

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (4): 932-947.doi: 10.16182/j.issn1004731x.joss.24-0935
•
Wang Jun1, Liu Min1, Zhang Xiaochuan1, Ding Yishan2, Feng Juhui3, Zhuang Ye3
Received:2024-08-23
Revised:2024-12-18
Online:2026-04-20
Published:2026-04-22
Contact:
Liu Min
CLC Number:
Wang Jun, Liu Min, Zhang Xiaochuan, Ding Yishan, Feng Juhui, Zhuang Ye. Modelling Method of Unmanned Vehicle Dynamics Based on Neural Network[J]. Journal of System Simulation, 2026, 38(4): 932-947.
Fig. 1
Process of neural network construction for unmanned vehicle dynamics
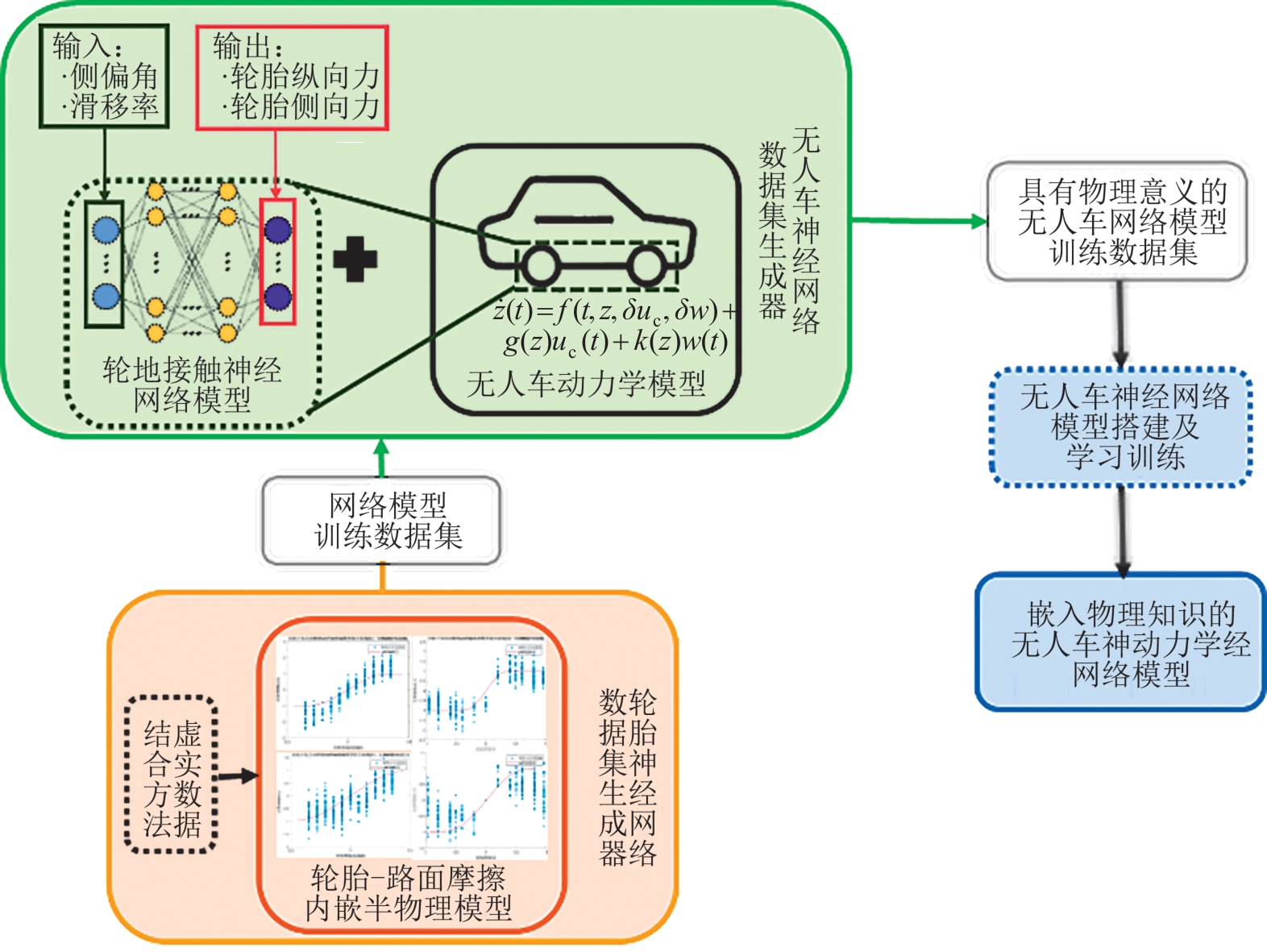
Fig. 2
Single-wheel soil trench test model
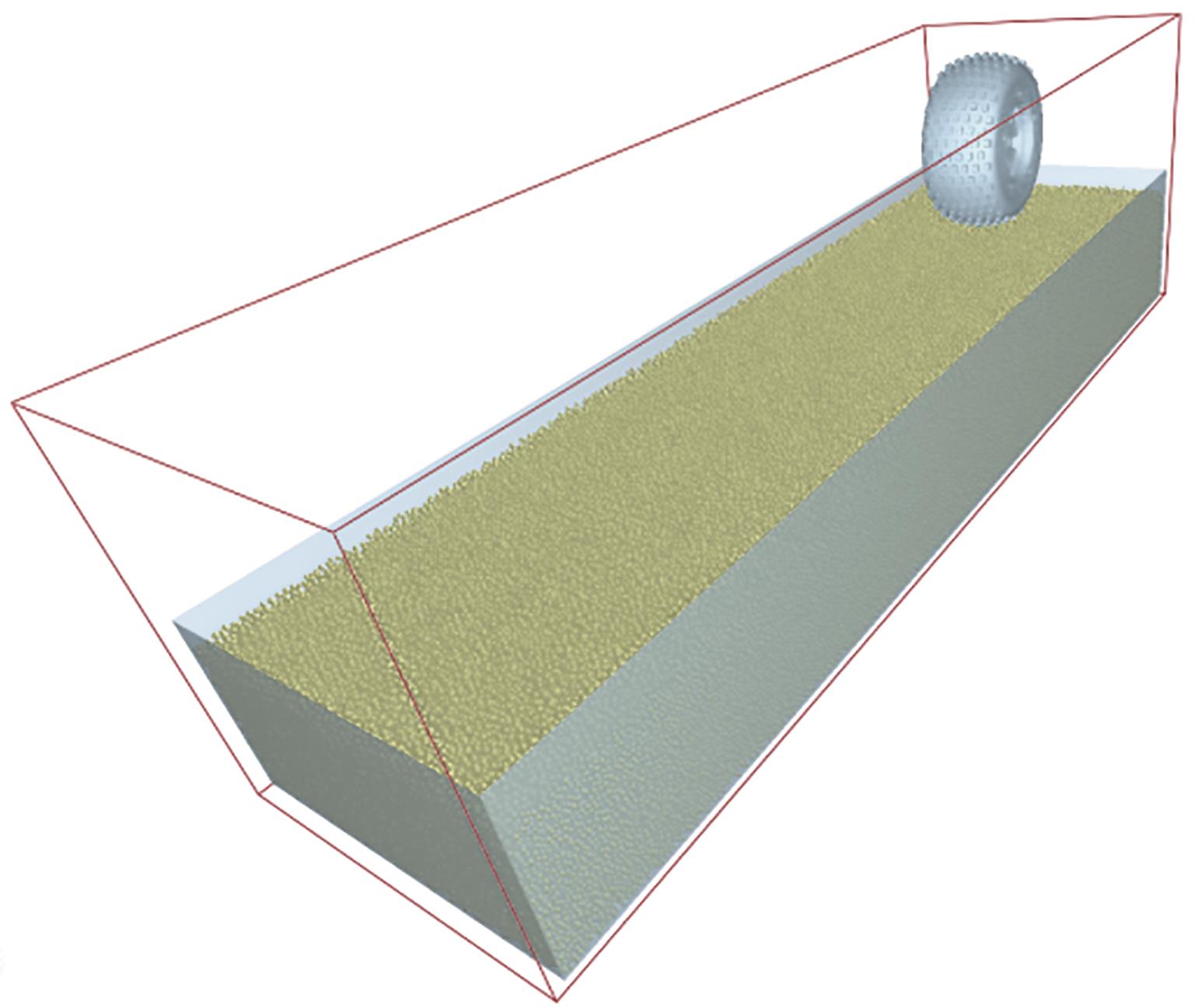
Table 1
Sand and clay soil parameters
| 参数 | 沙土颗粒 | 粘土颗粒 |
|---|---|---|
| 形状 | 球形 | 球形 |
| 半径/mm | 2 | 2 |
| 密度/(kg/m3) | 2 100 | 1 550 |
| 剪切模量/MPa | 83 | 16.5 |
| 泊松比 | 0.25 | 0.25 |
| 颗粒-颗粒恢复系数 | 0.48 | 0.58 |
| 颗粒-颗粒静摩擦系数 | 0.51 | 1.21 |
| 颗粒-颗粒动摩擦系数 | 0.71 | 0.13 |
| 颗粒-几何体恢复系数 | 0.5 | 0.48 |
| 颗粒-几何体静摩擦系数 | 0.5 | 0.55 |
| 颗粒-几何体动摩擦系数 | 0.3 | 0.37 |
| 含水量/% | 15 | 55 |
| 变形模量 | 0.7 | 0.4 |
| 内聚模量/(kN/m n+1) | 5.27 | 16.03 |
| 摩擦模量/(kN/m n+1) | 1 515.04 | 126.53 |
| 粘聚力/kPa | 1.72 | 2.07 |
| 内摩擦角/(°) | 34 | 10 |
| 厚度/mm | 300 | 300 |
Fig. 3
Longitudinal slip and sideslip characteristics of tires on sand and mud
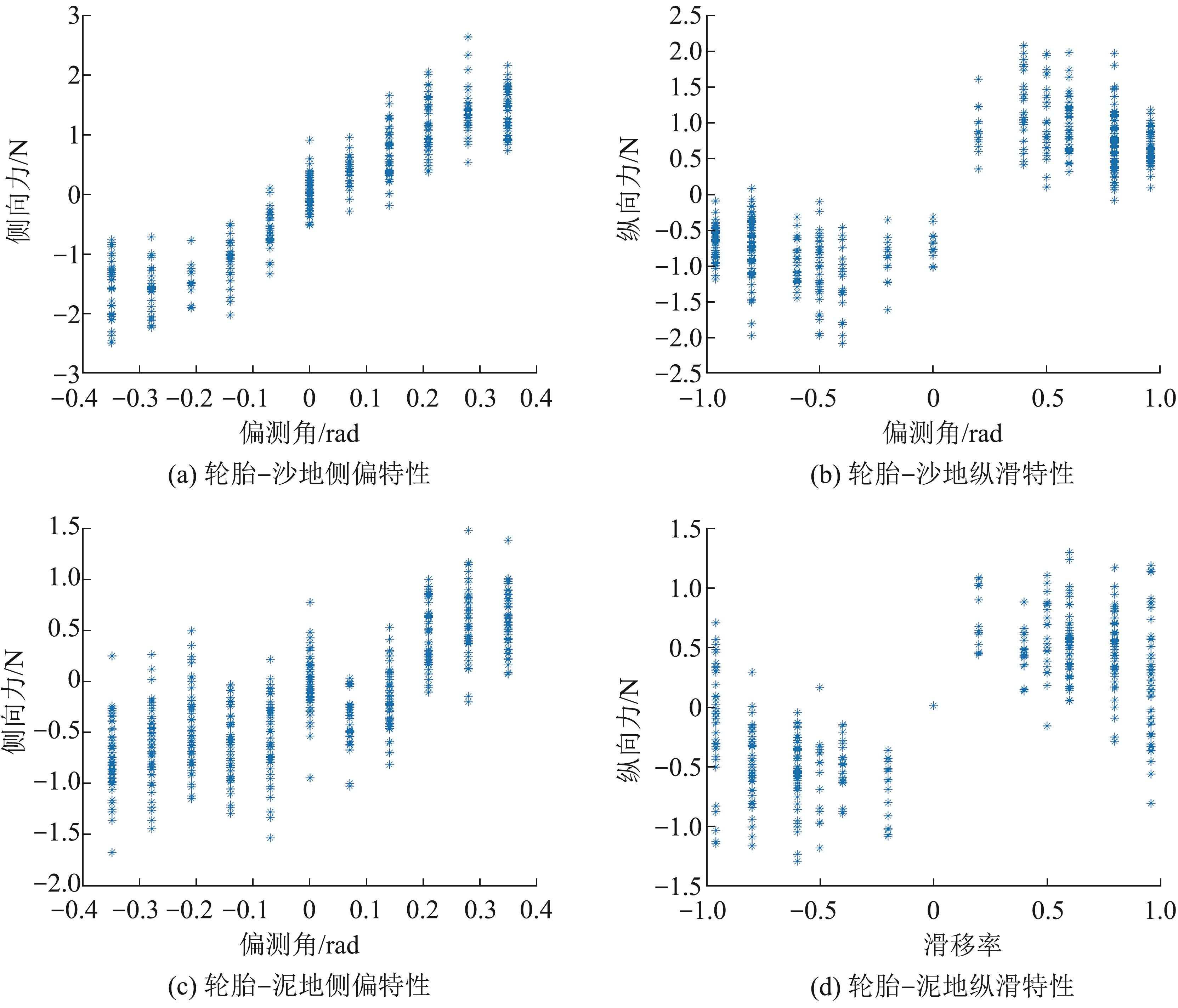
Fig. 4
Fitting results of Savkoor friction constitutive model
