

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (1): 40-53.doi: 10.16182/j.issn1004731x.joss.24-0920
• Special Column:Modeling,Simulation and Application for Intelligent Unmanned System • Previous Articles Next Articles
Wu Yuxin1,2, Zhang Zhilong1,2, Liu Aoxu1, Zou Jiangwei1, LI Chuwei1,2
Received:2024-08-20
Revised:2024-10-13
Online:2025-01-20
Published:2025-01-23
Contact:
Zhang Zhilong
CLC Number:
Wu Yuxin, Zhang Zhilong, Liu Aoxu, Zou Jiangwei, LI Chuwei. Moving Target Velocity Measurement Method Based on Multi-view Observation Optimization of UAV Image[J]. Journal of System Simulation, 2025, 37(1): 40-53.
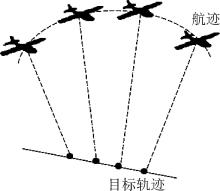
Fig. 1
Schematic diagram of target speed measurement
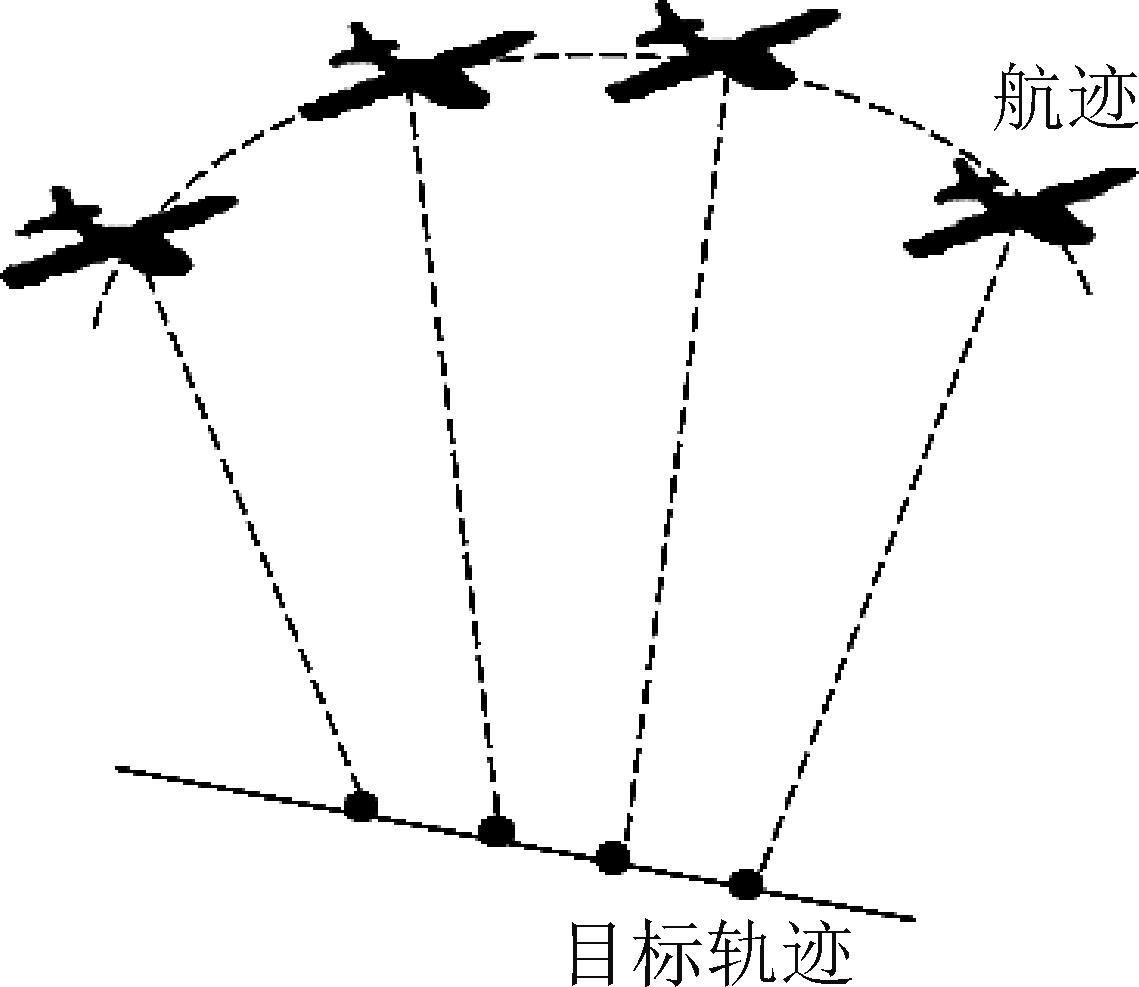
Fig. 2
Conversion diagram between G1 and G2 series

Fig. 3
Schematic diagram of carrier coordinate system
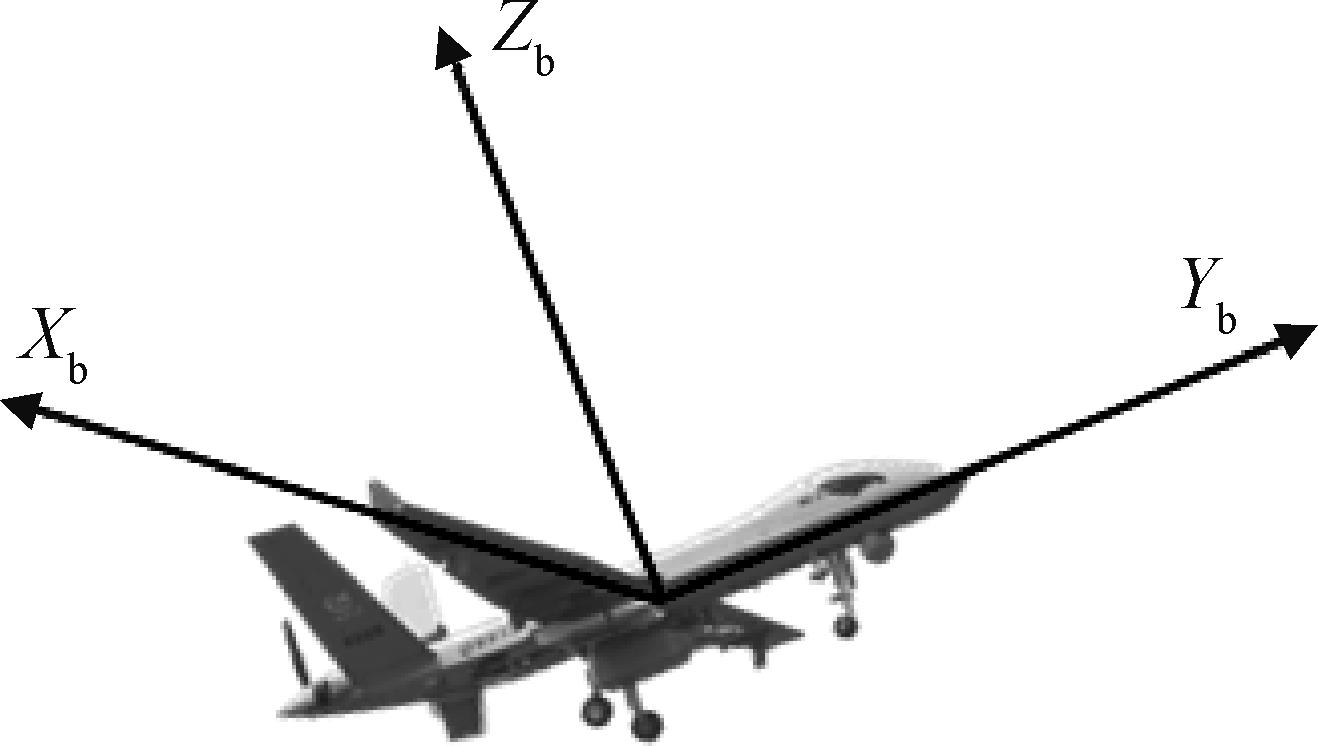
Fig. 4
Image physics-pixel coordinate system conversion diagram
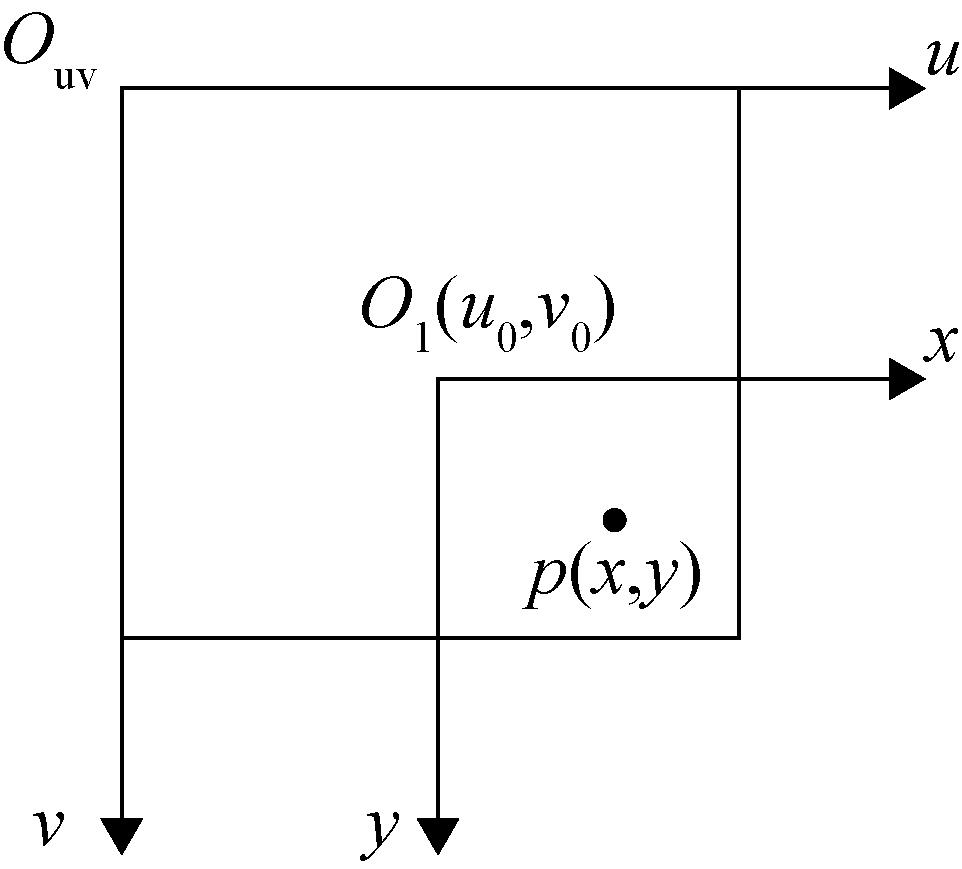
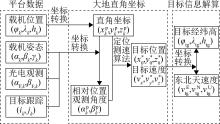
Fig. 5
Algorithm flow chart
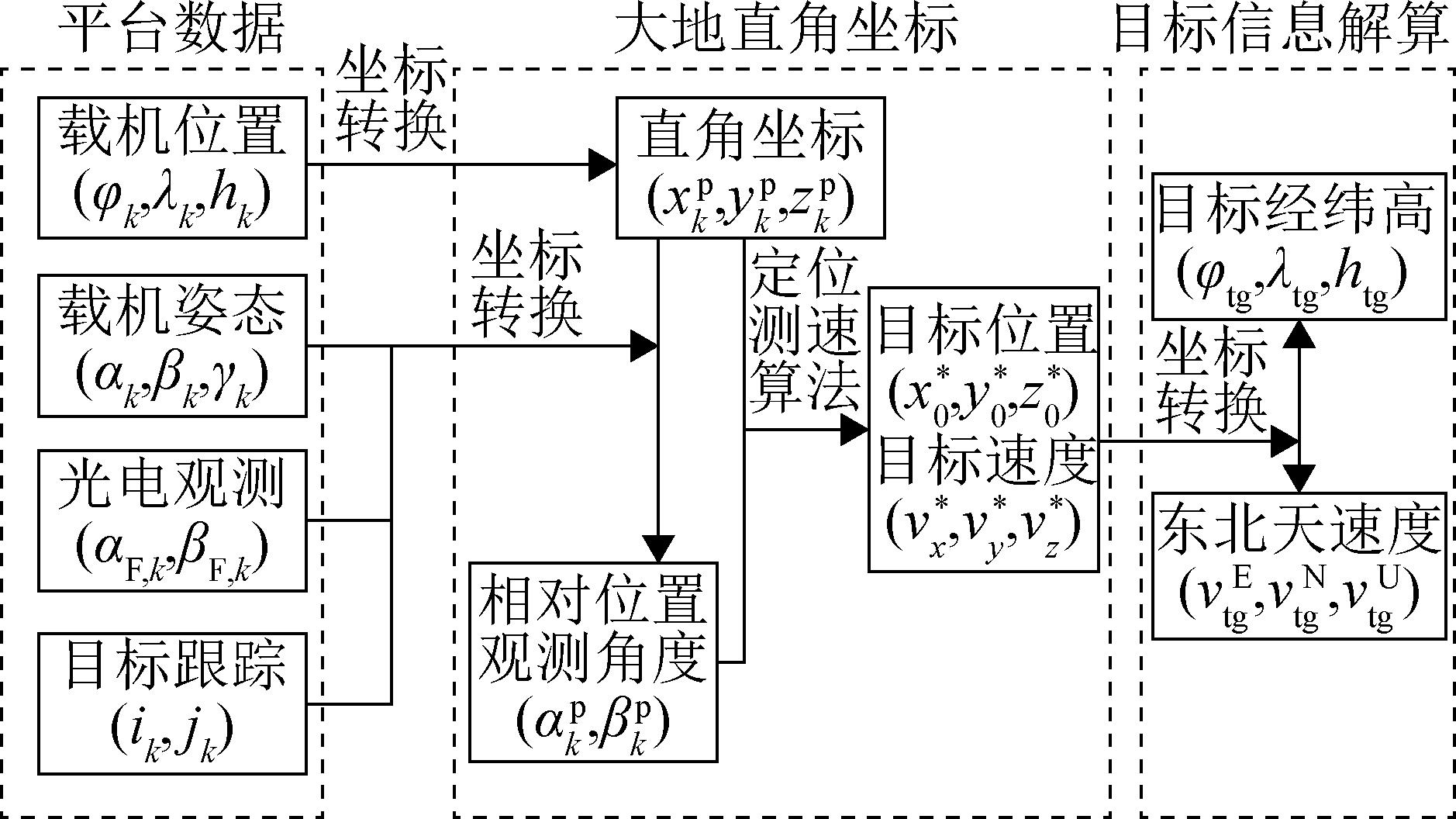
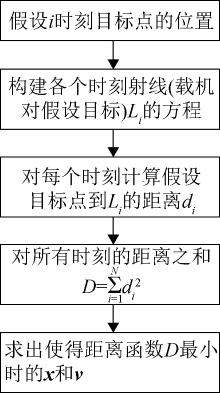
Fig. 6
Calculation flow based on least squares method
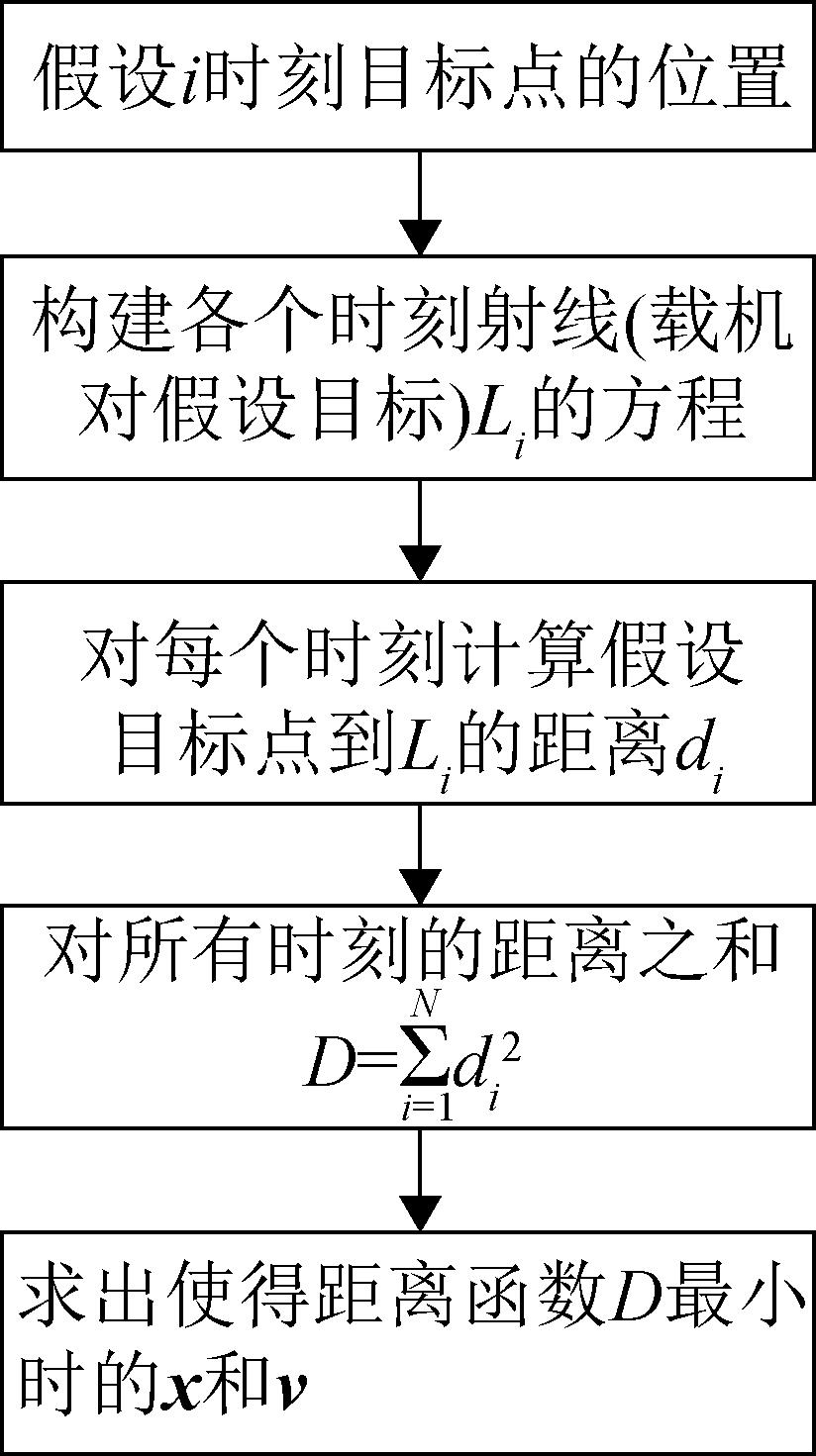
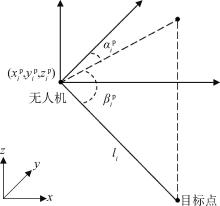
Fig. 7
Diagram of ray li representation at time i
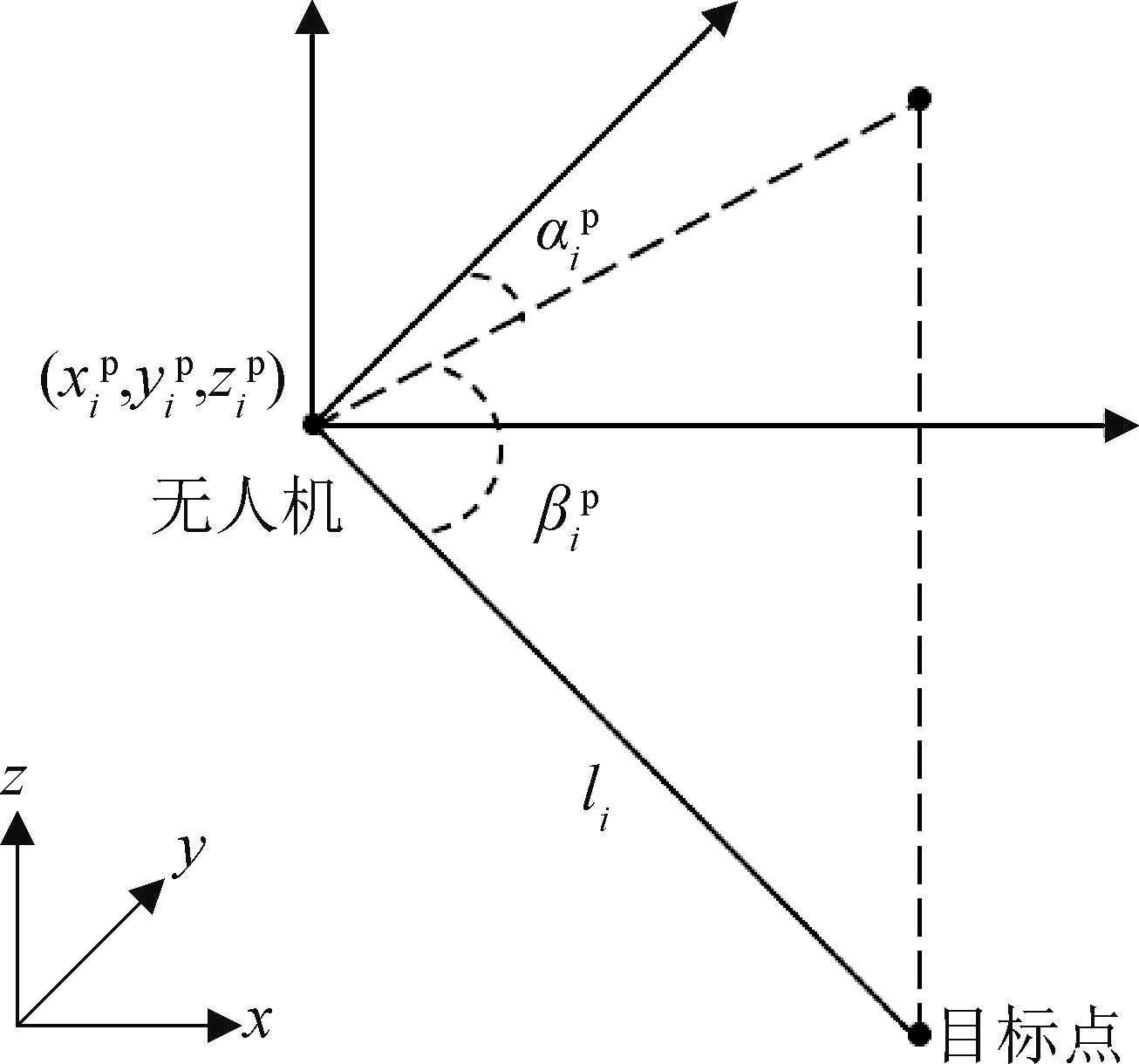
Table 1
Simulation parameter settings
