

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (10): 2300-2313.doi: 10.16182/j.issn1004731x.joss.23-0621
• Papers • Previous Articles Next Articles
Zhao Yu, Yang Caijin, Wang Tanming, Xu Jing, Zhou Shuai
Received:2023-05-25
Revised:2023-07-12
Online:2024-10-15
Published:2024-10-18
Contact:
Yang Caijin
CLC Number:
Zhao Yu, Yang Caijin, Wang Tanming, Xu Jing, Zhou Shuai. Path Following Control and Simulation Analysis of Multi-articulated Vehicles[J]. Journal of System Simulation, 2024, 36(10): 2300-2313.

Fig. 1
Expected position of multi-articulated vehicles
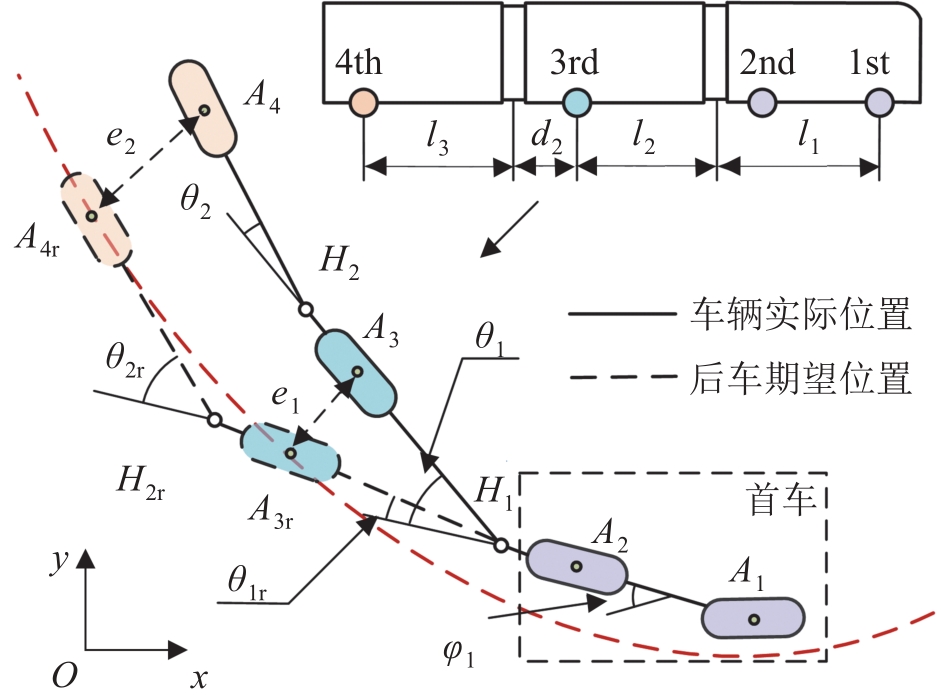

Fig. 2
Flowchart for searching expected position of the 3rd axle
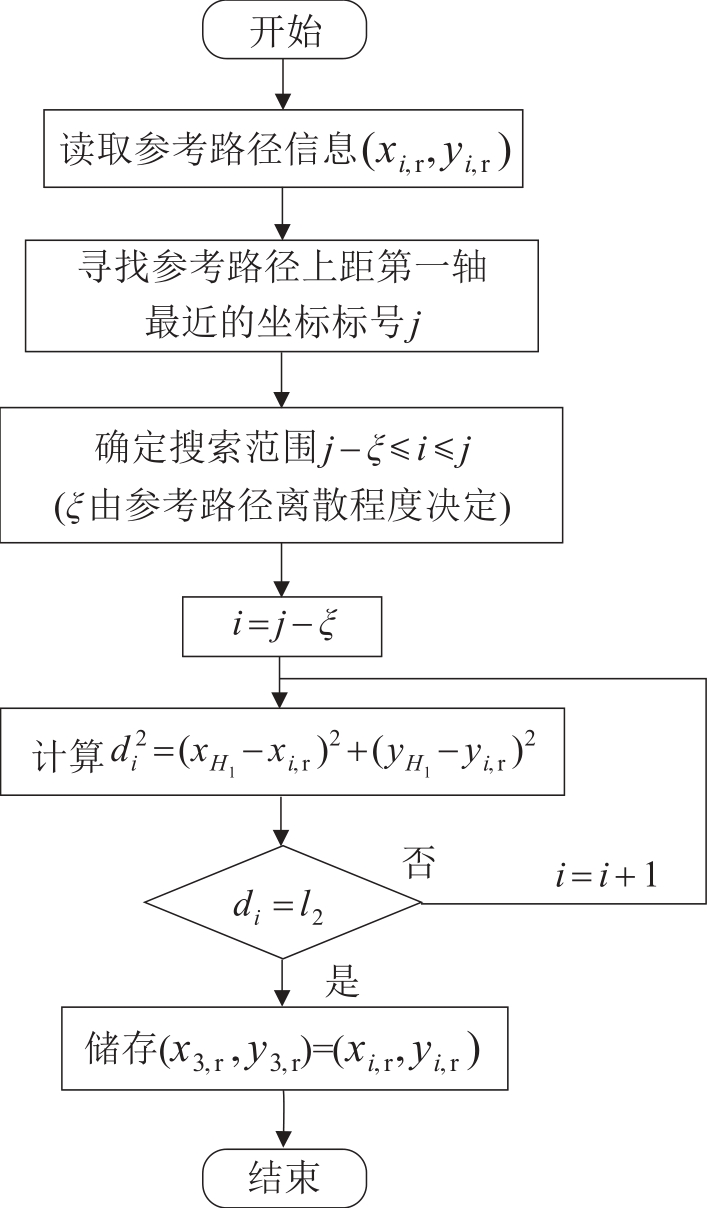

Fig. 3
Active steering controller
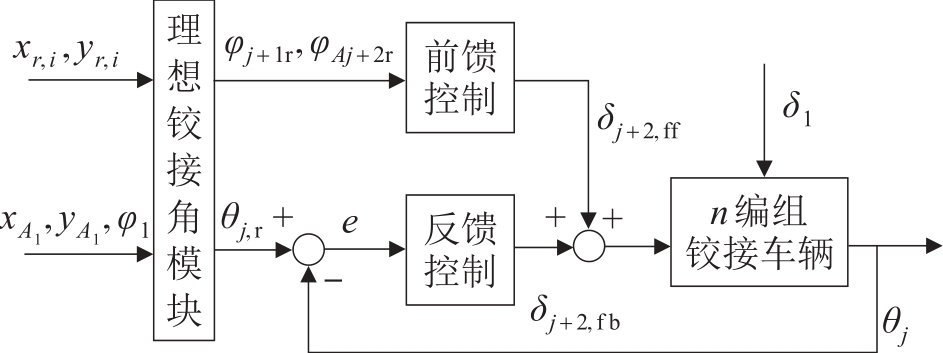
Fig. 4
Feedforward control of vehicle-road geometric position
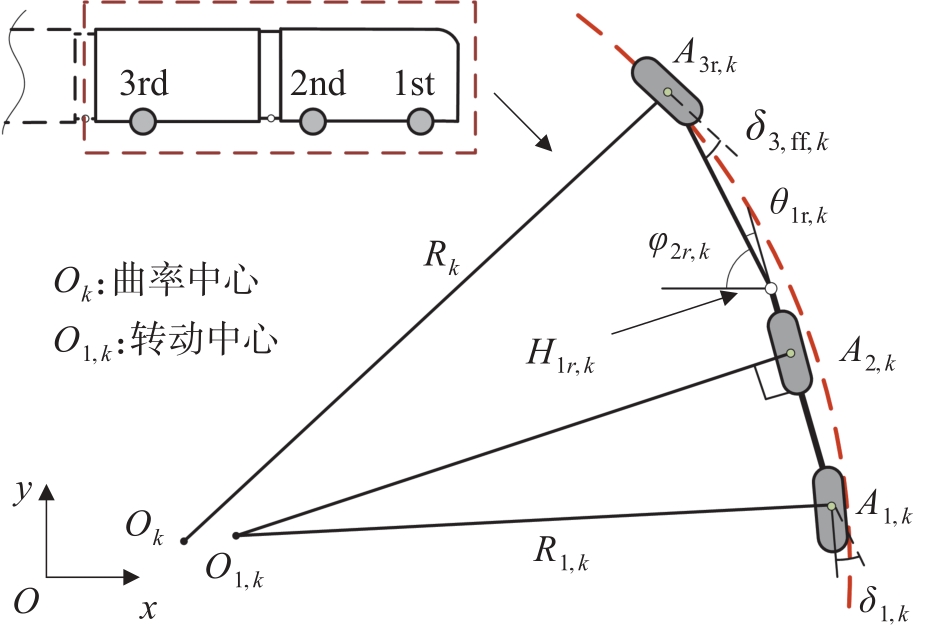
Fig. 5
RBF neural network structure
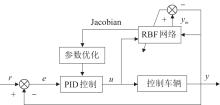
Fig. 6
RBF neural network structure PID
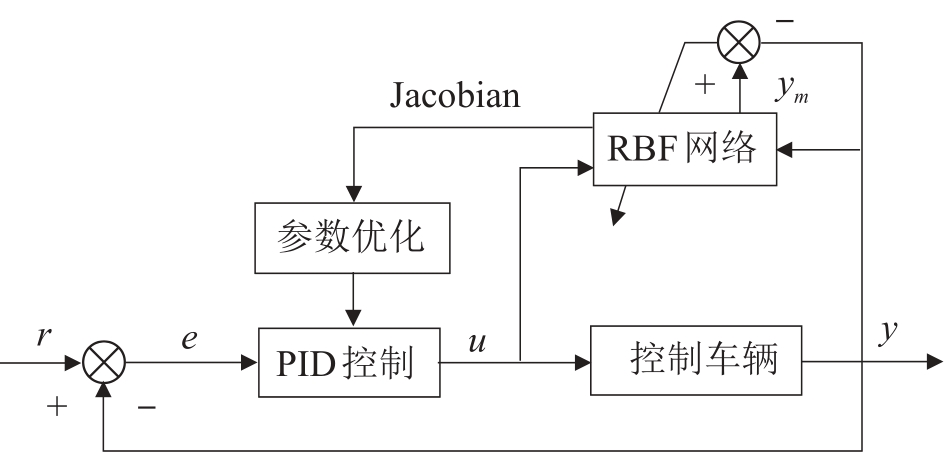
Table 1
Vehicle parameters[20]
| 车辆参数 | 量值 |
|---|---|
| 首车质量m1/kg | 8 935 |
| 中间车质量m2/kg | 9 275 |
| 尾车质量m3/kg | 9 275 |
| 首车质心距第一轴距离a1/m | 1.8 |
| 首车质心距第二轴距离b1/m | 3.4 |
| 第一铰接点距第一轴距离l1/m | 7.45 |
| 第一铰接点距第三轴距离l2/m | 7.45 |
| 中间车质心距第三轴距离b2/m | 3.5 |
| 第二铰接点距第三轴距离d2/m | 2.15 |