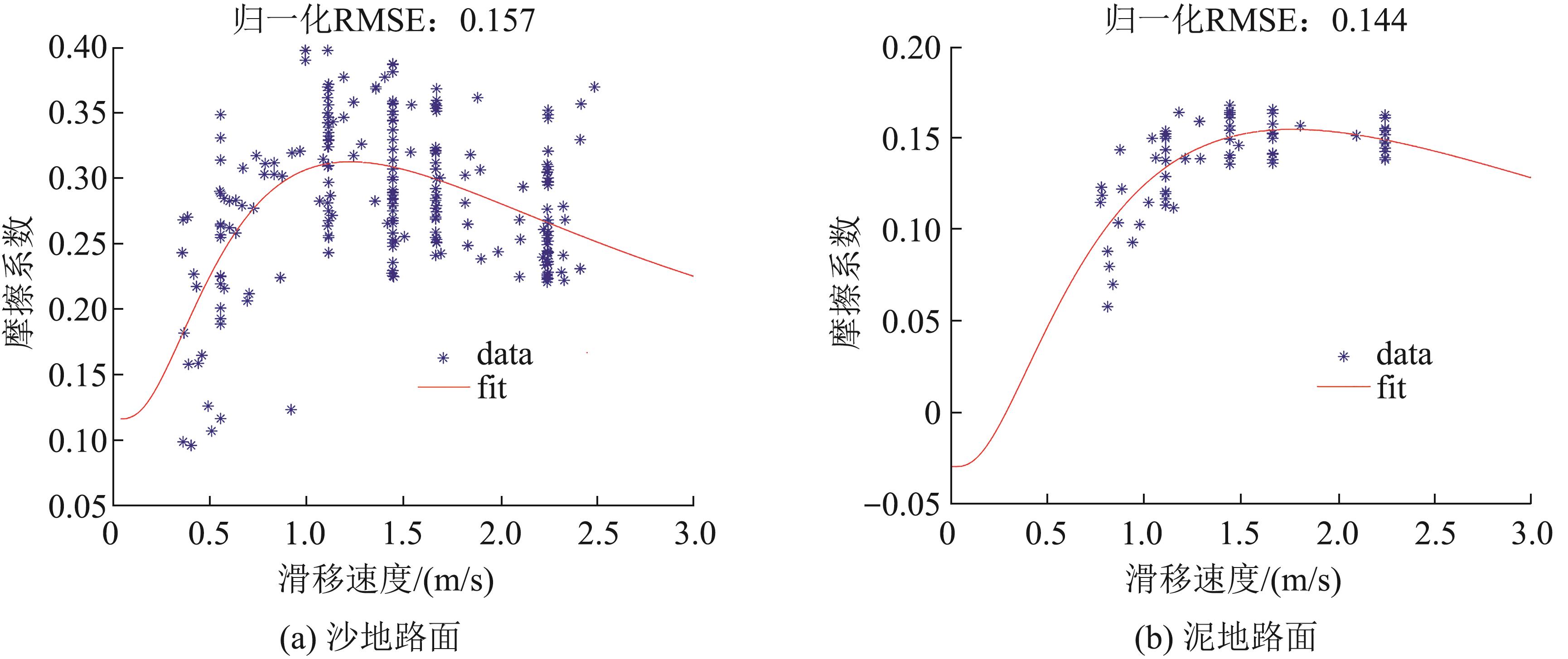

Fig. 5
Mutual prediction of mechanical properties of different tire models based on normalization technology
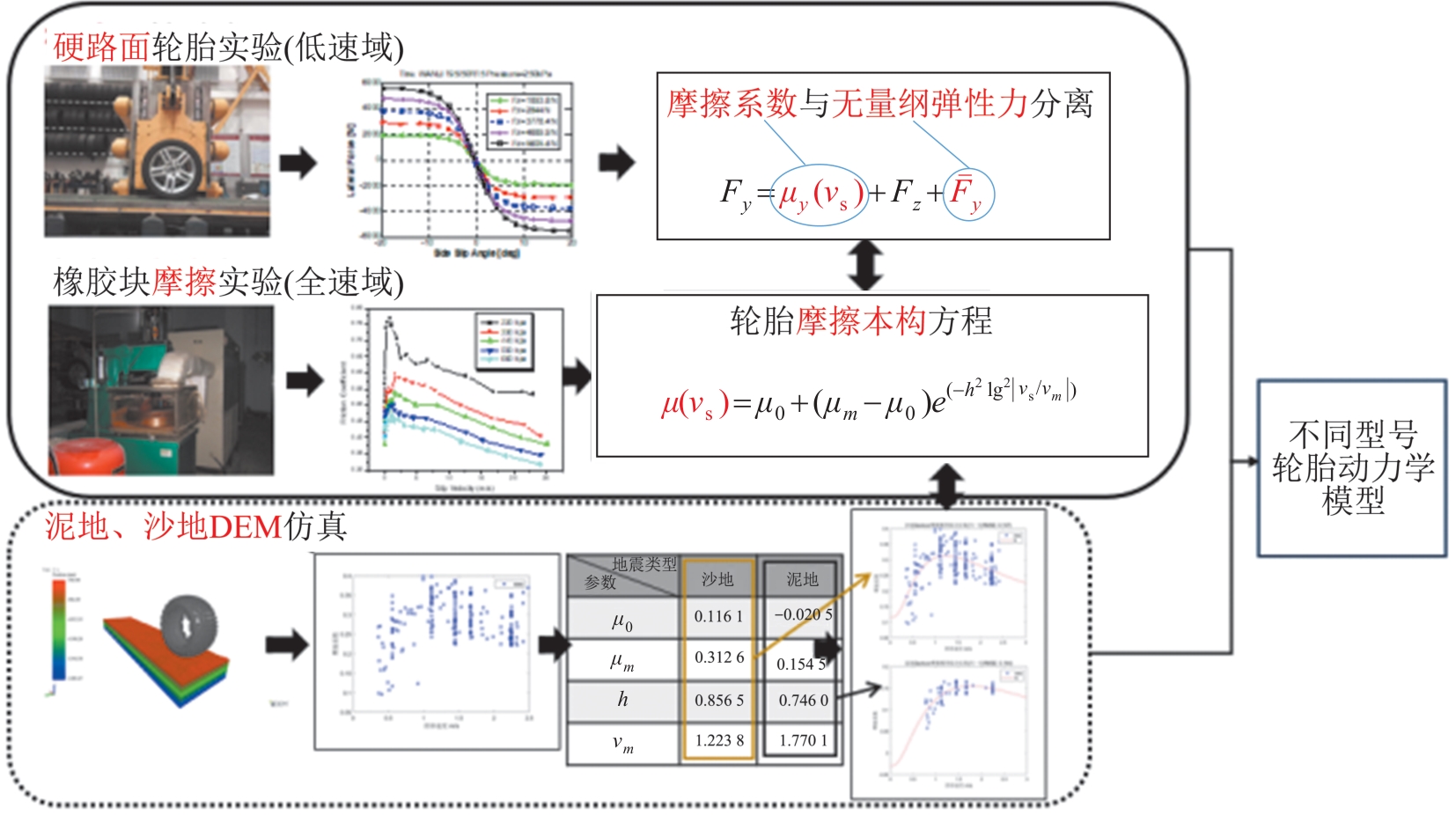

Fig. 6
Fitting results of tire side deviation force on different terrains
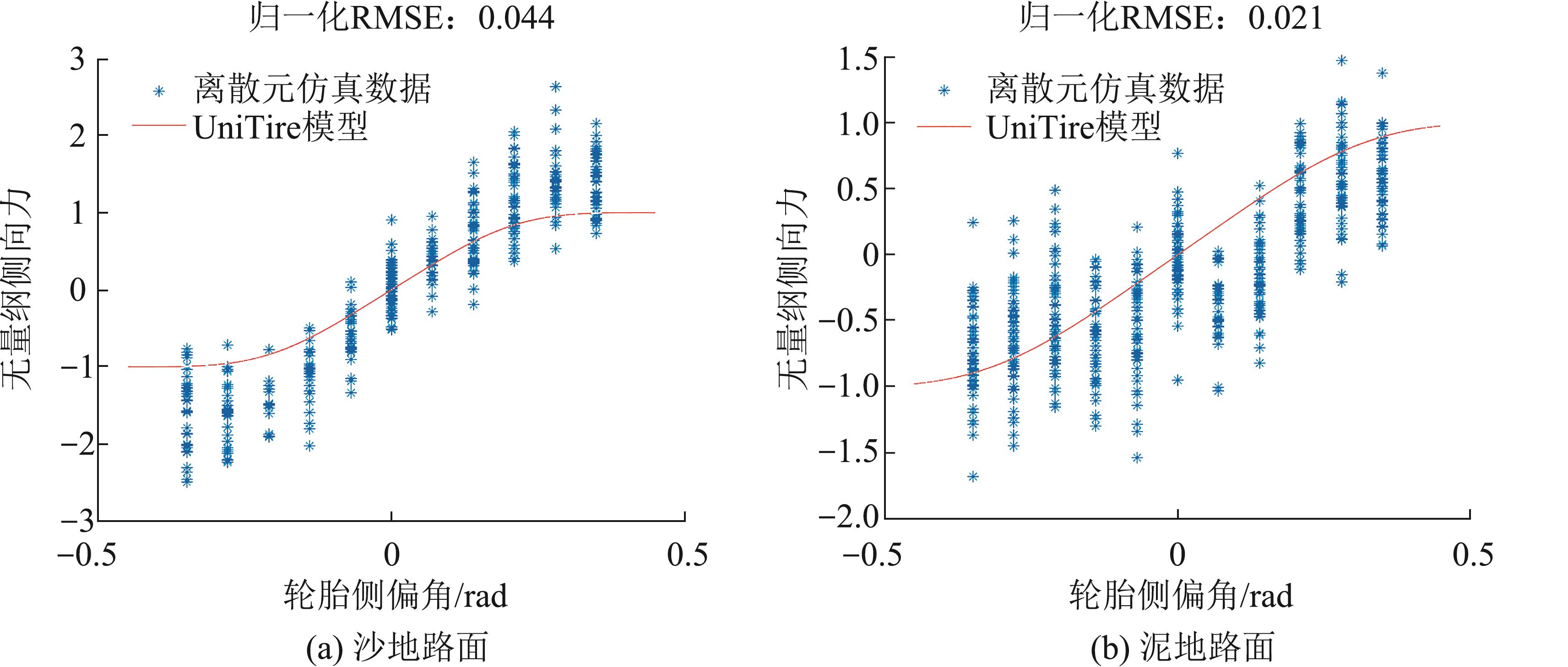

Fig. 7
Fitting results of longitudinal slip force of tire on different terrains
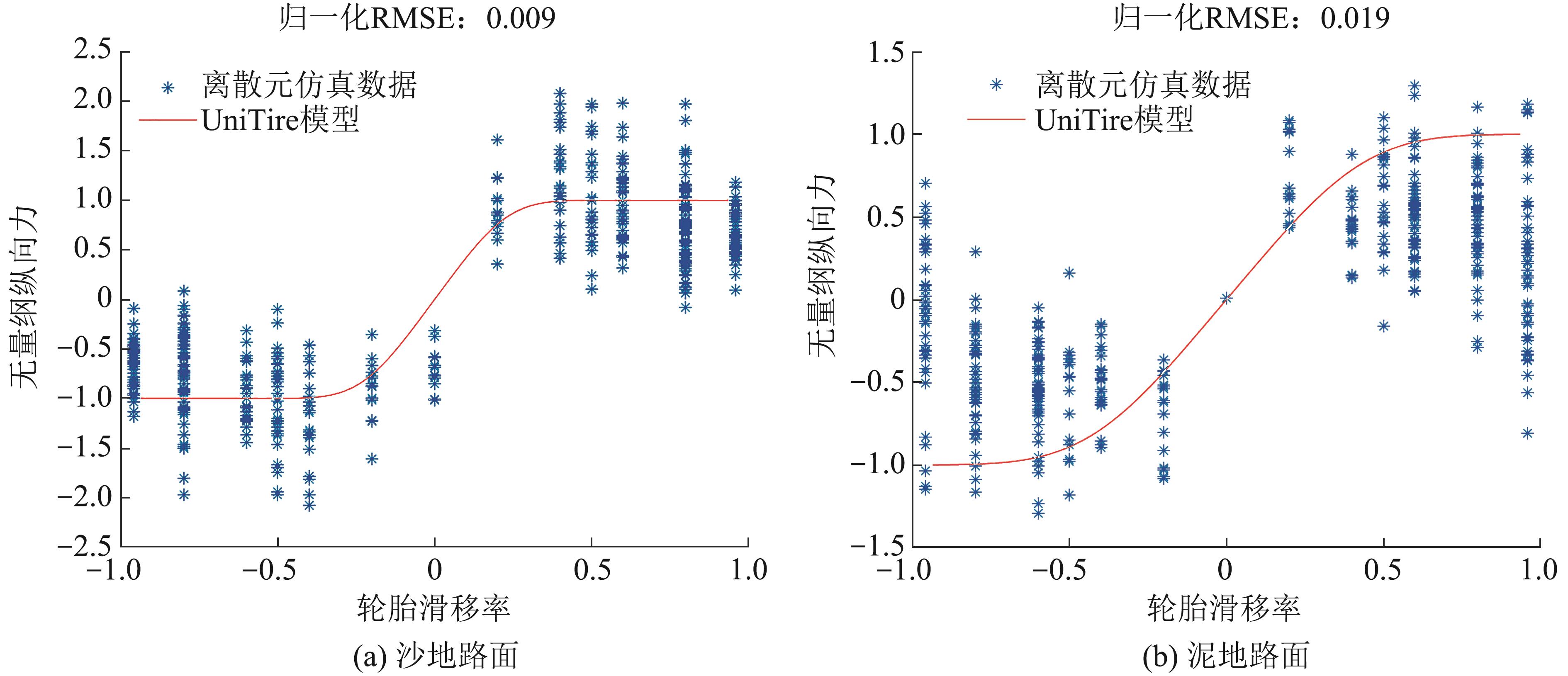

Fig. 8
Comparison of different model experiments and simulation
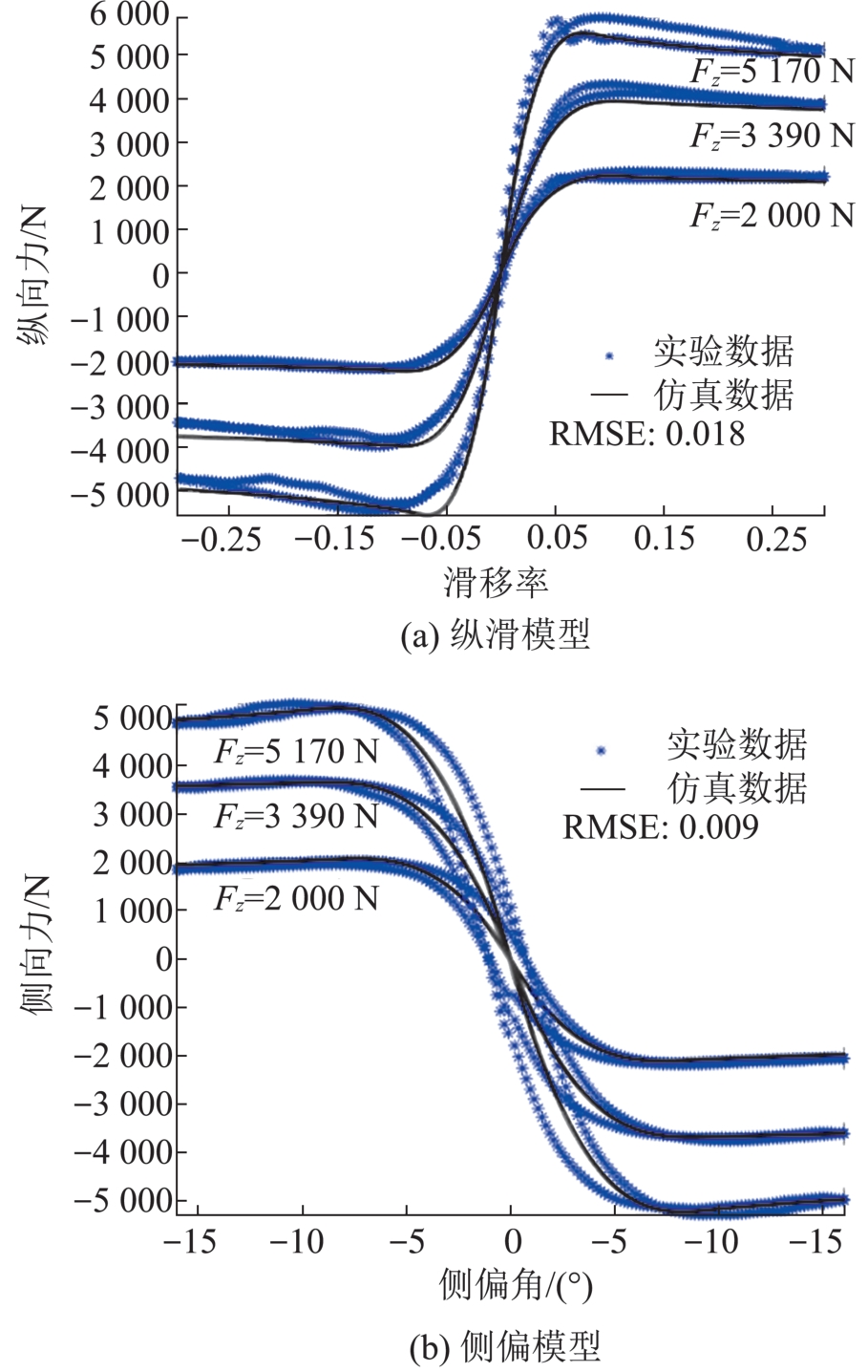
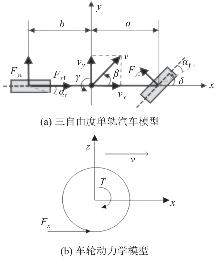
Fig. 9
Three-degree-of-freedom monorail automotive model and wheel dynamics model
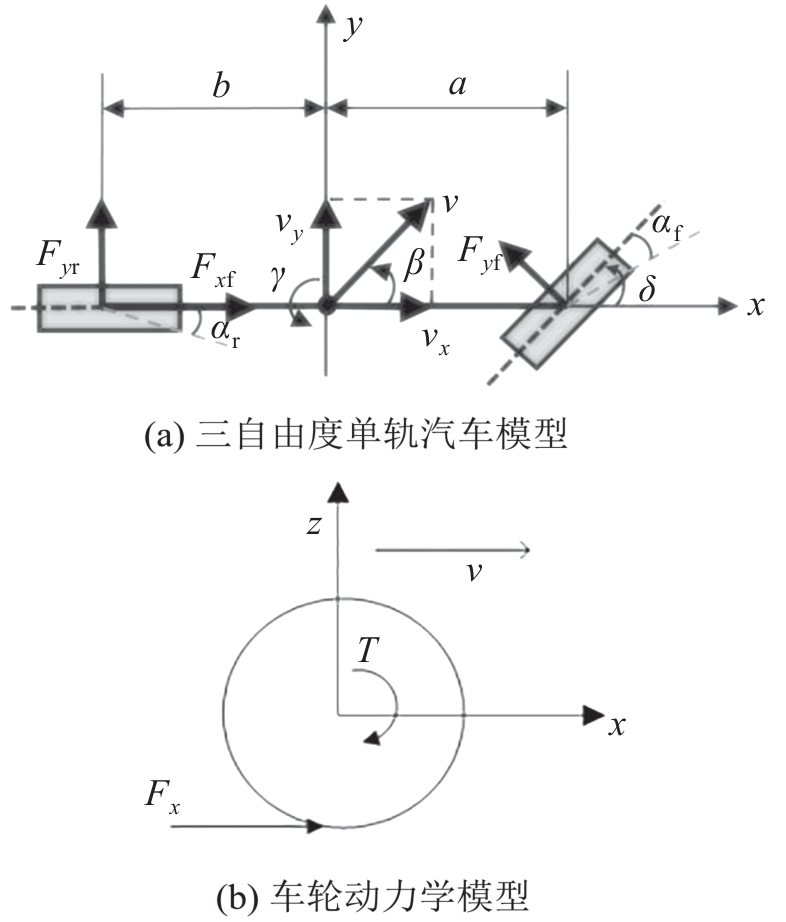

Fig. 10
Process of neural network dataset generation for real-virtual fusion data
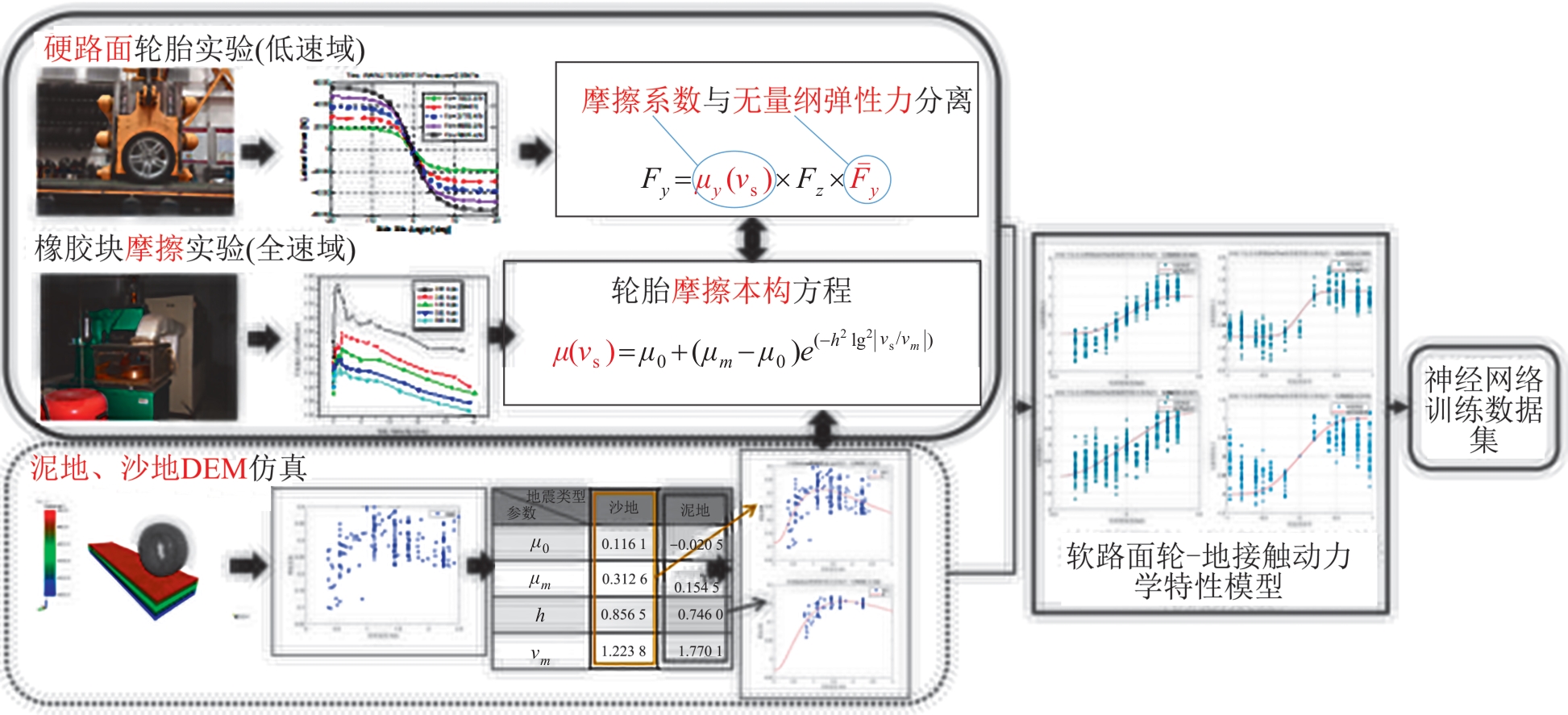

Fig. 11
Process of neural network model dataset generation
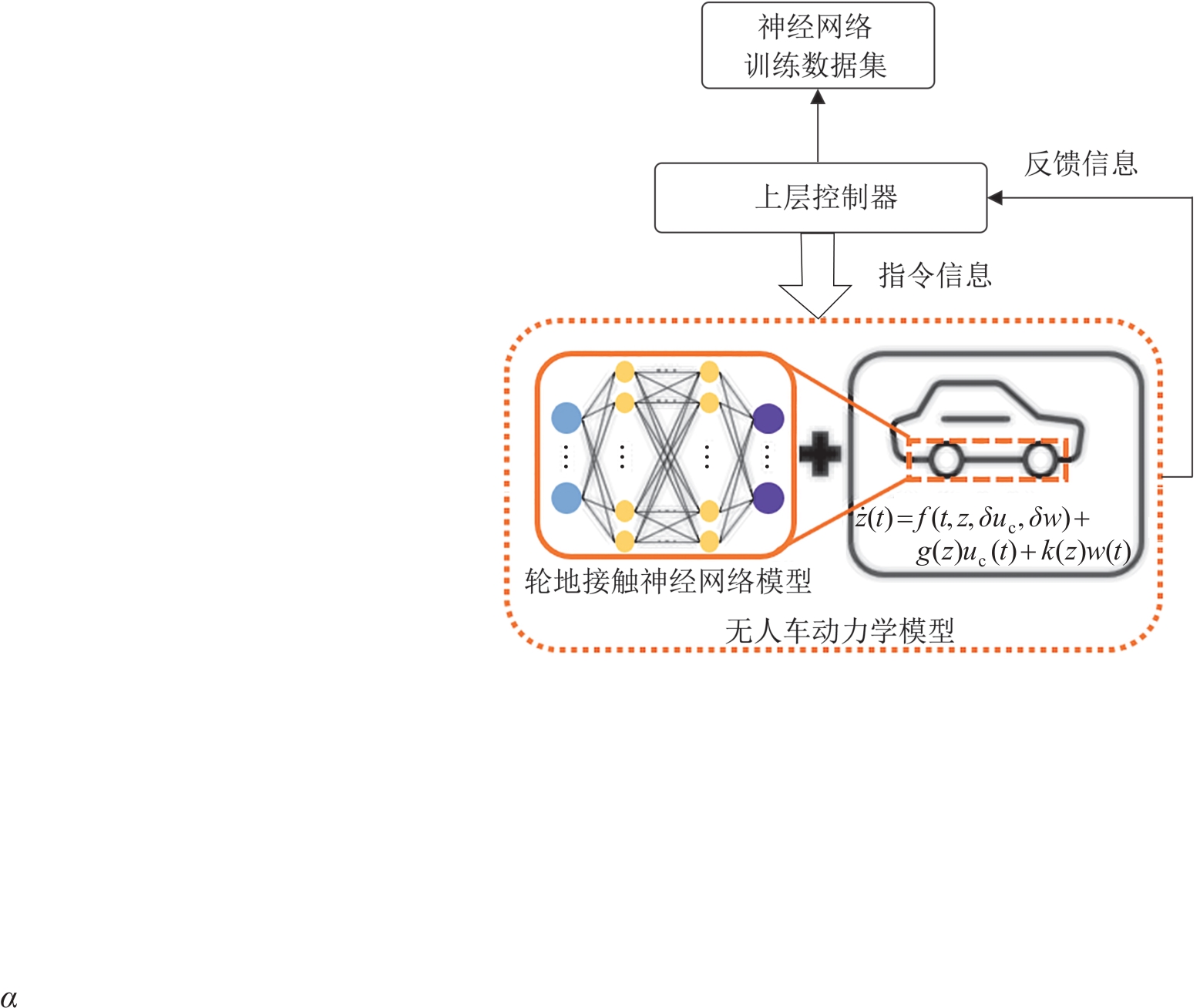
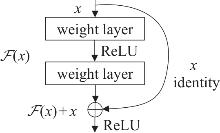
Fig. 12
Basic architecture of RNN
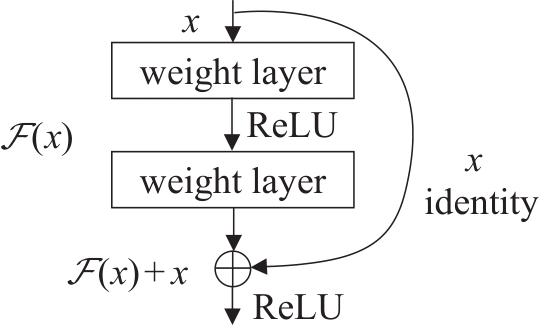

Fig. 13
Residual network model of unmanned vehicl
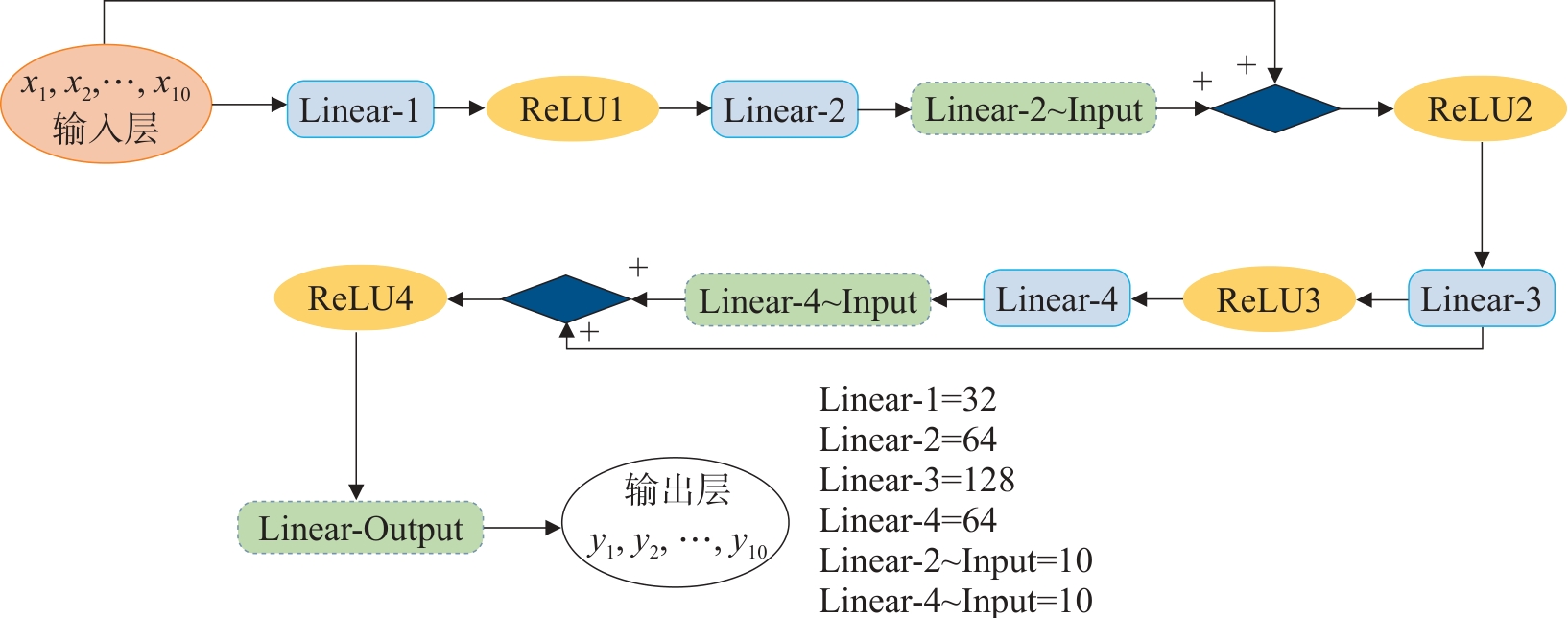
Fig. 14
Loss curve for training process of RNN model for unmanned vehicles
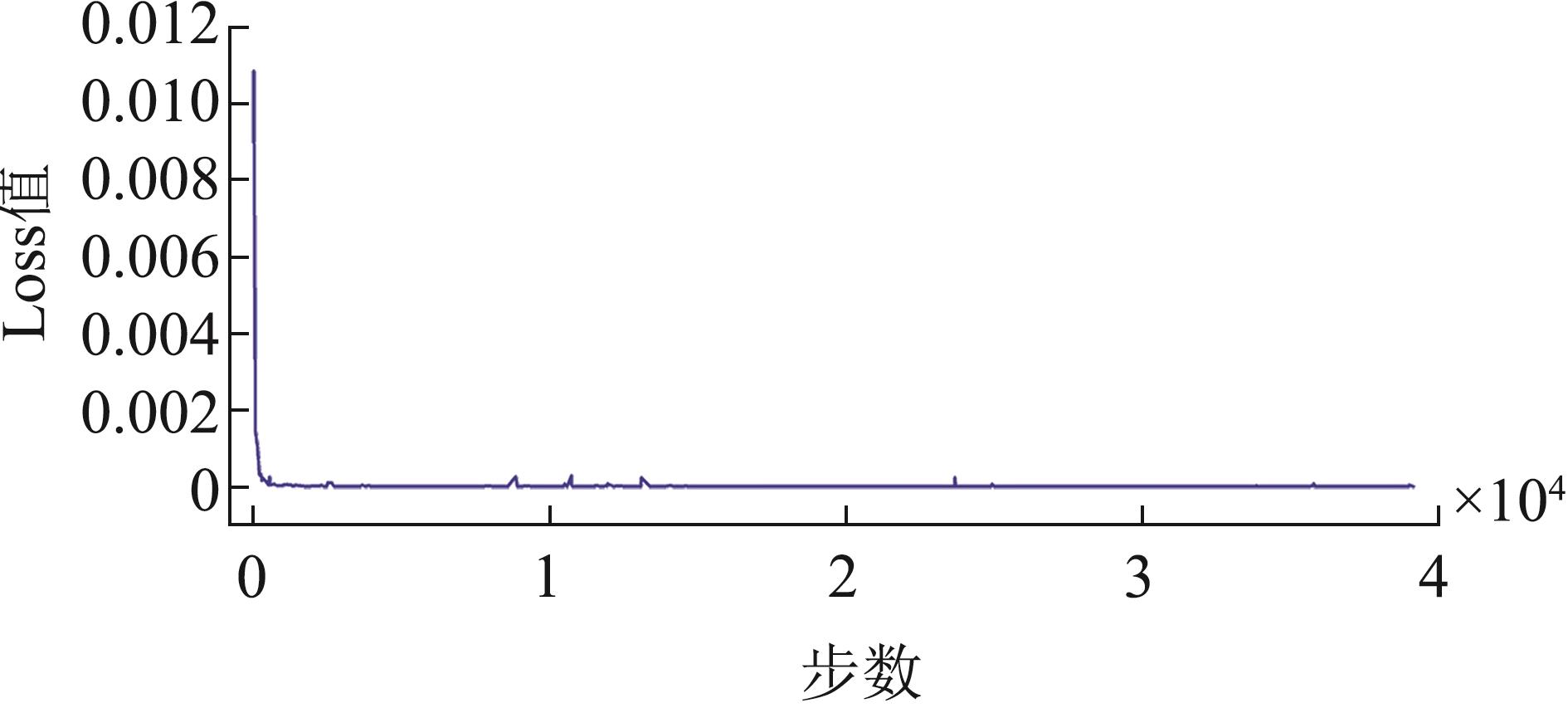
Fig. 15
Validation results of nonlinear neural network tire model training
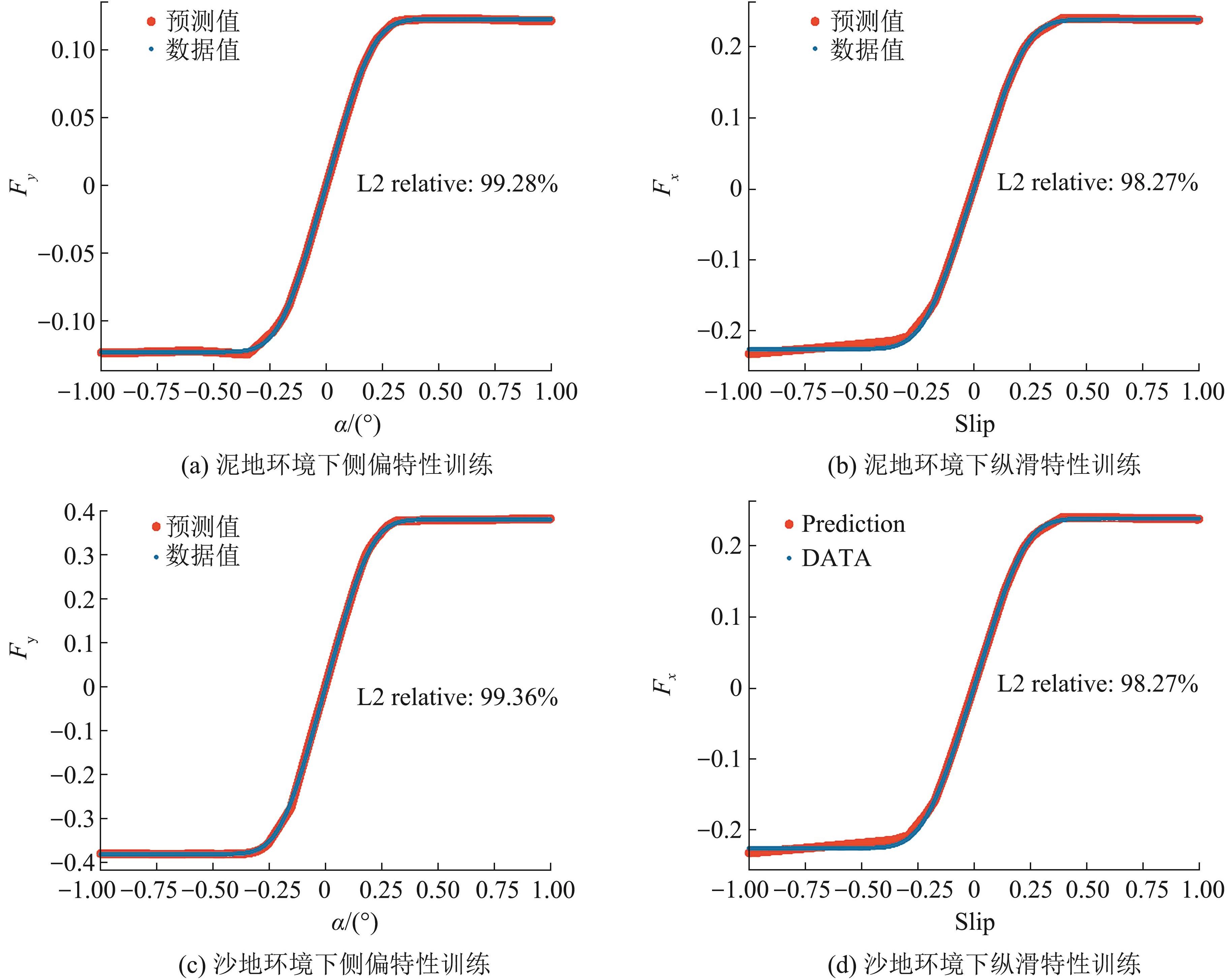

Fig. 16
Results of sample data comparison test
