

系统仿真学报 ›› 2024, Vol. 36 ›› Issue (4): 888-900.doi: 10.16182/j.issn1004731x.joss.22-1381
姜兆祯1,2,3( ), 王文龙1,2,3(), 孙文祺1,2
), 王文龙1,2,3(), 孙文祺1,2
收稿日期:2022-11-18
修回日期:2023-01-13
出版日期:2024-04-15
发布日期:2024-04-18
通讯作者:
王文龙
E-mail:1596787157@qq.com;wilon7521@qq.com
第一作者简介:姜兆祯(1996-),男,满族,博士生,研究方向为移动机器人自主避障以及路径规划。E-mail:1596787157@qq.com
基金资助:
Jiang Zhaozhen1,2,3(), Wang Wenlong1,2,3(), Sun Wenqi1,2
Received:2022-11-18
Revised:2023-01-13
Online:2024-04-15
Published:2024-04-18
Contact:
Wang Wenlong
E-mail:1596787157@qq.com;wilon7521@qq.com
摘要:
针对快速扩展随机树(RRT)算法在无人艇路径规划工作中目的性较弱的问题,提出一种改进的无人艇路径规划快速求解算法。对人工势场法进行改进,额外添加4个方向的受力分析,综合计算无人艇所受合力;重新定义转向角度的计算 方法 ,避免其进入局部最优陷阱,使其可以顺利抵达目标点,得到一条初始路径;利用该初始路径来设定快速扩展随机树算法的随机点采样区域,通过降低随机采样点生成在无价值区域的概率,以提高算法的目的性和时效性,得到二次规划路径;对二次规划路径进行冗余点去除操作,减少路径节点的同时可以进一步降低路径代价,得到最终的规划路径。实验结果表明:改进算法在取得相近代价的路径时,运行时间最多降低了84.14%,采样点数量最多减少了70.09%,算法质量更好,运行效率更高。
中图分类号:
姜兆祯,王文龙,孙文祺 . 基于改进RRT*算法的无人艇路径规划快速求解算法[J]. 系统仿真学报, 2024, 36(4): 888-900.
Jiang Zhaozhen,Wang Wenlong,Sun Wenqi . Path Planning Rapid Algorithm Based on Modified RRT* for Unmanned Surface Vessel[J]. Journal of System Simulation, 2024, 36(4): 888-900.
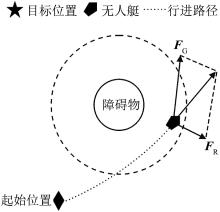
图1
人工势场法
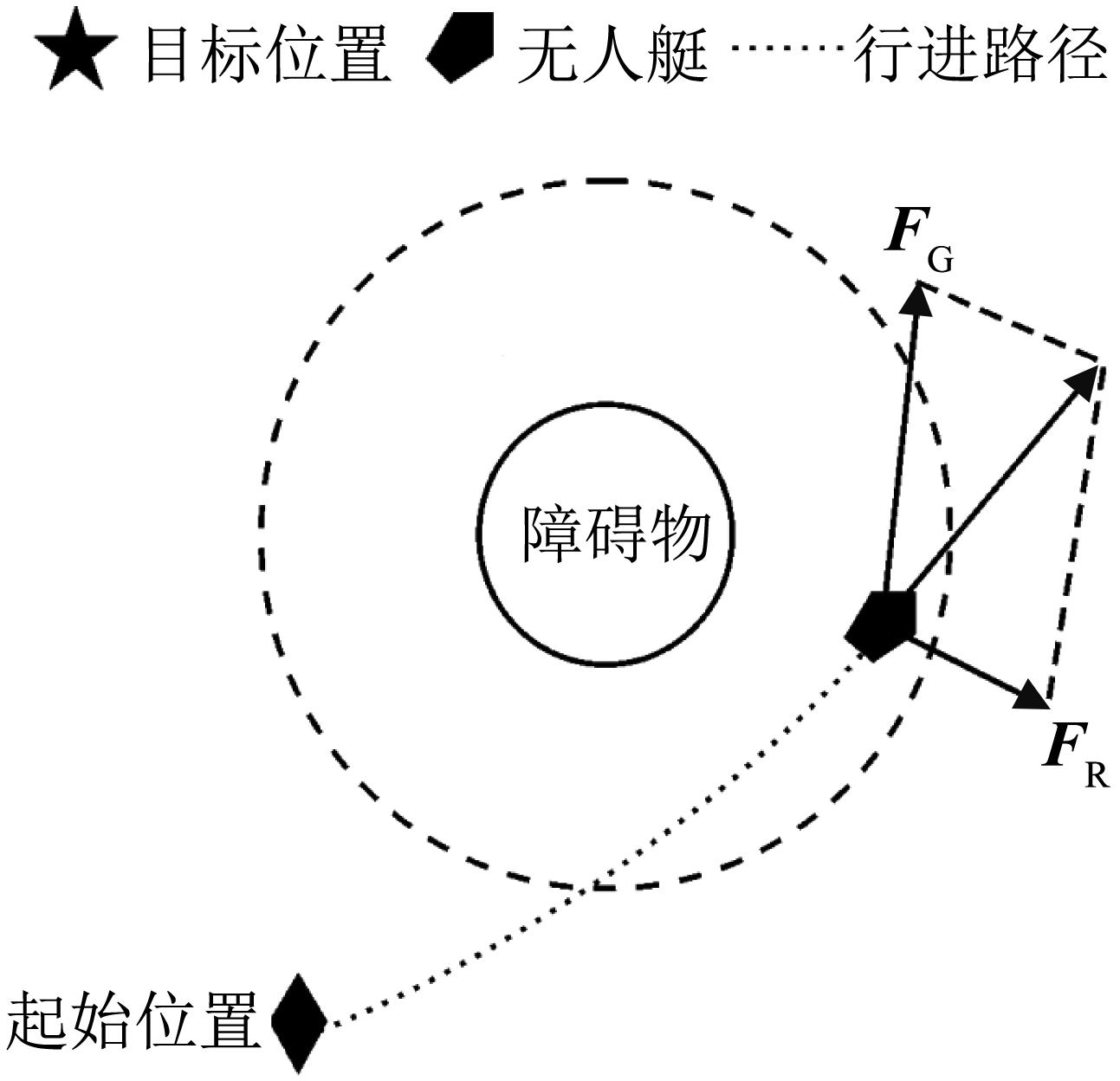
图2
几种目标不可达情况
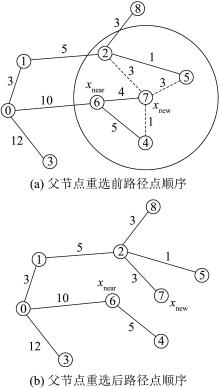
图3
重选父节点过程
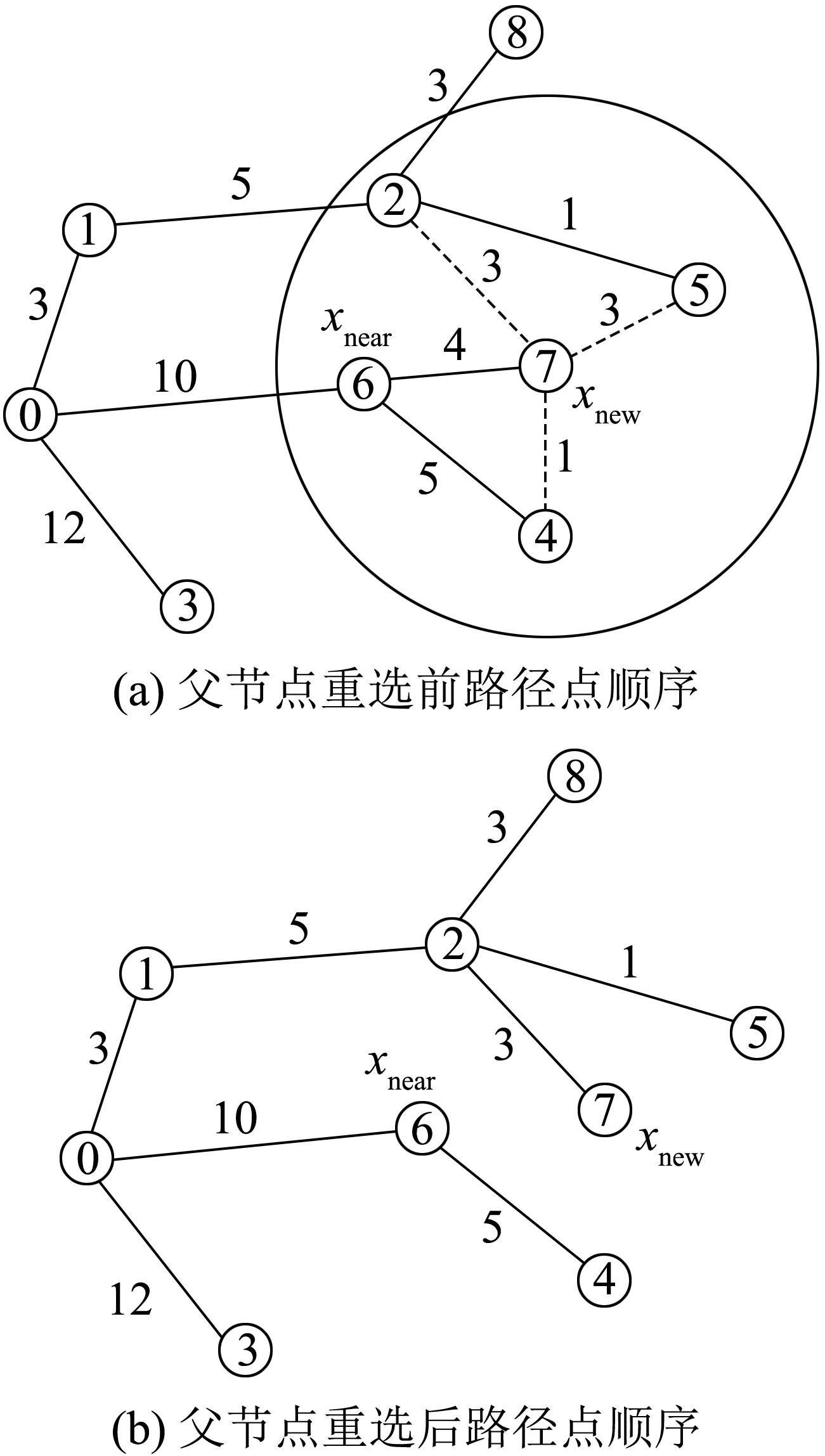
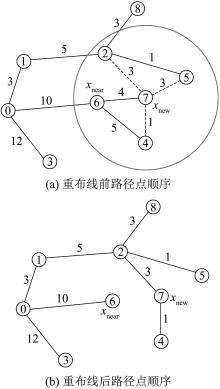
图4
重布线过程
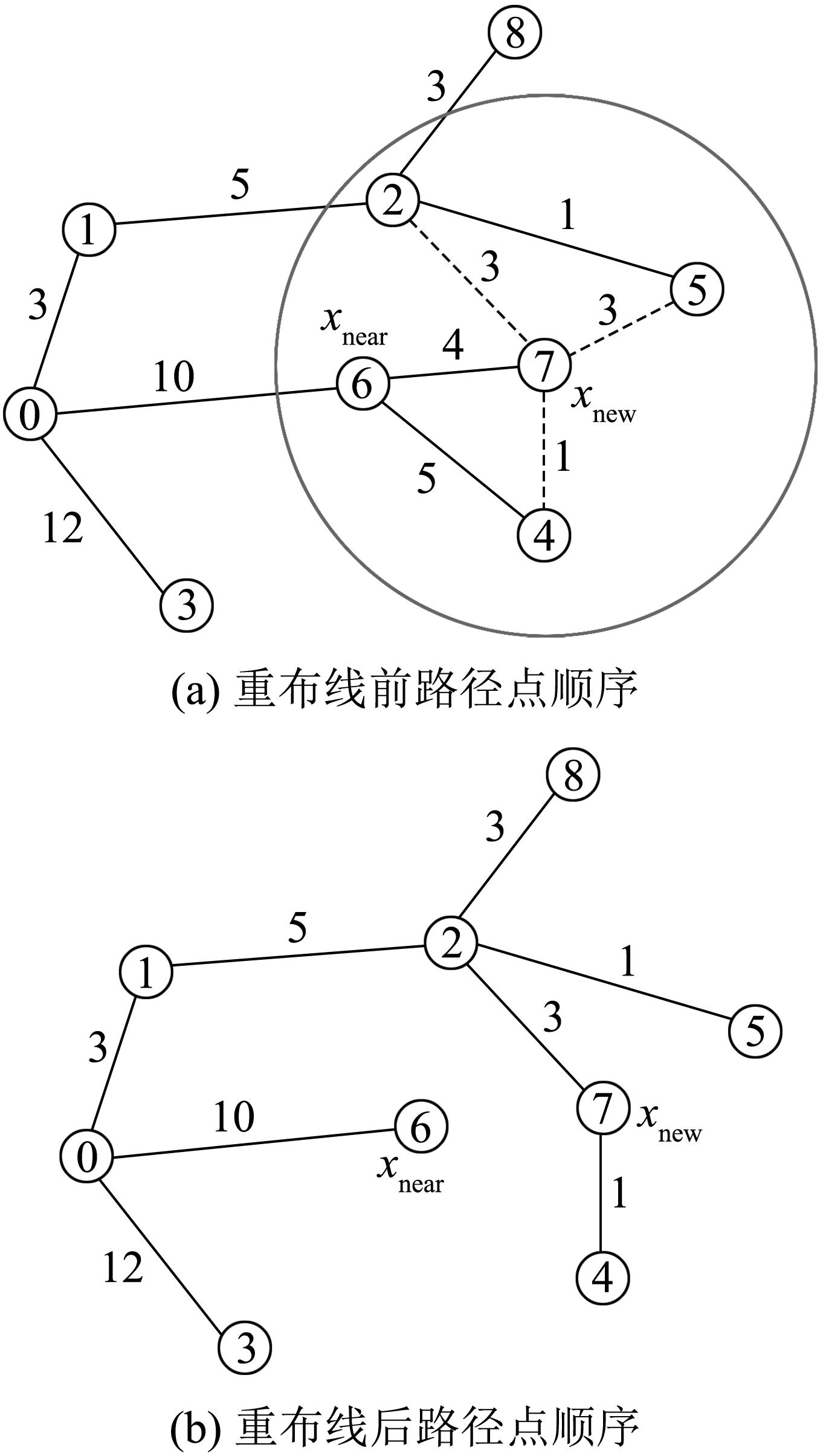
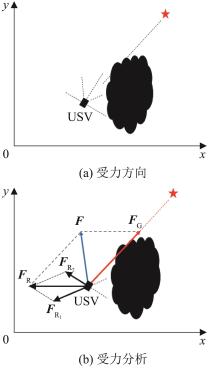
图5
改进APF受力分析图
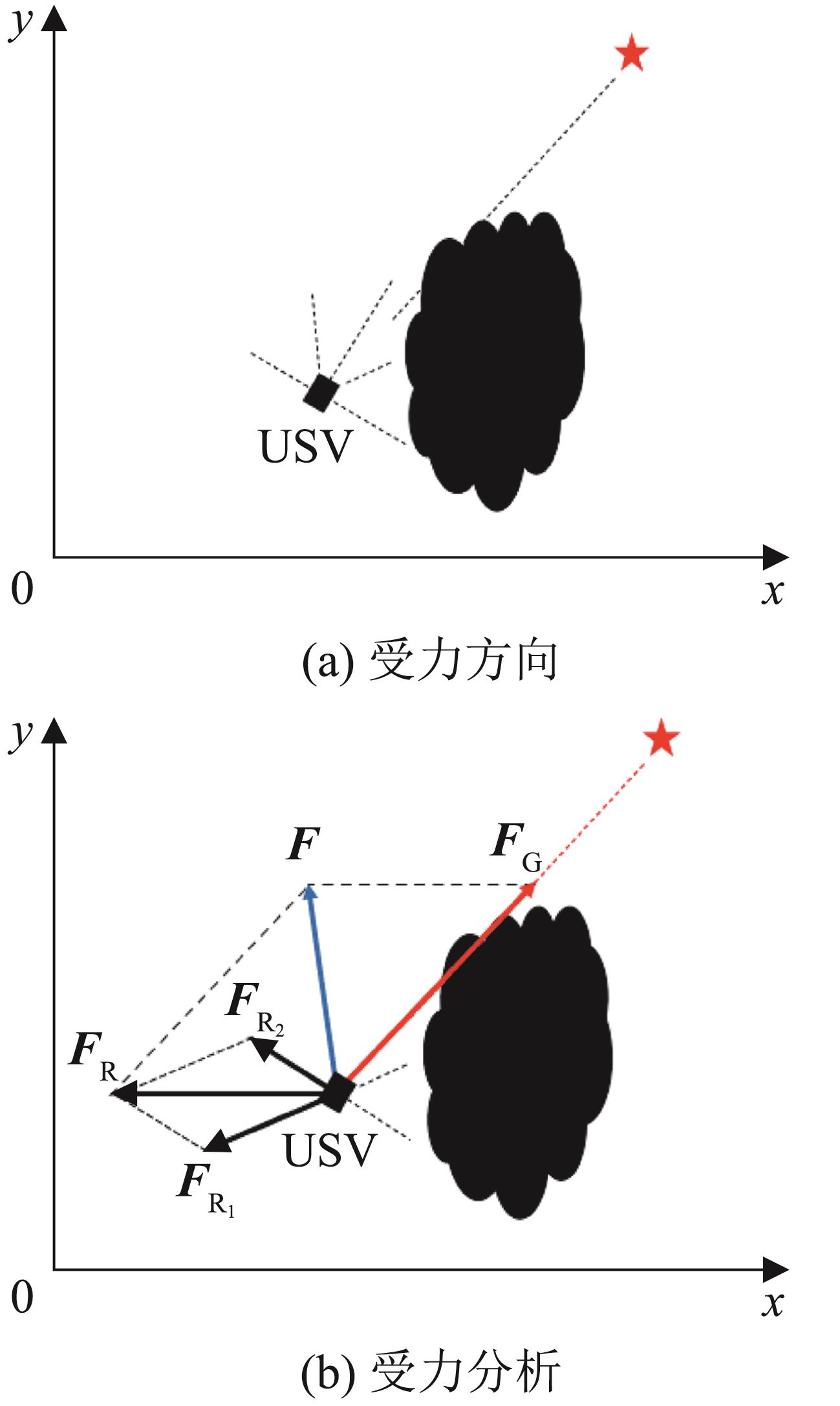
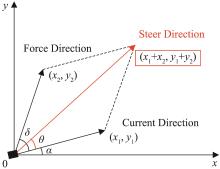
图6
转向角度
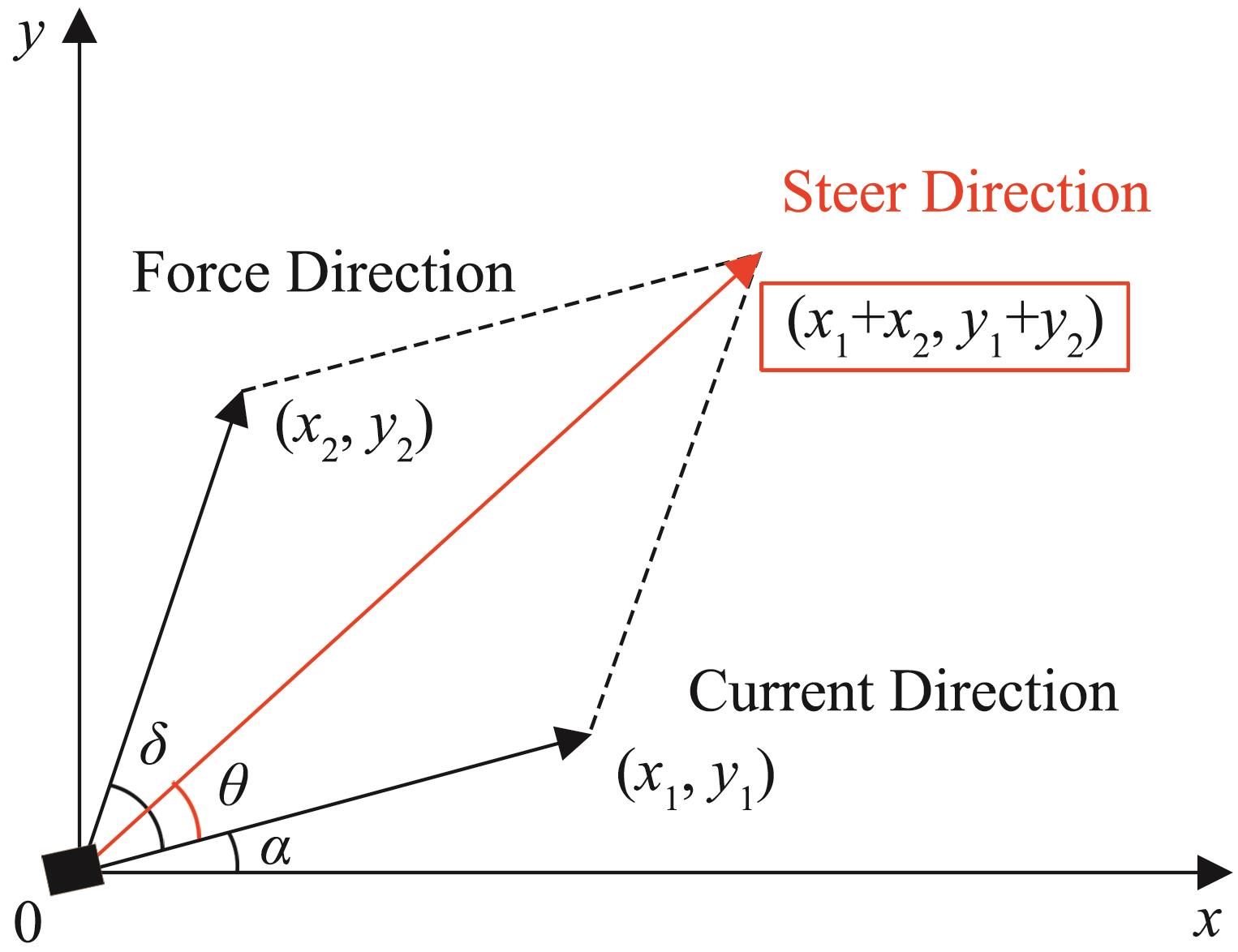
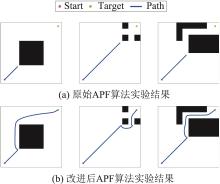
图7
改进前后APF实验结果
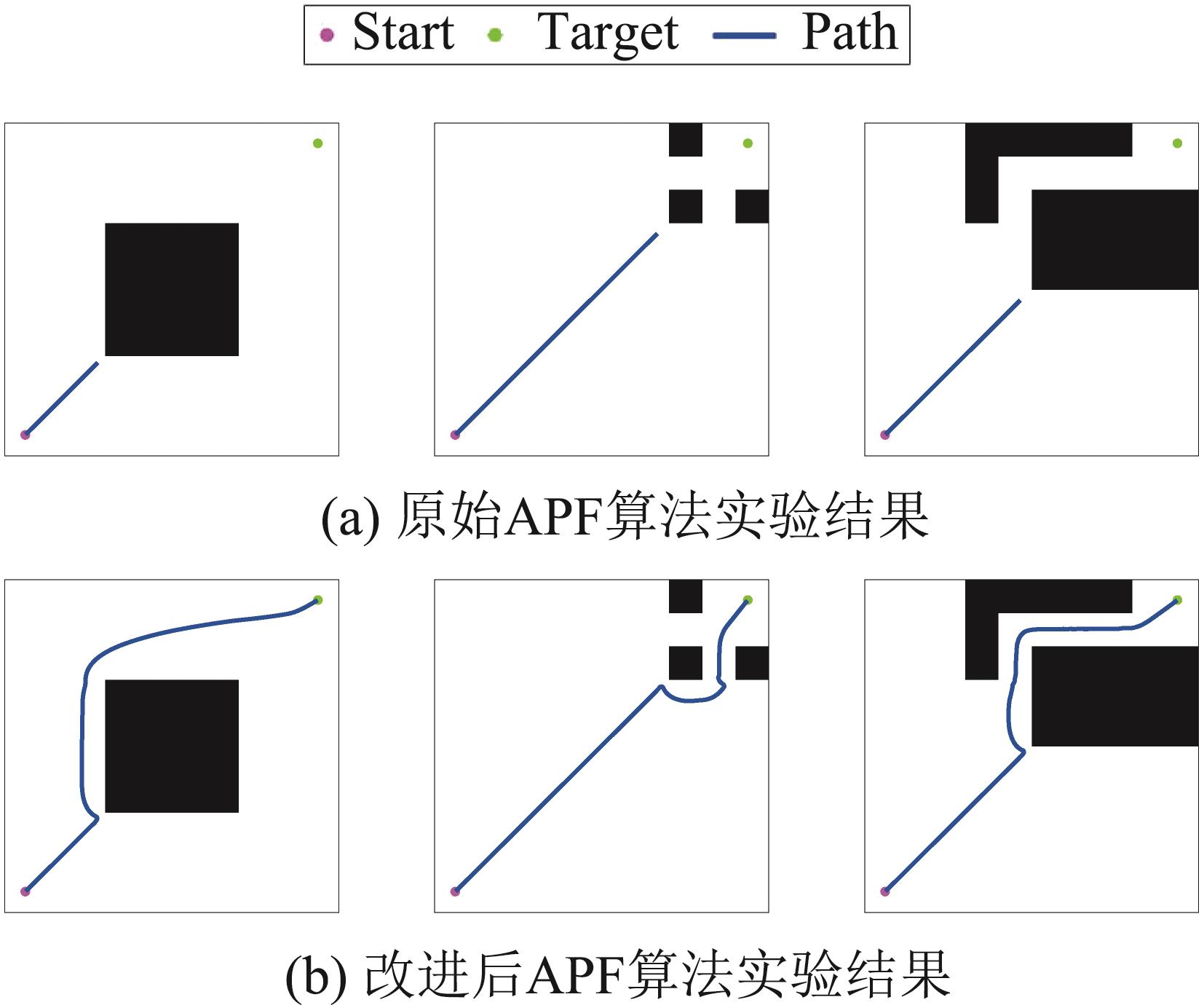

图8
