

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (2): 325-334.doi: 10.16182/j.issn1004731x.joss.23-1185
• Papers • Previous Articles Next Articles
Fang Guoqiang, Chang Haitao, Liu Xing, Liu Zhengxiong, Huang Panfeng
Received:2023-09-25
Revised:2023-10-31
Online:2025-02-14
Published:2025-02-10
Contact:
Liu Zhengxiong
CLC Number:
Fang Guoqiang, Chang Haitao, Liu Xing, Liu Zhengxiong, Huang Panfeng. Research on Task Planning Methods for Space Robot Assisted Operation[J]. Journal of System Simulation, 2025, 37(2): 325-334.
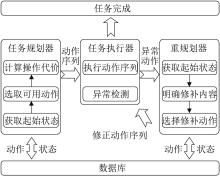
Fig. 1
Task planning method for space robot assisted operation
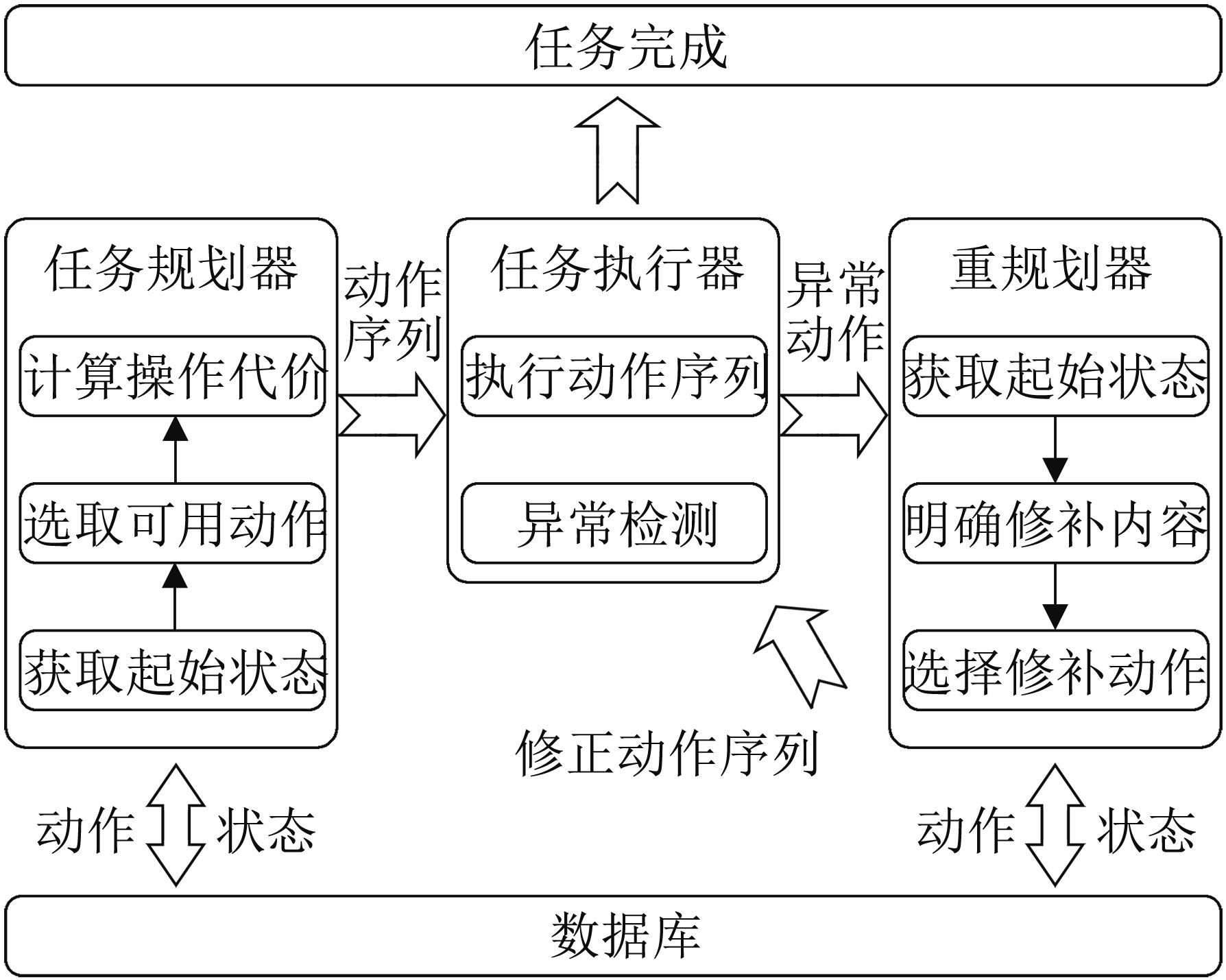
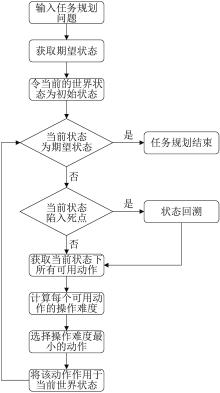
Fig. 2
Fast forward search algorithm based on operation cost
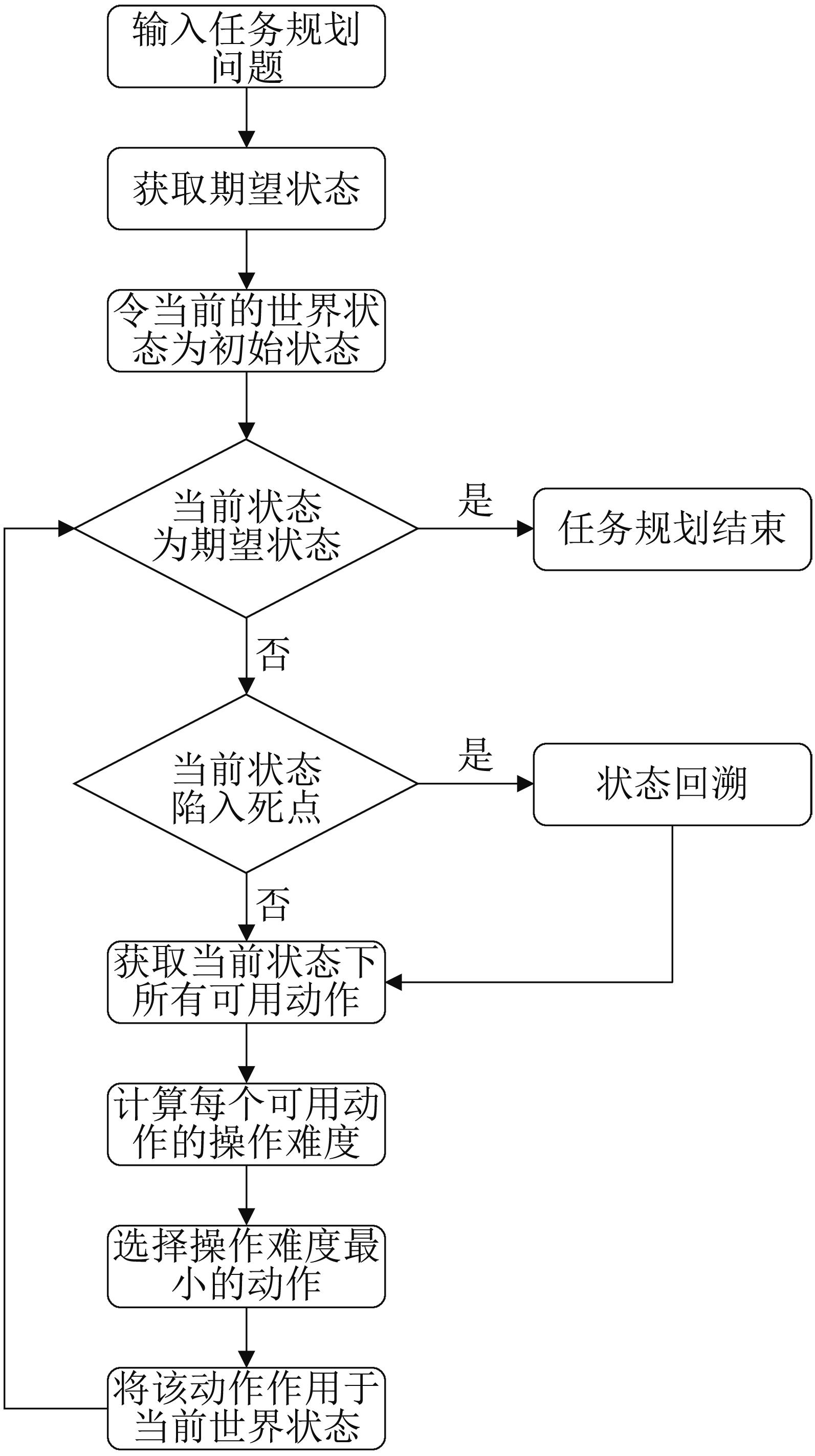
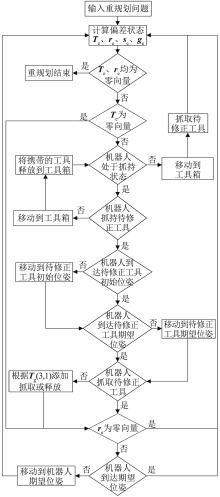
Fig. 3
Task adaptive replanning algorithm based on hierarchical network
Table 1
Position and orientation of task waypoint
| 名称 | 位置/m | 姿态/(°) |
|---|---|---|
| 工具箱 | ||
| 起始位置 | ||
| 开盖位置 | ||
| 旋拧位置1 | ||
| 旋拧位置2 | ||
| 插入位置 | ||
| 加注位置 |
Table 2
Characteristics and actions required for replenishment
| 动作编号 | 任务 | 动作 | 工具 | 表示方法 |