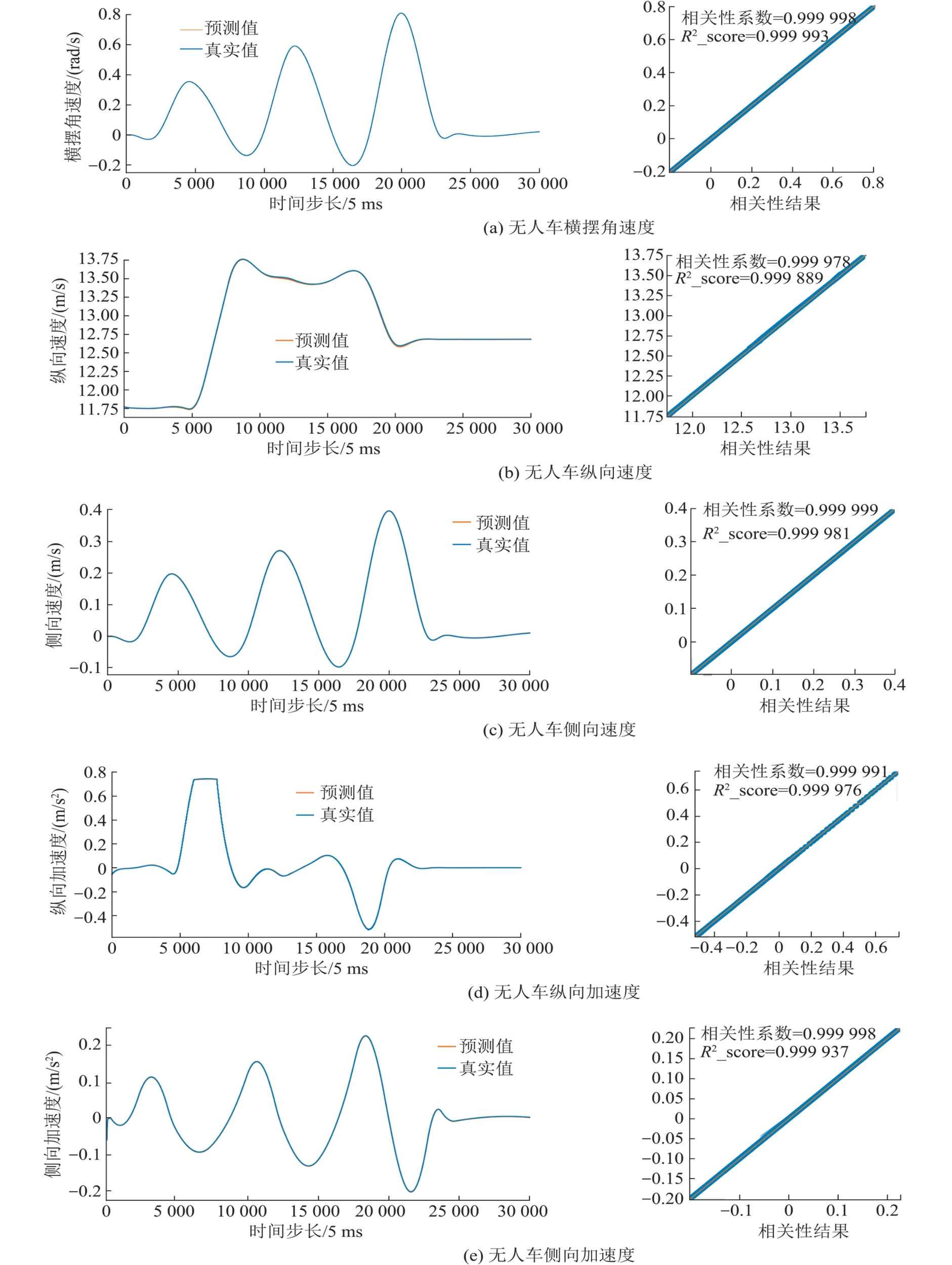
Table 2
Configuration validation results of various neural networks
| 输出状态量 | 残差神经网络 | 前馈神经网络 | 循环神经网络 |
|---|---|---|---|
| 横摆角速度 | 0.999 998 | 0.998 507 | 0.841 569 |
| 纵向速度 | 0.999 978 | 0.512 992 | 0.187 719 |
| 侧向速度 | 0.999 991 | 0.998 709 | 0.706 560 |
| 纵向加速度 | 0.999 991 | 0.996 608 | 0.177 136 |
| 侧向加速度 | 0.999 998 | 0.999 840 | 0.925 140 |
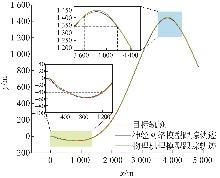
Fig. 17
Effect of trajectory tracking based on different model
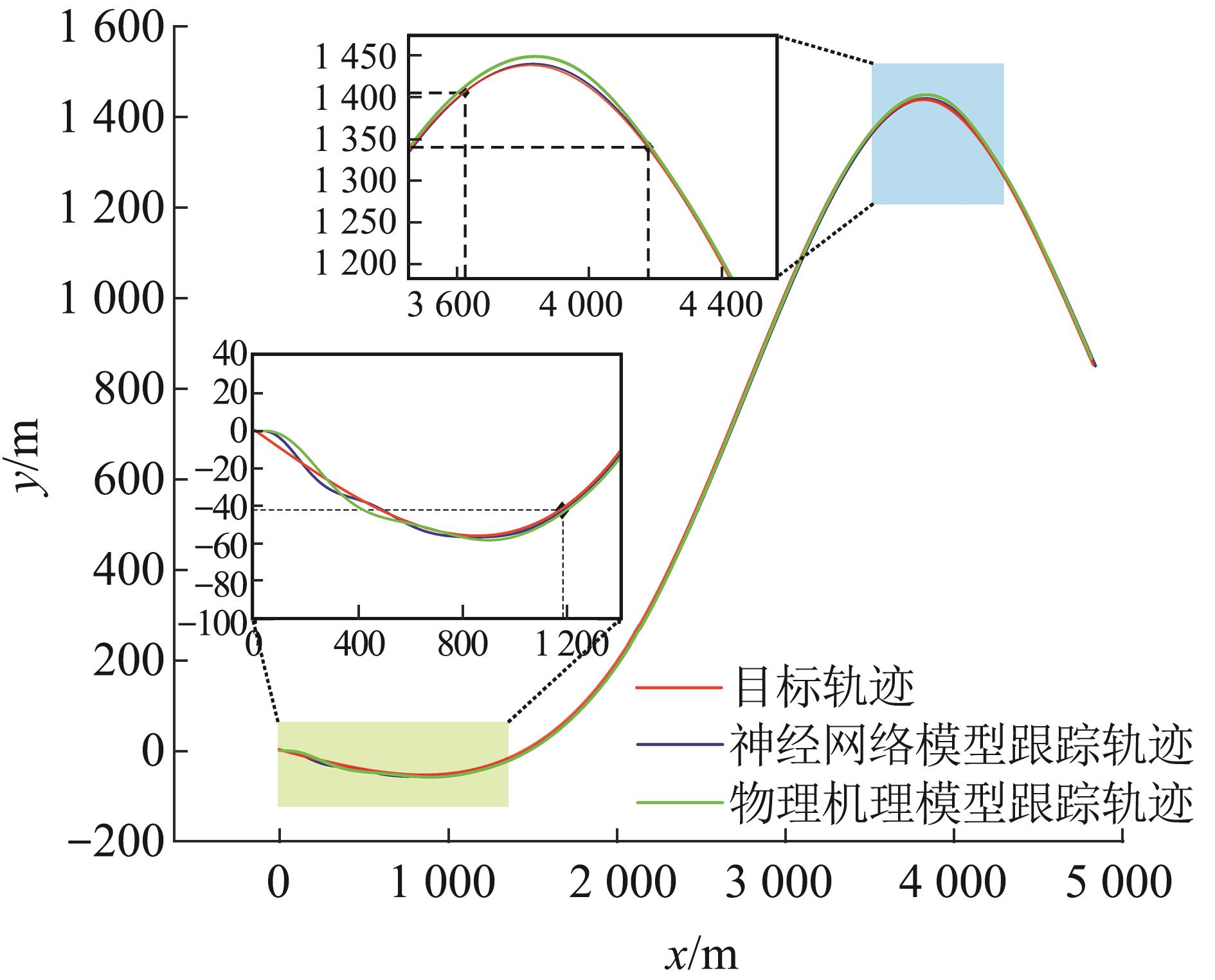
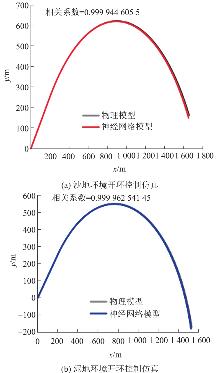
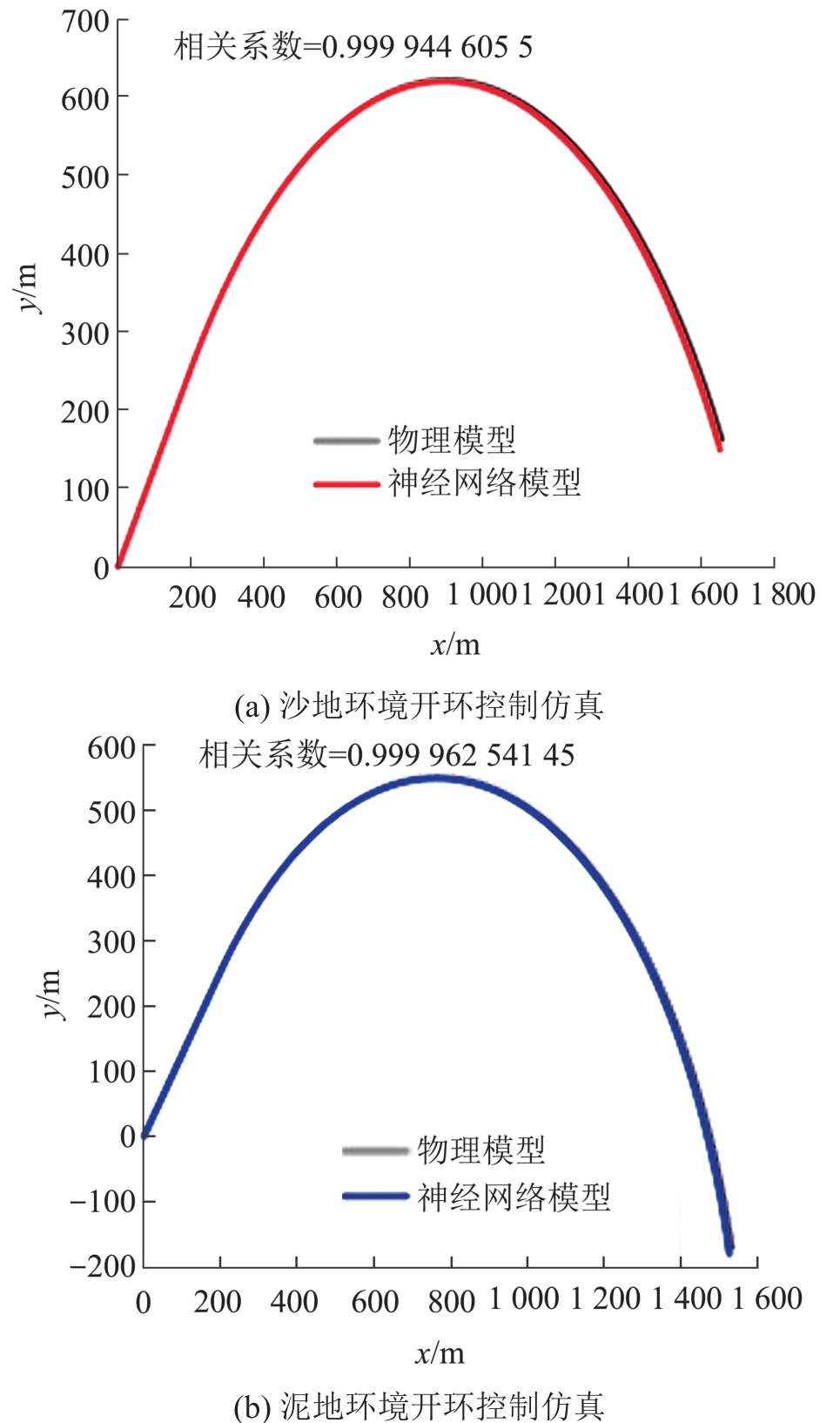
Fig. 18
Open-loop control simulation effect under extreme conditions
| [1] | Pan Yongjun, Nie Xiaobo, Li Zhixiong, et al. Data-driven Vehicle Modeling of Longitudinal Dynamics Based on a Multibody Model and Deep Neural Networks[J]. Measurement, 2021, 180: 109541. |
| [2] | Liu Siyuan, Liu Yancheng, Liang Xiaoling, et al. Uncertainty Observation-based Adaptive Succinct Fuzzy-neuro Dynamic Surface Control for Trajectory Tracking of Fully Actuated Underwater Vehicle System with Input Saturation[J]. Nonlinear Dynamics, 2019, 98(3): 1683-1699. |
| [3] | Funahashi Ken-ichi, Nakamura Yuichi. Approximation of Dynamical Systems by Continuous Time Recurrent Neural Networks[J]. Neural Networks, 1993, 6(6): 801-806. |
