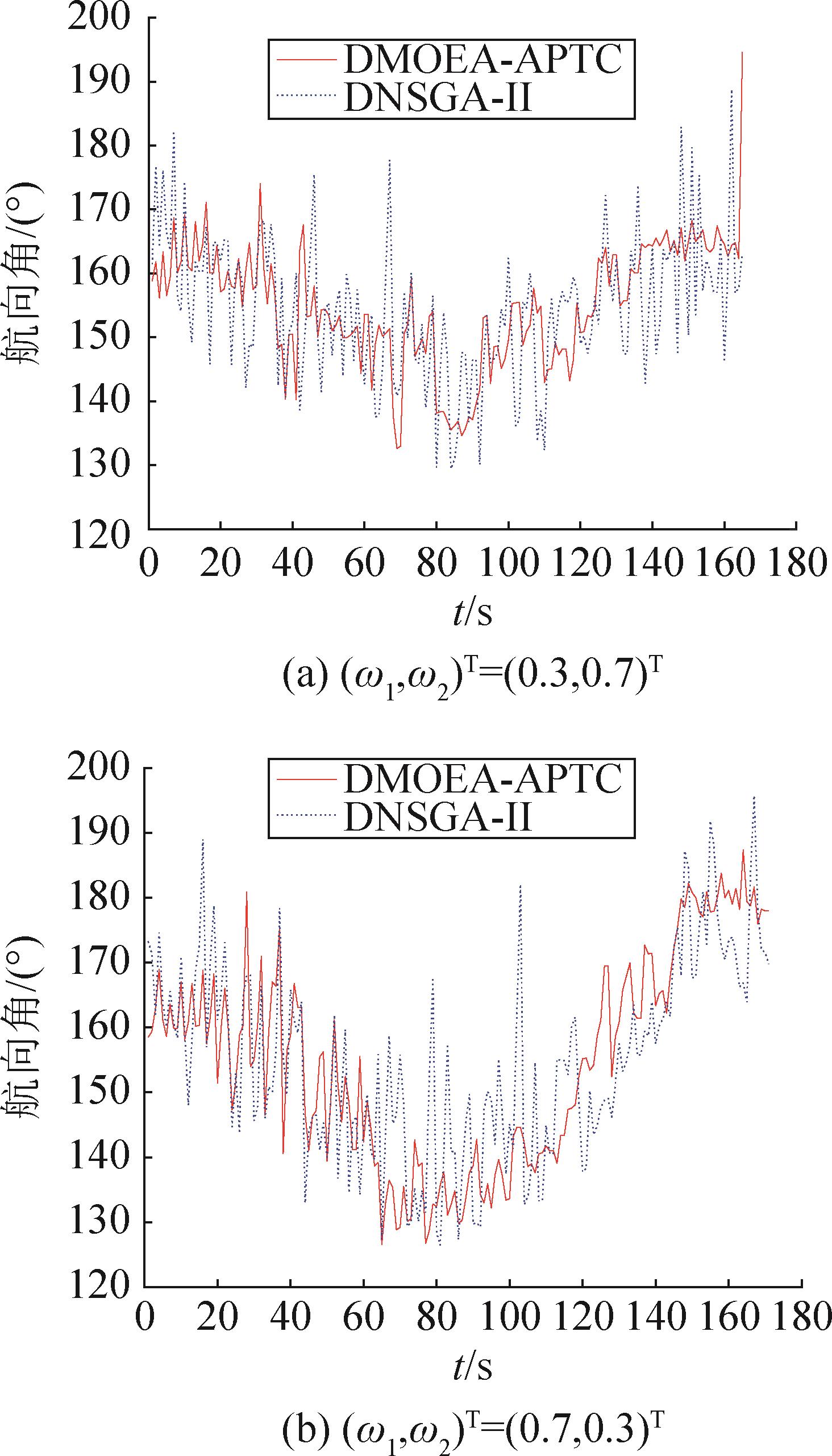
表2
静态威胁情况下规划结果
| 偏好设置 | 规划方法 | 飞行时间/s | 生存概率 | 航向角平均变化值/(°) |
|---|---|---|---|---|
| DMOEA-APTC | 171 | 0.931 68 | 9.667 7 | |
| DNSGA-II | 175 | 0.907 86 | 11.457 4 | |
| DMOEA-APTC | 165 | 0.876 83 | 5.309 0 | |
| DNSGA-II | 168 | 0.850 36 | 8.586 5 |

图9
突发威胁情况下规划航迹
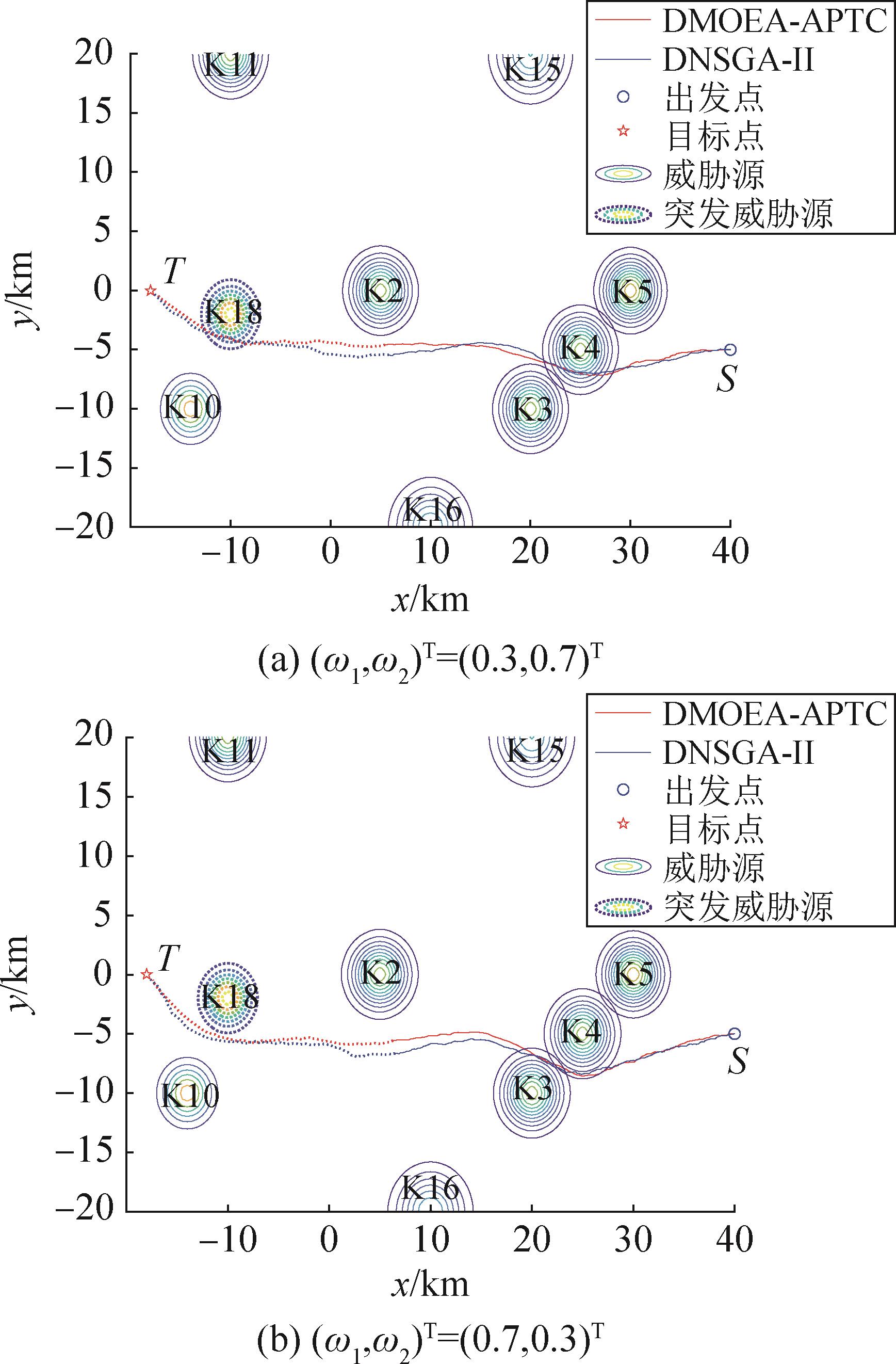

图10
突发威胁情况下航向角变化曲线
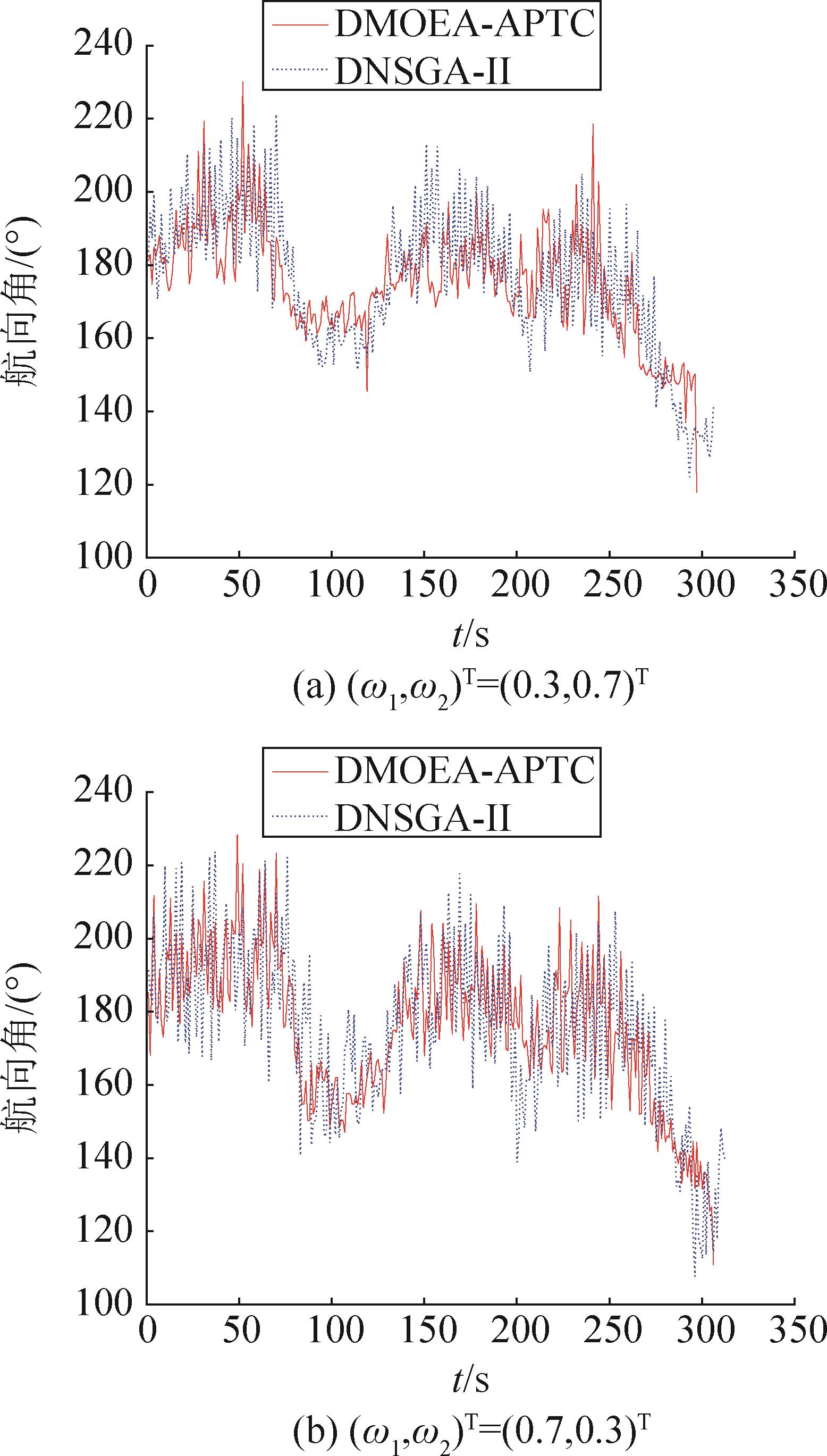
表3
突发威胁情况下规划结果
| 偏好设置 | 规划方法 | 飞行时间/ s | 生存概率 | 航向角平均变化值/(°) |
|---|---|---|---|---|
| DMOEA-APTC | 306 | 0.953 26 | 12.943 7 | |
| DNSGA-II | 312 | 0.957 49 | 14.849 7 | |
| DMOEA-APTC | 297 | 0.812 97 | 8.558 2 | |
| DNSGA-II | 306 | 0.850 36 | 11.978 3 |

图11
突变威胁情况下规划航迹
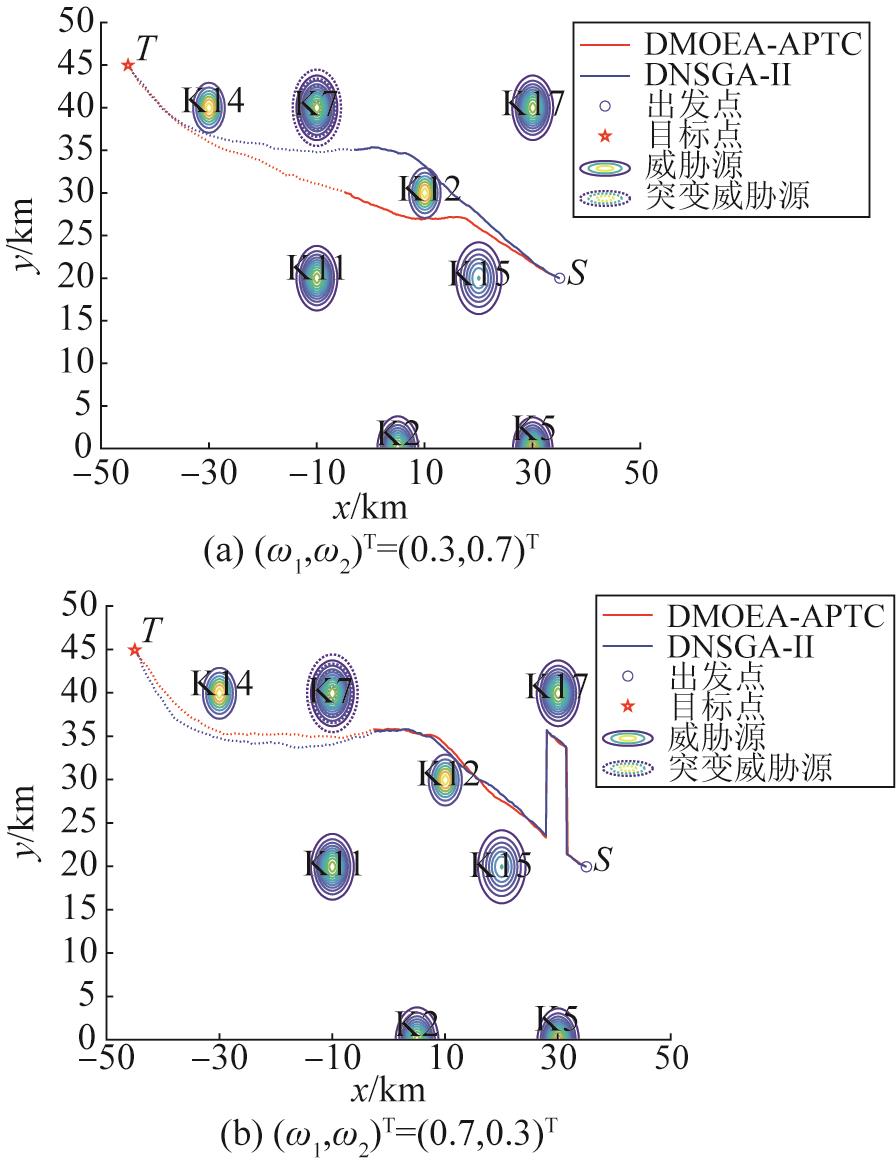

图12
突变威胁情况下航向角变化曲线
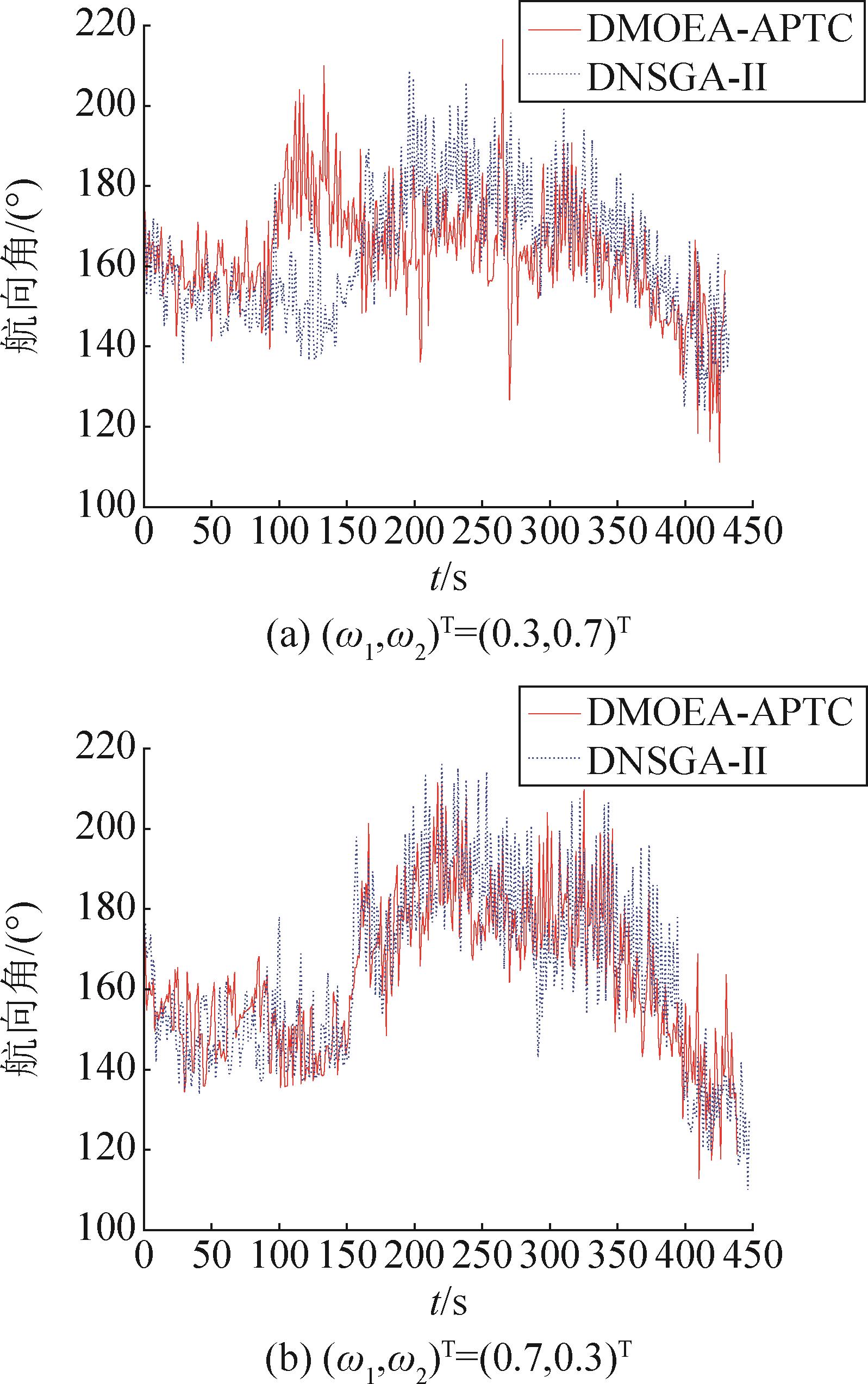
表4
突变威胁情况下规划结果
| 偏好设置 | 规划方法 | 飞行时间/s | 生存概率 | 航向角平均变化值/(°) |
|---|---|---|---|---|
| DMOEA-APTC | 438 | 0.916 01 | 11.887 3 | |
| DNSGA-II | 447 | 0.892 31 | 14.160 6 | |
| DMOEA-APTC | 429 | 0.844 18 | 8.930 3 | |
| DNSGA-II | 432 | 0.810 41 | 11.247 6 |
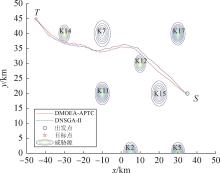
图13
偏好设置改变情况下规划航迹

图14
偏好设置改变情况下航向角变化曲线
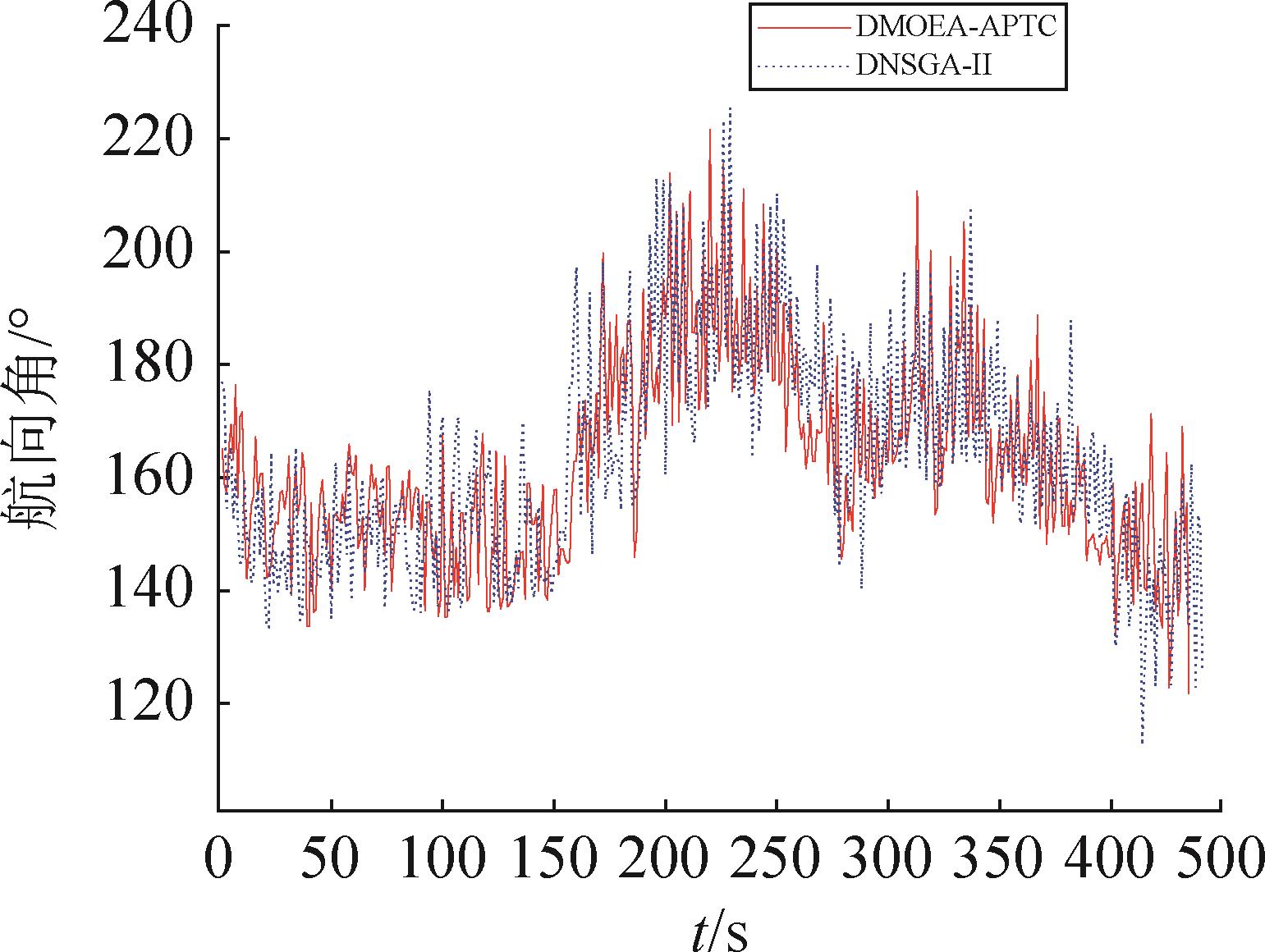
表5
偏好改变情况下规划结果
