| 1 |
林彬, 韩光辉, 宋晨晨, 等. 基于辐射扫描算法的机器人路径规划与仿真[J]. 系统仿真学报, 2021, 33(1): 84-90.
|
|
Lin Bin, Han Guanghui, Song Chenchen, et al. Traversal Path Planning and Simulation of Robot Based on Radiation Scanning[J]. Journal of System Simulation, 2021, 33(1): 84-90.
|
| 2 |
朱大奇, 朱婷婷, 颜明重. 基于改进神经网络的多AUV全覆盖路径规划[J]. 系统仿真学报, 2020, 32(8): 1505-1514.
|
|
Zhu Daqi, Zhu Tingting, Yan Mingzhong. Multi-AUV Complete Coverage Path Planning Based on Improved Neural Network[J]. Journal of System Simulation, 2020, 32(8): 1505-1514.
|
| 3 |
白天翔, 王帅, 沈震, 等. 平行机器人与平行无人系统:框架、结构、过程、平台及其应用[J]. 自动化学报, 2017, 43(2): 161-175.
|
|
Bai Tianxiang, Wang Shuai, Shen Zhen, et al. Parallel Robotics and Parallel Unmanned Systems: Framework, Structure, Process, Platform and Applications[J]. Acta Automatica Sinica, 2017, 43(2): 161-175.
|
| 4 |
吴鹏, 桑成军, 陆忠华, 等. 基于改进A*算法的移动机器人路径规划研究[J]. 计算机工程与应用, 2019, 55(21): 226-232, 269.
|
|
Wu Peng, Sang Chengjun, Lu Zhonghua, et al. Research on Mobile Robot Path Planning Based on Improved A* Algorithm[J]. Computer Engineering and Applications, 2019, 55(21): 226-232, 269.
|
| 5 |
陈继清, 谭成志, 莫荣现, 等. 基于人工势场的A*算法的移动机器人路径规划[J]. 计算机科学, 2021, 48(11): 327-333.
|
|
Chen Jiqing, Tan Chengzhi, Mo Rongxian, et al. Path Planning of Mobile Robot with A* Algorithm Based on Artificial Potential Field[J]. Computer Science, 2021, 48(11): 327-333.
|
| 6 |
阮晓钢, 周静, 张晶晶, 等. 基于子目标搜索的机器人目标导向RRT路径规划算法[J]. 控制与决策, 2020, 35(10): 2543-2548.
|
|
Ruan Xiaogang, Zhou Jing, Zhang Jingjing, et al. Robot Goal Guide RRT Path Planning Based on Sub-target Search[J]. Control and Decision, 2020, 35(10): 2543-2548.
|
| 7 |
张毅, 李奎, 黄超. 基于改进蚁群算法的二维码移动机器人路径规划方法[J]. 重庆邮电大学学报(自然科学版), 2021, 33(3): 491-497.
|
|
Zhang Yi, Li Kui, Huang Chao. Path Planning Method for Two-dimensional Code Mobile Robot Based on Improved Ant Colony Algorithm[J]. Journal of Chongqing University of Posts and Telecommunications(Natural Science Edition), 2021, 33(3): 491-497.
|
| 8 |
Xin Junfeng, Zhong Jiabao, Yang Fengru, et al. An Improved Genetic Algorithm for Path-planning of Unmanned Surface Vehicle[J]. Sensors, 2019, 19(11): 2640.
|
| 9 |
王霄汉, 张霖, 任磊, 等. 基于强化学习的车间调度问题研究简述[J]. 系统仿真学报, 2021, 33(12): 2782-2791.
|
|
Wang Xiaohan, Zhang Lin, Ren Lei, et al. Brief Review on Applying Reinforcement Learning to Job Shop Scheduling Problems[J]. Journal of System Simulation, 2021, 33(12): 2782-2791.
|
| 10 |
Gao Junli, Ye Weijie, Guo Jing, et al. Deep Reinforcement Learning for Indoor Mobile Robot Path Planning[J]. Sensors, 2020, 20(19): 5493.
