

系统仿真学报 ›› 2026, Vol. 38 ›› Issue (5): 1290-1302.doi: 10.16182/j.issn1004731x.joss.25-0502
石敏1, 郭诗盛1, 王素琴1, 李兆歆2,3, 朱登明4,5
收稿日期:2025-06-03
修回日期:2025-08-11
出版日期:2026-05-21
发布日期:2026-05-29
通讯作者:
王素琴
第一作者简介:石敏(1975-),女,副教授,博士,研究方向为具身智能、三维场景感知与重建。
基金资助:Shi Min1, Guo Shisheng1, Wang Suqin1, Li Zhaoxin2,3, Zhu Dengming4,5
Received:2025-06-03
Revised:2025-08-11
Online:2026-05-21
Published:2026-05-29
Contact:
Wang Suqin
摘要:
为提升复杂堆叠场景中抓取姿态估计的稳定性与跨类别泛化能力,提出一种融合物理规则与几何结构先验的无标注6-DoF抓取检测方法。在离线阶段,基于多物理约束,构建可行抓取姿态模板库,无需依赖人工抓取标注。在网络设计中,引入物体结构对称性与空间重叠关系建模,设计具备遮挡感知与暴露度建模能力的几何引导机制,并结合关键点回归实现目标物体的稳健姿态对齐。构建多类型堆叠数据集IPA-Stack++,并在单类与混合类工业零部件抓取任务中进行测试。实验结果表明:所提方法在单类型和多类型场景中的抓取成功率明显优于现有其他同类方法,展现出良好的抓取稳定性与通用性。
中图分类号:
石敏,郭诗盛,王素琴等 . 融合物理与几何先验的无抓取标注6-DoF抓取检测方法[J]. 系统仿真学报, 2026, 38(5): 1290-1302.
Shi Min,Guo Shisheng,Wang Suqin,et al . Annotation-free 6-DoF Grasp Detection Method Integrating Physical and Geometric Priors[J]. Journal of System Simulation, 2026, 38(5): 1290-1302.

图1
AGP-Grasp方法结构
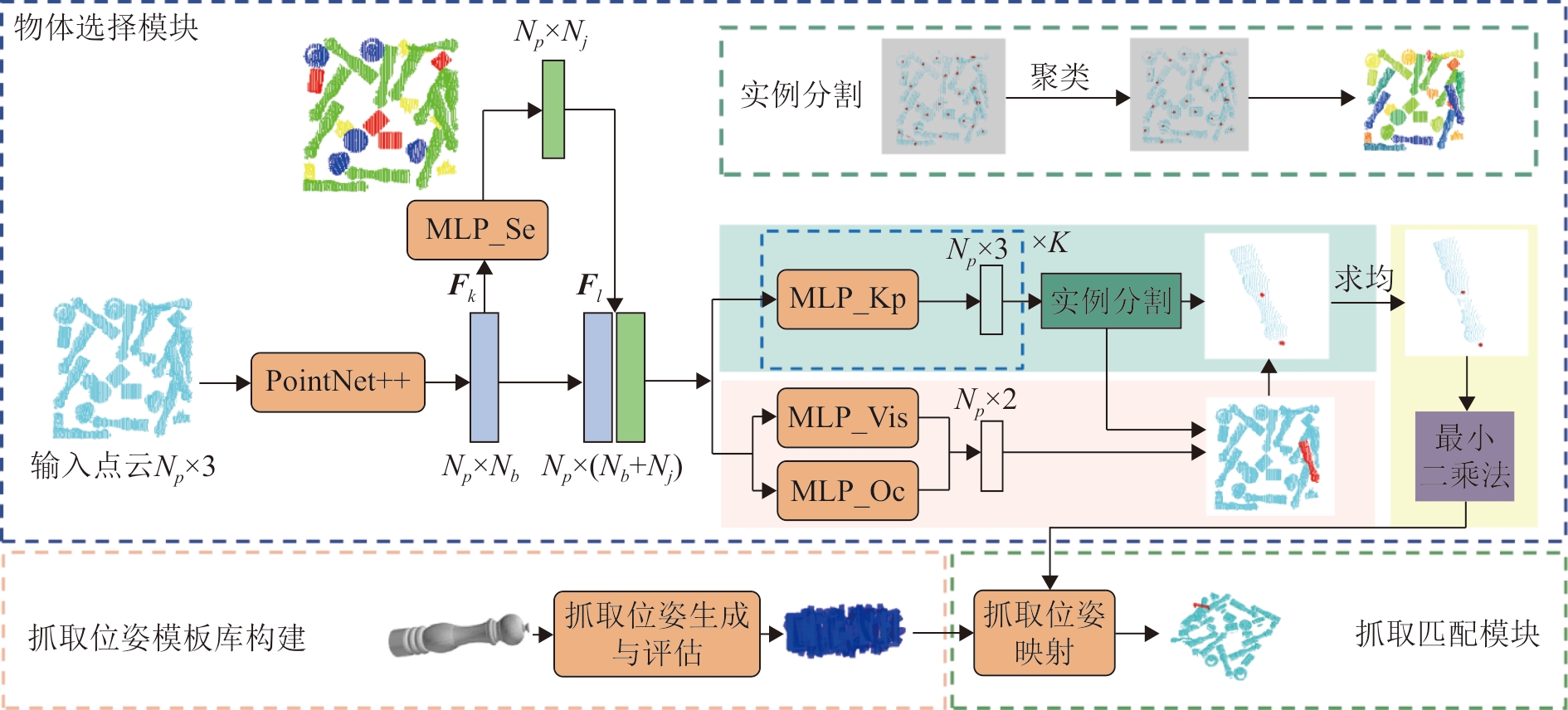

图2
力封闭效果图
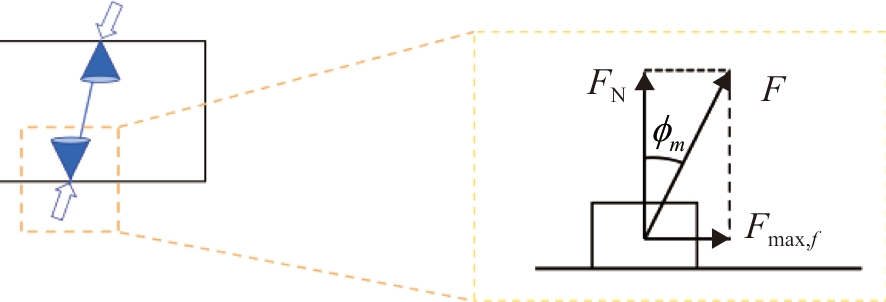
图3
夹爪模型图
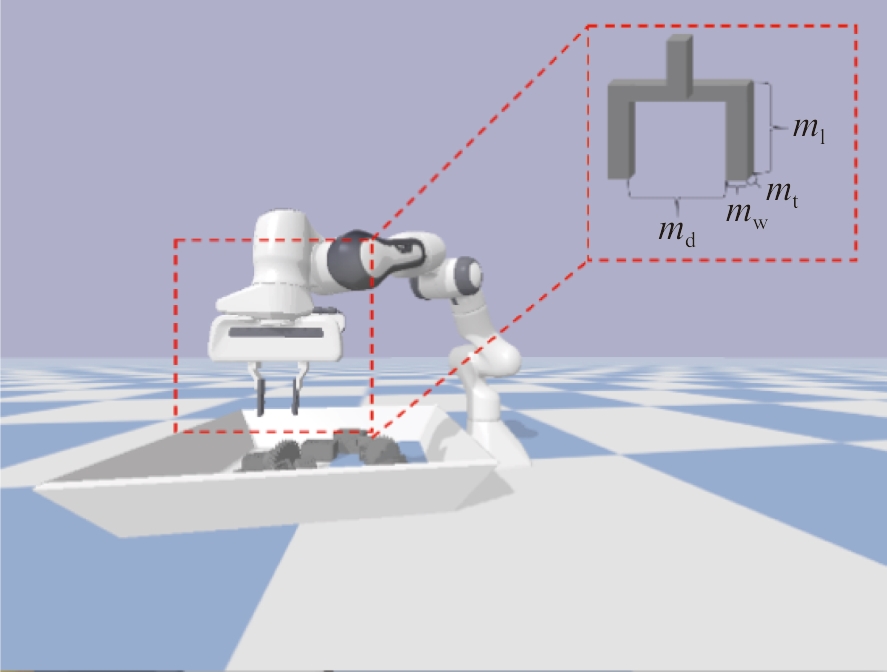

图4
抓取模板库构建流程图
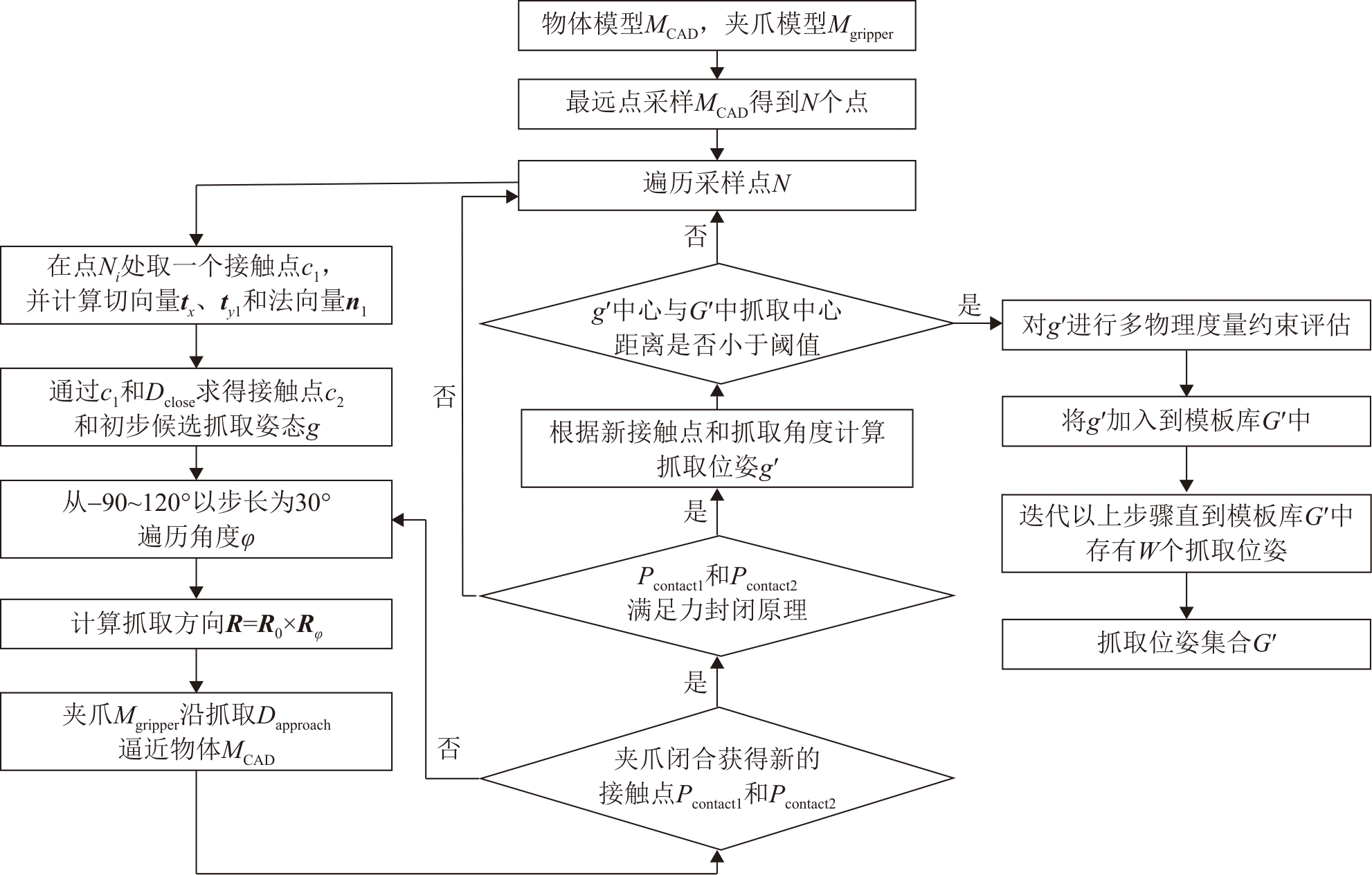
图5
堆叠物体示意图

图6