| 第二铰接点距第四轴距离l3/m | 7.45 |
| 尾车质心距第四轴距离b3/m | 3.5 |

Fig. 7
Validation of control method effectiveness
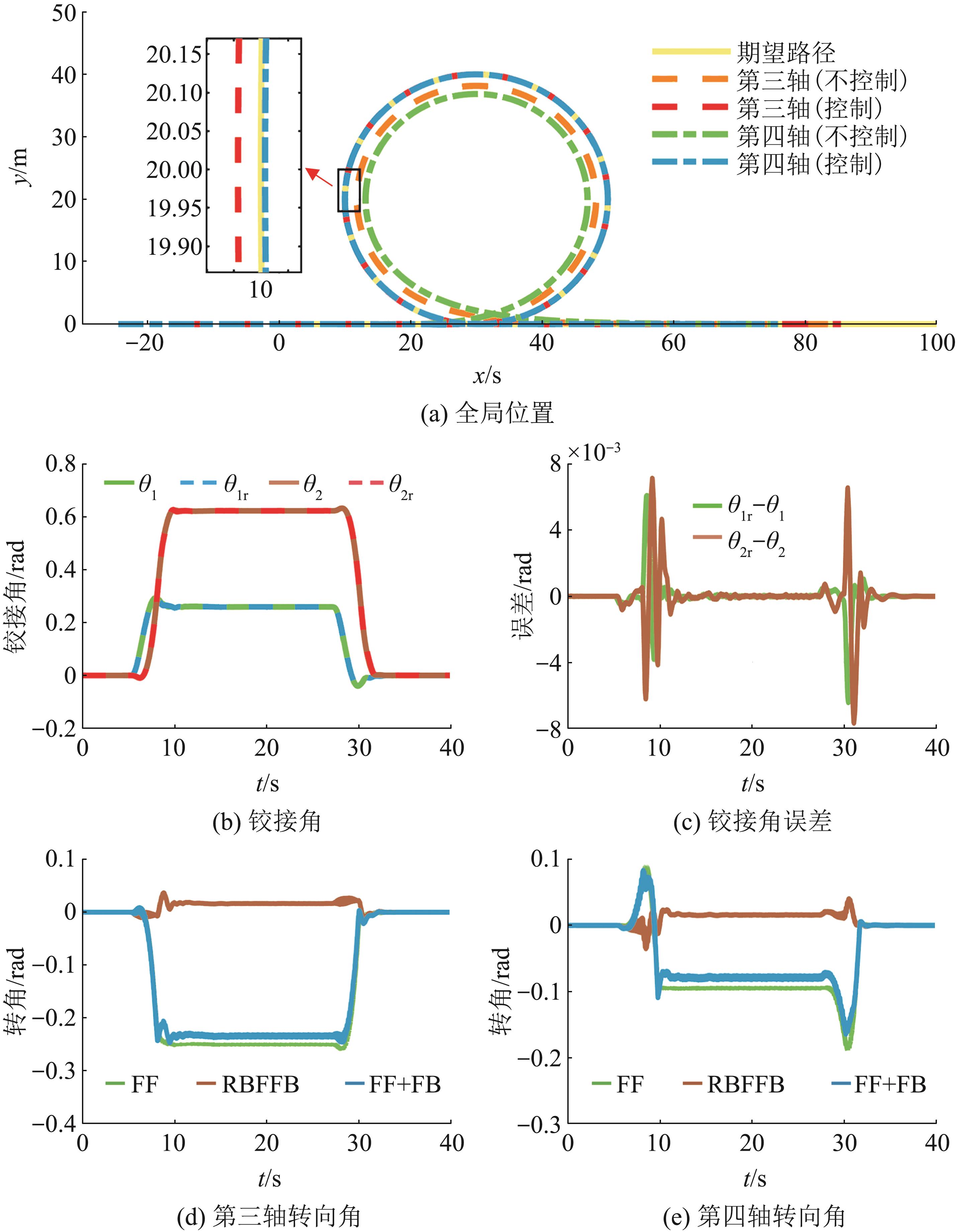
Fig. 8
Validation of the effectiveness of improved ideal articulation angle
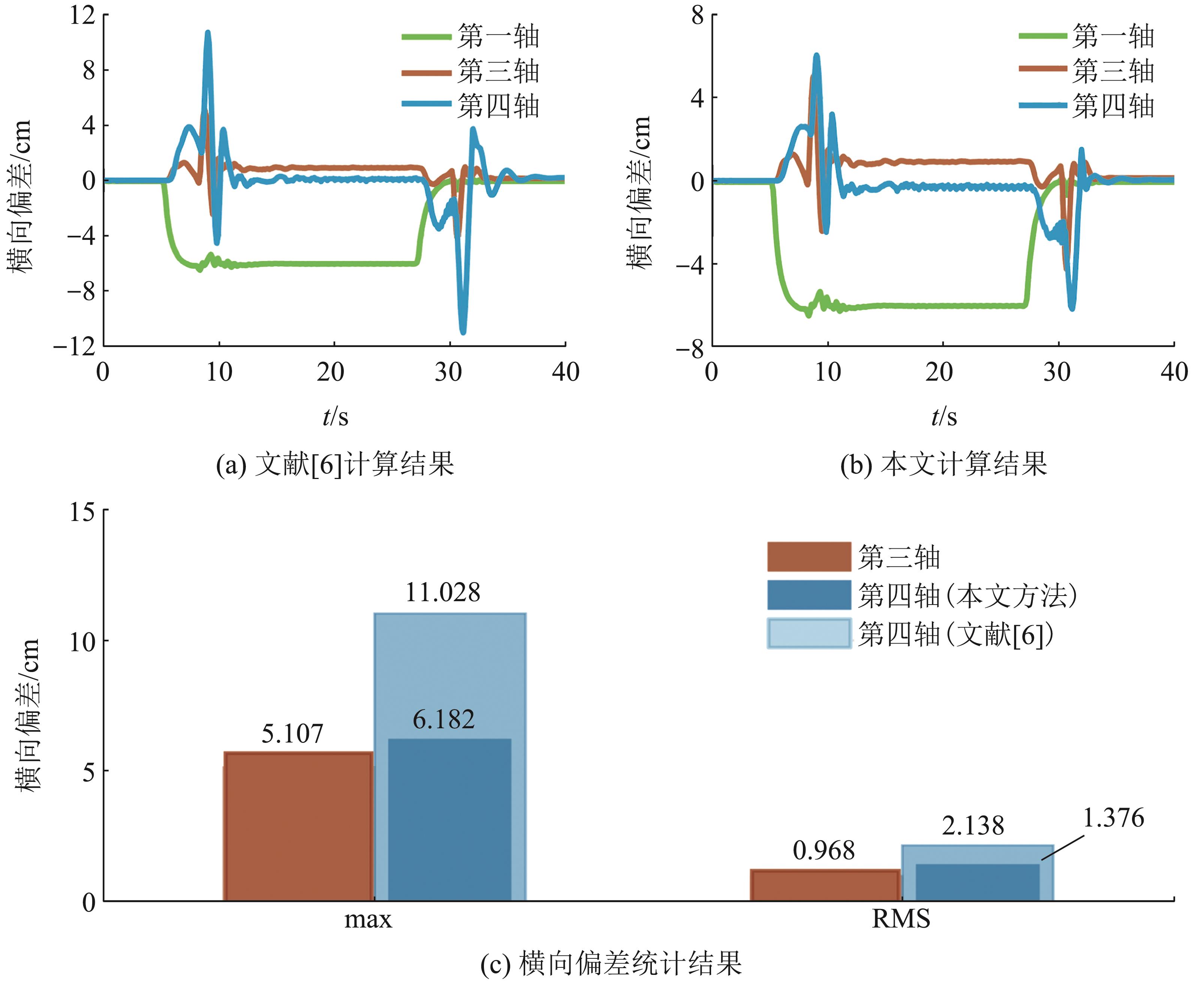
Table 2
Comparison of tracking results between the lead vehicle's trajectory and the reference path
| 参数 | 首车轨迹 | 参考路径 | 对比结果/% | |
|---|---|---|---|---|
| 第三轴横向偏差/cm | max | 6.392 | 5.042 | -21.12 |
| RMS | 3.821 | 0.967 | -74.69 | |
| 第四轴横向偏差/cm | max | 12.312 | 6.182 | -49.79 |
| RMS | 4.962 | 1.376 | -72.27 | |
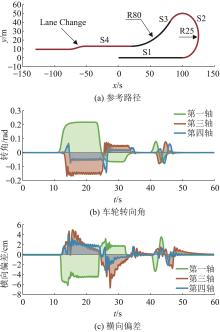
Fig. 9
Simulation results of composite curves
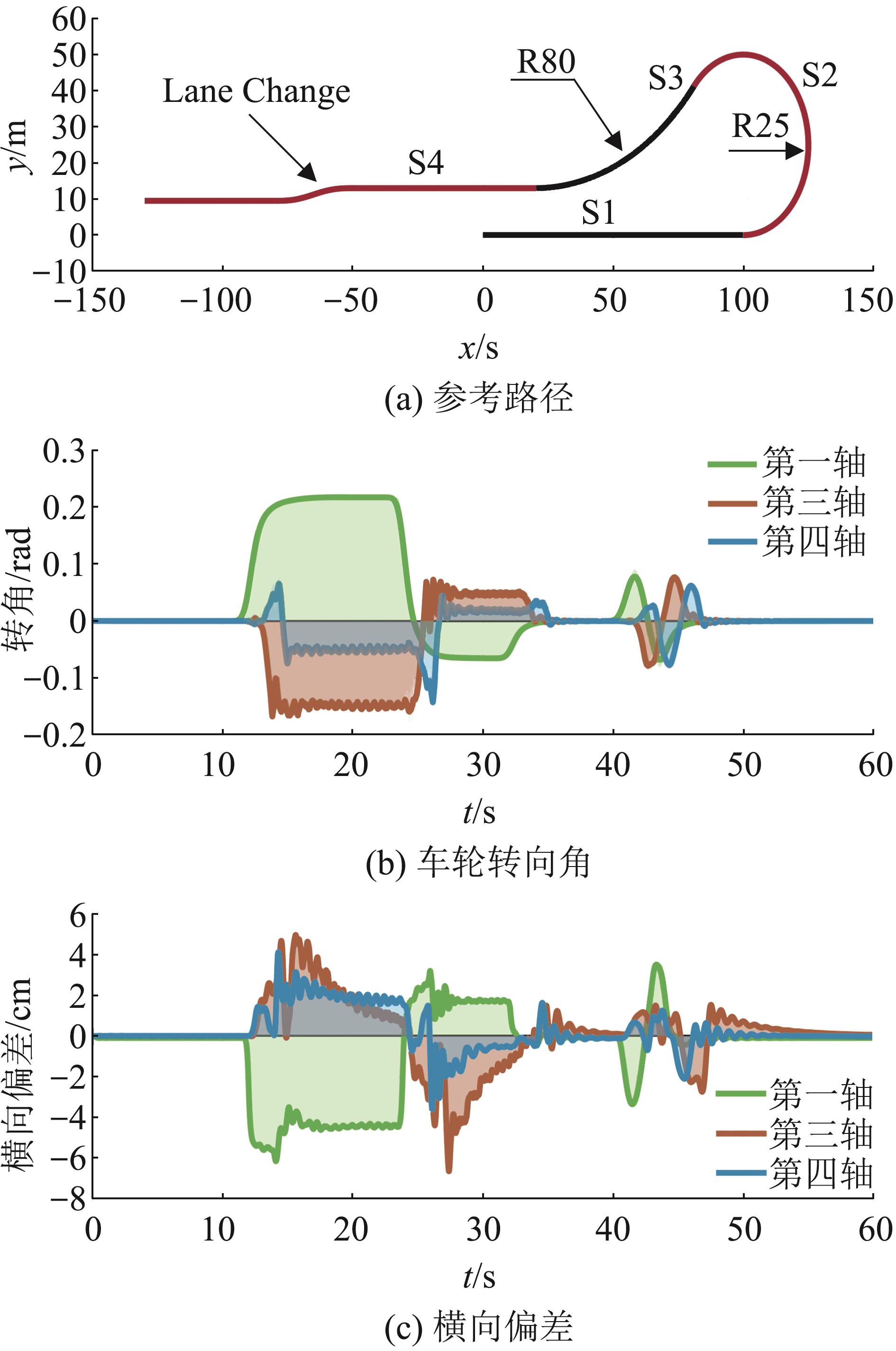
Fig. 10
Comparison results of different methods
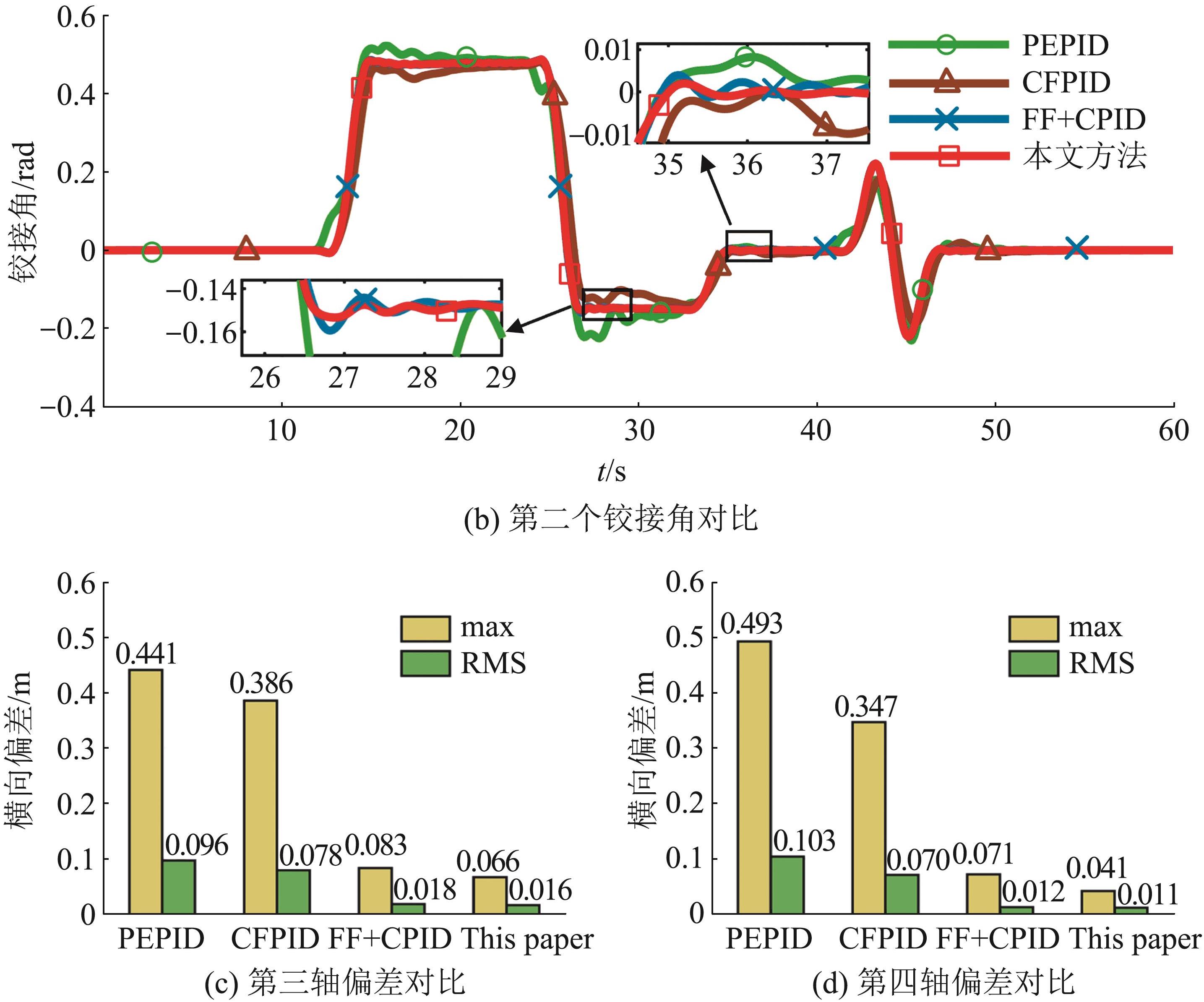

Fig. 11
Comparison results of different speeds
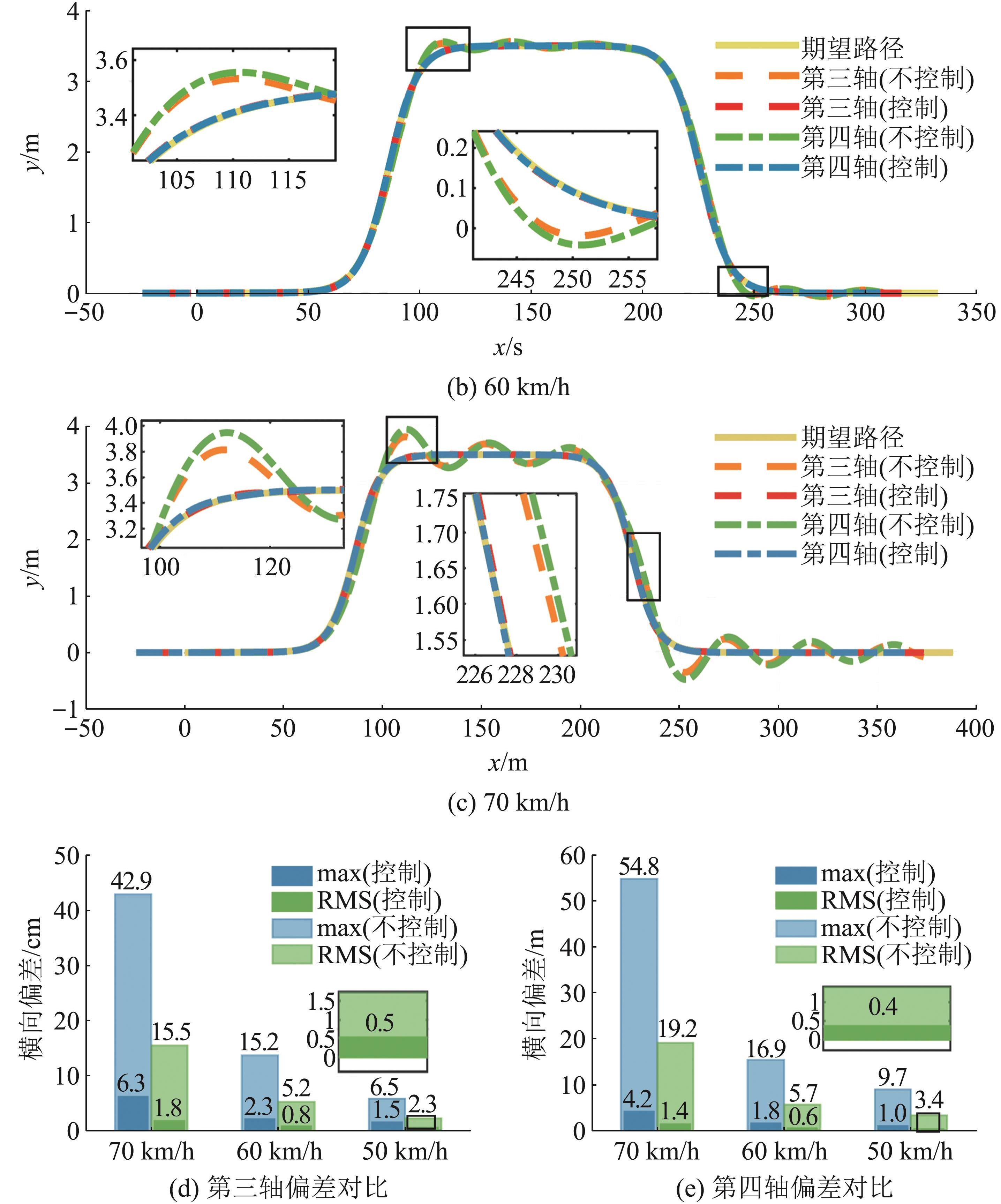

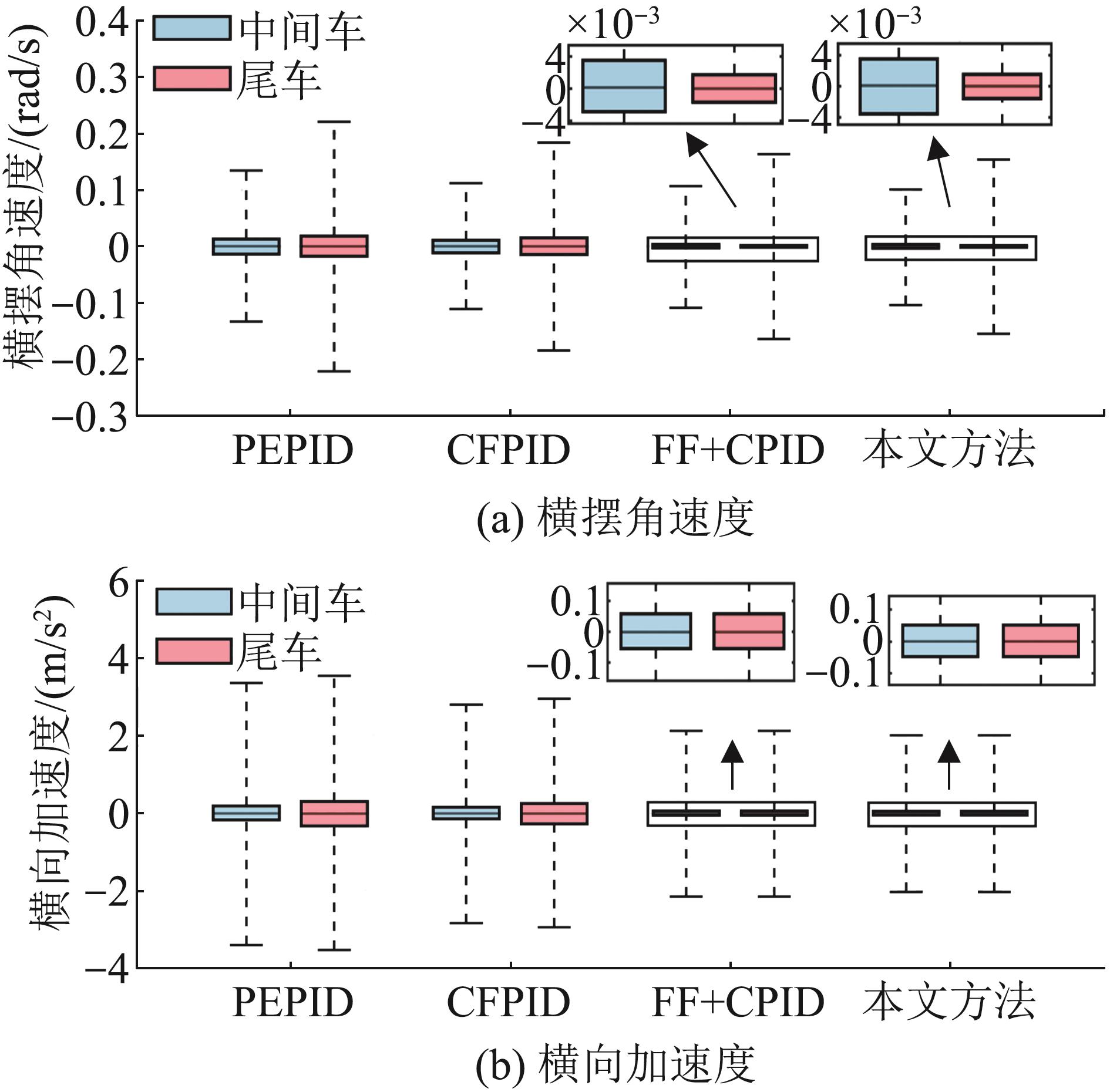
Fig. 12
Box plots of yaw rate and lateral acceleration for different methods
| 1 | Maciej Marcin Michałek, Patkowski Bartosz, Gawron Tomasz. Modular Kinematic Modelling of Articulated Buses[J]. IEEE Transactions on Vehicular Technology, 2020, 69(8): 8381-8394. |
| 2 | 谭伟, 刘景升, 祖晖, 等. 参数不确定和扰动下智能汽车路径跟踪控制[J]. 浙江大学学报(工学版), 2023, 57(4): 702-711. |