|---|---|---|---|---|
| 任务1 | 移动空间机器人 | 移动 | 无 |  |
| 任务2 | 抓取物体 | 抓取 | 无 |  |
| 任务3 | 释放物体 | 释放 | 无 |  |
| 任务4 | 旋拧螺栓 | 旋拧 | 旋拧工具 |  |
| 任务5 | 打开盖子 | 开盖 | 开盖工具 |  |
| 任务6 | 插入输油孔 | 插入 | 插入工具 |  |
| 任务7 | 燃料加注补充 | 加注 | 加注工具 |  |

Fig. 4
Connectivity of task waypoint
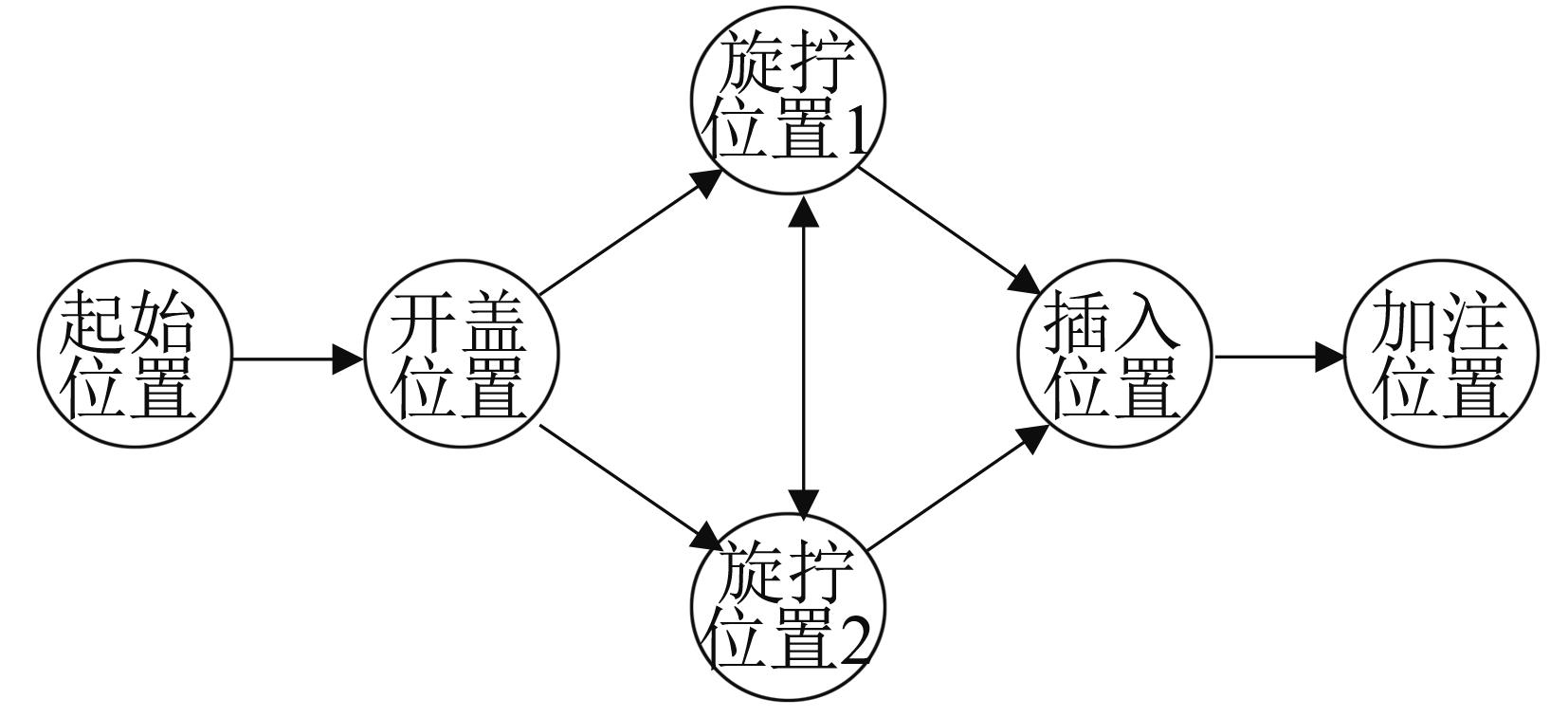

Fig. 5
Action sequence of space robot assisted refueling task
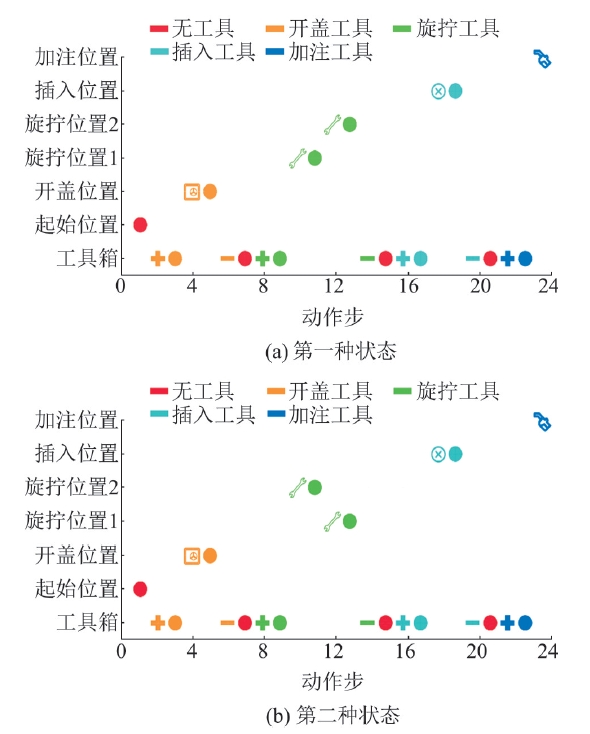

Fig. 6
Fast forward search planning method based on operational cost evaluation(no operation rule)
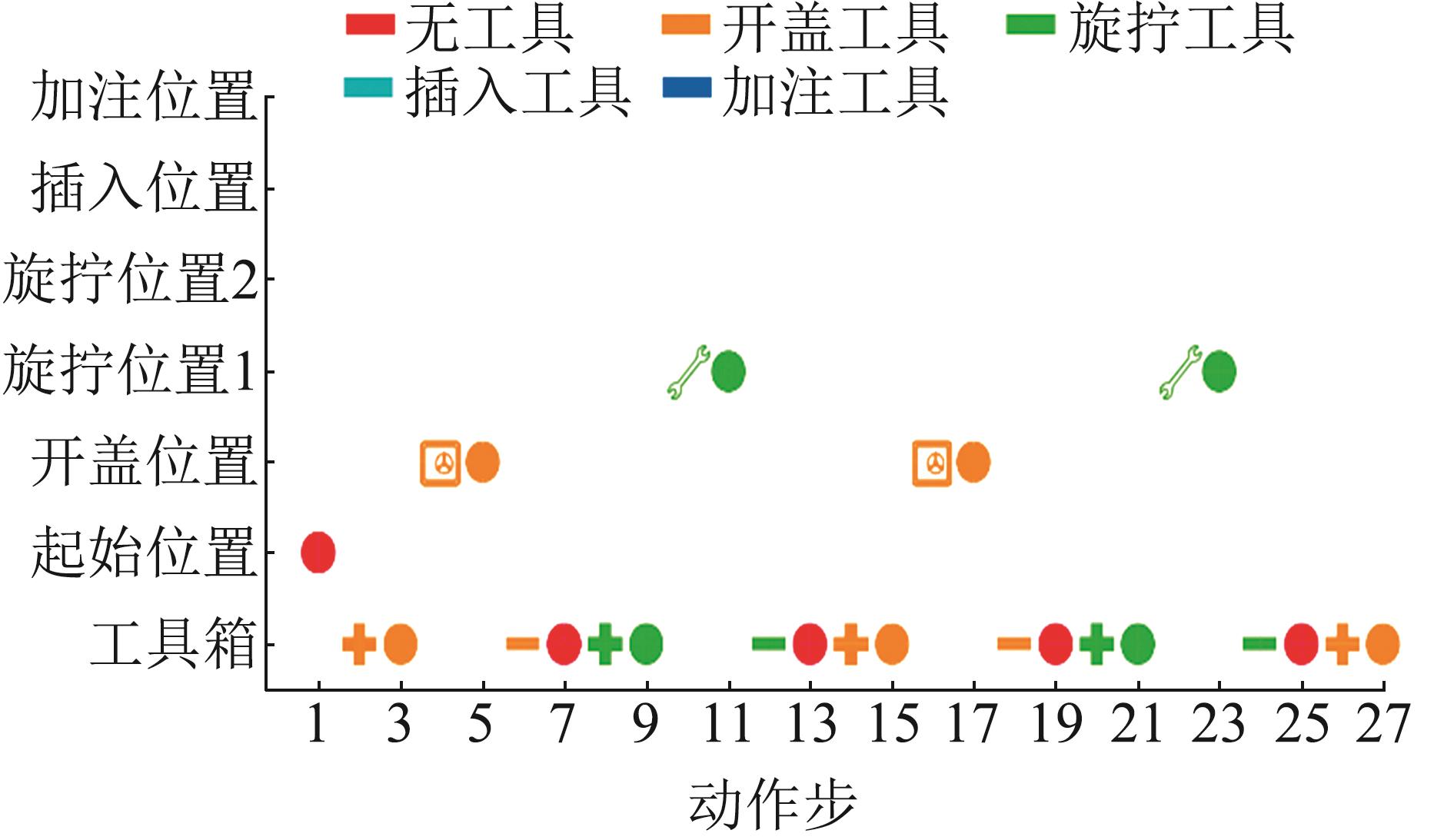

Fig. 7
Fast forward search planning method based on operational cost evaluation(operation rule)
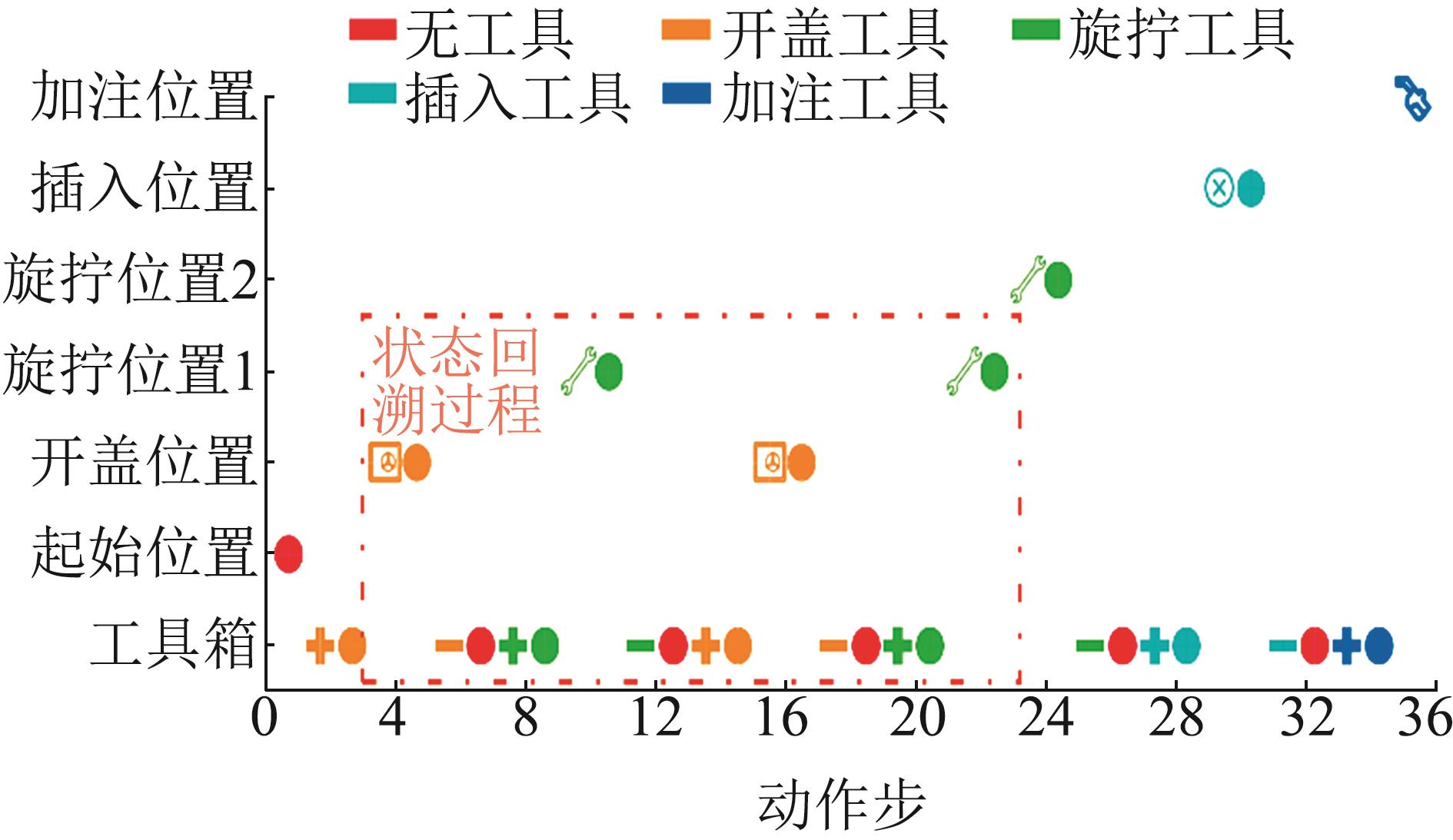
Table 3
Simulation results of algorithm
| 算法 | 时间/min |
|---|---|
| 图规划算法 | 16.068 |
| 快速前向搜索算法 | 4.051 |
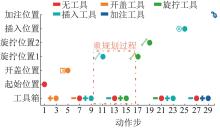
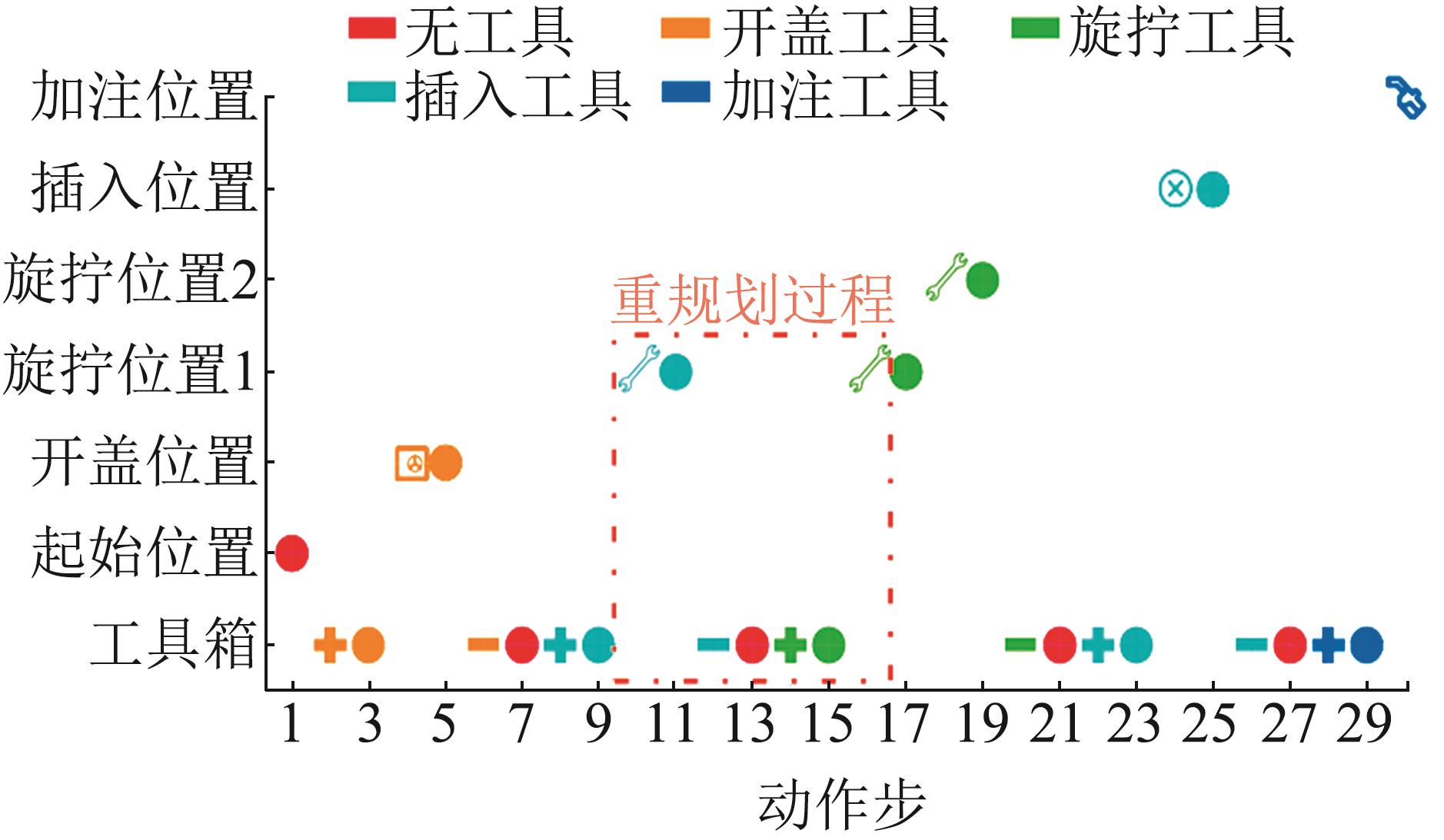
Fig. 8
Task adaptive replanning algorithm based on hierarchical network
| 1 | 高振良, 孙小凡, 刘育强, 等. 航天器在轨延寿服务发展现状与展望[J]. 航天器工程, 2022, 31(4): 98-107. |
| Gao Zhenliang, Sun Xiaofan, Liu Yuqiang, et al. Development and Prospect of Spacecraft On-orbit Life Extension Servicing[J]. Spacecraft Engineering, 2022, 31(4): 98-107. | |
