| 1 |
Xi Liu, Gong Li, Gong Yongxi, et al. Revealing Travel Patterns and City Structure with Taxi Trip Data[J]. Journal of Transport Geography(S0966-6923), 2015, 43(C): 78-90.
|
| 2 |
Yang Zhou, Fang Zhixiang, Jean-Claude Thill, et al. Functionally Critical Locations in an Urban Transportation Network: Identification and Space-Time Analysis Using Taxi Trajectories[J]. Computers, Environment and Urban Systems(S0198-9715), 2015, 52: 34-47.
|
| 3 |
朱递, 刘瑜. 一种路网拓扑约束下的增量型地图匹配算法[J]. 武汉大学学报(信息科学版), 2017, 42(1): 77-83.
|
|
Zhu Di, Liu Yu. An Incremental Map-Matching Method Based on Road Network Topology[J]. Geomatics and Information Science of Wuhan University, 2017, 42(1): 77-83.
|
| 4 |
吴涛, 向隆刚, 龚健雅. 路网更新的轨迹-地图匹配方法[J]. 测绘学报, 2017, 46(4): 507-515.
|
|
Wu Tao, Xiang Longgang, Gong Jianya. Renewal of Roads Networks Using Map-matching Technique of Trajectories[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(4): 507-515.
|
| 5 |
Cao Wen, Zhao Jing, Meng Weican, et al. Map Matching Algorithm According to Pseudo-Zernike Moments[C]//Second World Congress on Software Engineering. Wuhan: IEEE, 2010: 21-24.
|
| 6 |
Zheng Yu. Trajectory Data Mining: An Overview[J]. ACM Transactions on Intelligent Systems and Technology(S2157-6904), 2015, 6(3): 29.
|
| 7 |
卢家品, 罗月童, 黄兆嵩, 等. 基于排名学习和多源信息的地图匹配方法[J]. 浙江大学学报(理学版), 2020, 47(1): 27-35.
|
|
Lu Jiapin, Luo Yuetong, Huang Zhaosong, et al. An Information Fusion Map Matching Method Based on ranking Learning[J]. Journal of Zhejiang University(Science Edition), 2020, 47(1): 27-35.
|
| 8 |
Ren Ming, Karimi Hassan A. A Fuzzy Logic Map Matching for Wheelchair Navigation[J]. GPS Solutions(S1521-1886), 2012, 16(3): 273-282.
|
| 9 |
Hu G, Shao J, Liu F, et al. IF-Matching: Towards Accurate Map-Matching with Information Fusion[J]. IEEE Transactions on Knowledge and Data Engineering(S2375-026X), 2017, 29(1): 114-127.
|
| 10 |
Bang Yoonsik, Kim Jiyoung, Yu Kiyun. An Improved Map-Matching Technique Based on the Fréchet Distance Approach for Pedestrian Navigation Services[J]. Sensors(S1424-8220), 2016, 16(10): 1768.
|
| 11 |
Ling Yuan, Li Dan, Hu Song. A Map-Matching Algorithm with Low-Frequency Floating Car Data Based on Matching Path[J]. EURASIP Journal on Wireless Communications and Networking(S1687-1499), 2018, 2018(1): 146.
|
| 12 |
Newson Paul, John Krumm. Hidden Markov Map Matching Through Noise and Sparseness[C]//17th ACM SIGSPATIAL International Symposium on Advances in Geographic Information Systems, ACM-GIS Seattle, Washington: Association for Computing Machinery, 2009: 336-343.
|
| 13 |
陈浩, 许长辉, 张晓平, 等. 基于隐马尔科夫模型和动态规划的手机数据移动轨迹匹配[J]. 地理与地理信息科学, 2019, 35(3): 1-8.
|
|
Chen Hao, Xu Changhui, Zhang Xiaoping, et al. Hidden Markov Model and Dynamic Programming Based Map Matching Method for Mobile Trajectories Using Mobile Phone Data[J]. Geography and Geo-Information Science, 2019, 35(3): 1-8.
|
| 14 |
刘旻, 李梅, 徐晓宇, 等. 一种基于HMM模型改进的地图匹配算法[J]. 北京大学学报(自然科学版), 2018, 54(6): 1235-1241.
|
|
Liu Min, Li Mei, Xu Xiaoyu, et al. An Improved Map Matching Algorithm Based on HMM Model[J]. Acta Scientiarum Naturalium Universitatis Pekinensis, 2018, 54(6): 1235-1241.
|
| 15 |
王晓蒙, 池天河, 林晖, 等. 一种面向海量浮动车数据的地图匹配方法[J]. 地球信息科学学报, 2015, 17(10): 1143-1151.
|
|
Wang Xiaomeng, Chi Tianhe, Lin Hui, et al. A Research of Map-Matching Method for Massive Floating Car Data[J]. Journal of Geo-Information Science, 2015, 17(10): 1143-1151.
|
| 16 |
Zhou Xibo, Ye Ding, Tan Haoyu, et al. HIMM: An HMM-Based Interactive Map-Matching System[C]//22nd International Conference on Database Systems for Advanced Applications. Cham: Springer International Publishing, 2017: 3-18.
|
| 17 |
吴刚, 邱煜晶, 王国仁. 基于隐马尔可夫模型和遗传算法的地图匹配算法[J]. 东北大学学报(自然科学版), 2017, 38(4): 472-475.