|
| 11 |
王毅然, 经小川, 田涛, 等. 基于强化学习的多Agent路径规划方法研究[J]. 计算机应用与软件, 2019, 36(8): 165-171.
|
|
Wang Yiran, Jing Xiaochuan, Tian Tao, et al. Multi-agent Path Planning Based on Reinforcement Learning[J]. Computer Applications and Software, 2019, 36(8): 165-171.
|
| 12 |
Watkins C J C H, Dayan P. Q-learning[J]. Machine Learning, 1992, 8(3): 279-292.
|
| 13 |
Mao Chao, Shen Zuojun. A Reinforcement Learning Framework for the Adaptive Routing Problem in Stochastic Time-dependent Network[J]. Transportation Research Part C: Emerging Technologies, 2018, 93: 179-197.
|
| 14 |
Mnih V, Kavukcuoglu K, Silver D, et al. Human-level Control Through Deep Reinforcement Learning[J]. Nature, 2015, 518(7540): 529-533.
|
| 15 |
Chua L. Memristor-the Missing Circuit Element[J]. IEEE Transactions on Circuit Theory, 1971, 18(5): 507-519.
|
| 16 |
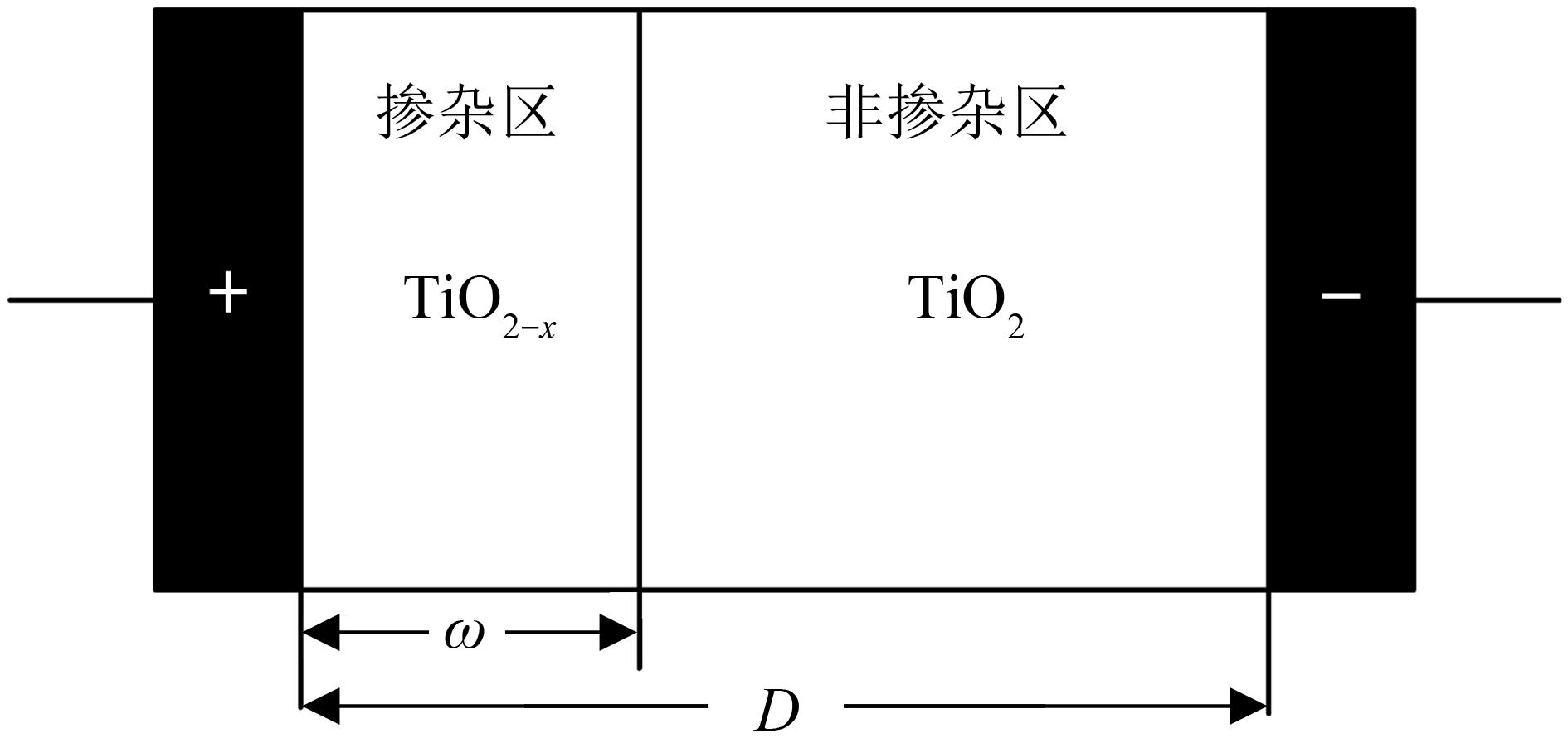
Li Can, Belkin D, Li Yunning, et al. Efficient and Self-adaptive in-situ Learning in Multilayer Memristor Neural Networks[J]. Nature Communications, 2018, 9(1): 2385.
|
| 17 |
Wang Zhongrui, Li Can, Song Wenhao, et al. Reinforcement Learning With Analogue Memristor Arrays[J]. Nature Electronics, 2019, 2(3): 115-124.
|
| 18 |
张耀中, 胡小方, 周跃, 等. 基于多层忆阻脉冲神经网络的强化学习及应用[J]. 自动化学报, 2019, 45(8): 1536-1547.
|
|