| 2 | 陈钢, 高贤渊, 赵治恺, 等. 空间机械臂智能规划与控制技术[J]. 南京航空航天大学学报, 2022, 54(1): 1-16. |
| Chen Gang, Gao Xianyuan, Zhao Zhikai, et al. Review on Intelligent Planning and Control Technology of Space Manipulator[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2022, 54(1): 1-16. | |
| 3 | Fikes R E, Nilsson N J. Strips: A New Approach to the Application of Theorem Proving to Problem Solving[J]. Artificial Intelligence, 1971, 2(3/4): 189-208. |
| 4 | Helmert Malte. Concise Finite-domain Representations for PDDL Planning Tasks[J]. Artificial Intelligence, 2009, 173(5/6): 503-535. |
| 5 | Blum A L, Furst M L. Fast Planning Through Planning Graph Analysis[J]. Artificial Intelligence, 1997, 90(1/2): 281-300. |
| 6 | 贾庆轩, 黄旭东, 陈钢, 等. 基于改进图规划的机械臂任务规划方法[J]. 北京邮电大学学报, 2018, 41(3): 27-31. |
| Jia Qingxuan, Huang Xudong, Chen Gang, et al. Manipulator Task Planning Method Based on Improved Graph Planning[J]. Journal of Beijing University of Posts and Telecommunications, 2018, 41(3): 27-31. | |
| 7 | Hoffmann Jörg, Nebel Bernhard. The FF Planning System: Fast Plan Generation Through Heuristic Search[J]. Journal of Artificial Intelligence Research, 2001, 14(1): 253-302. |