| 偏好设置 | 规划方法 | 飞行时间/s | 生存概率 | 航向角平均变化值/(°) |
|---|---|---|---|---|
| DMOEA-APTC | 435 | 0.884 95 | 11.036 7 | |
| DNSGA-II | 441 | 0.875 93 | 13.085 1 |
| 1 | 卢新来, 杜子亮, 许赟. 航空人工智能概念与应用发展综述[J]. 航空学报, 2021, 42(4): 245-258. |
| Lu Xinlai, Du Ziliang, Xu Yun. Review on Basic Concept and Applications for Artificial Intelligence in Aviation[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 245-258. | |
| 2 | 杨伟. 关于未来战斗机发展的若干讨论[J]. 航空学报, 2020, 41(6): 1-12. |
| Yang Wei. Some Discussions on the Development of Future Fighters[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(6): 1-12. | |
| 3 | Harker T W, Gilday M M, Berger D H. Department of Navy Unmanned Campaign Framework[EB/OL]. [2021-03-16]. . |
| 4 | 雷宏杰, 姚呈康. 面向军事应用的航空人工智能技术架构研究[J]. 导航定位与授时, 2020, 7(1): 1-11. |
| Lei Hongjie, Yao Chengkang. Technical Architecture of Aviation Artificial Intelligence for Military Application[J]. Navigation Positioning and Timing, 2020, 7(1): 1-11. | |
| 5 | Aggarwal Shubhani, Kumar Neeraj. Path Planning Techniques for Unmanned Aerial Vehicles: A Review, Solutions, and Challenges[J]. Computer Communications, 2020, 149: 270-299. |
