

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (3): 818-828.doi: 10.16182/j.issn1004731x.joss.25-0031
• Papers • Previous Articles
Liu Peijin1, Zhang Minxin1, He Lin2, Sun Yige1, Su Tingqi1
Received:2025-01-08
Revised:2025-04-08
Online:2026-03-18
Published:2026-03-27
Contact:
He Lin
CLC Number:
Liu Peijin, Zhang Minxin, He Lin, Sun Yige, Su Tingqi. Research on Visual Place Recognition Algorithms for Complex Urban Environments[J]. Journal of System Simulation, 2026, 38(3): 818-828.
Fig. 1
Algorithmic framework for visual place recognition incorporating semantic guidance
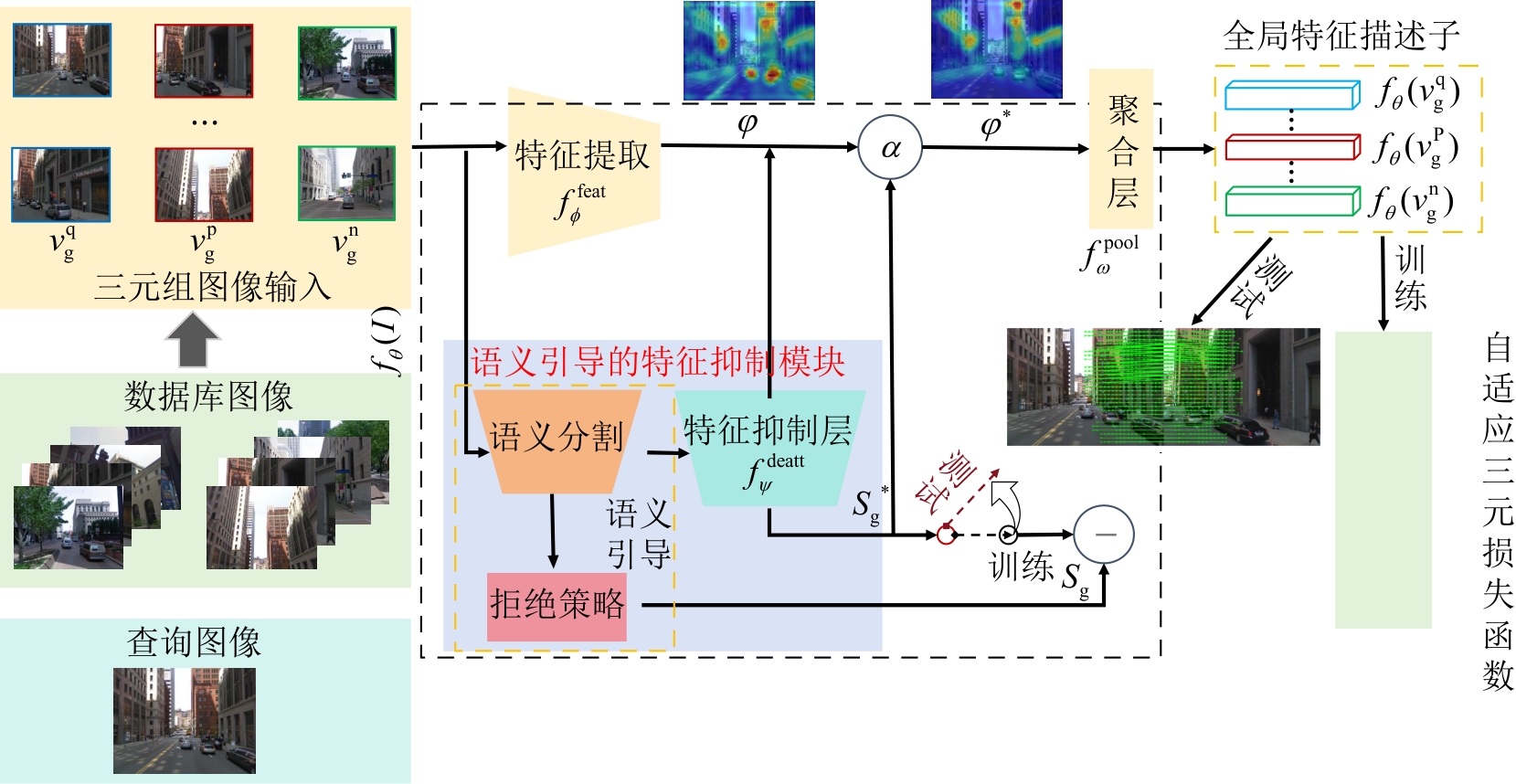

Fig. 2
Semantic-guided feature suppression module training process
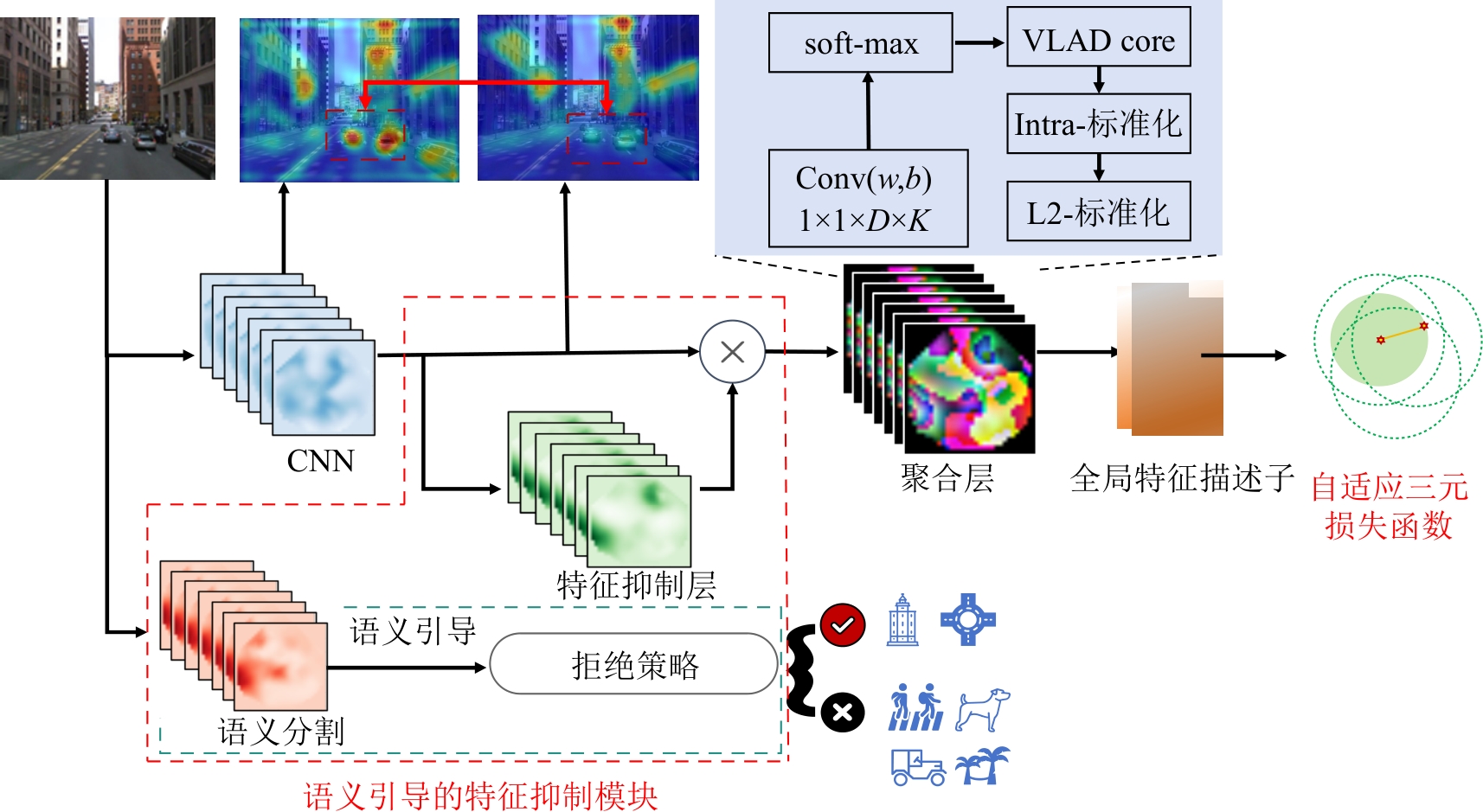
Table 1
Object category query and denial policy
| 对象 | 对象类别 | 特征 | 拒绝策略 |
|---|---|---|---|
道路、人行道等 建筑、墙等 行人等 汽车、公交车、卡车、摩托车等 树、绿化带 天空 桥梁、隧道、电线杆、交通标志等 | 道路 建筑 人 车辆 植被 天空 其他 | 静态 静态 时变 时变 季变 时变 静态 | 1 1 0 0 0 0 1 |
Fig. 3
Feature suppression layer
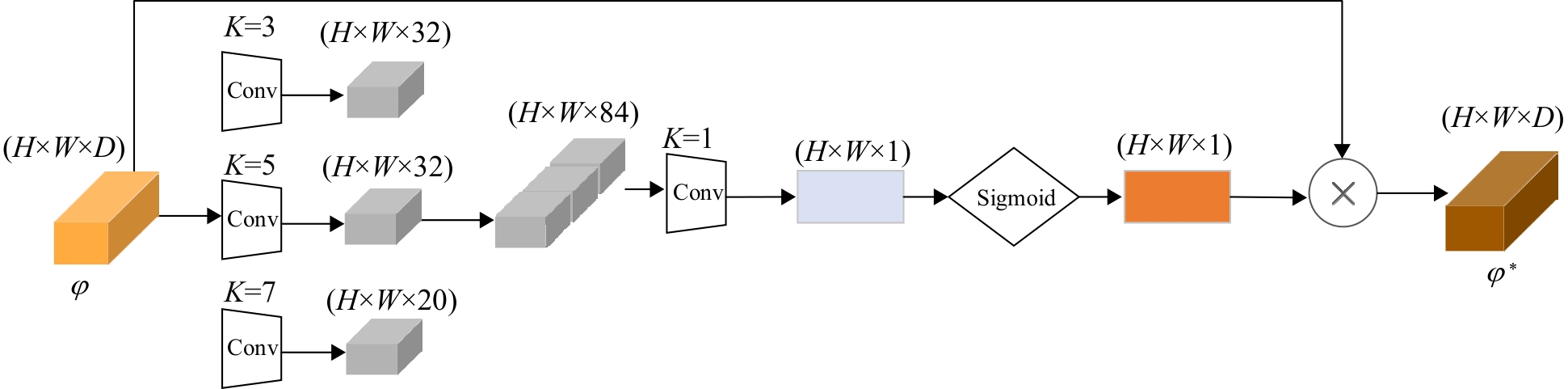

Fig. 4
Visualization results of a feature suppression model incorporating semantic guidance
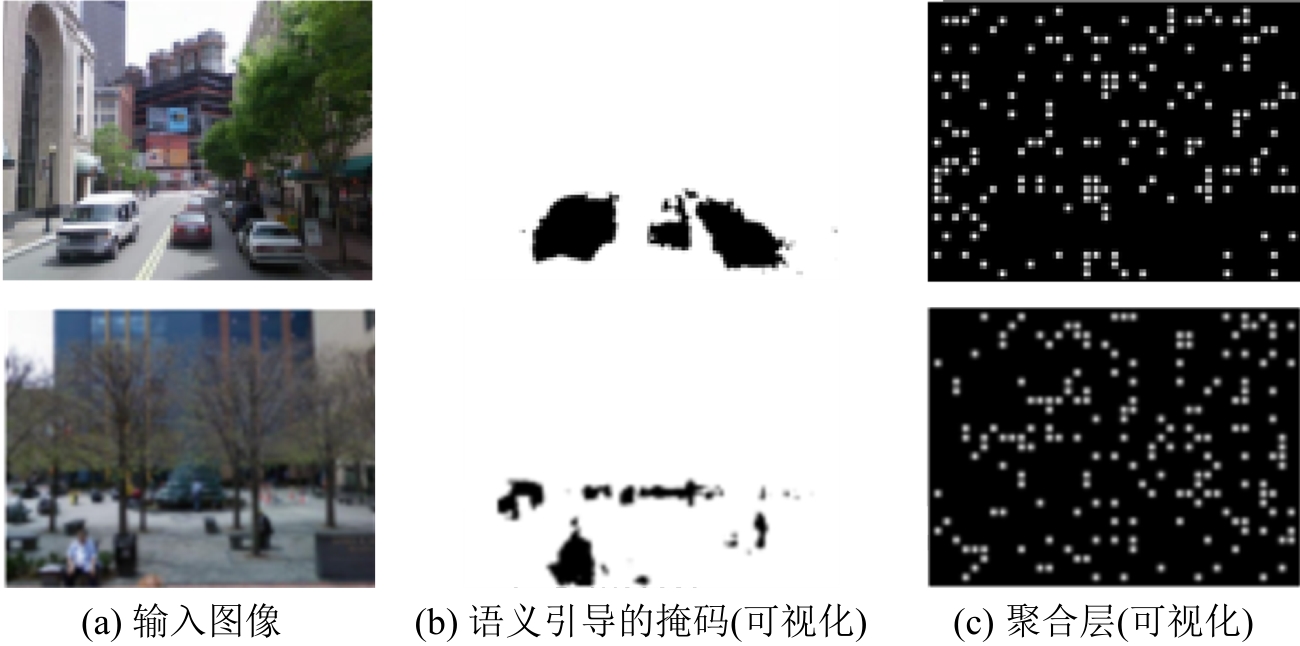
Table 2
Performance of different algorithms on two datasets
| 算法 | Pittsburgh250K(test) | Tokyo 24/7 | ||||
|---|---|---|---|---|---|---|
| R@1 | R@5 | R@10 | R@1 | R@5 | R@10 | |
| NetVLAD | 86.2 | 93.2 | 95.1 | 67.9 | 77.3 | 80.5 |
| CRN | 85.6 | 93.6 | 95.5 | 75.2 | 83.8 | 87.7 |
| APPSVR | 88.8 | 95.6 | 96.3 | 77.1 | 85.7 | 89.5 |
| Patch-NetVLAD | 88.4 | 95.7 | 96.4 | 77.1 | 84.4 | 87.0 |
| SG-VPR | 90.7 | 96.3 | 96.1 | 79.2 | 85.7 | 89.4 |
Table 3
Model size and run-time tested for Tokyo24/7test data