| [4] | Devineau Guillaume, Polack Philip, Altché Florent, et al. Coupled Longitudinal and Lateral Control of a Vehicle Using Deep Learning[C]//2018 21st International Conference on Intelligent Transportation Systems (ITSC). Piscataway: IEEE, 2018: 642-649. |
| [5] | Garimella G, Funke J, Wang Chuang, et al. Neural Network Modeling for Steering Control of an Autonomous Vehicle[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2017: 2609-2615. |
| [6] | Osman O A, Rakha H. Application of Deep Learning for Characterization of Drivers' Engagement in Secondary Tasks in In-Vehicle Systems[J]. Transportation Research Record, 2020, 2674(8): 429-440. |
| [7] | Spielberg N A, Brown M, Kapania N R, et al. Neural Network Vehicle Models for High-performance Automated Driving[J]. Science Robotics, 2019, 4(28): eaaw1975. |
| [8] | Spielberg N A, Brown M, Gerdes J C. Neural Network Model Predictive Motion Control Applied to Automated Driving with Unknown Friction[J]. IEEE Transactions on Control Systems Technology, 2022, 30(5): 1934-1945. |
| [9] | Rokonuzzaman Mohammad, Mohajer Navid, Nahavandi Saeid, et al. Model Predictive Control with Learned Vehicle Dynamics for Autonomous Vehicle Path Tracking[J]. IEEE Access, 2021, 9: 128233-128249. |
| [10] | 庄晔. 轮胎动摩擦特性研究及其对车辆操纵稳定性的影响[D]. 长春: 吉林大学, 2004. |
| Zhuang Ye. Study on Dynamic Friction Property of Tire and Its Effect on Vehicle Handling[D]. Changchun: Jilin University, 2004. | |
| [11] | 李翔宇, 么鸣涛, 李宝玉, 等. 基于MATLAB的汽车操纵稳定性仿真分析[J]. 汽车实用技术, 2023, 48(24): 95-100. |