转向前区域放大图
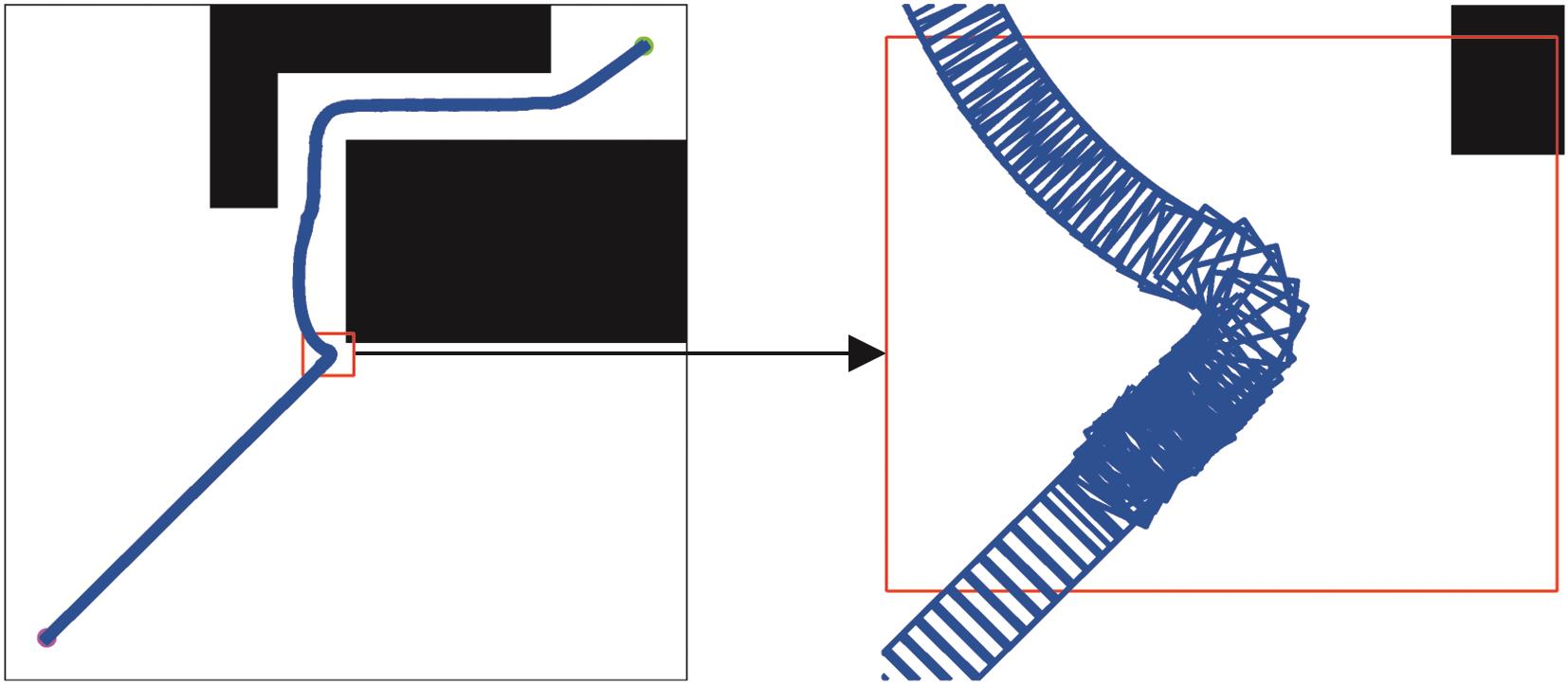

图9
2种采样区域设置方法
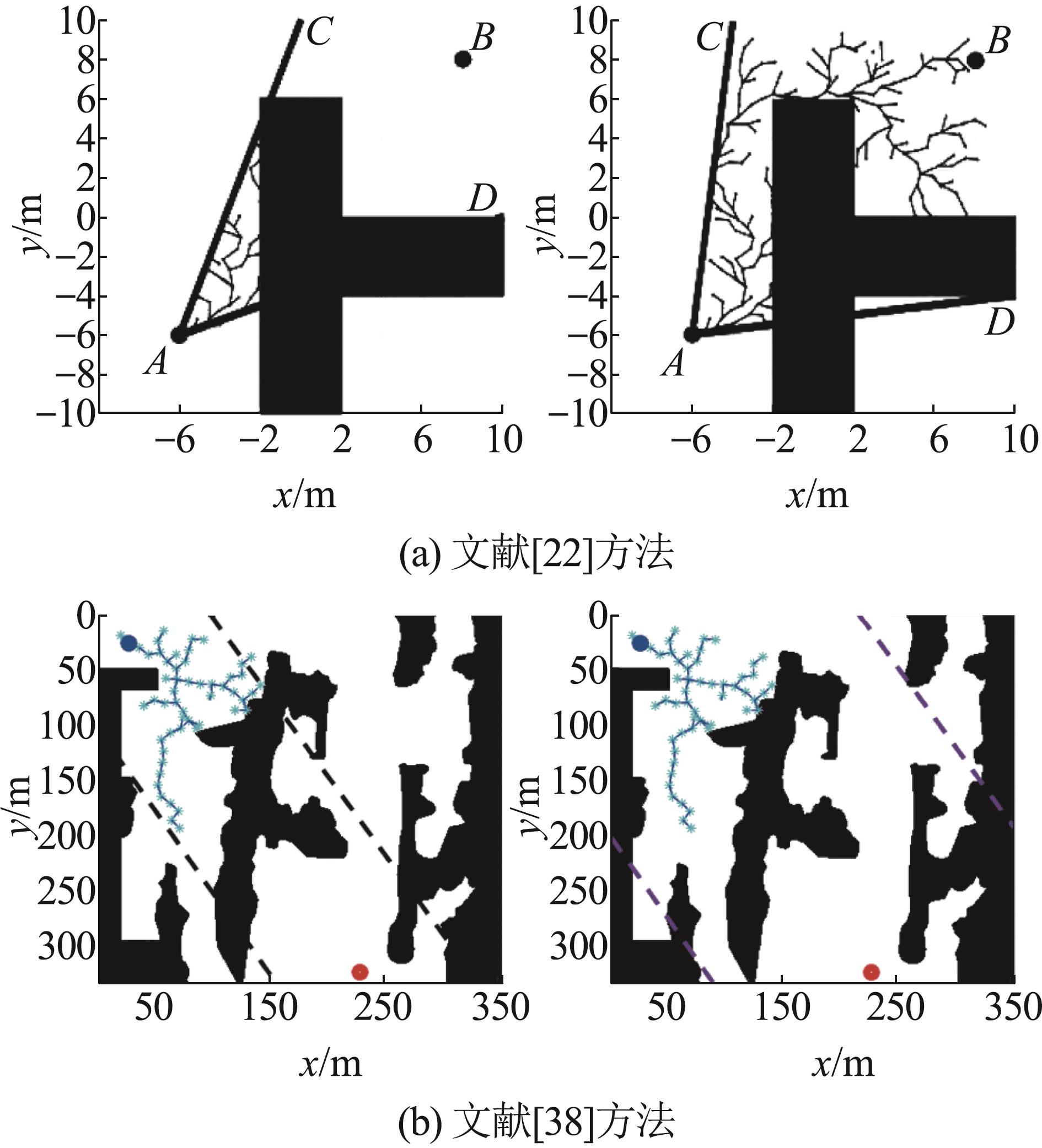

图10
采样区域仿真结果
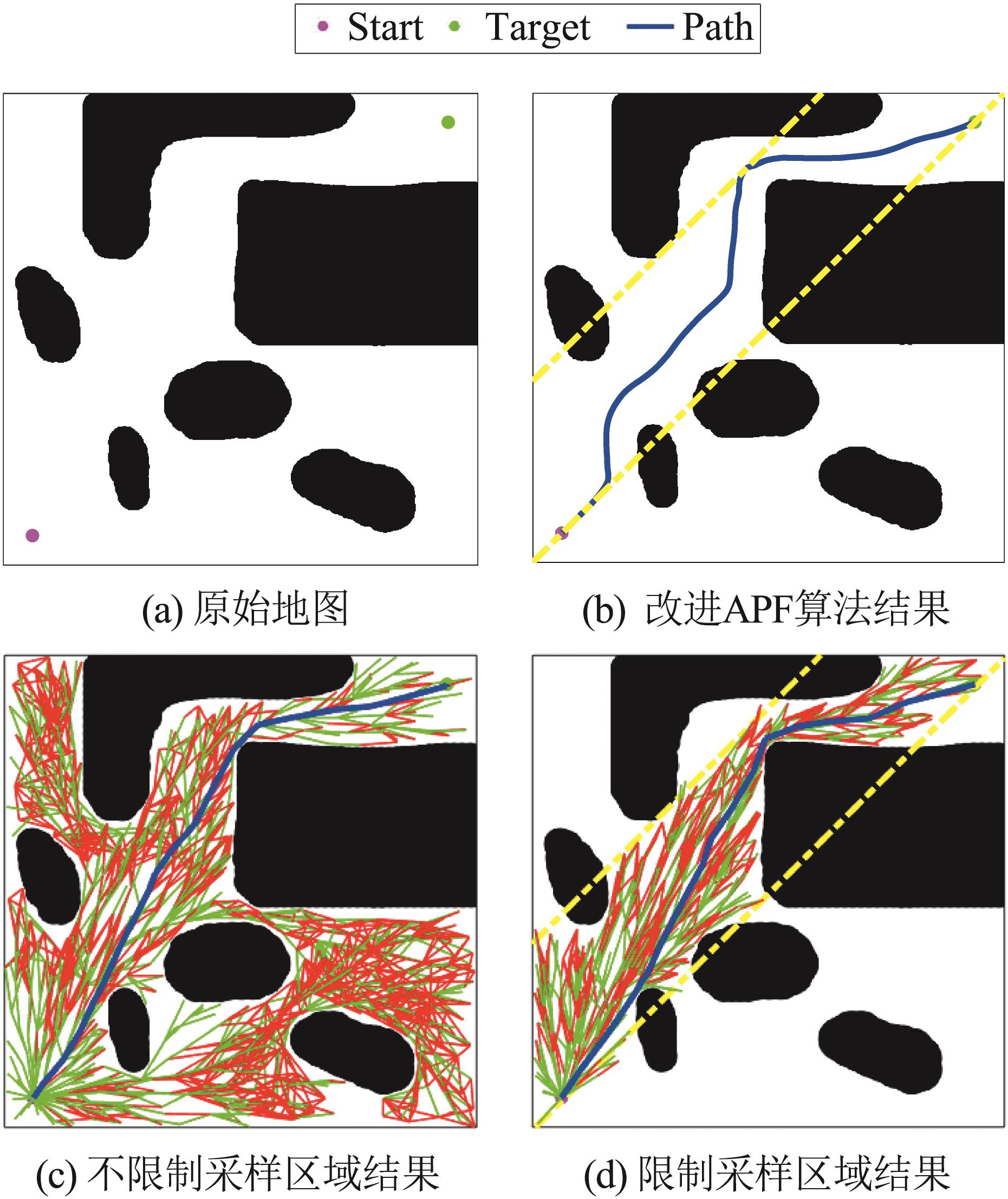
表1
RRT*算法改进前后实验数据
| 算法 | 时间/s | 采样点数 | 路径代价 | 首次发现路径迭代次数 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 最大 | 最小 | 平均 | 最大 | 最小 | 平均 | 最大 | 最小 | 平均 | 最大 | 最小 | 平均 | |
| RRT* | 54.07 | 50.91 | 53.18 | 1 166 | 1 097 | 1 082 | 1 071.6 | 1 060.8 | 1 065.3 | 1 026 | 521 | 788 |
| 改进RRT* | 22.83 | 20.53 | 21.60 | 559 | 540 | 552 | 1 070.5 | 1 063.3 | 1 067.2 | 648 | 347 | 493 |
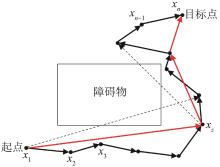
图11
冗余点去除过程
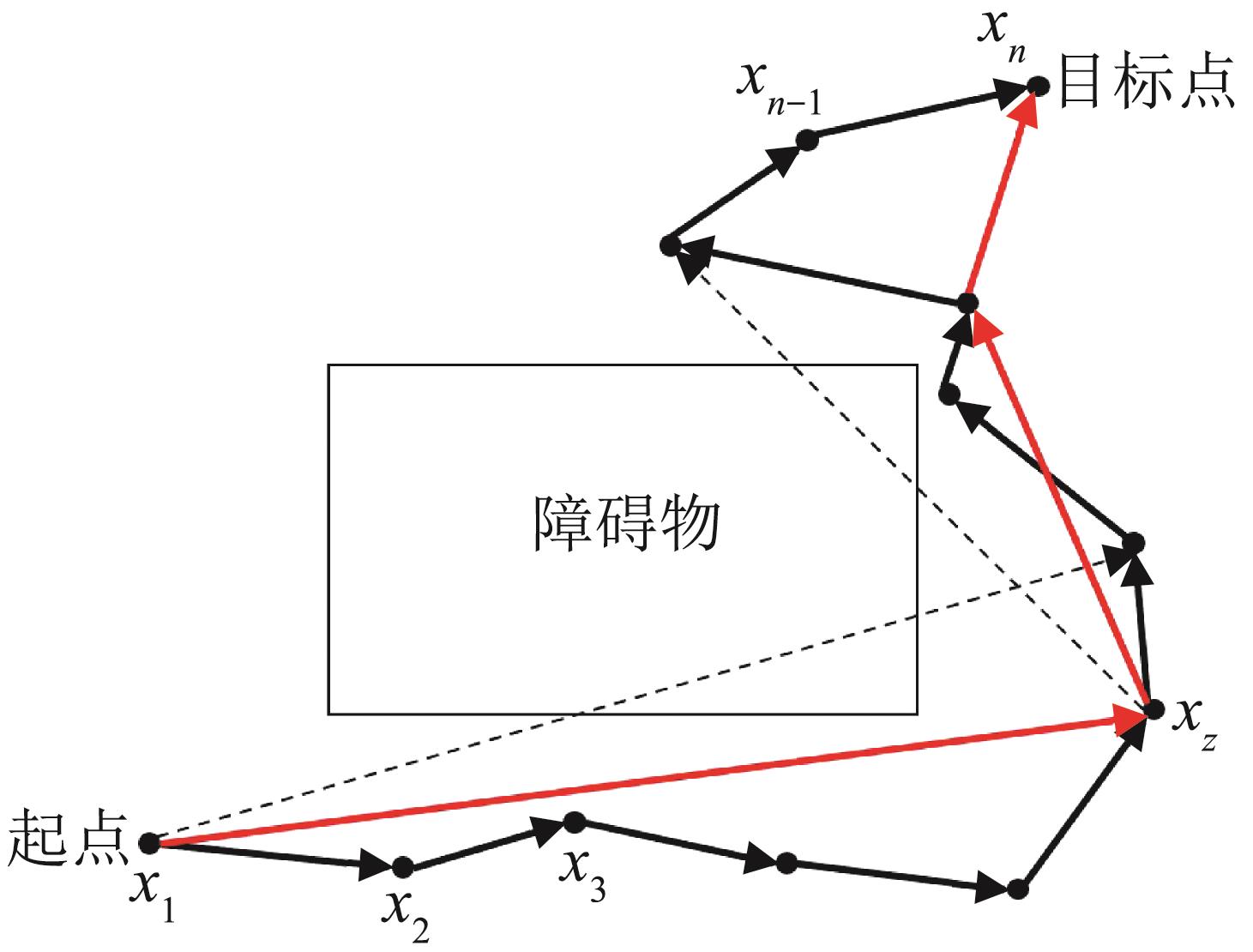
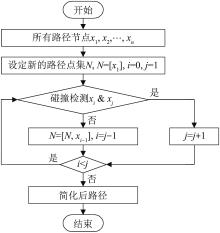
图12
路径优化算法流程图
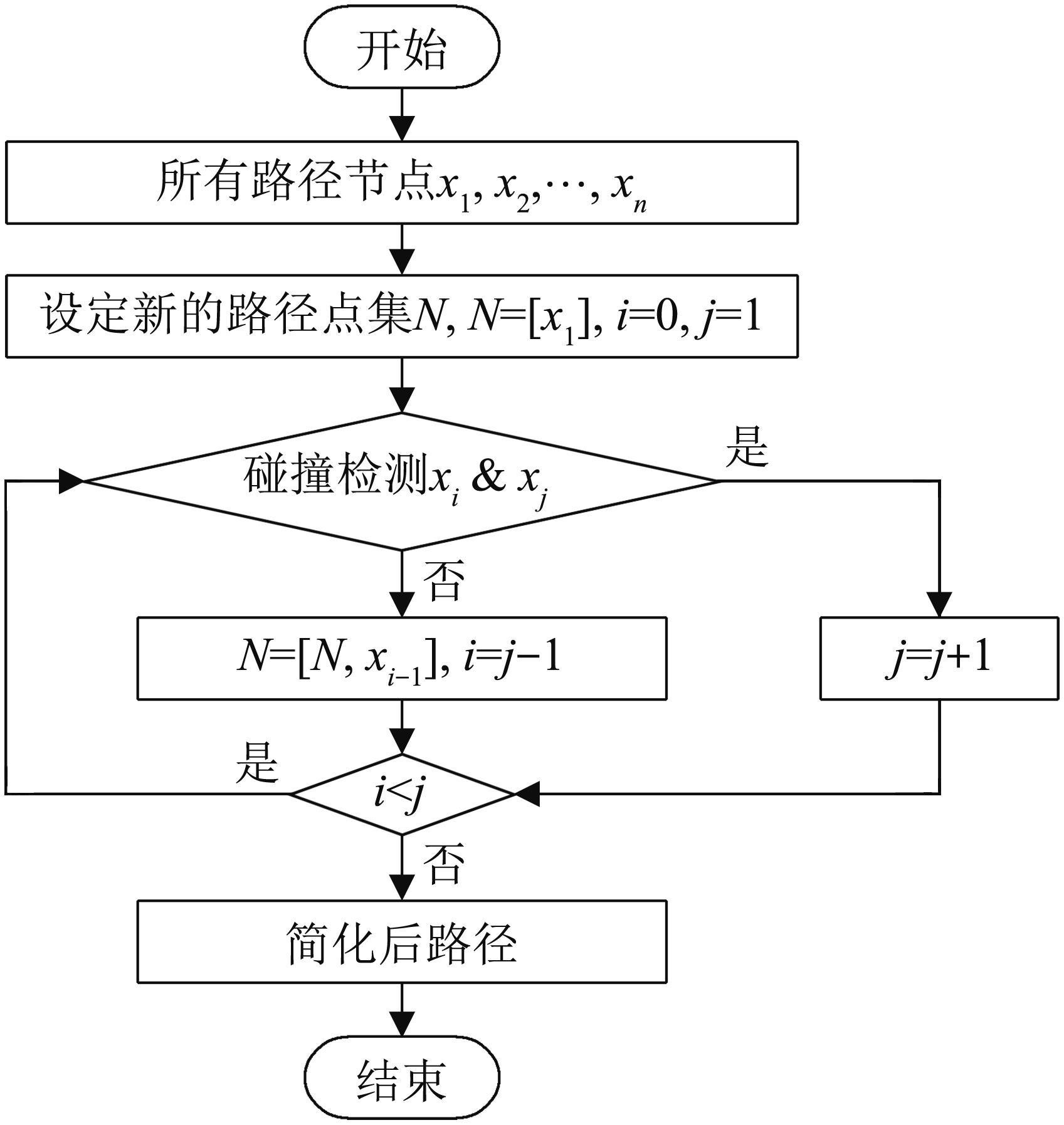
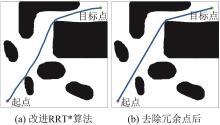
图13
冗余点去除仿真结果
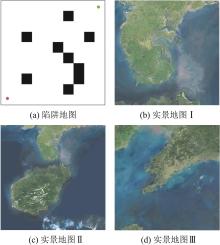
图14
4组地图
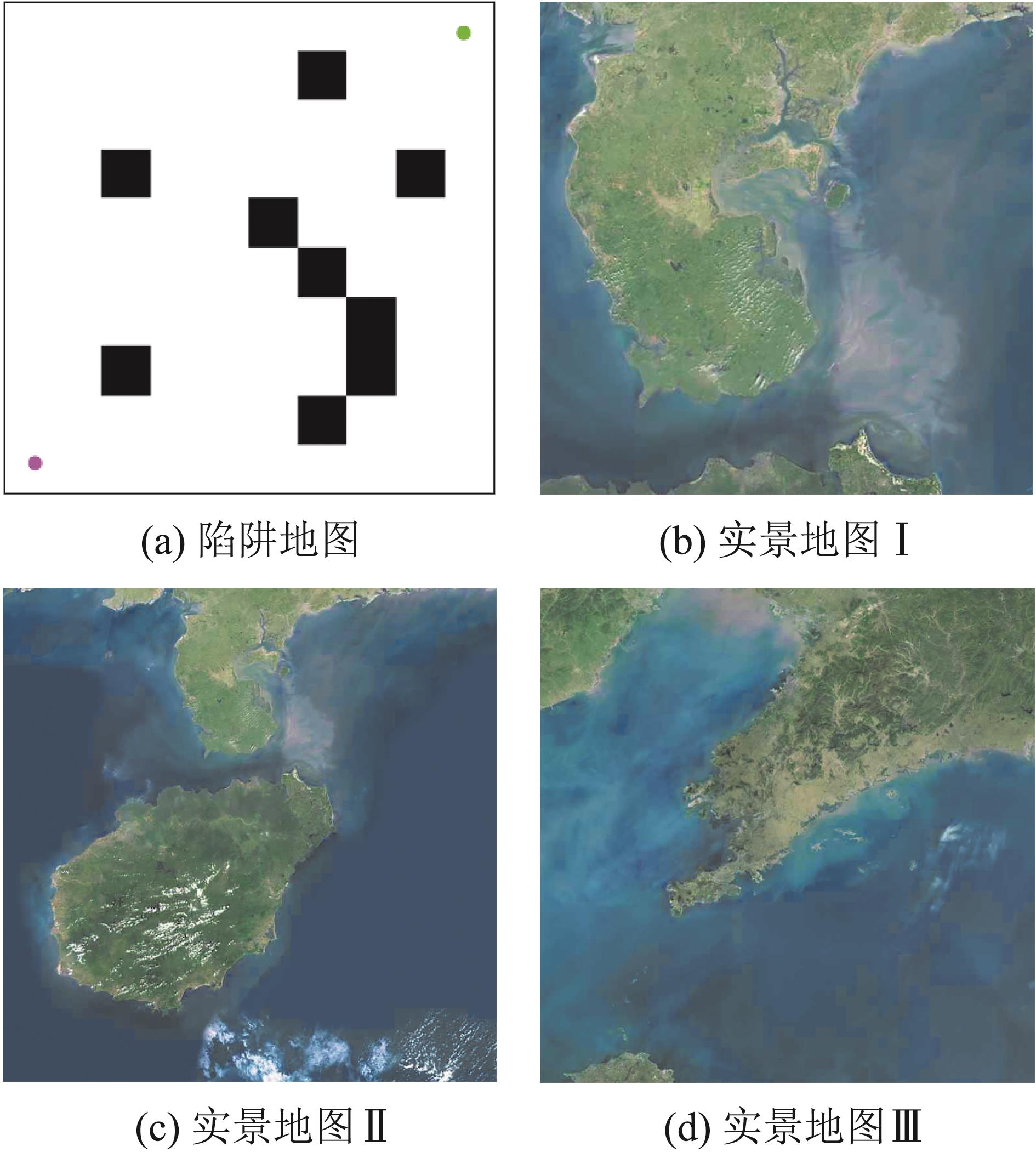

图15
第1个仿真地图实验结果
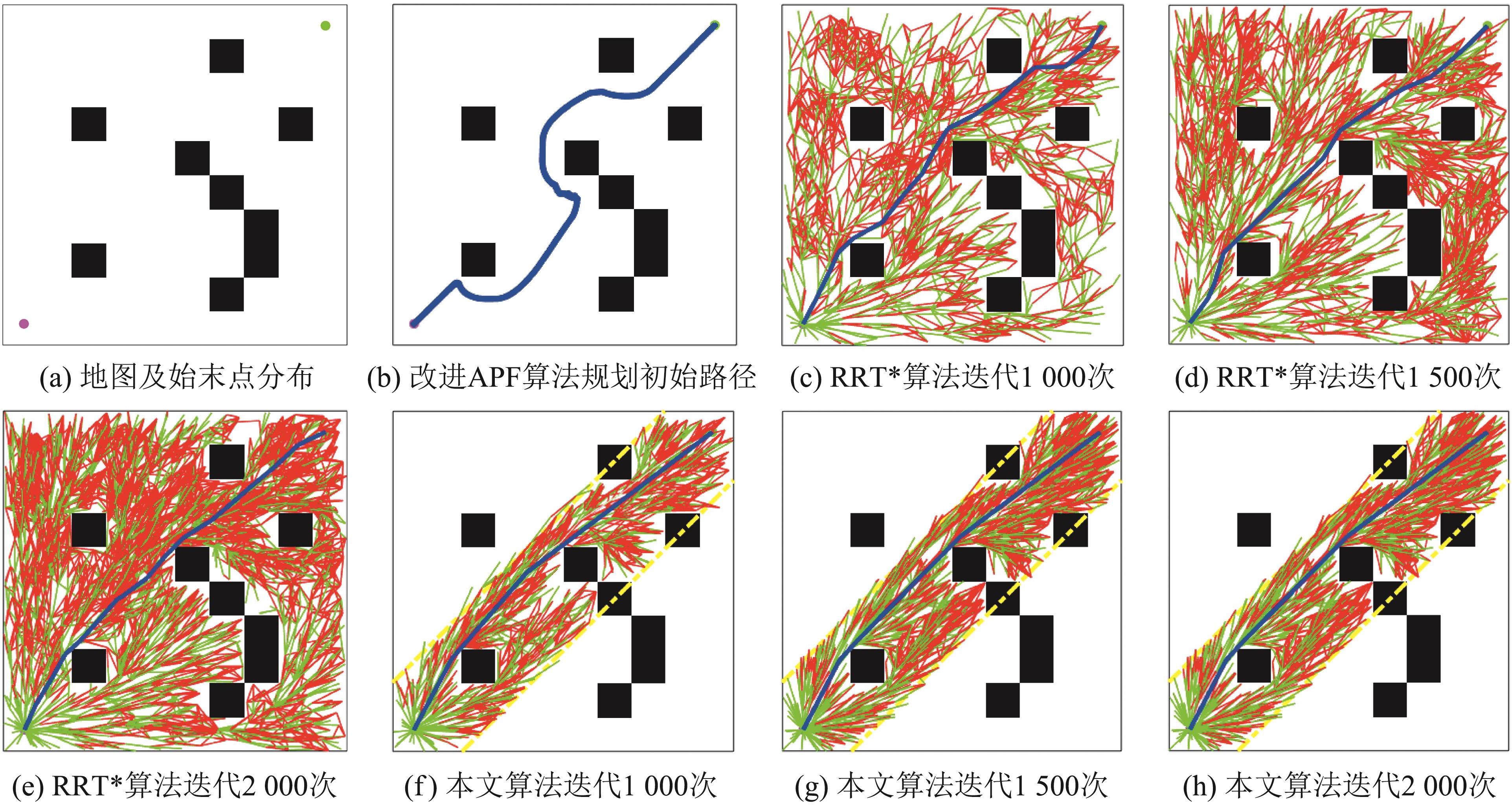
表2
仿真地图3种算法实验数据
| 算法 | 迭代 次数 | 首次发现路径迭代次数 | 采样点数 | 时间/s | 路径代价 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 最大 | 最小 | 平均 | 最大 | 最小 | 平均 | 最大 | 最小 | 平均 | 最大 | 最小 | 平均 | ||
| 改进APF | / | / | / | / | / | / | / | 1.27 | 1.04 | 1.17 | 1 322.43 | 1 322.43 | 1 322.43 |
| RRT* | 1 000 | 634 | 349 | 472 | 852 | 817 | 834 | 28.40 | 24.40 | 26.47 | 1 136.75 | 1 014.58 | 1 050.35 |
| 1 500 | 1 089 | 433 | 728 | 1 279 | 1 195 | 1 250 | 68.90 | 55.70 | 63.95 | 1 018.83 | 1 003.37 | 1 012.56 | |
| 2 000 | 1 170 | 348 | 626 | 1 711 | 1 628 | 1 670 | 117.80 | 109.30 | 113.88 | 1 115.69 | 1 006.74 | 1 010.29 | |
| APF-RRT* | 1 000 | 239 | 395 | 320 | 739 | 678 | 704 | 26.80 | 34.60 | 30.61 | 1 005.69 | 1 002.84 | 1 003.78 |