| 模型 | 参数量×106 | R@1/% | 时间/s |
|---|---|---|---|
| 基线 | 14.7 | 57.1 | 0.04 |
| SG-VPR | 16.2 | 65.4 | 0.06 |
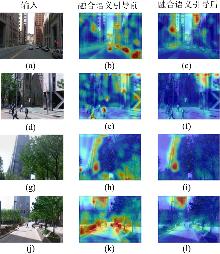
Fig. 5
Comparison of heat maps before and after fused semantic guidance under different scenario variations
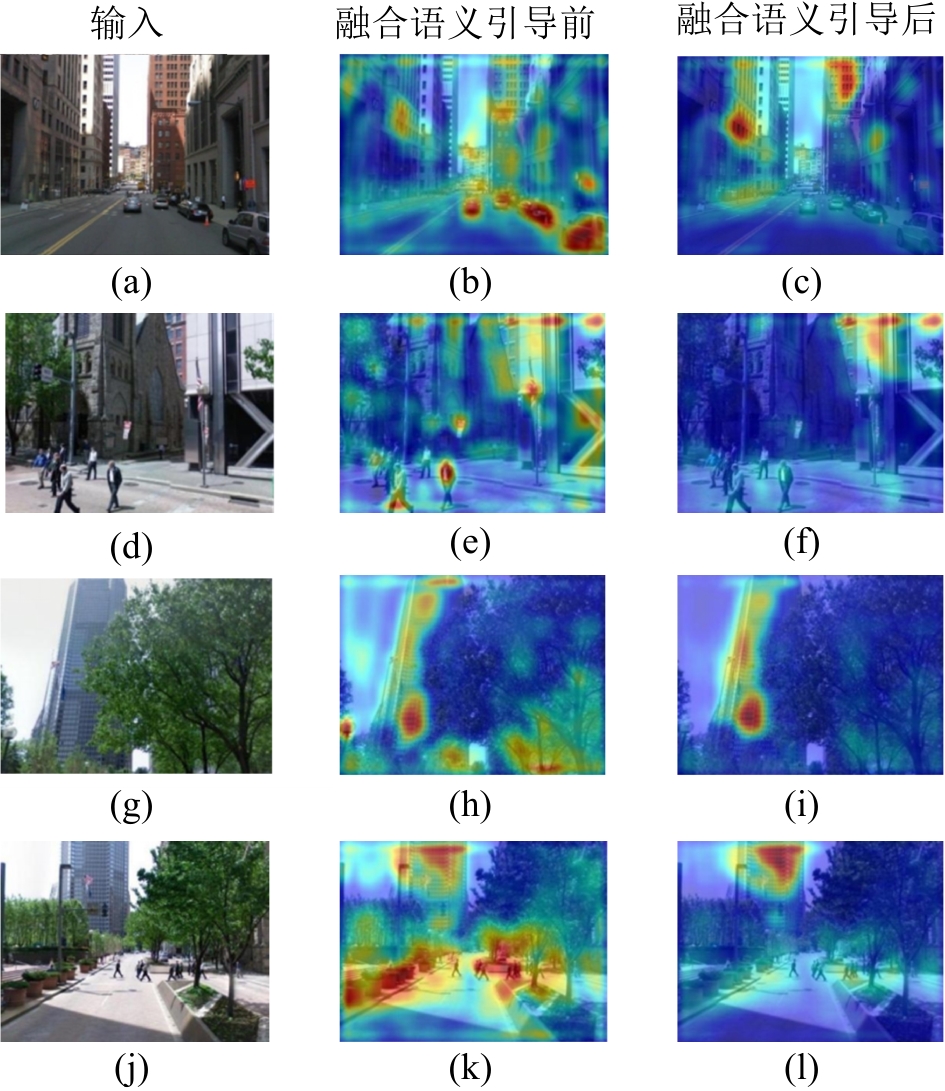
Table 4
Comparative results of the ablation experiment
| 方法 | Pittsburgh250K(test) | Tokyo 24/7 | ||||
|---|---|---|---|---|---|---|
| R@1 | R@5 | R@10 | R@1 | R@5 | R@10 | |
| P | 88.4 | 95.7 | 96.4 | 77.1 | 84.4 | 87.0 |
| P+ATML | 89.5 | 96.0 | 96.5 | 78.3 | 85.0 | 88.3 |
| P+语义引导的特征抑制模块 | 90.2 | 96.1 | 96.8 | 78.8 | 85.3 | 88.3 |
| P+语义引导的特征抑制模块+ATML | 90.7 | 96.3 | 96.1 | 79.2 | 85.7 | 89.4 |
| [1] | 侯毅. 基于深度卷积神经网络的移动机器人视觉地点识别[D]. 长沙: 国防科技大学, 2017. |
| Hou Yi. Visual Place Recognition with Deep Convolutional Neural Networks for Mobile Robots[D]. Changsha: National University of Defense Technology, 2017. | |
| [2] | 曾凡祥. 复杂环境下鲁棒实时目标跟踪技术研究[D]. 北京: 北京邮电大学, 2017. |
| Zeng Fanxiang. Robust and Real-time Visual Tracking Under Complex Scenarios[D]. Beijing: Beijing University of Posts and Telecommunications, 2017. | |
| [3] | 王博. 基于卷积神经网络的视觉地点识别算法研究[D]. 广州: 华南理工大学, 2021. |
| Wang Bo. Research on Visual Place Recognition Algorithm Based on Convolution Neural Network[D]. Guangzhou: South China University of Technology, 2021. | |
| [4] | Jégou Hervé, Perronnin Florent, Douze Matthijs, et al. Aggregating Local Image Descriptors into Compact Codes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(9): 1704-1716. |
| [5] | Sánchez Jorge, Perronnin Florent, Mensink Thomas, et al. Image Classification with the Fisher Vector: Theory and Practice[J]. International Journal of Computer Vision, 2013, 1053: 222-245. |