| 6 | Shahid Noor, Abrar Muhammad, Ajmal Ushna, et al. Path Planning in Unmanned Aerial Vehicles: An Optimistic Overview[J]. International Journal of Communication Systems, 2022, 35(6): e5090. |
| 7 | 李波, 屈原, 徐静. 复杂动态环境下基于DMPC-PSO 的多无人机在线航迹规划[J]. 内蒙古师范大学学报(自然科学汉文版), 2018, 47(6): 491-498. |
| Li Bo, Qu Yuan, Xu Jing. DMPC-PSO Based on Multiple Unmanned Aerial Vehicles Real-time Route Planning in Complex Dynamic Environment[J]. Journal of Inner Mongolia Normal University(Natural Science Edition), 2018, 47(6): 491-498. | |
| 8 | 陈都, 孟秀云. 基于改进ARA*算法的无人机在线航迹规划[J]. 飞行力学, 2021, 39(1): 60-65. |
| Chen Dou, Meng Xiuyun. UAV Online Path Planning Based on Improved ARA* Algorithm[J]. Flight Dynamics, 2021, 39(1): 60-65. | |
| 9 | Li Keyu, Lu Yonggen, Zhang Yanchi. Dynamic Obstacle Avoidance Path Planning of UAV Based on Improved APF[C]//2020 5th International Conference on Communication, Image and Signal Processing (CCISP). Piscataway, NJ, USA: IEEE, 2020: 159-163. |
| 10 | Liu Wei, Hao Peng, Zheng Zheng, et al. FBCRI Based Real-time Path Planning for Unmanned Aerial Vehicles in Unknown Environments with Uncertainty[J]. 机器人, 2013, 35(6): 641-650. |