| Tan Wei, Liu Jingsheng, Zu Hui, et al. Intelligent Vehicle Path Tracking Control Under Parametric Uncertainties and External Disturbances[J]. Journal of Zhejiang University(Engineering Science), 2023, 57(4): 702-711. | |
| 3 | Ni Zhituo, He Yuping. Design and Validation of a Robust Active Trailer Steering System for Multi-trailer Articulated Heavy Vehicles[J]. Vehicle System Dynamics, 2019, 57(10): 1545-1571. |
| 4 | Filipe Marques Barbosa, Lucas Barbosa Marcos, Maíra Martins da Silva, et al. Robust Path-following Control for Articulated Heavy-duty Vehicles[J]. Control Engineering Practice, 2019, 85: 246-256. |
| 5 | Deng Zhaowen, Zhao Youqun, Wang Baohua, et al. A Preview Driver Model Based on Sliding-mode and Fuzzy Control for Articulated Heavy Vehicle[J]. Meccanica, 2022, 57(8): 1853-1878. |
| 6 | Ritzen Paul, Roebroek Erik, Nathan van de Wouw, et al. Trailer Steering Control of a Tractor-trailer Robot[J]. IEEE Transactions on Control Systems Technology, 2016, 24(4): 1240-1252. |
| 7 | Kural Karel, Hatzidimitris Pavlos, Nathan van de Wouw, et al. Active Trailer Steering Control for High-capacity Vehicle Combinations[J]. IEEE Transactions on Intelligent Vehicles, 2017, 2(4): 251-265. |
| 8 | 任利惠, 李稳, 冷涵, 等. 轮胎式轨道交通车辆动力学研究现状与挑战[J]. 交通运输工程学报, 2021, 21(6): 8-30. |
| Ren Lihui, Li Wen, Leng Han, et al. Research on Dynamics of Rail Transit Vehicle with Tire Running Gears: State-of-arts and Challenges[J]. Journal of Traffic and Transportation Engineering, 2021, 21(6): 8-30. | |