| 参数 | 误差标准差 |
|---|---|
| 无人机x向坐标 | 5 |
| 无人机y向坐标 | 5 |
| 无人机z向坐标 | 5 |
| 无人机航向角 | 0.2 |
| 无人机俯仰角 | 0.1 |
| 无人机横滚角 | 0.1 |
| 相机方位角 | 0.1 |
| 相机俯仰角 | 0.1 |
Table 2
Target ground truth setting
| 初始位置 | 纬度/(°) | 经度/(°) | 高度/m |
|---|---|---|---|
| 39.836 590 | 97.291 320 | 2 223.000 000 | |
| 运动速度/(m/s) | 东向 | 北向 | 天向 |
| 20 | 20 | 0 |

Fig. 8
Position relationship diagram in ScenarioⅠ
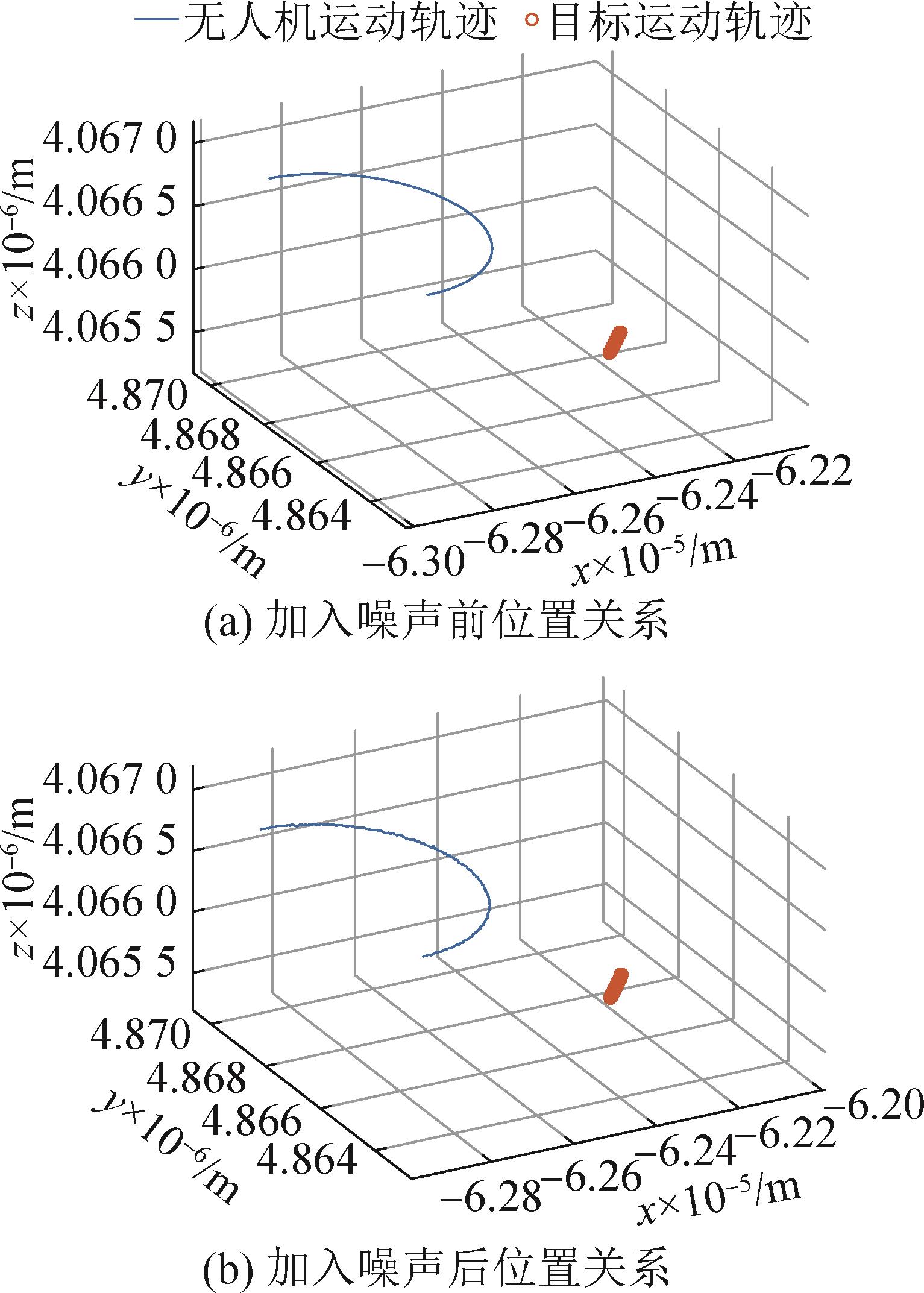
Table 3
Scenario Ⅰ speed calculation results
| 指标 | 东向 | 北向 | 天向 |
|---|---|---|---|
| 测量值 | 20.231 3 | 20.159 9 | 0.155 2 |
| 误差 | 0.231 3 | 0.159 9 | 0.155 2 |
Table 4
Scenario Ⅰ speed error distribution results
| 指标 | 东向 | 北向 | 天向 |
|---|---|---|---|
| 误差均值 | 0.298 7 | 0.024 2 | -0.019 7 |
| 误差标准差 | 0.427 7 | 0.482 9 | 0.205 9 |
Table 5
Scenario Ⅰ location calculation results
| 指标 | 纬度 | 经度 | 高度 |
|---|---|---|---|
| 测量值 | 39.836 564° | 97.291 327° | 2 221.675 734 m |
| 误差 | 2.203 8 m | -0.784 0 m | 1.324 3 m |
Table 6
Scenario Ⅰ location error distribution results m
| 指标 | X | Y | Z |
|---|---|---|---|
| 误差均值 | -0.827 9 | 0.760 2 | 0.132 1 |
| 误差标准差 | 3.315 5 | 1.225 8 | 1.523 2 |

Fig. 9
Position relationship diagram in scenario Ⅱ
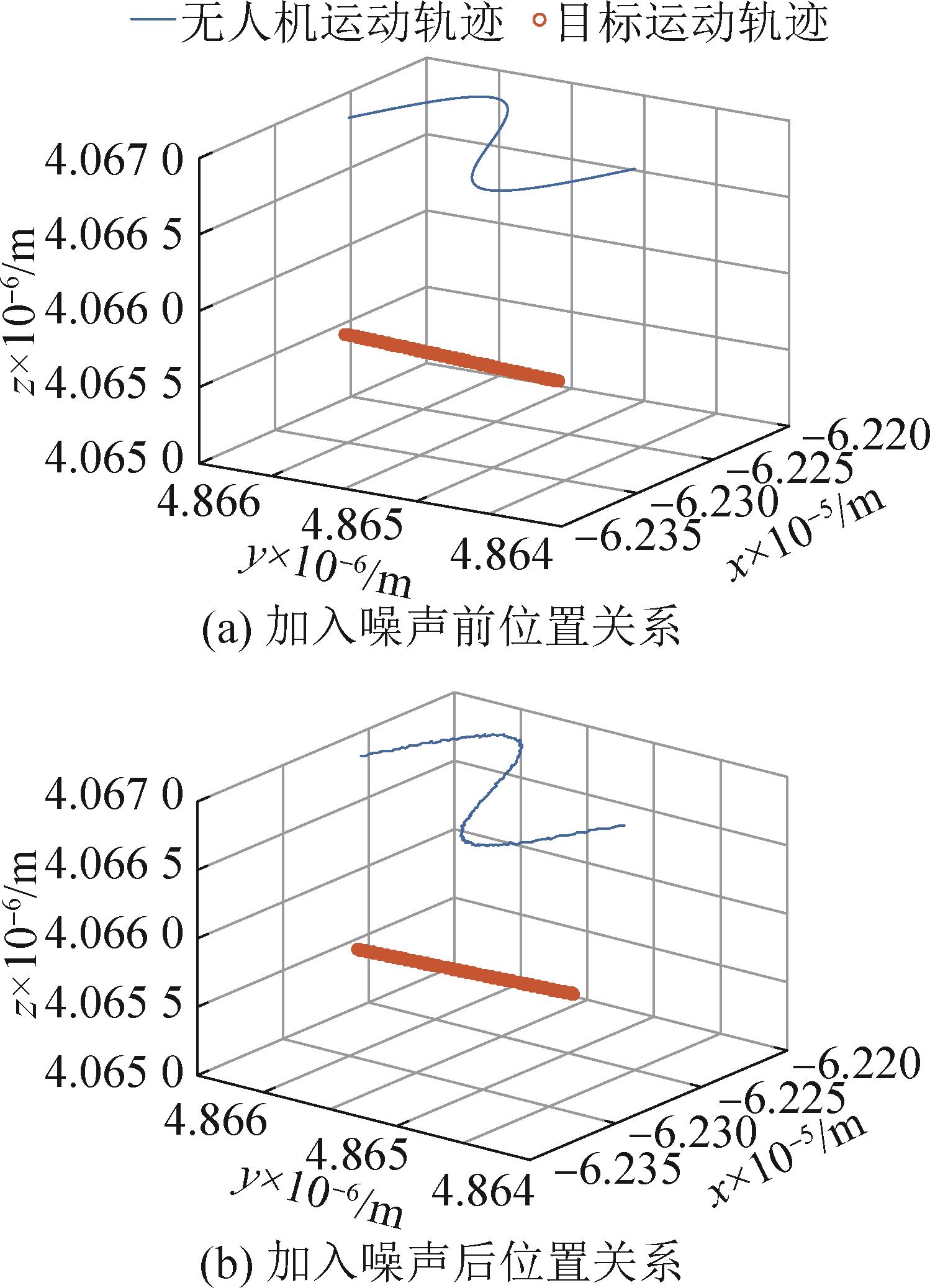
Table 7
Scenario Ⅱ speed calculation results
| 指标 | 东向 | 北向 | 天向 |
|---|---|---|---|
| 测量值 | 20.021 2 | 19.998 5 | -0.010 1 |
| 误差 | 0.021 2 | -0.001 5 | -0.010 1 |
Table 8
Scenario Ⅱ speed error distribution results m/s