| 8 | 梁瑞仕, 姜云飞, 杨会志. 基于有序爬山法的前向启发式搜索规划[J]. 电子科技大学学报, 2013, 42(3): 464-468. |
| Liang Ruishi, Jiang Yunfei, Yang Huizhi. Forward Heuristic Search Planning Based on Ordered Hill Climbing Algorithm[J]. Journal of University of Electronic Science and Technology of China, 2013, 42(3): 464-468. | |
| 9 | Erol K, Hendler J, Nau D S. HTN Planning: Complexity and Expressivity[C]// Proceedings of the Twelfth AAAI National Conference on Artificial Intelligence. Palo Alto: AAAI Press, 1994: 1123-1128. |
| 10 | Erol K, Hendler J, Nau D S. Semantics for Hierarchical Task-network Planning[J].University of Maryland at College Park, 1994. |
| 11 | Erol K, Hendler J, Nau D S. UMCP: A Sound and Complete Procedure for Hierarchical Task-network Planning[C]//Proceedings of the Second International Conference on Artificial Intelligence Planning Systems. Palo Alto: AAAI Press, 1994: 249-254. |
| 12 | Stock Sebastian, Mansouri Masoumeh, Pecora Federico, et al. Hierarchical Hybrid Planning in a Mobile Service Robot[C]//KI 2015: Advances in Artificial Intelligence. Cham: Springer International Publishing, 2015: 309-315. |