| 11 | Margraff Julien, Stéphant Joanny, Labbani-Igbida Ouiddad. UAV 3D Path and Motion Planning in Unknown Dynamic Environments[C]//2020 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway, NJ, USA: IEEE, 2020: 77-84. |
| 12 | 彭星光, 徐德民, 高晓光. 基于Pareto解集关联与预测的动态多目标进化算法[J]. 控制与决策, 2011, 26(4): 615-618. |
| Peng Xingguang, Xu Demin, Gao Xiaoguang. A Dynamic Multi-objective Evolutionary Algorithm Based on Pareto Set Linkage and Prediction[J]. Control and Decision, 2011, 26(4): 615-618. | |
| 13 | 唐嘉钰, 李相民, 代进进. 基于威胁建模的UCAV武器投放在线航迹规划[J]. 西北工业大学学报, 2021, 39(2): 382-391. |
| Tang Jiayu, Li Xiangmin, Dai Jinjin. Online Trajectory Planning for UCAV Performing Ground Attacks Based on Threat Modeling[J]. Journal of Northwestern Polytechnical University, 2021, 39(2): 382-391. | |
| 14 | 汪瀚洋, 陈亮, 徐海, 等. 基于MOEA/D-ARMS的无人机在线航迹规划[J]. 系统工程与电子技术, 2022, 44(11): 3505-3514. |
| Wang Hanyang, Chen Liang, Xu Hai, et al. UAV Online Trajectory Planning Based on MOEA/D-ARMS[J]. Systems Engineering and Electronics, 2022, 44(11): 3505-3514. | |
| 15 | 任智, 张栋, 唐硕. 基于强化学习的改进三维A*算法在线航迹规划[J]. 系统工程与电子技术, 2023, 45(1): 193-201. |
| Ren Zhi, Zhang Dong, Tang Shuo. Improved Three-dimensional A* Algorithm of Real-time Path Planning Based on Reinforcement Learning[J]. Systems Engineering and Electronics, 2023, 45(1): 193-201. | |