| [6] | Arandjelović Relja, Gronat Petr, Torii Akihiko, et al. NetVLAD: CNN Architecture for Weakly Supervised Place Recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(6): 1437-1451. |
| [7] | Tan Yanhai, Ji Peng, Zhang Yunzhou, et al. Learning Robust Representation and Sequence Constraint for Retrieval-based Long-term Visual Place Recognition[J]. Engineering Applications of Artificial Intelligence, 2024, 138, Part B: 109425. |
| [8] | Li Zhenyu, Xu Pengjie. Pyramid Transformer-based Triplet Hashing for Robust Visual Place Recognition[J]. Computer Vision and Image Understanding, 2024, 249: 104167 |
| [9] | Kim H J, Dunn E, Frahm J M. Learned Contextual Feature Reweighting for Image Geo-localization[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2017: 3251-3260. |
| [10] | Peng Guohao, Zhang Jun, Li Heshan, et al. Attentional Pyramid Pooling of Salient Visual Residuals for Place Recognition[C]//2021 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2021: 865-874. |
| [11] | Hausler Stephen, Garg Sourav, Xu Ming, et al. Patch-NetVLAD: Multi-scale Fusion of Locally-global Descriptors for Place Recognition[C]//2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2021: 14136-14147. |
| [12] | Wang Ruotong, Shen Yanqing, Zuo Weiliang, et al. TransVPR: Transformer-based Place Recognition with Multi-level Attention Aggregation[C]//2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2022: 13638-13647. |
| [13] | Sunderhauf Niko, Shirazi Sareh, Jacobson Adam, et al. Place Recognition with ConvNet Landmarks: Viewpoint-robust, Condition-robust, Training-free[C]// Robotics: Science and Systems XI. Rome, Italy: Robotics: Science and Systems Foundation, 2015: 1-10. |