| Li Xiangyu, Yao Mingtao, Li Baoyu, et al. Simulation Analysis of Vehicle Handling and Stability Based on MATLAB[J]. Automobile Applied Technology, 2023, 48(24): 95-100. | |
| [12] | LeCun Y, Bengio Y, Hinton G. Deep Learning[J]. Nature, 2015, 521(7553): 436-444. |
| [13] | 柴慧敏, 张勇, 李欣粤, 等. 基于深度学习的空中目标威胁评估方法[J]. 系统仿真学报, 2022, 34(7): 1459-1467. |
| Chai Huimin, Zhang Yong, Li Xinyue, et al. Aerial Target Threat Assessment Method Based on Deep Learning[J]. Journal of System Simulation, 2022, 34(7): 1459-1467. | |
| [14] | 孙辉辉, 胡春鹤, 张军国. 移动机器人运动规划中的深度强化学习方法[J]. 控制与决策, 2021, 36(6): 1281-1292. |
| Sun Huihui, Hu Chunhe, Zhang Junguo. Deep Reinforcement Learning for Motion Planning of Mobile Robots[J]. Control and Decision, 2021, 36(6): 1281-1292. | |
| [15] | 杨路辉, 刘光杰, 翟江涛, 等. 一种改进的卷积神经网络恶意域名检测算法[J]. 西安电子科技大学学报, 2020, 47(1): 37-43. |
| Yang Luhui, Liu Guangjie, Zhai Jiangtao, et al. Improved Algorithm for Detection of the Malicious Domain Name Based on the Convolutional Neural Network[J]. Journal of Xidian University, 2020, 47(1): 37-43. | |
| [16] | 胡琦瑶, 杨皓文, 王佳欣, 等. 基于弱监督深度学习的图像检索技术研究[J]. 西北大学学报(自然科学版), 2020, 50(5): 793-801. |
| Hu Qiyao, Yang Haowen, Wang Jiaxin, et al. Research on Image Retrieval Based on Weakly-supervised Deep Learning[J]. Journal of Northwest University(Natural Science Edition), 2020, 50(5): 793-801. | |
| [17] | He Kaiming, Zhang Xiangyu, Ren Shaoqing, et al. Deep Residual Learning for Image Recognition[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE. 2016: 770-778. |