| 16 | 池海红, 周明鑫. 融合强化学习和进化算法的高超声速飞行器航迹规划[J]. 控制理论与应用, 2022, 39(5): 847-856. |
| Chi Haihong, Zhou Mingxin. Trajectory Planning for Hypersonic Vehicle Combined with Reinforcement Learning and Evolutionary Algorithms[J]. Control Theory & Applications, 2022, 39(5): 847-856. | |
| 17 | Deb Kalyanmoy, Udaya Bhaskara Rao N, Karthik S. Dynamic Multi-objective Optimization and Decision-making Using Modified NSGA-II: A Case Study on Hydro-thermal Power Scheduling[C]//Evolutionary Multi-Criterion Optimization. Berlin, Heidelberg: Springer Berlin Heidelberg, 2007: 803-817. |
| 18 | Li Yibing, Zhang Sitong, Ye Fang, et al. A UAV Path Planning Method Based on Deep Reinforcement Learning[C]//2020 IEEE USNC-CNC-URSI North American Radio Science Meeting (Joint with AP-S Symposium). Piscataway, NJ, USA: IEEE, 2020: 93-94. |
| 19 | Liu Shengwei, Ma Yue. Research for Bidirectional Path Planning Based on An Improved A* Algorithm[C]//2020 IEEE International Conference on Advances in Electrical Engineering and Computer Applications(AEECA). Piscataway: IEEE, 2020: 1036-1039. |