| 指标 | 东向 | 北向 | 天向 |
|---|---|---|---|
| 误差均值 | 0.106 5 | -0.132 9 | 0.082 4 |
| 误差标准差 | 0.089 4 | 0.128 1 | 0.148 8 |
Table 9
Scenario Ⅱ location calculation results
| 指标 | 纬度 | 经度 | 高度 |
|---|---|---|---|
| 测量值 | 39.836 598° | 97.291 311° | 2 222.714 663 m |
| 误差/m | -0.695 6 | 0.964 4 | 0.285 3 |
Table 10
Scenario Ⅱ location error distribution results m
| 指标 | X | Y | Z |
|---|---|---|---|
| 误差均值 | 0.554 5 | -0.509 8 | 1.004 7 |
| 误差标准差 | 0.742 0 | 0.752 6 | 2.015 8 |

Fig. 10
Position relationship diagram in scenario Ⅲ
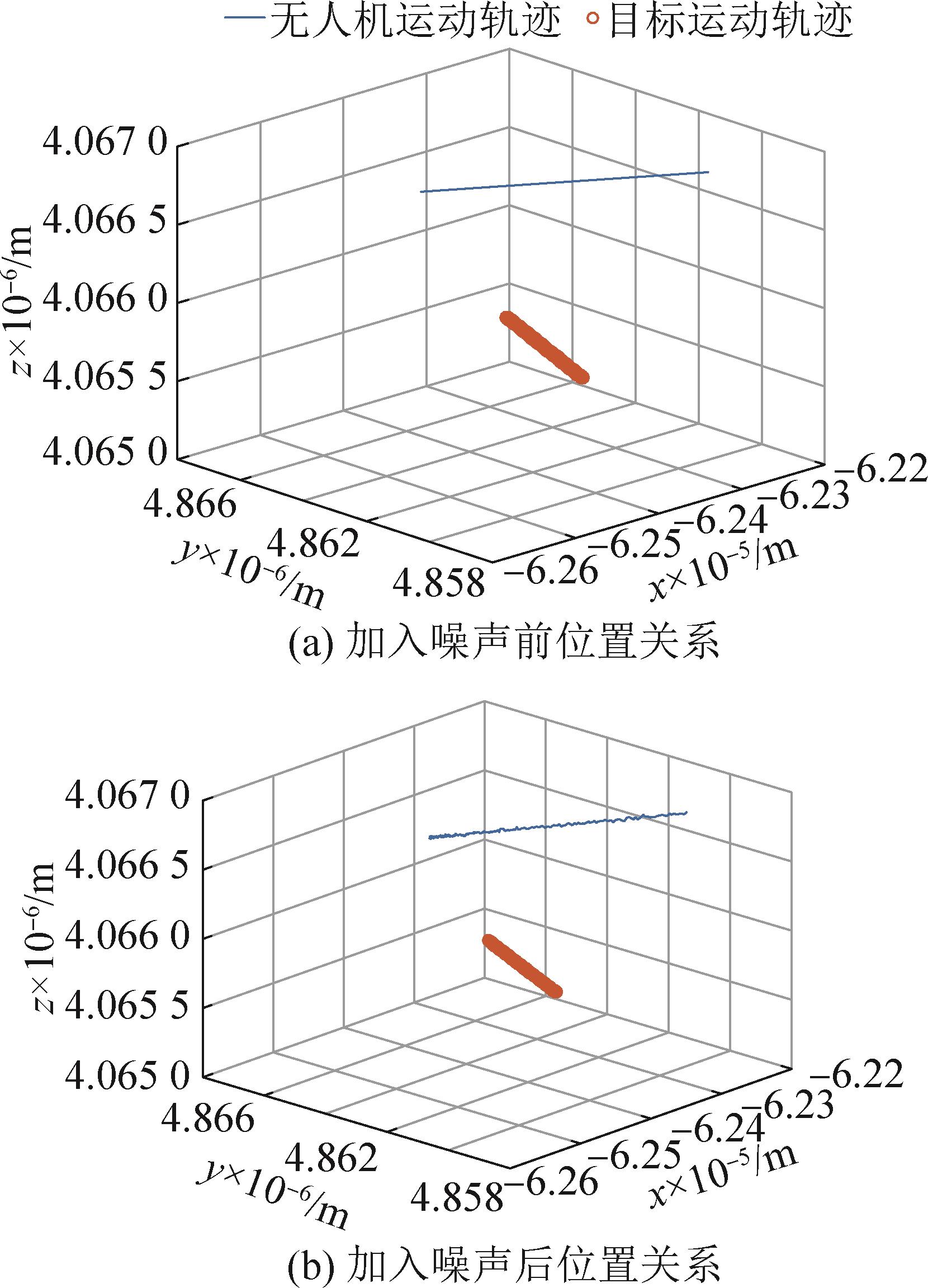
Table 11
Scenario Ⅲ speed calculation results
| 指标 | 东向 | 北向 | 天向 |
|---|---|---|---|
| 测量值 | 12.183 9 | 29.299 4 | 3.325 2 |
| 误差 | -7.816 1 | 9.299 4 | 3.325 2 |
Table 12
Scenario Ⅲ speed error distribution results m/s
| 指标 | 东向 | 北向 | 天向 |
|---|---|---|---|
| 误差均值 | -9.373 1 | 11.780 2 | 4.710 1 |
| 误差标准差 | 2.355 2 | 2.255 2 | 0.895 7 |
Table 13
Scenario Ⅲ Location Calculation Results
| 指标 | 纬度 | 经度 | 高度 |
|---|---|---|---|
| 测量值 | 39.836 597° | 97.291 303° | 2 224.515 132 m |
| 误差/m | -0.611 8 | 1.940 1 | 1.515 1 |
Table 14
Scenario Ⅲ location error distribution results m
| 指标 | X | Y | Z |
|---|---|---|---|
| 误差均值 | -0.355 3 | 1.158 2 | -0.226 2 |
| 误差标准差 | 8.374 9 | 4.389 4 | 4.014 4 |

Fig. 11
Effect of carrier aircraft x-position error
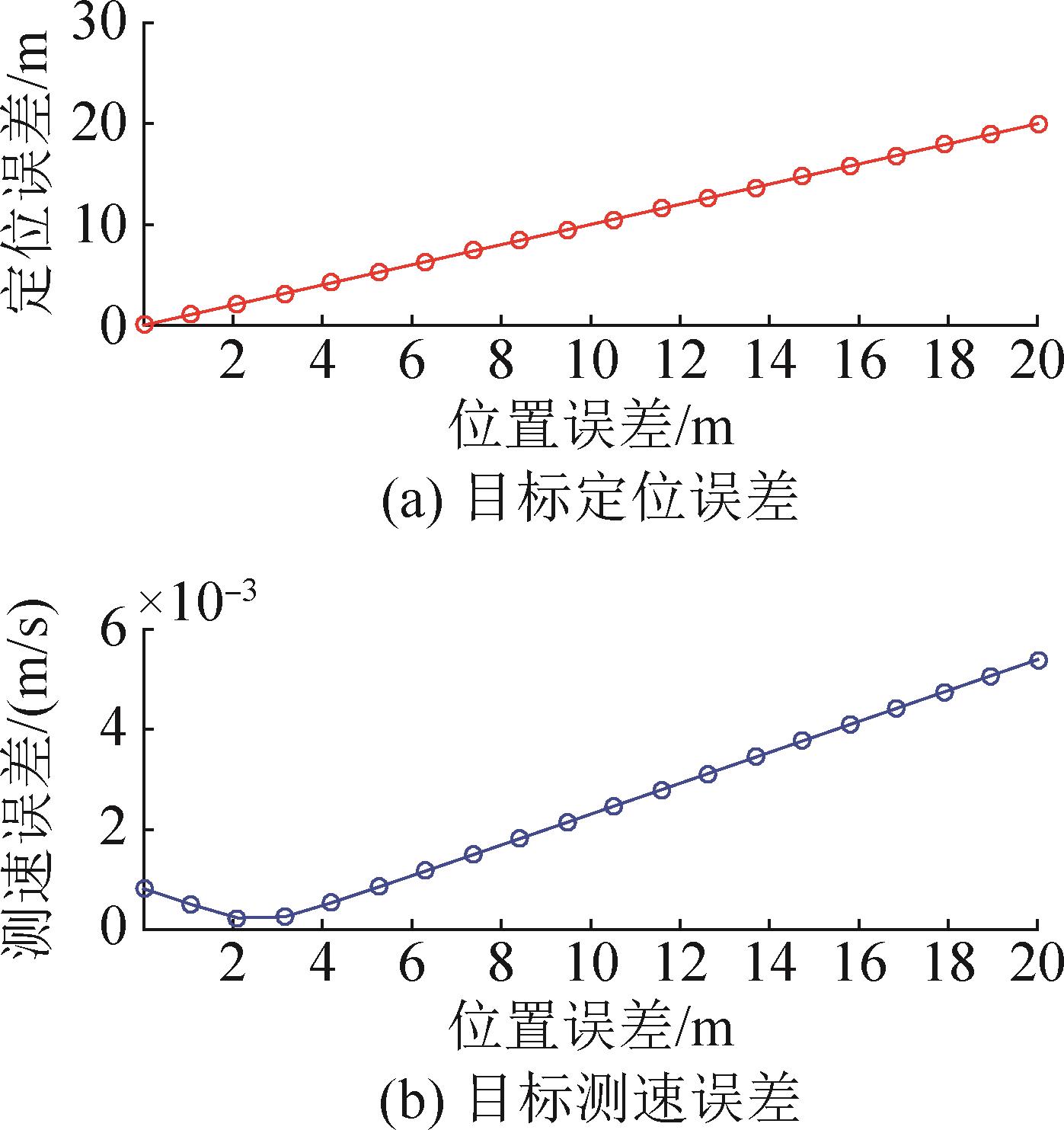

Fig. 12
Effect of carrier aircraft y-position error