|
|
Wu Gang, Qiu Yujing, Wang Guoren. Map Matching Algorithm Based On Hidden Markov Model and Genetic Algorithm[J]. Journal of Northeastern University(Natural Science), 2017, 38(4): 472-475.
|
| 18 |
Huang Y, Rao W, Zhang Z, et al. Frequent Pattern-Based Map-Matching on Low Sampling Rate Trajectories[C]//2018 19th IEEE International Conference on Mobile Data Management.Aalborg, Denmark: IEEE 2018: 266-273.
|
| 19 |
Yan Xie, Zhou Kai, Miao Fang, et al. High-Accuracy Off-Line Map-Matching of Trajectory Network Division Based on Weight Adaptation HMM[J]. IEEE Access(S2169-3536), 2020, 8: 7256-7266.
|
| 20 |
吴军. 数学之美[M]. 北京: 人民邮电出版社, 2012: 49-58.
|
| 21 |
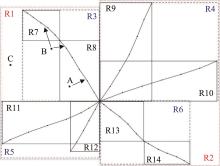
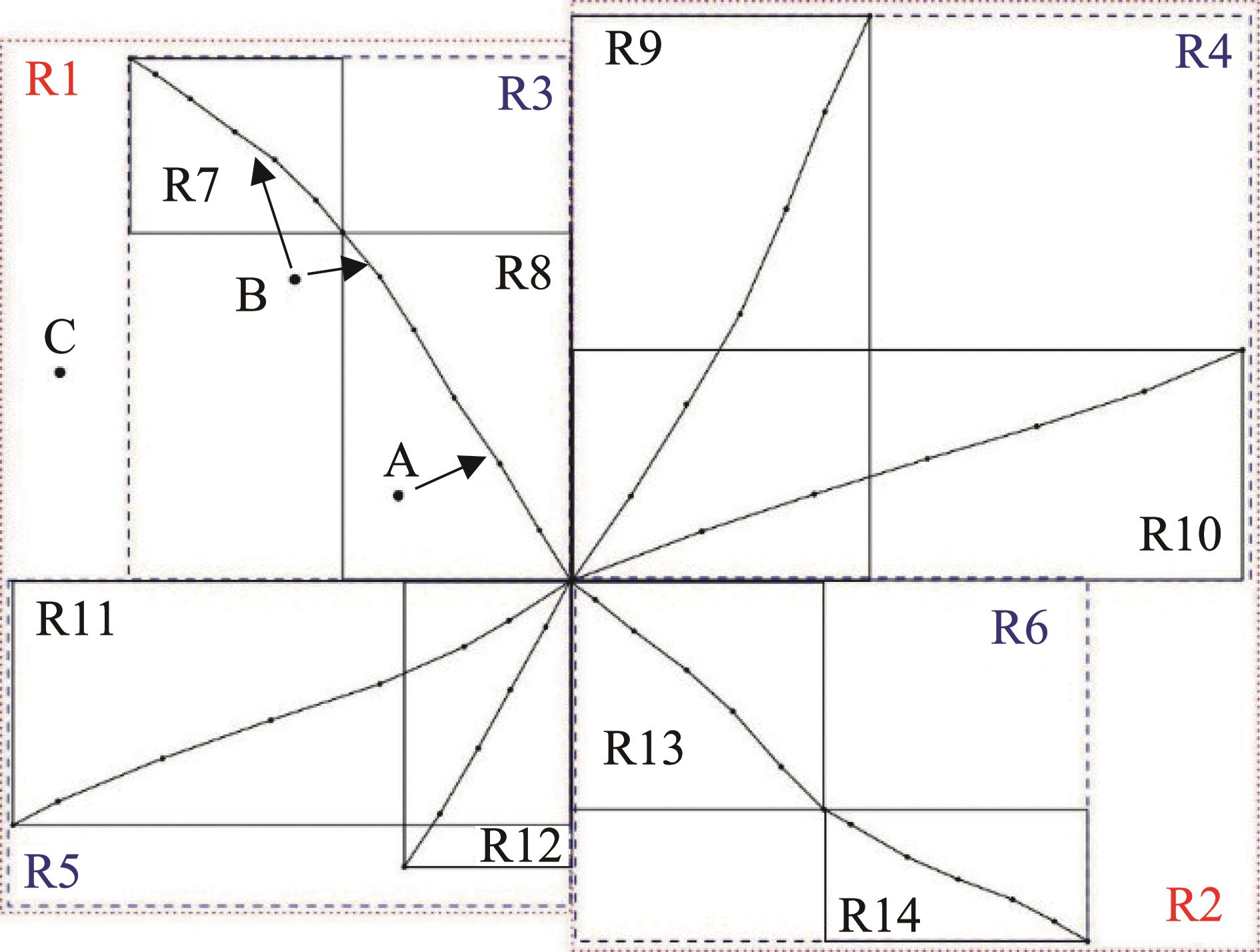
Guttman Antonin. R-Trees: A Dynamic Index Structure for Spatial Searching[J]. SIGMOD record(S0163-5808), 1984, 14(2): 47-57.
|
 ), Jiayue Zhou1, Longhao Wang1, Jing Wu1, Rui Li1, Xiaoping Rui2(
), Jiayue Zhou1, Longhao Wang1, Jing Wu1, Rui Li1, Xiaoping Rui2(