| [18] | 仝卫国, 曾世超, 张立峰, 等. 基于深度残差神经网络的电阻层析成像及流型辨识方法[J]. 系统仿真学报, 2022, 34(9): 2028-2036. |
| Tong Weiguo, Zeng Shichao, Zhang Lifeng, et al. Electrical Resistance Tomography and Flow Pattern Identification Method Based on Deep Residual Neural Network[J]. Journal of System Simulation, 2022, 34(9): 2028-2036. | |
| [19] | 胥雪炎, 李补喜. 不同被解释变量选择对决定系数R2的影响研究[J]. 太原科技大学学报, 2007, 28(5): 363-365. |
| Xu Xueyan, Li Buxi. Research on the Effect of Selection of Dependent Variables on R2 Statistic[J]. Journal of Taiyuan University of Science and Technology, 2007, 28(5): 363-365. | |
| [20] | 柴同, 袁逸萍, 马军岩, 等. 基于K-CNN和N-GRU的风电机组发电机状态预测[J]. 机械强度, 2023, 45(5): 1043-1049. |
| Chai Tong, Yuan Yiping, Ma Junyan, et al. State Prediction of Wind Turbine Generator Based On K-CNN and N-GRU[J]. Journal of Mechanical Strength, 2023, 45(5): 1043-1049. | |
| [21] | Wool H E D. The Relation Between Measures of Correlation in the Universe of Sample Permutations[J]. Biometrika, 1944, 33(2): 129-135. |
| [1] | Feng Xuejian, Ding Han, Tong Yiqi, Huo Chaoying, Zhang Yanjin. Simulation and Multi-perspective Recognition Algorithm for Typical Trajectory Shapes [J]. Journal of System Simulation, 2026, 38(3): 725-735. |
| [2] | Liu Peijin, Zhang Minxin, He Lin, Sun Yige, Su Tingqi. Research on Visual Place Recognition Algorithms for Complex Urban Environments [J]. Journal of System Simulation, 2026, 38(3): 818-828. |