| 1 500 | 569 | 277 | 384 | 1 102 | 983 | 1 060 | 68.79 | 50.50 | 57.81 | 1 003.00 | 1 002.35 | 1 002.78 | |
| 2 000 | 432 | 225 | 326 | 1 477 | 1 433 | 1 457 | 112.60 | 108.10 | 110.91 | 1 004.05 | 1 001.32 | 1 002.42 | |

图16
三种算法在实景地图的实验结果
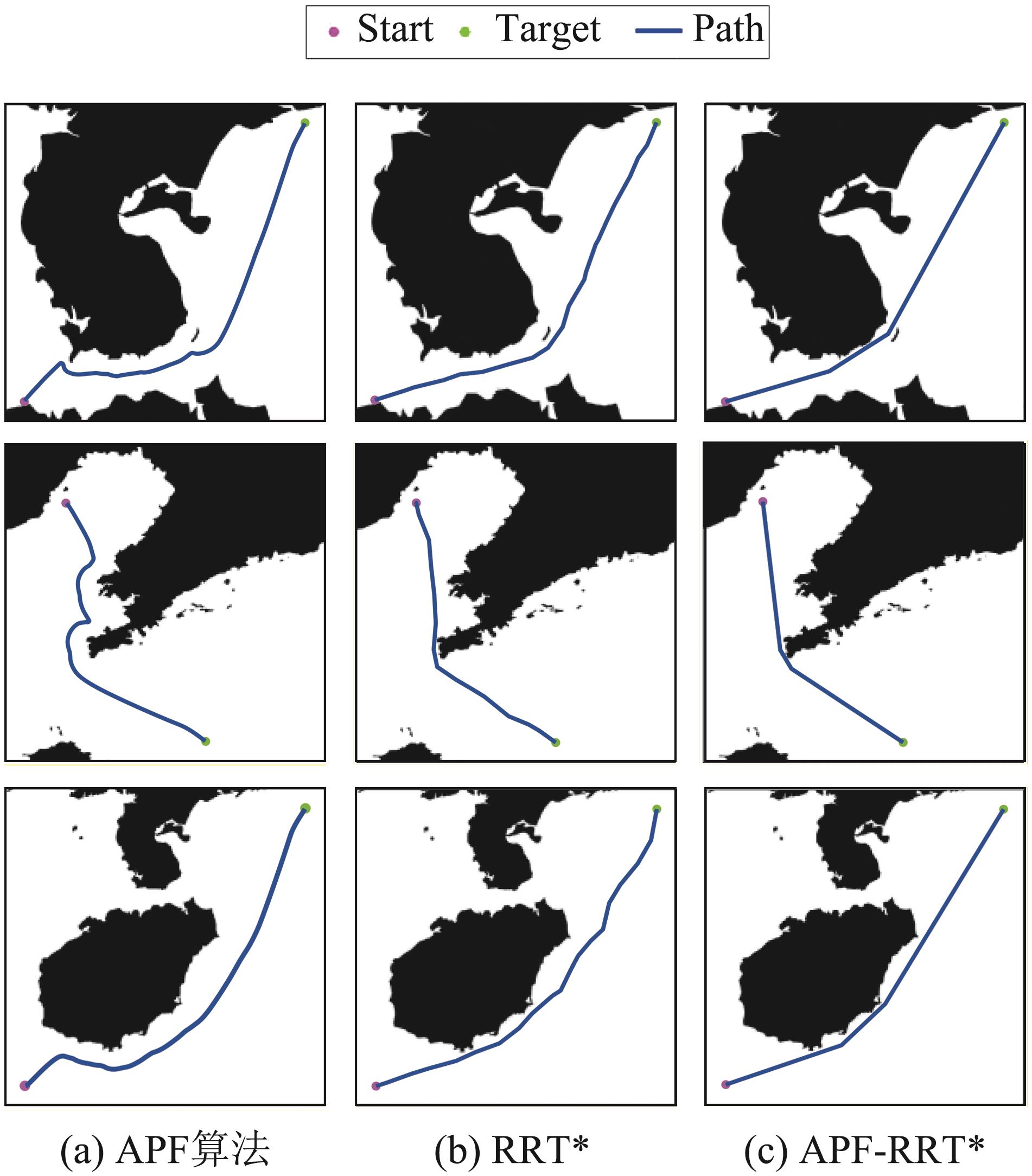
表3
实景地图中3种算法实验数据
| 地图 | 算法 | 迭代次数 | 时间/s | 采样点数 | 路径点数 | 路径 代价 |
|---|---|---|---|---|---|---|
| 实景I | 改进APF | / | 3.89 | / | / | 1 144.32 |
| RRT* | 2 000 | 41.13 | 1 019 | 22 | 1 085.62 | |
| APF-RRT* | 1 000 | 14.81 | 451 | 6 | 1 051.68 | |
| 实景II | 改进APF | / | 5.19 | / | / | 870.01 |
| RRT* | 2 000 | 81.17 | 1 197 | 16 | 768.04 | |
| APF-RRT* | 1 000 | 12.87 | 358 | 4 | 760.27 | |
| 实景III | 改进APF | / | 4.32 | / | / | 1 105.52 |
| RRT* | 2 000 | 95.03 | 1 309 | 21 | 1 046.20 | |
| APF-RRT* | 1 000 | 24.19 | 536 | 5 | 1 038.10 |
| 1 | Huang Yamin, Chen Linying, Chen Pengfei, et al. Ship Collision Avoidance Methods: State-of-the-art[J]. Safety Science, 2020, 121: 451-473. |
| 2 | Vagale Anete, Oucheikh Rachid, Bye Robin T, et al. Path Planning and Collision Avoidance for Autonomous Surface Vehicles I: A Review[J]. Journal of Marine Science and Technology, 2021, 26(4): 1292-1306. |
| 3 | Vagale Anete, Bye Robin T, Oucheikh Rachid, et al. Path Planning and Collision Avoidance for Autonomous Surface Vehicles II: A Comparative Study of Algorithms[J]. Journal of Marine Science and Technology, 2021, 26(4): 1307-1323. |
| 4 | Khatib O. Real-time Obstacle Avoidance for Manipulators and Mobile Robots[J]. The International Journal of Robotics Research, 1986, 5(1): 90-98. |
| 5 | Naeem W, Henrique S C, Hu Liang. A Reactive COLREGs-compliant Navigation Strategy for Autonomous Maritime Navigation[J]. IFAC-PapersOnLine, 2016, 49(23): 207-213. |