| 9 | Yuan Xiwen, Huang Ruipeng, Zhang Xinrui, et al. Development and Validation of an Automatic Steering Control System for Rubber-tire Transit Revenue Service[C]//2019 IEEE Vehicle Power and Propulsion Conference (VPPC). Piscataway: IEEE, 2019: 1-6. |
| 10 | Feng Jianghua, Hu Yunqing, Yuan Xiwen, et al. Development and Validation of an Automatic All-wheel Steering System for Multiple-articulated Rubber-tire Transit[J]. IET Electrical Systems in Transportation, 2021, 11(3): 227-240. |
| 11 | Yin Zhonghui, Zhang Jiye, Lu Haiying. Establishment and Comparison of a Spatial Dynamics Model for Virtual Track Train with Different Steering Modes[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2021, 235(3): 481-498. |
| 12 | Zhang Dehua, Yang Caijin, Zhang Weihua, et al. A Novel Tracking Control Method for the Distributed-drive and Active-steering Articulated Virtual Rail Train[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2022, 236(2): 418-440. |
| 13 | 孙帮成, 刘志明, 崔涛, 等. 一种汽车列车结构及其路径跟踪控制方法[J]. 机械工程学报, 2018, 54(24): 181-188. |
| Sun Bangcheng, Liu Zhiming, Cui Tao, et al. New Structure for Train-like Vehicle and Its Path Tracking Method[J]. Journal of Mechanical Engineering, 2018, 54(24): 181-188. | |