| [3] | Wang Jiheng, Hu Yang, Song Ziqiu, Fang Fang, Liu Jizhen. Prediction of Inflow Wind Field for Large-scale Wind Turbines Based on Multimodal Hybrid Deep Learning [J]. Journal of System Simulation, 2026, 38(2): 501-517. |
| [4] | Zou Changjun, Ge Zhiyu, Zhong Chenxi. Spatio-temporal Swin Transformer-based Flow-solid Coupling Interaction Sequence Image Prediction Network [J]. Journal of System Simulation, 2026, 38(1): 112-124. |
| [5] | Li Zhiqiang, Shen Xukun, Hu Yong, Zhou Xueyang, Chen Yifan. Material Reconstruction from Single Image Combining Neural Networks with Singular Value Decomposition [J]. Journal of System Simulation, 2026, 38(1): 189-199. |
| [6] | Wei Chengbiao, Zhao Taoyan, Cao Jiangtao, Li Ping. Design and Prediction of Deep Fuzzy Neural Network [J]. Journal of System Simulation, 2025, 37(9): 2200-2210. |
| [7] | Lü Jinhu, Jiang Hongyi, Liu Deyuan, Tan Shaolin. Modeling and Simulation of Complex Systems Based on Graph Neural Networks [J]. Journal of System Simulation, 2025, 37(7): 1624-1638. |
| [8] | Wang Bingheng, Liu Tingrui, Yang Fan, Zhang Huan, Li Wei, Ma Ping, Yang Ming. Research on Requirements and Methods for Intelligent Assessment of Simulation Credibility [J]. Journal of System Simulation, 2025, 37(7): 1710-1722. |