| 6 | Yaguchi Yuichi, Tamagawa Kyota. A Waypoint Navigation Method with Collision Avoidance Using an Artificial Potential Method on Random Priority[J]. Artificial Life and Robotics, 2020, 25(2): 278-285. |
| 7 | Hongguang Lü, Yin Yong. COLREGS-constrained Real-time Path Planning for Autonomous Ships Using Modified Artificial Potential Fields[J]. Journal of Navigation, 2019, 72(3), 72: 588-608. |
| 8 | Zhang Liang, Mou Junmin, Chen Pengfei, et al. Path Planning for Autonomous Ships: A Hybrid Approach Based on Improved APF and Modified VO Methods[J]. Journal of Marine Science and Engineering, 2021, 9(7): 761. |
| 9 | Li Lingyu, Wu Defeng, Huang Youqiang, et al. A Path Planning Strategy Unified with a COLREGS Collision Avoidance Function Based on Deep Reinforcement Learning and Artificial Potential Field[J]. Applied Ocean Research, 2021, 113: 102759. |
| 10 | LaValle S M. Rapidly-exploring Random Trees: A New Tool for Path Planning[J]. Research Report 9811, 1998. |
| 11 | Karaman S, Frazzoli E. Sampling-based Algorithms for Optimal Motion Planning[J]. The International Journal of Robotics Research, 2011, 30(7): 846-894. |
| 12 | LaValle S M. James J Kuffner Jr. Randomized Kinodynamic Planning[J]. The International Journal of Robotics Research, 2001, 20(5): 378-400. |
| 13 | J J Ir Kuffner, LaValle S M. RRT-connect: An Efficient Approach to Single-query Path Planning[C]//Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings. Piscataway, NJ, USA: IEEE, 2000: 995-1001. |
| 14 | Gammell Jonathan D, Srinivasa S S, Barfoot Timothy D. Informed RRT*: Optimal Sampling-based Path Planning Focused Via Direct Sampling of an Admissible Ellipsoidal Heuristic[C]//2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ, USA: IEEE, 2014: 2997-3004. |