| [14] | Kalantidis Y, Mellina C, Osindero S. Cross-dimensional Weighting for Aggregated Deep Convolutional Features[C]//Computer Vision – ECCV 2016 Workshops. Cham: Springer International Publishing, 2016: 685-701. |
| [15] | 刘沛津, 刘淑婕, 何林, 等. 基于平行全维动态注意力机制的视觉地点识别方法[J]. 液晶与显示, 2024, 39(9): 1233-1242. |
| Liu Peijin, Liu Shujie, He Lin, et al. Visual Place Recognition Method Based on Parallel Omni-dimensional Dynamic Attention Mechanism[J]. Chinese Journal of Liquid Crystals and Displays, 2024, 39(9): 1233-1242. | |
| [16] | Wang Xiaolong, Girshick R, Gupta A, et al. Non-local Neural Networks[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7794-7803. |
| [17] | Hu Jie, Shen Li, Sun Gang. Squeeze-and-excitation Networks[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7132-7141. |
| [18] | Schroff F, Kalenichenko D, Philbin J. FaceNet: A Unified Embedding for Face Recognition and Clustering[C]//2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2015: 815-823. |
| [19] | Xiong Yu, Xu Shixiong, Meng Gaofeng. Distance-ranking-based Weighted Triplet Loss for Visual Place Recognition[C]//2023 2nd International Conference on Artificial Intelligence, Human-Computer Interaction and Robotics (AIHCIR). Piscataway: IEEE, 2023: 94-100. |
| [20] | Leyva-Vallina María, Strisciuglio Nicola, Petkov Nicolai. Generalized Contrastive Optimization of Siamese Networks for Place Recognition[EB/OL]. (2023-04-20) [2024-12-20]. . |
| [21] | Simonyan Karen, Zisserman Andrew. Very Deep Convolutional Networks for Large-scale Image Recognition[EB/OL]. (2015-04-10) [2024-12-17]. |