Zhang Yaozhong, Hu Xiaofang, Zhou Yue, et al. A Novel Reinforcement Learning Algorithm Based on Multilayer Memristive Spiking Neural Network With Applications[J]. Acta Automatica Sinica, 2019, 45(8): 1536-1547.
|
| 19 |
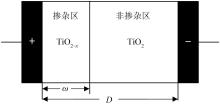
Strukov D B, Snider G S, Stewart D R, et al. The Missing Memristor Found[J]. Nature, 2008, 453(7191): 80-83.
|
| 20 |
Joglekar Y N, Wolf S J. The Elusive Memristor: Properties of Basic Electrical Circuits[J]. European Journal of Physics, 2009, 30(4): 661.
|
| 21 |
段书凯, 胡小方, 王丽丹, 等. 忆阻器阻变随机存取存储器及其在信息存储中的应用[J]. 中国科学(信息科学), 2012, 42(6): 754-769.
|
|
Duan Shukai, Hu Xiaofang, Wang Lidan, et al. Memristor-based RRAM With Applications[J]. Scientia Sinica(Informationis), 2012, 42(6): 754-769.
|
| 22 |
王雷, 石鑫. 基于改进蚁群算法的移动机器人动态路径规划[J]. 南京理工大学学报, 2019, 43(6): 700-707.
|
|
Wang Lei, Shi Xin. Dynamic Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm[J]. Journal of Nanjing University of Science and Technology, 2019, 43(6): 700-707.
|
| 23 |
Wang Binyu, Liu Zhe, Li Qingbiao, et al. Mobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement Learning[J]. IEEE Robotics and Automation Letters, 2020, 5(4): 6892-6939.
|
| 24 |
胡飞, 尤志强, 刘鹏, 等. 基于忆阻器交叉阵列的卷积神经网络电路设计[J]. 计算机研究与发展, 2018, 55(5): 1097-1107.
|
|
Hu Fei, You Zhiqiang, Liu Peng, et al. Circuit Design of Convolutional Neural Network Based on Memristor Crossbar Arrays[J]. Journal of Computer Research and Development, 2018, 55(5): 1097-1107.
|
 ), 祁永强1(
), 祁永强1(