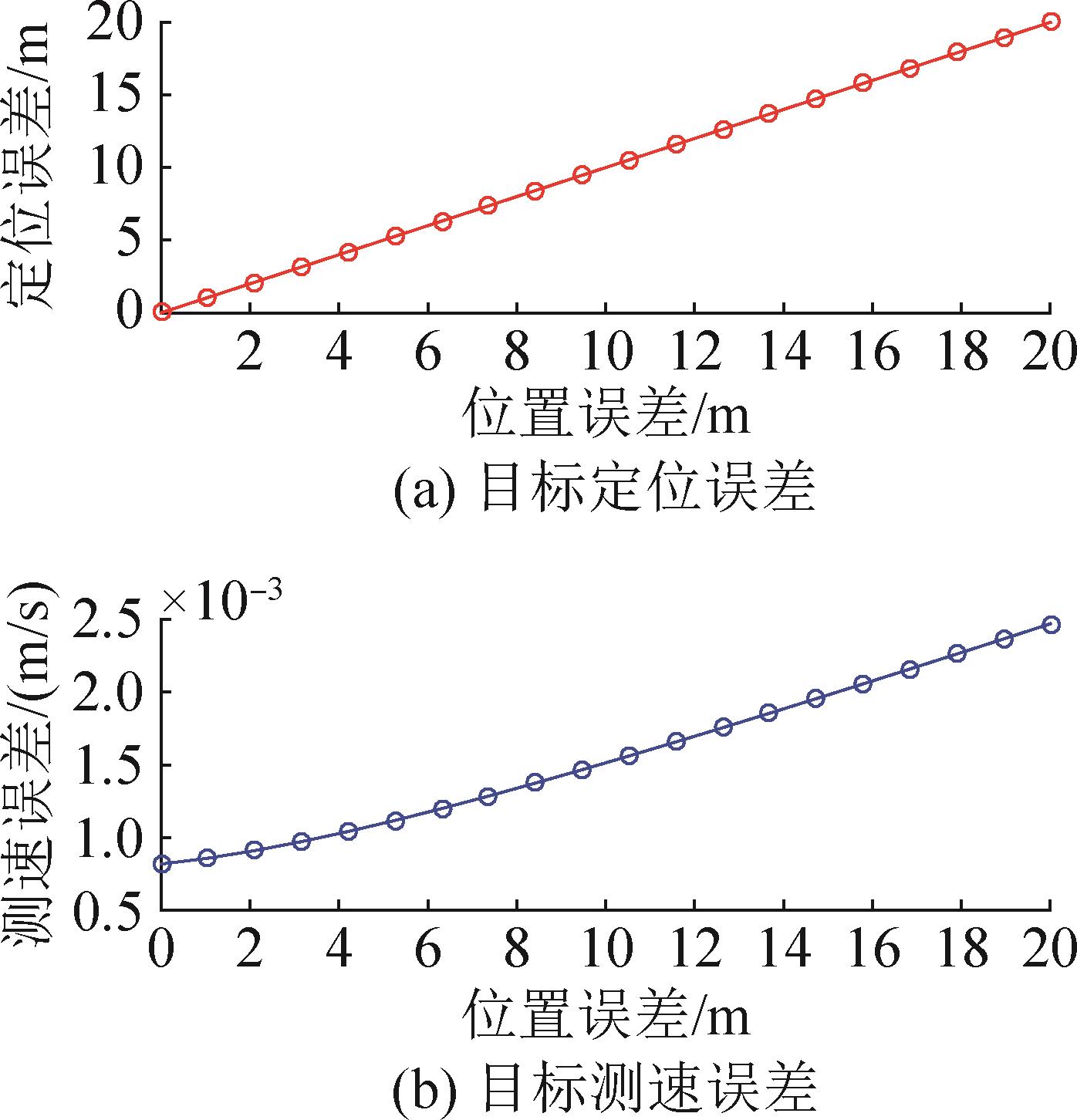

Fig. 13
Effect of carrier aircraft z-position error
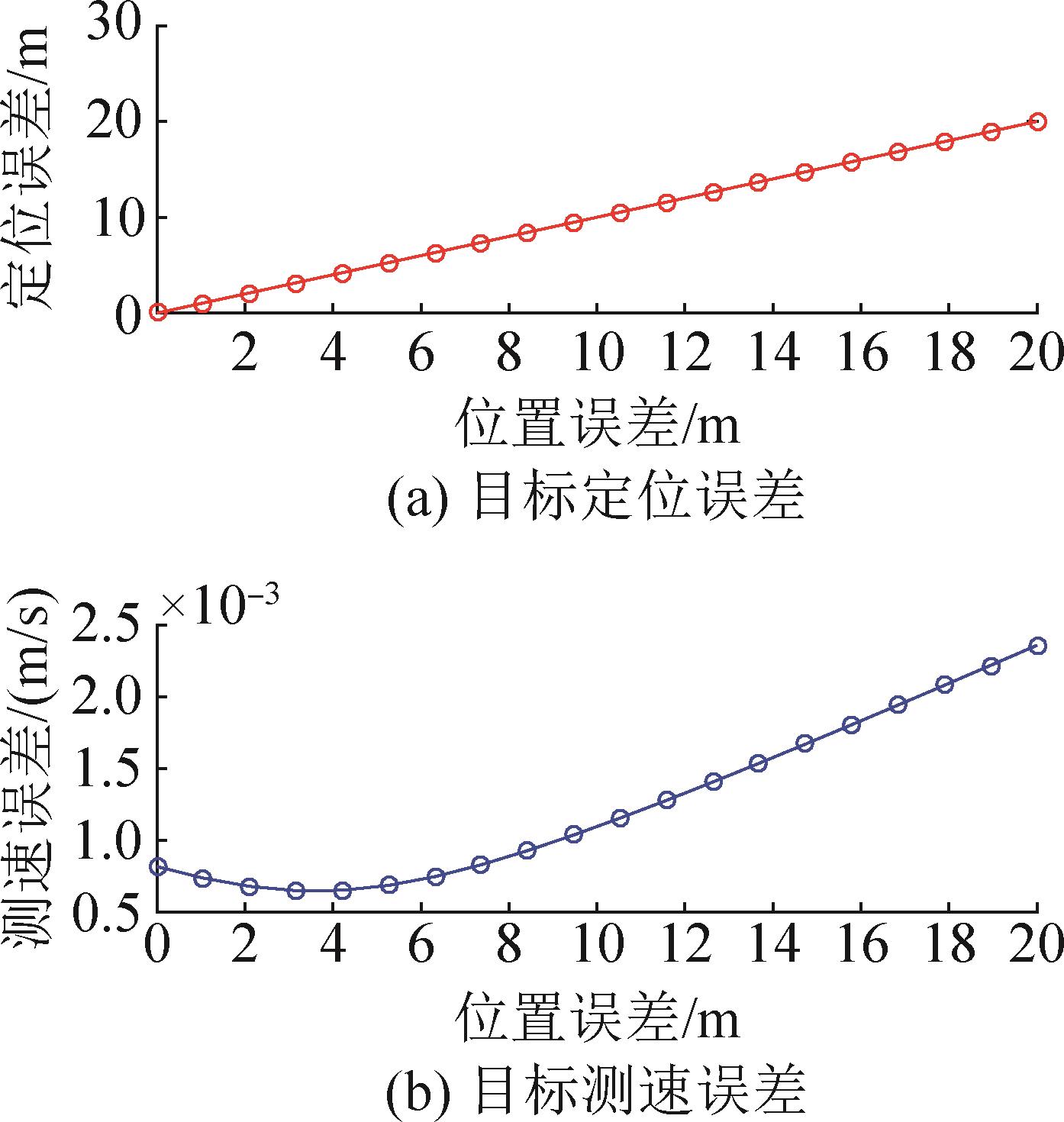

Fig. 14
Effect of attitude angle error of carrier aircraft
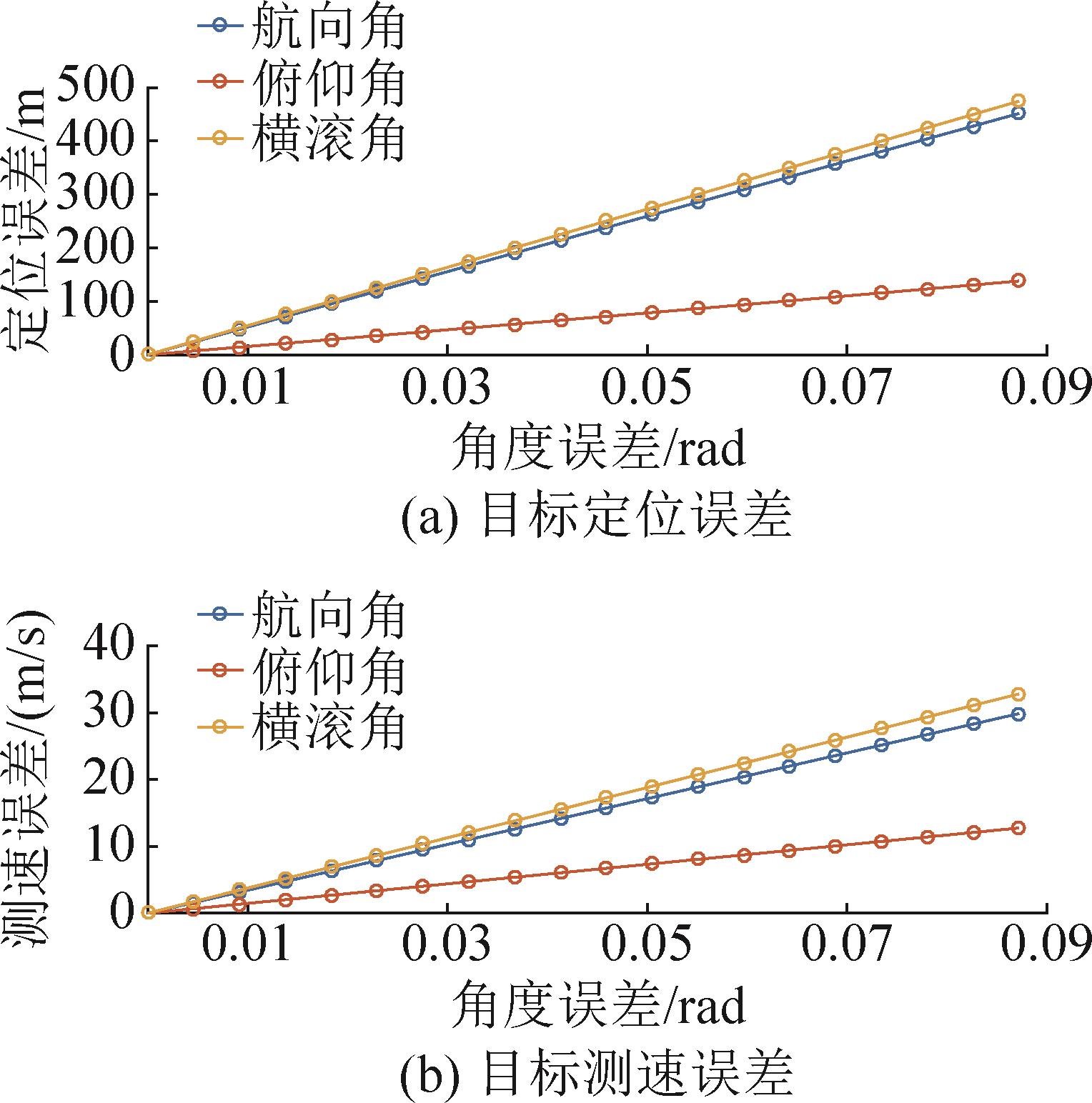
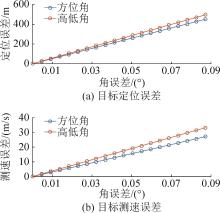
Fig. 15
Effect of camera attitude angle error
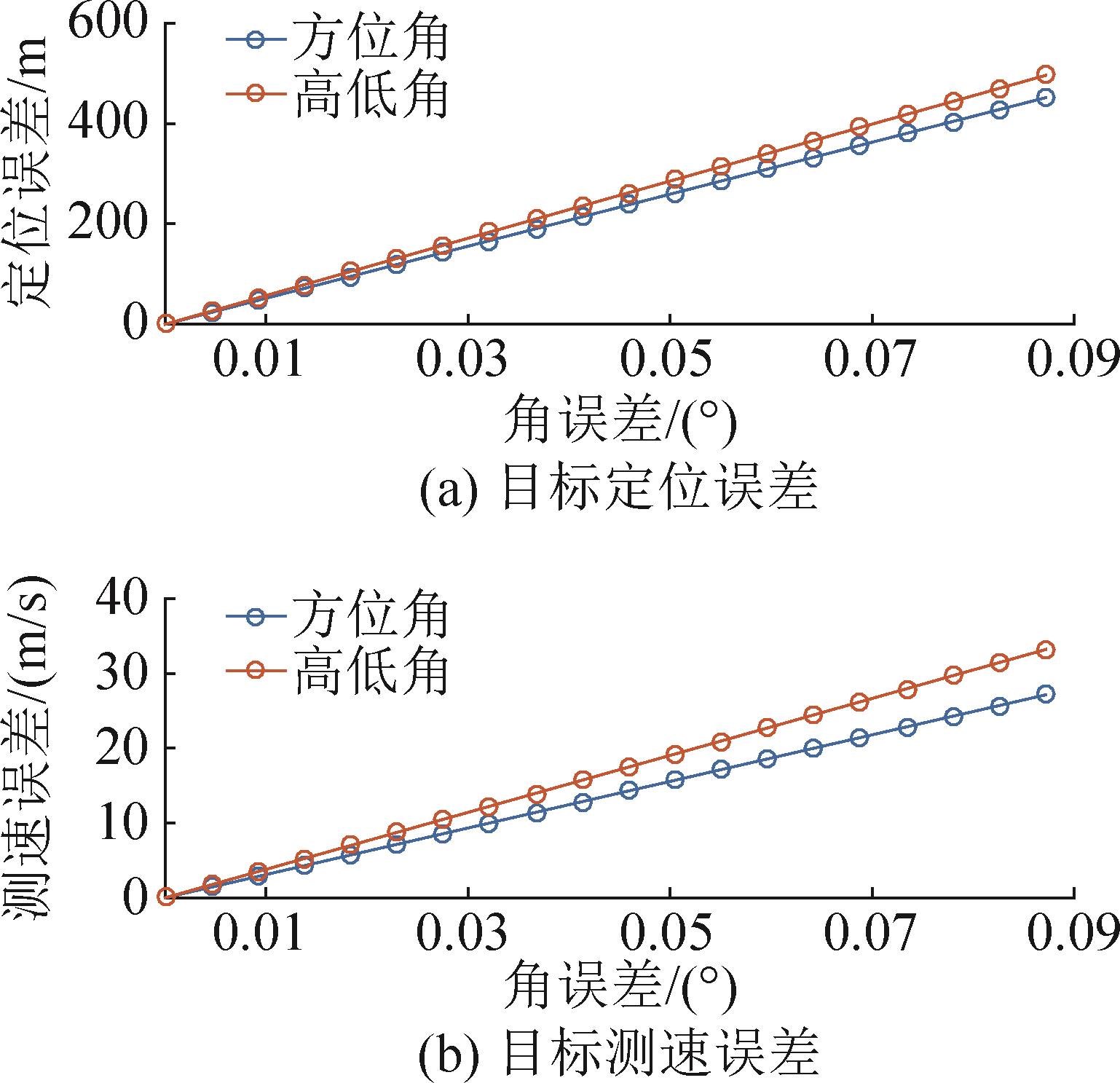
Table 15
Effect of observation duration
| 误差 | 100次观测 | 200次观测 | 300次观测 |
|---|---|---|---|
| 定位/m | 5.807 1 | 3.540 4 | 1.217 0 |
| 测速/(m/s) | 3.298 6 | 0.915 1 | 0.428 4 |
| 1 | 张笋, 朱昱, 代李菟, 等. 军用无人机技术发展历程、现状及未来应用研究[J]. 舰船电子工程, 2021, 41(6): 9-13. |
| Zhang Sun, Zhu Yu, Dai Litu, et al. Research on Development, Current Situation and Future Application of Military UAV Technology[J]. Ship Electronic Engineering, 2021, 41(6): 9-13. | |
| 2 | 刘洵, 王国华, 毛大鹏, 等. 军用飞机光电平台的研发趋势与技术剖析[J]. 中国光学与应用光学, 2009, 2(4): 269-288. |
| Liu Xun, Wang Guohua, Mao Dapeng, et al. Developing Trend and Technological Analysis of Warplane Optoelectronic Platforms[J]. Chinese Journal of Optics and Applied Optics, 2009, 2(4): 269-288. | |
| 3 | 黄中华, 冯彦辉, 刘于. 国外机载光电瞄准设备发展[J]. 电光与控制, 2021, 28(10): 61-66. |
| Huang Zhonghua, Feng Yanhui, Liu Yu. Development of Airborne Electro-optical Targeting Systems Abroad[J]. Electronics Optics & Control, 2021, 28(10): 61-66. | |
| 4 | 樊邦奎, 段连飞, 赵炳爱, 等. 无人机侦察目标定位技术[M]. 北京: 国防工业出版社, 2014. |