几何引导与多任务学习整体框架
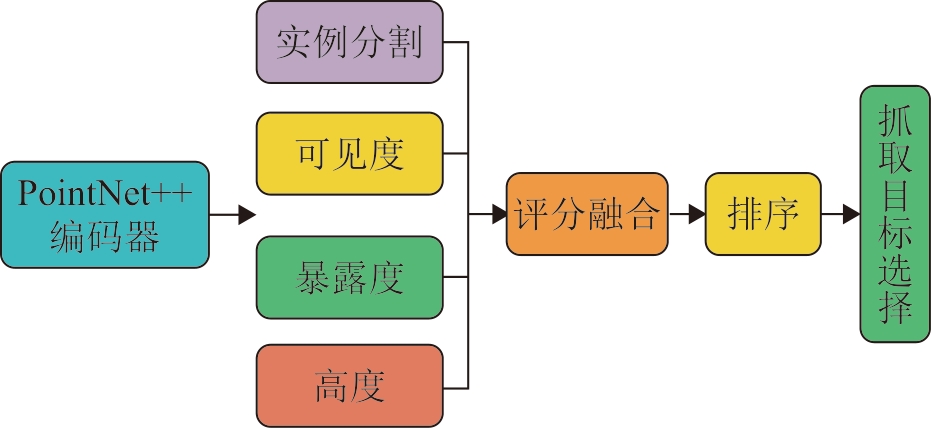

图7
数据集和实验场景示意图
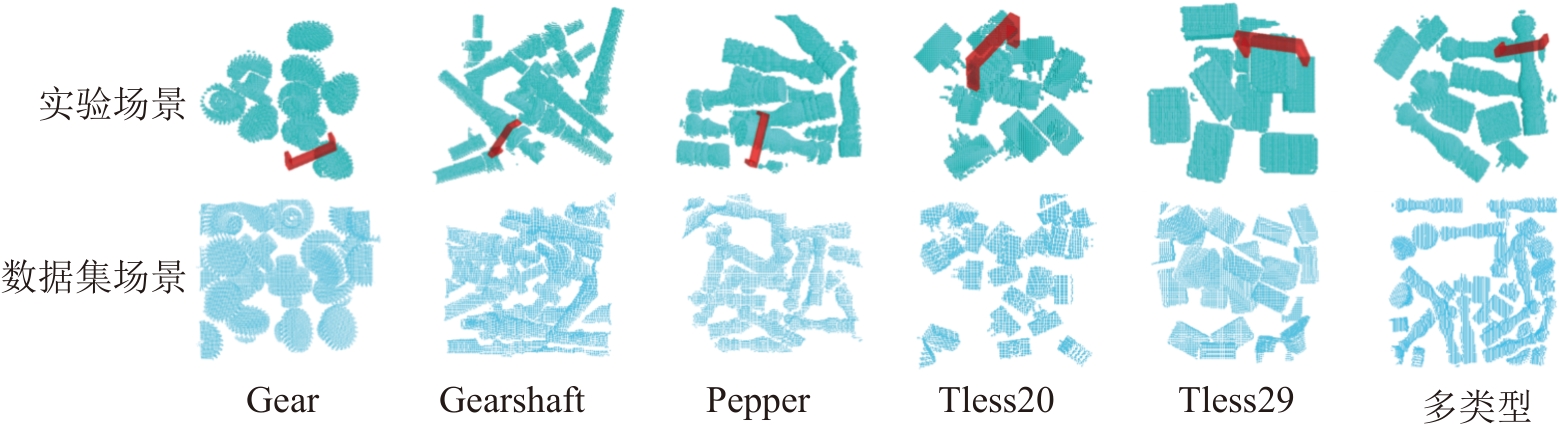

图8
实验仿真平台
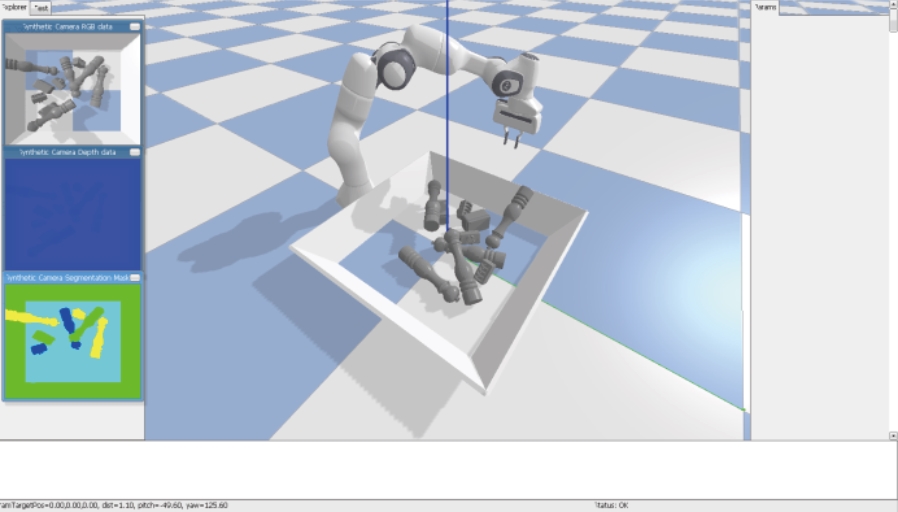
表1
在单类型场景中抓取成功率对比 (%)
| 方法 | Pepper | Tless20 | Tless29 | Gear | GearsSaft |
|---|---|---|---|---|---|
| PointNetGPD | 84 | 75 | 74 | 80 | 82 |
| NG-Net | 98 | 80 | 96 | 93 | 97 |
| No-Label[ | 99 | 91 | 94 | 98 | 98 |
| 本文算法 | 99 | 98 | 99 | 99 | 99 |
表2
在多类型场景中抓取成功率对比 (%)
| 方法 | Pepper | Tless20 | Tless29 | Gear |
|---|---|---|---|---|
| PointNetGPD | 72 | 64 | 52 | 56 |
| NG-Net | 92 | 80 | 96 | 88 |
| No-Label | 80 | 76 | 88 | 82 |
| 本文算法 | 98 | 96 | 98 | 98 |
表3
在2种场景下抓取时间对比 (s)
| 方法 | 单类型场景下 | 多类型场景下 | ||||
|---|---|---|---|---|---|---|
| Pepper | Tless20 | Tless29 | Gear | Gearshaft | ||
| PointNetGPD | 3.381 | 4.862 | 4.415 | 4.363 | 3.553 | 9.080 |
| No-Label | 1.083 | 1.407 | 1.435 | 3.655 | 1.222 | 3.516 |
| 本文算法 | 1.071 | 1.464 | 1.481 | 3.653 | 0.951 | 3.371 |
表4
在2种场景下模板匹配时间对比 (s)
| 抓取模板数量 | 单类型场景下 | 多类型场景下 | ||||
|---|---|---|---|---|---|---|
| Pepper | Tless20 | Tless29 | Gear | Gearshaft | ||
| 180 | 0.123 5 | 0.127 2 | 0.215 5 | 0.141 5 | 0.146 6 | 0.171 3 |
| 200 | 0.158 2 | 0.137 3 | 0.237 0 | 0.167 0 | 0.158 6 | 0.189 9 |