| [9] | Chen Kun, Chen Liang, Xie Jiming, Liu Fengbo, Chen Taixiong, Wei Lukuan. Simulation Study on Adaptive Signal Control of Deformed Intersection Based on LSTM-GNN [J]. Journal of System Simulation, 2025, 37(6): 1343-1351. |
| [10] | Wang Ziyi, Zhang Kai, Qian Dianwei, Liu Yuzhen. A DRL⁃based Approach for Distributed Equipment Nodes Selection [J]. Journal of System Simulation, 2025, 37(6): 1565-1573. |
| [11] | Jiang Dawei, Dong Yangyang, Zhang Lidong, Lu Xiao, Dong Chunxi. Research on Air Target Threat Assessment Technology Based on Deep Learning [J]. Journal of System Simulation, 2025, 37(3): 791-802. |
| [12] | Zhang Peng, Feng Ke, Gong Jiancheng, Yang Xiaoqiang, Shen Jinxing. Combat Effectiveness Evaluation of Air Defense Missile Weapon System Based on RBF Neural Network [J]. Journal of System Simulation, 2025, 37(2): 529-540. |
| [13] | Shen Jiawei, Cai Daye, Yang Guoqing, Lü Pan, Li Hong. Dynamic Loading Simulation Method for Large-scale Spiking Neural Network [J]. Journal of System Simulation, 2025, 37(2): 541-550. |
| [14] | Li Xiaobin, Hu Bing, Yin Chao, Li Bo, Ma Jun. Spatiotemporal Graph Convolution-based Demand Forecasting and Simulation Analysis for Automotive Parts Supply Chain [J]. Journal of System Simulation, 2025, 37(12): 3060-3074. |
| [15] | Zhang Wenkang, Sun Xiaofeng, Zhong Yiping, Yin Yong. Numerical Simulations of Ship Liquid Tank Sloshing Based on Graph Neural Networks [J]. Journal of System Simulation, 2025, 37(12): 3087-3099. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