| Fan Bangkui, Duan Lianfei, Zhao Bingai, et al. UAV Reconnaissance Target Location Technology[M]. Beijing: National Defense Industry Press, 2014. | |
| 5 | 陈丹琪, 金国栋, 谭立宁, 等. 无人机载光电平台目标定位方法综述[J]. 飞航导弹, 2019(8): 43-48. |
| 6 | Zhang Bojian, Liu Guanghai, Li Zuoyong, et al. Locating Target Regions for Image Retrieval in an Unsupervised Manner[J/OL]. IEEE Transactions on Neural Networks and Learning Systems. (2024-03-18) [2024-05-15]. . |
| 7 | 曾庆化, 潘鹏举, 刘建业, 等. 惯性信息辅助的大视角目标快速精确定位[J]. 航空学报, 2017, 38(8): 188-200. |
| Zeng Qinghua, Pan Pengju, Liu Jianye, et al. Fast and Accurate Target Positioning with Large Viewpoint Based on Inertial Navigation System Information[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(8): 188-200. | |
| 8 | 刘显鹤, 鲁建辉, 白雪健. 基于交叉定位法对无人机飞行的纯方位无源定位问题的研究[J]. 应用数学进展, 2023, 12(7): 3365-3377. |
| Liu Xianhe, Lu Jianhui, Bai Xuejian. Research on the Bearings-only Passive Location Problem of UAV Flight Based on Cross-location Method[J]. Advances in Applied Mathematics, 2023, 12(7): 3365-3377. | |
| 9 | 唐旗英, 周雨蕙, 项天池. 无人机多目标纯方位无源几何定位[J]. 建模与仿真, 2023, 12(2): 740-750. |
| Tang Qiying, Zhou Yuhui, Xiang Tianchi. Unmanned Aerial Vehicle Multi-target Purely Azimuth Passive Geometric Positioning[J]. Modeling and Simulation, 2023, 12(2): 740-750. | |
| 10 | 余家祥, 萧德云, 秦东兴, 等. 一种新的对地定位方法及其精度分析与仿真[J]. 系统仿真学报, 2007, 19(21): 4874-4876, 4880. |
| Yu Jiaxiang, Xiao Deyun, Qin Dongxing, et al. New Approach for Ground Target Location with Precision Analysis and Simulation[J]. Journal of System Simulation, 2007, 19(21): 4874-4876, 4880. | |