| 220 | 0.162 6 | 0.156 6 | 0.258 5 | 0.179 9 | 0.193 5 | 0.211 4 |
表5
基于关键点消融实验结果对比 (%)
| 场景 | 方法 | Pepper | Tless20 | Tless29 | Gear | Gearshaft |
|---|---|---|---|---|---|---|
| 单类型 | 基于关键点 | 99 | 98 | 99 | 99 | 99 |
| 直接回归 | 96 | 95 | 94 | 97 | 98 | |
| 多类型 | 基于关键点 | 98 | 96 | 98 | 98 | |
| 直接回归 | 94 | 94 | 92 | 96 |
表6
对比抓取得分消融实验结果对比 (%)
| 场景 | 方法 | Pepper | Tless20 | Tless29 | Gear |
|---|---|---|---|---|---|
| 单类型 | Baseline+得分 | 99 | 98 | 99 | 99 |
| Baseline | 99 | 93 | 96 | 99 | |
| 多类型 | Baseline+得分 | 98 | 96 | 98 | 98 |
| Baseline | 96 | 96 | 92 | 88 |
表7
不同模板数量下消融实验结果对比 (%)
| 抓取模板数量 | 单类型场景下 | 多类型场景下 | ||||
|---|---|---|---|---|---|---|
| Pepper | Tless20 | Tless29 | Gear | Gearshaft | ||
| 180 | 98 | 95 | 96 | 98 | 96 | 96.0 |
| 200 | 99 | 98 | 99 | 99 | 99 | 97.5 |
| 220 | 99 | 97 | 98 | 98 | 99 | 97.0 |
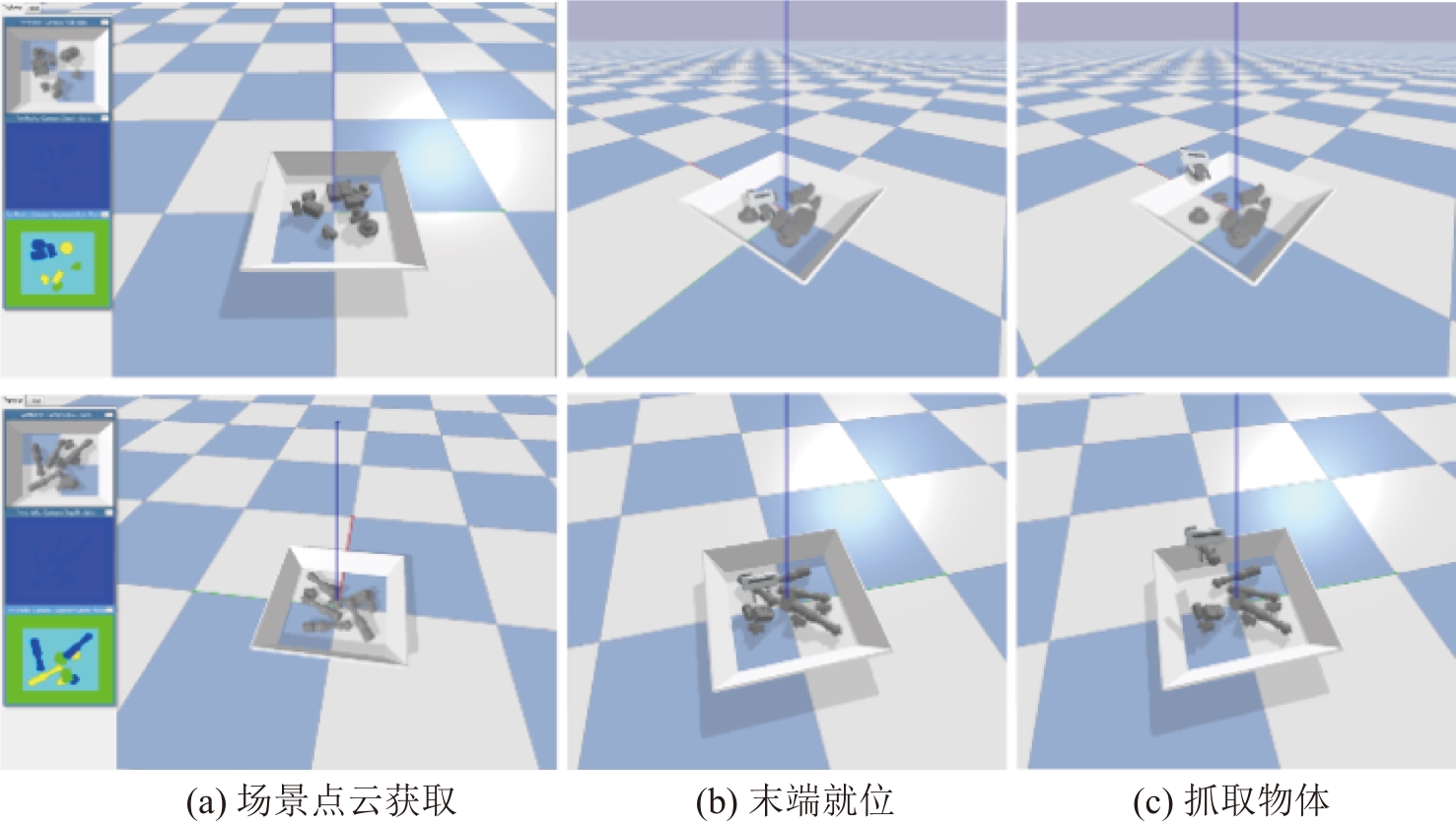
图9
仿真环境下的抓取过程
| [1] | 徐健, 刘高峰, 赵一剑, 等. 装配机器人的数字孪生虚实同步及抓取方法[J]. 系统仿真学报, 2024, 36(9): 2181-2192. |
| Xu Jian, Liu Gaofeng, Zhao Yijian, et al. The Synchronous Grasping Method of Virtual-real Assembly Robot Based on Digital Twin[J]. Journal of System Simulation, 2024, 36(9): 2181-2192. | |