| 13 | Lozano-Pérez Tomás, Kaelbling L P. A Constraint-based Method for Solving Sequential Manipulation Planning Problems[C]//Proceedings of 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2014: 3684-3691. |
| 14 | 路飞, 田国会, 李擎. 智能空间环境下基于本体的机器人服务自主认知及规划[J]. 机器人, 2017, 39(4): 423-430. |
| Lu Fei, Tian Guohui, Li Qing. Autonomous Cognition and Planning of Robot Service Based on Ontology in Intelligent Space Environment[J]. Robot, 2017, 39(4): 423-430. | |
| 15 | 张汝波, 童海波, 史长亭, 等. 不确定海洋环境下AUV分层任务规划与重规划研究[J]. 南京大学学报(自然科学), 2015, 51(1): 148-156. |
| Zhang Rubo, Tong Haibo, Shi Changting, et al. Research on Autonomous Underwater Vehicle Hierarchical Mission Planning and Re-planning in Uncertain Environment[J]. Journal of Nanjing University(Natural Science), 2015, 51(1): 148-156. | |
| 16 | 宋沐民, 路飞, 陆娜, 等. 智能空间下基于分层任务网络的服务机器人任务规划[J]. 控制理论与应用, 2014, 31(7): 901-907. |
| Song Mumin, Lu Fei, Lu Na, et al. Task Planning for Service Robot with Hierarchical Task Network in Intelligent Space[J]. Control Theory & Applications, 2014, 31(7): 901-907. | |
| 17 | 阎慧, 吴止锾, 高永明, 等. 面向空间机器人在轨操控的任务规划模型研究[J]. 现代电子技术, 2017, 40(4): 4-8. |
| Yan Hui, Wu Zhihuan, Gao Yongming, et al. Research on Mission Planning Model for on-orbit Control of Space Robot[J]. Modern Electronics Technique, 2017, 40(4): 4-8. | |