| 15 | Chiang H T L, Tapia L. COLREG-RRT: An RRT-based COLREGS-compliant Motion Planner for Surface Vehicle Navigation[J]. IEEE Robotics and Automation Letters, 2018, 3(3): 2024-2031. |
| 16 | Enevoldsen Thomas T, Galeazzi Roberto. Grounding-aware RRT⁎ for Path Planning and Safe Navigation of Marine Crafts in Confined Waters[J]. IFAC-PapersOnLine, 2021, 54(16): 195-201. |
| 17 | Zaccone Raphael, Martelli Michele. A Collision Avoidance Algorithm for Ship Guidance Applications[J]. Journal of Marine Engineering & Technology, 2020, 19(S1): 62-75. |
| 18 | Chen Xinjia, Liu Yanxia, Hong Xiaobin, et al. Unmanned Ship Path Planning Based on RRT[C]//Intelligent Computing Theories and Application. Cham: Springer International Publishing, 2018: 102-110. |
| 19 | Yuan Chengren, Liu Guifeng, Zhang Wenqun, et al. An Efficient RRT Cache Method in Dynamic Environments for Path Planning[J]. Robotics and Autonomous Systems, 2020, 131: 103595. |
| 20 | Taheri Ehsan, Mohammad Hossein Ferdowsi, Danesh Mohammad. Closed-loop Randomized Kinodynamic Path Planning for an Autonomous Underwater Vehicle[J]. Applied Ocean Research, 2019, 83: 48-64. |
| 21 | Tahir Zaid, Qureshi A H, Ayaz Yasar, et al. Potentially Guided Bidirectionalized RRT* for Fast Optimal Path Planning in Cluttered Environments[J]. Robotics and Autonomous Systems, 2018, 108: 13-27. |
| 22 | 裴以建, 杨超杰, 杨亮亮. 基于改进RRT*的移动机器人路径规划算法[J]. 计算机工程, 2019, 45(5): 285-290, 297. |
| Pei Yijian, Yang Chaojie, Yang Liangliang. Path Planning Algorithm for Mobile Robot Based on Improved RRT* [J]. Computer Engineering, 2019, 45(5): 285-290, 297. | |