| [22] | 孔德磊, 方正, 李昊佳, 等. 基于事件的端到端视觉位置识别弱监督网络架构[J]. 机器人, 2022, 44(5): 613-625. |
| Kong Delei, Fang Zheng, Li Haojia, et al. An End-to-end Weakly Supervised Network Architecture for Event-based Visual Place Recognition[J]. Robot, 2022, 44(5): 613-625. | |
| [23] | Chen L C, Zhu Yukun, Papandreou G, et al. Encoder-decoder with Atrous Separable Convolution for Semantic Image Segmentation[C]//Computer Vision-ECCV 2018. Cham: Springer International Publishing, 2018: 833-851. |
| [24] | Cordts Marius, Omran Mohamed, Ramos Sebastian, et al. The Cityscapes Dataset for Semantic Urban Scene Understanding[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2016: 3213-3223. |
| [25] | Torii Akihiko, Arandjelović Relja, Sivic Josef, et al. 24/7 Place Recognition by View Synthesis[C]//2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2015: 1808-1817. |
| [26] | Selvaraju R R, Cogswell M, Das A, et al. Grad-CAM: Visual Explanations from Deep Networks via Gradient-based Localization[J]. International Journal of Computer Vision, 2020, 128(2): 336-359. |
| [27] | Gan Wenjian, Zhou Yang, Hu Xiaofei, et al. Convolutional MLP Orthogonal Fusion of Multiscale Features for Visual Place Recognition[J]. Scientific Reports, 2024, 14(1): 11756. |
| [28] | Lowry Stephanie, Sünderhauf Niko, Newman P, et al. Visual Place Recognition: A Survey[J]. IEEE Transactions on Robotics, 2016, 32(1): 1-19. |
| [29] | Cai Yingfeng, Zhao Junqiao, Cui Jiafeng, et al. Patch-NetVLAD+: Learned Patch Descriptor and Weighted Matching Strategy for Place Recognition[C]//2022 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI). Piscataway: IEEE, 2022: 1-8. |