| [2] | Zhang Jing, Tao Dacheng. Empowering Things with Intelligence: A Survey of the Progress, Challenges, and Opportunities in Artificial Intelligence of Things[J]. IEEE Internet of Things Journal, 2021, 8(10): 7789-7817. |
| [3] | Wang Shengfan, Jiang Xin, Zhao Jie, et al. Efficient Fully Convolution Neural Network for Generating Pixel Wise Robotic Grasps with High Resolution Images[C]//2019 IEEE International Conference on Robotics and Biomimetics (ROBIO). Piscataway: IEEE, 2019: 474-480. |
| [4] | Mahler J, Liang J, Niyaz S, et al. Dex-Net 2.0: Deep Learning to Plan Robust Grasps with Synthetic Point Clouds and Analytic Grasp Metrics[EB/OL]. (2017-08-08) [2025-03-24]. . |
| [5] | Yu Sheng, Zhai Dihua, Xia Yuanqing, et al. SE-ResUNet: A Novel Robotic Grasp Detection Method[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 5238-5245. |
| [6] | Morrison Douglas, Corke Peter, Leitner Jürgen. Closing the Loop for Robotic Grasping: A Real-time, Generative Grasp Synthesis Approach[EB/OL]. (2018-05-15) [2025-02-14]. . |
| [7] | Kaynar Furkan, Rajagopalan Sudarshan, Zhou Shaobo, et al. Remote Task-oriented Grasp Area Teaching by Non-experts Through Interactive Segmentation and Few-shot Learning[EB/OL]. (2023-03-17) [2025-03-24]. . |