| 23 | Wang Xinyu, Li Xiaojuan, Yong Guan, et al. Bidirectional Potential Guided RRT* for Motion Planning[J]. IEEE Access, 2019, 7: 95046-95057. |
| 24 | Xi Yingqi, Shen Wei, Zhang Wen, et al. A Real-time Dynamic Path Planning Method Combining Artificial Potential Field Method and Biased Target RRT Algorithm[J]. Journal of Physics: Conference Series, 2021, 1905(1): 012015. |
| 25 | Zhu Jia, Zhao Shili, Zhao Ran. Path Planning for Autonomous Underwater Vehicle Based on Artificial Potential Field and Modified RRT[C]//2021 International Conference on Computer, Control and Robotics (ICCCR). Piscataway, NJ, USA: IEEE, 2021: 21-25. |
| 26 | Huang Shunyu. Path Planning Based on Mixed Algorithm of RRT and Artificial Potential Field Method[C]//2021 4th International Conference on Intelligent Robotics and Control Engineering (IRCE). Piscataway, NJ, USA: IEEE, 2021: 149-155. |
| 27 | Tang Xiaoya, Chen Feng. Robot Path Planning Algorithm Based on Bi-RRT and Potential Field[C]//2020 IEEE International Conference on Mechatronics and Automation (ICMA). Piscataway, NJ, USA: IEEE, 2020: 1251-1256. |
| 28 | Lu Yafei, Wu Anping, Chen Qingyang, et al. An Improved UAV Path Planning Method Based on RRT-APF Hybrid Strategy[C]//2020 5th International Conference on Automation, Control and Robotics Engineering (CACRE). Piscataway, NJ, USA: IEEE, 2020: 81-86. |
| 29 | An Hongrui, Hu Jiwei, Lou Ping. Obstacle Avoidance Path Planning Based on Improved APF and RRT[C]//2021 4th International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE). Piscataway, NJ, USA: IEEE, 2021: 1028-1032. |
| 30 | Yuan Qingni, Yi Junhui, Sun Ruitong, et al. Path Planning of a Mechanical Arm Based on an Improved Artificial Potential Field and a Rapid Expansion Random Tree Hybrid Algorithm[J]. Algorithms, 2021, 14(11): 321. |