| [30] | Zheng Rui, Jiang Zuo, Ye Yibin, et al. An Adaptive Network Fusing Light Detection and Ranging Height-sliced Bird's-eye View and Vision for Place Recognition[J]. Engineering Applications of Artificial Intelligence, 2024, 137, Part B: 109230. |
| [1] | Wang Jun, Liu Min, Zhang Xiaochuan, Ding Yishan, Feng Juhui, Zhuang Ye. Modelling Method of Unmanned Vehicle Dynamics Based on Neural Network [J]. Journal of System Simulation, 2026, 38(4): 932-947. |
| [2] | Feng Xuejian, Ding Han, Tong Yiqi, Huo Chaoying, Zhang Yanjin. Simulation and Multi-perspective Recognition Algorithm for Typical Trajectory Shapes [J]. Journal of System Simulation, 2026, 38(3): 725-735. |
| [3] | Zou Changjun, Ge Zhiyu, Zhong Chenxi. Spatio-temporal Swin Transformer-based Flow-solid Coupling Interaction Sequence Image Prediction Network [J]. Journal of System Simulation, 2026, 38(1): 112-124. |
| [4] | Wang Bingheng, Liu Tingrui, Yang Fan, Zhang Huan, Li Wei, Ma Ping, Yang Ming. Research on Requirements and Methods for Intelligent Assessment of Simulation Credibility [J]. Journal of System Simulation, 2025, 37(7): 1710-1722. |
| [5] | Chen Kun, Chen Liang, Xie Jiming, Liu Fengbo, Chen Taixiong, Wei Lukuan. Simulation Study on Adaptive Signal Control of Deformed Intersection Based on LSTM-GNN [J]. Journal of System Simulation, 2025, 37(6): 1343-1351. |
| [6] | Jiang Dawei, Dong Yangyang, Zhang Lidong, Lu Xiao, Dong Chunxi. Research on Air Target Threat Assessment Technology Based on Deep Learning [J]. Journal of System Simulation, 2025, 37(3): 791-802. |
| [7] | Wang Xiao, Li Xiangyang, Liang Feng, Zhang Zhili. Research on Infrared and Visible Light Fusion Method Based on ResNet-50 and Laplacian Filtering [J]. Journal of System Simulation, 2025, 37(12): 3202-3211. |