| [8] | Liu Jirong, Zhang Ruo, Fang Haoshu, et al. Target-referenced Reactive Grasping for Dynamic Objects[C]//2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2023: 8824-8833. |
| [9] | Fang Haoshu, Wang Chenxi, Gou Minghao, et al. GraspNet-1Billion: A Large-scale Benchmark for General Object Grasping[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2020: 11441-11450. |
| [10] | Zhao Binglei, Zhang Hanbo, Lan Xuguang, et al. REGNet: REgion-based Grasp Network for End-to-end Grasp Detection in Point Clouds[C]//2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2021: 13474-13480. |
| [11] | Ren Guangli, Geng Wenjie, Guan Peiyu, et al. Pixel-wise Grasp Detection via Twin Deconvolution and Multi-dimensional Attention[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2023, 33(8): 4002-4010. |
| [12] | Liang Hongzhuo, Ma Xiaojian, Li Shuang, et al. PointNetGPD: Detecting Grasp Configurations from Point Sets[C]//2019 International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2019: 3629-3635. |
| [13] | Qin Yuzhe, Chen Rui, Zhu Hao, et al. S4G: Amodal Single-view Single-shot SE(3) Grasp Detection in Cluttered Scenes[C]//Proceedings of the Conference on Robot Learning. Chia Laguna Resort: PMLR, 2020: 53-65. |