| 20 | Chen Haiyang, Ji Yebiao, Niu Longhui. Reinforcement Learning Path Planning Algorithm Based on Obstacle Area Expansion Strategy[J]. Intelligent Service Robotics, 2020, 13(2): 289-297. |
| 21 | Li Bohao, Wu Yunjie. Path Planning for UAV Ground Target Tracking Via Deep Reinforcement Learning[J]. IEEE Access, 2020, 8: 29064-29074. |
| 22 | Dogan A. Probabilistic Path Planning for UAVs[C]//2nd AIAA "Unmanned Unlimited" Conf. and Workshop & Exhibit. Reston, VA, USA: AIAA, 2003: AIAA 2003-6552. |
| 23 | Roberge V, Tarbouchi M, Labonté Gilles. Fast Genetic Algorithm Path Planner for Fixed-wing Military UAV Using GPU[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(5): 2105-2117. |
| 24 | Song Qi, Zhao Qinglei, Wang Shuxin, et al. Dynamic Path Planning for Unmanned Vehicles Based on Fuzzy Logic and Improved Ant Colony Optimization[J]. IEEE Access, 2020, 8: 62107-62115. |
| 25 | Wu Xiaojing, Xu Lei, Zhen Ran, et al. Biased Sampling Potentially Guided Intelligent Bidirectional RRT∗ Algorithm for UAV Path Planning in 3D Environment[J]. Mathematical Problems in Engineering, 2019, 2019: 5157403. |
| 26 | Ma Xiaoliang, Zhang Qingfu, Tian Guangdong, et al. On Tchebycheff Decomposition Approaches for Multiobjective Evolutionary Optimization[J]. IEEE Transactions on Evolutionary Computation, 2018, 22(2): 226-244. |