| [8] | Hu yang, Li Zihao, Fu Deyi, Song Ziqiu, Fang Fang, Liu Jizhen. Deep Learning Modeling of Multi-scale Characteristics of Large-scale Wind Turbine Gearbox [J]. Journal of System Simulation, 2025, 37(10): 2454-2468. |
| [9] | Gu Hao, Wang Jiayu, Xiong Weili. Soft Sensor Modeling Based on Improved Transformer in Dual-stream Framework [J]. Journal of System Simulation, 2025, 37(10): 2594-2604. |
| [10] | Guo Yecai, Tong Shuang. A Multimodal Residual Spatial-temporal Fusion Model Based on Automatic Sleep Classification [J]. Journal of System Simulation, 2024, 36(9): 2065-2074. |
| [11] | Liu Zesen, Bi Sheng, Guo Chuanhong, Wang Yankui, Dong Min. Deep Learning Based Local Path Planning Method for Moving Robots [J]. Journal of System Simulation, 2024, 36(5): 1199-1210. |
| [12] | Wei Jinyang, Wang Keping, Yang Yi, Fei Shumin. Incremental Image Dehazing Algorithm Based on Multiple Transfer Attention [J]. Journal of System Simulation, 2024, 36(4): 969-980. |
| [13] | Yang Zhe, Cui Yinghan, Guo Lingxi, Li Jiaxin, Wu Xusheng. Search Technology for Aircraft Debris Integrating Data Augmentation and Deep Learning Algorithm [J]. Journal of System Simulation, 2024, 36(10): 2238-2245. |
| [14] | Li Chen, He Ming, Dong Chen, Li Wei. Action Recognition Model of Directed Attention Based on Cosine Similarity [J]. Journal of System Simulation, 2024, 36(1): 67-82. |
| [15] | Zhang Fengquan, Cao Duo, Ma Xiaohan, Chen Baijun, Zhang Jiangxiao. Style Transfer Network for Generating Opera Makeup Details [J]. Journal of System Simulation, 2023, 35(9): 2064-2076. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