| 11 | 檀立刚, 骆明伟, 李捷, 等. 无人机光电设备对地目标单站无源定位方法[J]. 应用光学, 2022, 43(4): 599-610. |
| Tan Ligang, Luo Mingwei, Li Jie, et al. Method of Single-station Passive Location to Ground Target by UAV Photoelectric Equipment[J]. Journal of Applied Optics, 2022, 43(4): 599-610. | |
| 12 | 郑锴, 郑献民, 殷少锋, 等. 基于总体最小二乘的无人机实时目标定位方法[J]. 电光与控制, 2019, 26(10): 26-29. |
| Zheng Kai, Zheng Xianmin, Yin Shaofeng, et al. A Real-time Target Localization Approach for UAVs Based on Total Least Squares Method[J]. Electronics Optics & Control, 2019, 26(10): 26-29. | |
| 13 | 牛新亮, 赵国庆, 刘原华, 等. 基于多普勒变化率的机载无源定位研究[J]. 系统仿真学报, 2009, 21(11): 3370-3373. |
| Niu Xinliang, Zhao Guoqing, Liu Yuanhua, et al. Research on Airborne Passive Location Using Doppler Changing Rate[J]. Journal of System Simulation, 2009, 21(11): 3370-3373. | |
| 14 | 李大治, 程翥, 皇甫堪. 基于Jerk模型的单站无源定位跟踪算法研究[J]. 系统仿真学报, 2008, 20(24): 6750-6753. |
| Li Dazhi, Cheng Zhu, Huangfu Kan. New Technique in Single Observer Passive Tracking Based on Jerk Model[J]. Journal of System Simulation, 2008, 20(24): 6750-6753. | |
| 15 | Du Minglei, Zou Haodong, Wang Tinghui, et al. A Cooperative Target Localization Method Based on UAV Aerial Images[J]. Aerospace, 2023, 10(11): 943. |
| 16 | 申晓天, 郑明洁. 一种新的基于FrFT的动目标测速和定位方法[J]. 中国科学院大学学报, 2023, 40(1): 84-92. |