| 27 | 何春雄, 龙卫江, 朱锋峰. 概率论与数理统计[M]. 北京: 高等教育出版社, 2012: 79-80. |
| 28 | 彭星光. 面向无人系统的动态进化算法及应用[M]. 北京: 科学出版社, 2017: 87-104. |
| 29 | Xu Biao, Zhang Yong, Gong Dunwei, et al. Environment Sensitivity-based Cooperative Co-evolutionary Algorithms for Dynamic Multi-objective Optimization[J]. IEEE/ACM Transactions on Computational Biology and Bioinformatics, 2018, 15(6): 1877-1890. |
| 30 | Goh C K, Tan K C. A Coevolutionary Paradigm for Dynamic Multi-objective Optimization[M]//Goh C K, Tan K C. Evolutionary Multi-objective Optimization in Uncertain Environments: Issues and Algorithms. Berlin, Heidelberg: Springer Berlin Heidelberg, 2009: 153-185. |
| 31 | Deb K, Thiele L, Laumanns M, et al. Scalable Test Problems for Evolutionary Multiobjective Optimization[M]//Abraham A, Jain L, Goldberg R. Evolutionary Multiobjective Optimization: Theoretical Advances and Applications. London: Springer London, 2005: 105-145. |
| [1] | 陈鑫杭, 凌晓冬, 郎程畅, 郑师军, 汤伊奇. 基于改进趋近律的共轴双旋翼无人机控制研究[J]. 系统仿真学报, 2026, 38(4): 1119-1128. |
| [2] | 谢俊, 张琦, 彭延云, 石浩楠, 李东阳, 刘熙. 基于无碰撞轨迹的无人机路径规划方法研究[J]. 系统仿真学报, 2026, 38(3): 808-817. |