| [14] | Wang Chenxi, Fang Haoshu, Gou Minghao, et al. Graspness Discovery in Clutters for Fast and Accurate Grasp Detection[C]//2021 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2021: 15944-15953. |
| [15] | 徐胜军, 崔智伟, 史亚, 等. 多尺度区域注意力堆叠物体抓取检测网络[J]. 激光与光电子学进展, 2025, 62(10): 224-235. |
| Xu Shengjun, Cui Zhiwei, Shi Ya, et al. Regional-attention Stacked-object Grasp Detection Network[J]. Laser & Optoelectronics Progress, 2025, 62(10): 224-235. | |
| [16] | Shi Min, Hou Jingzhao, Li Zhaoxin, et al. NG-net: No-grasp Annotation Grasp Detection Network for Stacked Scenes[J]. Journal of Intelligent Manufacturing, 2025, 36(2): 1477-1490. |
| [17] | 石敏, 侯京召, 朱登明, 等. 无抓取标注的堆叠物体抓取位姿检测方法[J]. 计算机辅助设计与图形学学报, 2025, 37(9): 1632-1642. |
| Shi Min, Hou Jingzhao, Zhu Dengming, et al. No-label Stacked Object Grasp Pose Detection Algorithm[J]. Journal of Computer-Aided Design & Computer Graphics, 2025, 37(9): 1632-1642. | |
| [18] | Huang Dingtao, Lin Ente, Chen Lipeng, et al. SD-net: Symmetric-aware Keypoint Prediction and Domain Adaptation for 6D Pose Estimation in Bin-picking Scenarios[C]//2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2024: 2747-2754. |