| Shen Xiaotian, Zheng Mingjie. A New Method of Moving Target Velocity Measurement and Location Based on FrFT[J]. Journal of University of Chinese Academy of Sciences, 2023, 40(1): 84-92. | |
| 17 | 田珂, 常华俊. 基于Apriori关联规则算法提高雷达测速精度研究[J]. 火炮发射与控制学报, 2022, 43(4): 38-43. |
| Tian Ke, Chang Huajun. Research on Improving Velocity Measurement Accuracy of Radar Based on Apriori Association Rule Algorithm[J]. Journal of Gun Launch & Control, 2022, 43(4): 38-43. | |
| 18 | 张劭斌, 张志华. 基于近景摄影测量的单镜头视频车辆速度检测方法[J]. 测绘通报, 2024(3): 19-24. |
| Zhang Shaobin, Zhang Zhihua. Vehicle Speed Detection Method in Single-camera Videos in Close-range Photogrammetry[J]. Bulletin of Surveying and Mapping, 2024(3): 19-24. | |
| 19 | 庞豪杰. 单目路侧视觉的车辆测速定位与交通状态计算方法[D]. 北京: 北京交通大学, 2023. |
| Pang Haojie. Vehicle Speed Measurement and Traffic State Calculation Method Based on Monocular Roadside Vision[D]. Beijing: Beijing Jiaotong University, 2023. | |
| 20 | 张天慈, 丁萌, 钱小燕, 等. 面向低视角场面监视的移动目标速度测量[J]. 北京航空航天大学学报, 2020, 46(2): 266-273. |
| Zhang Tianci, Ding Meng, Qian Xiaoyan, et al. Moving Object Speed Measurement for Low-camera-angle Surface Surveillance[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(2): 266-273. | |
| 21 | Sayyed Majid Esmailifar, Saghafi Fariborz. Moving Target Localization by Cooperation of Multiple Flying Vehicles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(1): 739-746. |
| 22 | 杨帅, 程红, 李婷, 等. 无人机图像侦察目标定位方法及精度分析[J]. 红外技术, 2016, 38(10): 825-831. |