| 14 | 孙帮成, 刘志明, 崔涛, 等. 汽车列车多轴转向控制方法及仿真研究[J]. 机械工程学报, 2019, 55(4): 154-163. |
| Sun Bangcheng, Liu Zhiming, Cui Tao, et al. Research on Multi-axis Steering Control Method and Simulation of Train-like Vehicle[J]. Journal of Mechanical Engineering, 2019, 55(4): 154-163. | |
| 15 | 崔涛, 王淇, 刘学刚, 等. 虚拟轨道列车多轴协同预瞄循迹控制方法[J]. 北京交通大学学报, 2022, 46(1): 139-146. |
| Cui Tao, Wang Qi, Liu Xuegang, et al. Multi-axle Coordination-based Pre-targeting Path-tracking Control Method for Virtual Railway Vehicles[J]. Journal of Beijing Jiaotong University, 2022, 46(1): 139-146. | |
| 16 | Shen Lu, Zhang Liwei. Trajectory Following Control of Modern Configurable Multi-articulated Urban Bus Based on Model Predictive Control[J]. Sustainability, 2022, 14(24): 16619. |
| 17 | Leng Han, Ren Lihui, Ji Yuanjin. Cascade Modular Path Following Control Strategy for Gantry Virtual Track Train: Time-delay Stability and Forward Predictive Model[J]. IEEE Transactions on Vehicular Technology, 2022, 71(7): 6969-6983. |
| 18 | 张众华, 杨蔡进, 张卫华. 虚拟轨道列车超螺旋滑模自适应导向控制[J]. 交通运输工程学报, 2023, 23(5): 163-182. |
| Zhang Zhonghua, Yang Caijin, Zhang Weihua. Adaptive Guidance Control of Super-twisting Sliding Mode for Virtual Track Train[J]. Journal of Traffic and Transportation Engineering, 2023, 23(5): 163-182. | |
| 19 | 赵治国, 胡昊锐, 周良杰, 等. 紧急避撞路径规划及其跟踪驾驶员转向模型[J]. 同济大学学报(自然科学版), 2020, 48(7): 998-1006. |