| 18 | Wang Yifan, Sun Hanxu, Chen Gang, et al. Hierarchical Task Planning for Multiarm Robot with Multiconstraint[J]. Mathematical Problems in Engineering, 2016, 2016(1): 2508304. |
| 19 | 刘茜, 高宇辉, 刘传凯, 等. 月面采样机械臂动态任务规划方法研究[J]. 中国科学(技术科学), 2021, 51(12): 1492-1506. |
| Liu Qian, Gao Yuhui, Liu Chuankai, et al. Dynamic Mission Planning Method for the Lunar Sampling Robotic Arm[J]. Scientia Sinica(Technologica), 2021, 51(12): 1492-1506. | |
| 20 | 黄旭东. 多约束条件下空间机械臂多目标任务规划方法研究[D]. 北京: 北京邮电大学, 2018. |
| Huang Xudong. Study of Multi-objective Task Planning of Space Manipulator Under Multi-constraint[D]. Beijing: Beijing University of Posts and Telecommunications, 2018. |
| [1] | Liu Yingang, Ma Ming, Zhang Ronghua. Dynamic Task Planning for Wargaming Based on Large Language Models [J]. Journal of System Simulation, 2026, 38(5): 1187-1204. |
| [2] | Fang Haojie, Zhen Ziyang, Gong Huajun, Xie Xu, Luo Wei. Task Planning Method for Cross-domain Cooperative Combat Operations of Unmanned Systems Under Complex Constraints [J]. Journal of System Simulation, 2026, 38(3): 785-799. |