| Yang Shuai, Cheng Hong, Li Ting, et al. UAV Reconnaissance Images Targeting Method and Accuracy Analysis[J]. Infrared Technology, 2016, 38(10): 825-831. | |
| 23 | Wang Chenxin, Fu Wenxing, Zhang Tong, et al. A Moving Target Online Location Algorithm Based on Factor Graph[J]. International Journal of Aerospace Engineering, 2023, 2023(1): 8100925. |
| 24 | 金兆飞, 雷仲魁, 李倩. 基于运动目标跟踪与定位的无人机测速技术[J]. 光电工程, 2015, 42(2): 59-65. |
| Jin Zhaofei, Lei Zhongkui, Li Qian. UAV Measuring Object Velocity Based on Moving Target Tracking and Orientation[J]. Opto-Electronic Engineering, 2015, 42(2): 59-65. | |
| 25 | 魏家琦. 基于改进光流法的自主测速与定位技术[D]. 太原: 中北大学, 2022. |
| Wei Jiaqi. Autonomous Velocity Measurement and Positioning Technology Based on Improved Optical Flow Algorithm[D]. Taiyuan: North University of China, 2022. |
| [1] | Sun Bingli, Song Xiao, Gong Guanghong. Supplier Selection Based on Supplier Portrait and Markov Monte Carlo Method [J]. Journal of System Simulation, 2021, 33(11): 2720-2732. |
| [2] | Liu Haozhe, Li Wei, Ma Ping, Yang Ming. System Performance Evaluation Method Based on Multi-source Prior Data [J]. Journal of System Simulation, 2021, 33(11): 2673-2680. |
| [3] | Li Juan, Zhang Kunyu, Li Haibo, Yang Lijuan, Wang Mengdi. Analysis on the Mission Reliability for AUV Based on Monte Carlo Method [J]. Journal of System Simulation, 2019, 31(10): 2131-2137. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