| 31 | Gammell Jonathan D, Srinivasa S S, Barfoot Timothy D. Batch Informed Trees (BIT*): Sampling-based Optimal Planning Via the Heuristically Guided Search of Implicit Random Geometric Graphs[C]//2015 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2015: 3067-3074. |
| 32 | Choudhury S, Gammell Jonathan D, Barfoot Timothy D, et al. Regionally Accelerated Batch Informed Trees (RABIT*): A Framework to Integrate Local Information into Optimal Path Planning[C]//2016 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2016: 4207-4214. |
| 33 | Sagar Suhas Joshi, Panagiotis Tsiotras. Non-parametric Informed Exploration for Sampling-based Motion Planning[C]//2019 International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2019: 5915-5921. |
| 34 | Thomas Thuesen Enevoldsen, Reinartz Christopher, Galeazzi Roberto. COLREGs-informed RRT* for Collision Avoidance of Marine Crafts[C]//2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2021: 8083-8089. |
| 35 | Li Chenming, Wang Chaoqun, Wang Jiankun, et al. Sliding-window Informed RRT*: A Method for Speeding up the Optimization and Path Smoothing[C]//2021 IEEE International Conference on Real-time Computing and Robotics (RCAR). Piscataway, NJ, USA: IEEE, 2021: 141-146. |
| 36 | Yi Daqing, Thakker R, Gulino C, et al. Generalizing Informed Sampling for Asymptotically-optimal Sampling-based Kinodynamic Planning Via Markov Chain Monte Carlo[C]//2018 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2018: 7063-7070. |
| 37 | Gustavo D O Véras Luiz, L L Medeiros Felipe, N F Guimaráes Lamartine. Systematic Literature Review of Sampling Process in Rapidly-exploring Random Trees[J]. IEEE Access, 2019, 7: 50933-50953. |