| Zhao Zhiguo, Hu Haorui, Zhou Liangjie, et al. Emergency Collision Avoidance Path Planning and Driver Steering Tracking Model[J]. Journal of Tongji University(Natural Science), 2020, 48(7): 998-1006. | |
| 20 | 李前明, 杨蔡进, 李艳, 等. 基于协同转向的铰接车辆轨迹跟随控制研究[J]. 动力学与控制学报, 2023, 21(2): 87-95. |
| Li Qianming, Yang Caijin, Li Yan, et al. Research on Trajectory Following Control of Articulated Vehicle Based on Cooperative Active Steering[J]. Journal of Dynamics and Control, 2023, 21(2): 87-95. | |
| 21 | 范存礼, 戴娟, 刘海涛, 等. 基于神经网络与分数阶滑模的行星进入段轨迹跟踪控制[J]. 系统仿真学报, 2021, 33(11): 2697-2703. |
| Fan Cunli, Dai Juan, Liu Haitao, et al. Trajectory Tracking Control of Planetary Entry Phase Based on Neural Network and Fractional Sliding Mode[J]. Journal of System Simulation, 2021, 33(11): 2697-2703. | |
| 22 | 尹智帅, 何嘉雄, 聂琳真, 等. 基于优化算法的自动驾驶车辆纵向自适应控制[J]. 系统仿真学报, 2021, 33(2): 409-420. |
| Yin Zhishuai, He Jiaxiong, Nie Linzhen, et al. Longitudinal Adaptive Control of Autonomous Vehicles Base on Optimization Algorithm[J]. Journal of System Simulation, 2021, 33(2): 409-420. |
| [1] | Zhang Xin, Zhang Ping, Zhang Chen, Liu Wei, Han Boyang. Research on Calculation Model of Excavation Resistance Under Heterogeneous Soil Conditions [J]. Journal of System Simulation, 2026, 38(5): 1320-1332. |