| [3] | Yue Ma, Lin Wu, Shengming Guo. Research on Modeling and Solution Method of Operational Tasks Assignment [J]. Journal of System Simulation, 2023, 35(4): 887-898. |
| [4] | Yue Ma, Lin Wu, Yun Liu, Guangzhao Ding. Research on Modeling and Solution Method of Operational Tasks Optimization [J]. Journal of System Simulation, 2023, 35(3): 470-483. |
| [5] | Mao Liheng, Deng Qing, Liu Rouni, Kong Xianglong. CPM-GA for Multi-satellite and Multi-task Simulation Scheduling [J]. Journal of System Simulation, 2021, 33(1): 205-214. |
| [6] | Huang Xiaoqin, Chen Li. Anti-dead-zone Control for Two Flexible Links Space Robot with Integration of Motion and Vibration [J]. Journal of System Simulation, 2020, 32(3): 430-437. |
| [7] | Huang Xiaoqin, Chen Li. Recurrent CMACNN Control for Space Robot with Fully Flexible Arms and Elastic Base [J]. Journal of System Simulation, 2019, 31(9): 1899-1906. |
| [8] | Cai Rui, Wang Wei, Qu Jue, Hu Bo. Multi-seats Collaborative Task Planning Based on Improved Particle Swarm Optimization [J]. Journal of System Simulation, 2019, 31(5): 1019-1025. |
| [9] | Cheng Jing, Chen Li. Auxiliary Docking Maneuver Control Simulation of Dual-arm Space Manipulator After Capturing Operation [J]. Journal of System Simulation, 2018, 30(9): 3429-3436. |