| [19] | Dong Zhikai, Liu Sicheng, Zhou Tao, et al. PPR-net: Point-wise Pose Regression Network for Instance Segmentation and 6D Pose Estimation in Bin-picking Scenarios[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2019: 1773-1780. |
| [20] | Zeng Long, Weijie Lü, Dong Zhikai, et al. PPR-Net++: Accurate 6-D Pose Estimation in Stacked Scenarios[J]. IEEE Transactions on Automation Science and Engineering, 2022, 19(4): 3139-3151. |
| [21] | Kleeberger Kilian, Landgraf Christian, Huber Marco F. Large-scale 6D Object Pose Estimation Dataset for Industrial Bin-picking[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2019: 2573-2578. |
| [22] | 楚红雨, 冷齐齐, 张晓强, 等. 融入注意力机制的多模特征机械臂抓取位姿检测[J]. 控制与决策, 2024, 39(3): 777-785. |
| Chu Hongyu, Leng Qiqi, Zhang Xiaoqiang, et al. Multi-modal Feature Robotic Arm Grasping Pose Detection with Attention Mechanism[J]. Control and Decision, 2024, 39(3): 777-785. |
| [1] | 董志明, 胡忠奇, 戴浩然, 高建成. 基于大语言模型的作战仿真想定自动化生成方法[J]. 系统仿真学报, 2026, 38(5): 1129-1145. |
| [2] | 李校男, 晁涛, 马萍, 杨明, 王玉轩. 基于期望最大化方法的非线性SSM黑箱鲁棒辨识[J]. 系统仿真学报, 2026, 38(5): 1146-1158. |
| [3] | 刘银钢, 马明, 张荣华. 基于大语言模型的兵棋推演动态任务规划[J]. 系统仿真学报, 2026, 38(5): 1187-1204. |