| 38 | 曹凯, 陈阳泉, 高嵩, 等. 涡流人工势场引导下的RRT*移动机器人路径规划[J]. 计算机科学与探索, 2021, 15(4): 723-732. |
| Cao Kai, Chen Yangquan, Gao Song, et al. Vortex Artificial-potential-field Guided RRT* for Path Planning of Mobile Robot[J]. Journal of Frontiers of Computer Science & Technology, 2021, 15(4): 723-732. |
| [1] | 梁隆硝, 毛剑琳, 王妮娅, 房程远, 周雯娜. 最小规划裕量优先的多机器人CBS路径规划算法[J]. 系统仿真学报, 2026, 38(5): 1159-1173. |
| [2] | 孟文龙, 濮彦博, 龚亚. 未知环境下融合局部-全局策略的AUV路径规划[J]. 系统仿真学报, 2026, 38(4): 889-902. |
| [3] | 李德权, 熊婉. 基于SAC3Q-HDM的强化学习机器人路径规划[J]. 系统仿真学报, 2026, 38(3): 714-724. |
| [4] | 谢俊, 张琦, 彭延云, 石浩楠, 李东阳, 刘熙. 基于无碰撞轨迹的无人机路径规划方法研究[J]. 系统仿真学报, 2026, 38(3): 808-817. |
| [5] | 朱玲, 李靖, 张朝辉. 基于改进REA*算法的机器人自适应路径规划[J]. 系统仿真学报, 2026, 38(2): 332-345. |
| [6] | 王秉坤, 王越, 杨妹, 张鹏年, 樊浡昊, 唐杰. 基于改进近端策略优化算法的无人车打击策略规划方法[J]. 系统仿真学报, 2026, 38(2): 372-386. |
| [7] | 于逸然, 赖惠成, 高古学, 张过, 彭汪忆楠, 杨龙飞, 黄俊豪. 基于遗传算法和A*算法的多农机协同作业优化方法[J]. 系统仿真学报, 2025, 37(9): 2397-2408. |
| [8] | 倪培龙, 毛鹏军, 王宁, 杨孟杰. 基于改进A-DDQN算法的机器人路径规划[J]. 系统仿真学报, 2025, 37(9): 2420-2430. |
| [9] | 张凯翔, 毛剑琳, 王妮娅, 徐志昊. 针对路径干扰的多机器人分层协作k鲁棒路径规划[J]. 系统仿真学报, 2025, 37(8): 2074-2088. |
| [10] | 万宇航, 朱子璐, 钟春富, 刘永奎, 林廷宇, 张霖. 基于改进PPO算法的机械臂动态路径规划[J]. 系统仿真学报, 2025, 37(6): 1462-1473. |
| [11] | 叶晨, 邵鹏, 张少平, 李文婷, 周腾明. 面向移动机器人路径规划的增强型人工大猩猩算法[J]. 系统仿真学报, 2025, 37(6): 1474-1485. |
| [12] | 张艳, 李炳华, 霍涛, 刘榕. 融合改进A*算法与DWA算法的机器人动态避障方法研究[J]. 系统仿真学报, 2025, 37(6): 1555-1564. |
| [13] | 周晓晖, 李研强, 王勇, 赵德财, 杨逍瑶. 基于双启发式信息蚁群算法的机器人路径规划[J]. 系统仿真学报, 2025, 37(5): 1280-1289. |
| [14] | 喻蝶, 鲍柏仲, 司言, 段暕, 詹小斌, 史铁林. 基于搜索步优化A*算法的移动机器人路径规划[J]. 系统仿真学报, 2025, 37(4): 1041-1050. |
| [15] | 张森, 代强强. 改进型深度确定性策略梯度的无人机路径规划[J]. 系统仿真学报, 2025, 37(4): 875-881. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