| [2] | Wang Xin, Cui Chenggang, Wang Xiangxiang, Zhu Ping. Research on Economic Dispatching Strategy of CHP Units Based on SRL [J]. Journal of System Simulation, 2025, 37(4): 968-981. |
| [3] | Zhang Peng, Feng Ke, Gong Jiancheng, Yang Xiaoqiang, Shen Jinxing. Combat Effectiveness Evaluation of Air Defense Missile Weapon System Based on RBF Neural Network [J]. Journal of System Simulation, 2025, 37(2): 529-540. |
| [4] | Li Jing, Zhang Taotao, Jin Kai, Yuan Shengzhi, Zha Zilong. Time-varying RBF Neural Network-based Controller Design for a Class of Time-varying Nonlinear Systems [J]. Journal of System Simulation, 2023, 35(10): 2223-2236. |
| [5] | Wu Xiaolong, Xia Fugen, Chen Jing, Xu Jia. Autonomous Vehicle Path Tracking Control System Based on Energy Optimization [J]. Journal of System Simulation, 2022, 34(1): 163-169. |
| [6] | Lifeng Zhang, Yu Miao. A High Resolution Reconstruction Method of Temperature Distribution in Acoustic Tomography [J]. Journal of System Simulation, 2022, 34(09): 2065-2073. |
| [7] | Gao Shengdong, Yu Xin. Co-simulation of Parallel Computing of Disc Temperature Distributed Parameter System Cooling Rate Control [J]. Journal of System Simulation, 2021, 33(8): 1839-1845. |
| [8] | Li Zhongqi, Xing Yueshuang. Research on Precision Parking Control Method for EMU Inbound Process [J]. Journal of System Simulation, 2021, 33(1): 149-158. |