| [4] | 苏泓嘉, 张成, 刘飞. 基于模糊功能依赖网分析的体系效能评估方法[J]. 系统仿真学报, 2026, 38(5): 1224-1238. |
| [5] | 梅华威, 杨鹏慧, 余洋. 计及数据漂移改进PatchTST的超短期光伏功率预测[J]. 系统仿真学报, 2026, 38(5): 1239-1254. |
| [6] | 李权, 苏鹏, 万海英, 张承玺, 何志坚, 倪艺洋, 赵忠盖, 刘飞. 基于多阶段LHS-EPRCC方法的青霉素发酵过程建模[J]. 系统仿真学报, 2026, 38(5): 1255-1276. |
| [7] | 周子聪, 曾俊杰, 胡越, 朱正秋, 尹全军. 基于次优示例引导的兵棋推演多智能体强化学习方法[J]. 系统仿真学报, 2026, 38(5): 1277-1289. |
| [8] | 姜彦吉, 肖星佚, 董浩, 于淼, 黄金山, 刘大千, 费博雯. 融合点线特征的图关系优化3D车道线检测方法[J]. 系统仿真学报, 2026, 38(5): 1303-1319. |
| [9] | 张鑫, 张平, 张琛, 刘威, 韩博阳. 非均质土壤条件下挖掘阻力计算模型研究[J]. 系统仿真学报, 2026, 38(5): 1320-1332. |
| [10] | 王伟, 刘东, 崔新豪, 李博, 肖依永, 任羿. 复杂项目多级动态挣值管理数字化模型及应用[J]. 系统仿真学报, 2026, 38(5): 1350-1364. |
| [11] | 彭莉峻, 苏庭琪, 刘沛津, 何林, 周协武, 张闽心. 融合人体关键点的实验室PPE规范穿戴检测方法[J]. 系统仿真学报, 2026, 38(5): 1365-1382. |
| [12] | 滕靖, 童文聪, 张中杰, 姚幸, 李君羡. 有轨电车交叉口速度自动引导方法及仿真评价[J]. 系统仿真学报, 2026, 38(5): 1426-1439. |
| [13] | 蒋圣超, 裴云庆, 翟宏营, 吴国键, 高放. 基于块编码绝热量子牛顿‒拉夫逊法的潮流计算[J]. 系统仿真学报, 2026, 38(5): 1453-1465. |
| [14] | 秦浪, 谢嘉成, 乔晓军, 王学文, 肖智杰. 执行器位姿异常的机器人轨迹规划调整方法[J]. 系统仿真学报, 2026, 38(5): 1466-1483. |
| [15] | 南焱栋, 朱金达, 路鑫彬, 秦志英, 齐丹丹, 丁智恒. 数字孪生驱动的核电连接套质检设备状态监测[J]. 系统仿真学报, 2026, 38(4): 1004-1017. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