| [3] | 杨灿, 陈凯, 朱峰. 多约束条件下基于强化学习的无人机团队定向优化方法[J]. 系统仿真学报, 2026, 38(2): 360-371. |
| [4] | 江好胜, 武芳芳, 黄泽贤, 马子玥, 董春云, 平续斌. 动态障碍物环境下多四旋翼轨迹规划与跟踪[J]. 系统仿真学报, 2025, 37(8): 2089-2102. |
| [5] | 屈长虹, 王俊杰, 王坤, 崔清勇, 陈蒋洋, 王鑫鹏. 基于联合DQN的定向能系统火力智能决策建模仿真方法[J]. 系统仿真学报, 2025, 37(5): 1256-1265. |
| [6] | 张森, 代强强. 改进型深度确定性策略梯度的无人机路径规划[J]. 系统仿真学报, 2025, 37(4): 875-881. |
| [7] | 杨超, 郑瑞群, 李圳, 张鸿薇, 唐燕群, 李东泽. 面向无人机辅助车联网的并行任务传输与处理优化策略[J]. 系统仿真学报, 2025, 37(3): 635-645. |
| [8] | 胡世军, 刘海亮, 王兵雷, 苏文科. 基于定向探索树算法的四旋翼无人机路径规划[J]. 系统仿真学报, 2025, 37(2): 311-324. |
| [9] | 彭艺, 雷云揆, 杨青青, 李辉, 王健明. 改进PID搜索算法的山地环境无人机路径规划[J]. 系统仿真学报, 2025, 37(12): 3075-3086. |
| [10] | 李博宁, 陈明, 齐舒畅, 孟浩然, 王磊. 基于扰动观测器和指令滤波的四旋翼无人机姿态控制[J]. 系统仿真学报, 2025, 37(11): 2793-2803. |
| [11] | 梁秀满, 刘子良, 刘振东. 基于深度强化学习的改进RRT算法路径规划[J]. 系统仿真学报, 2025, 37(10): 2578-2593. |
| [12] | 黄智钦, 卢恬英, 陈哲毅. 面向大规模IoT系统的多无人机部署与协作卸载[J]. 系统仿真学报, 2025, 37(1): 25-39. |
| [13] | 吴雨欣, 张志龙, 刘奥旭, 邹江威, 李楚为. 基于多视观测优化的无人机运动目标测速方法研究[J]. 系统仿真学报, 2025, 37(1): 40-53. |
| [14] | 尹安琳, 张著洪. 复杂环境下无人机路径规划及其改进型人工兔优化[J]. 系统仿真学报, 2025, 37(1): 79-94. |
| [15] | 刘斌, 兰莹, 黄文焘, 范勤勤. 融合动态窗口法的无人机动态路径规划算法[J]. 系统仿真学报, 2024, 36(8): 1843-1853. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