| [9] | Zhang Qing, Xia Hua, Yang Ning, Qin Xianrong, Sun Yuantao. Modeling and Co-simulation of Novel Electric Heave Compensation System [J]. Journal of System Simulation, 2018, 30(8): 2973-2981. |
| [10] | Liu Huibo, Liu Mu. Neural Network Minimun Parameter Sliding Control of Blood Pump Based on Heart Rate [J]. Journal of System Simulation, 2018, 30(5): 1796-1802. |
| [11] | Shi Weiguo, Wang Li, Shao Cheng. Variable Sampling Period Scheduling Algorithm Based on Grey Neural Networks with Resource-constrained System [J]. Journal of System Simulation, 2018, 30(4): 1272-1278. |
| [12] | Wei Xiang, Li Benwei, Yang Xinyi, Wang Xingbo. Fault Co-simulation of Fuel Regulator in a Certain Type of Turbofan Engine [J]. Journal of System Simulation, 2018, 30(10): 3923-3932. |
| [13] | Liu Xiaolin, Wang Chunting. Research of Strategy to Restrain Surplus Force of Aircraft Rudder Electro-Hydraulic Loading System [J]. Journal of System Simulation, 2017, 29(2): 409-417. |
| [14] | Chen Gang, Zhou Qicai, Wu Jing, Yan Nan. Research for Co-simulation of 7DOF Manipulator Based on Adams and Matlab [J]. Journal of System Simulation, 2017, 29(1): 99-106. |
| [15] | Wu Qinghui, Shen Qinghuan, Wang Xinjun. Research on Modeling of Pump Model Based on RBF Neural Network [J]. Journal of System Simulation, 2016, 28(4): 800-805. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