| [10] | ZhangLijiao, Chen Li. L2-gain Robust Control for Flexible Joints and Flexible Link Space Robot [J]. Journal of System Simulation, 2018, 30(4): 1448-1455. |
| [11] | Wu Wenfeng, Zhang Yu, Rong Ming. Intelligent Technology of Command and Control System in the RTS Perspective [J]. Journal of System Simulation, 2018, 30(11): 4158-4171. |
| [12] | Zhang Lijiao, Chen Li. Adaptive Fuzzy Robust H∞ Control of Flexible-joint Space Robot [J]. Journal of System Simulation, 2017, 29(6): 1223-1228. |
| [13] | Dong Qiuhuang, Chen Li, Li Haiyun, Chen Zhiyong. Force/Position Control for Dual-arm Space Robot Capturing Object [J]. Journal of System Simulation, 2017, 29(2): 424-429. |
| [14] | Cheng Jing, Chen Li. Two Power Sliding Mode Neural Network Compensation Control for Space Robot after Target Capturing [J]. Journal of System Simulation, 2017, 29(10): 2475-2482. |
| [15] | Yu Xiaoyan, Chen Li. Robust Coordinated Motion Control of Free-floating Space Robot with Flexible-link and Flexible-joints [J]. Journal of System Simulation, 2015, 27(12): 3025-3031. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
