| 1 |
Dai Minghui, Luan Tom H, Zhou Su, et al. Joint Channel Allocation and Data Delivery for UAV-Assisted Cooperative Transportation Communications in Post-Disaster Networks[J]. IEEE Transactions on Intelligent Transportation Systems(S1524-9050), 2022, 23(9): 16676-16689.
|
| 2 |
Hosseini Maryam, Ghazizadeh Reza, Farhadi Hamed. Game Theory-Based Radio Resource Allocation in NOMA Vehicular Communication Networks Supported by UAV[J]. Physical Communication(S1874-4907), 2022, 52: 76-93.
|
| 3 |
Hong Libin, Wang Yue, Du Yichen, et al. UAV Search-and-Rescue Planning Using an Adaptive Memetic Algorithm[J]. Frontiers of Information Technology & Electronic Engineering(S2095-9184), 2021, 22(11): 1477-1491.
|
| 4 |
Xu Shufang, Li Linlin, Zhou Ziyun, et al. A Task Allocation Strategy of the UAV Swarm Based on Multi-Discrete Wolf Pack Algorithm[J]. Applied Sciences(S2076-3417), 2022, 12(1331): 1-21.
|
| 5 |
Wang Yao, Shi Yongkang, Liu Yunhui. Research on Improved Genetic Simulated Annealing Algorithm for Multi-UAV Cooperative Task Allocation[J]. Journal of Physics: Conference Series(S1742-6588), 2022, 2246(1): 1-9.
|
| 6 |
Wu Husheng, Li Hao, Xiao Renbin. A Blockchain Bee Colony Double Inhibition Labor Division Algorithm for Spatio-Temporal Coupling Task with Application to UAV Swarm Task Allocation[J]. Journal of Systems Engineering and Electronics(S1004-4132), 2021, 32(5): 1180-1199.
|
| 7 |
Yuan Xiaoxiang, Zhu Jie, Li Yixuan, et al. An Enhanced Genetic Algorithm for Unmanned Aerial Vehicle Logistics Scheduling[J]. IET Communications (Wiley-Blackwell)(S1751-8628), 2021, 15(10): 1402-1411.
|
| 8 |
Ribeiro Roberto G, Cota Luciano P, A M Euzébioet Thiago, et al. Unmanned-Aerial-Vehicle Routing Problem with Mobile Charging Stations for Assisting Search and Rescue Missions in Post Disaster Scenarios[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems(S2168-2216), 2021, 52(11): 6682-6696.
|
| 9 |
Song Byung Duk, Kyungsu Park, Kim Jonghoe. Persistent UAV Delivery Logistics: MILP Formulation and Efficient Heuristic[J]. Computers & Industrial Engineering(S0360-8352), 2018, 120: 418-428.
|
| 10 |
Albert A, Leira F S, Imsland L. UAV Path Planning Using MILP with Experiments[J]. Modeling, Identification and Control(S0332-7353), 2017, 38(1): 21-32.
|
| 11 |
李相民, 颜骥, 刘波, 等. 多智能体协同任务分配问题研究综述[J]. 计算机与数字工程, 2014, 42(12): 2443-2450.
|
|
Li Xiangmin, Yan Ji, Liu Bo, et al. A Survey of Multi-Agents Cooperative Task Allocation Research[J]. Computer & Digital Engineering, 2014, 42(12): 2443-2450.
|
| 12 |
廖雨翔. 智能移动收球机器人的控制系统及路径规划研究[D]. 安徽: 中国科学技术大学, 2015.
|
|
Liao Yuxiang. Research on Control System and Path Planning of Intelligent Ball Receiving Robot[D]. Anhui: University of Science and Technology China, 2015.
|
| 13 |
Zhu Daqi, Huang Huan, Yang Simon X. Dynamic Task Assignment and Path Planning of Multi-UAV System Based on an Improved Self-Organizing Map and Velocity Synthesis Method in Three-Dimensional Underwater Workspace(Article)[J]. IEEE Transactions on Cybernetics(S2168-2267), 2013, 43(2): 504-514.
|
| 14 |
Xie Tao, Guo Jiansheng, Zhang Xiaofeng, et al. Mathematical Problems in Engineering Improved CNP-Method-Based Local Real-Time Cooperative Task Allocation of Heterogeneous Multi-UAV in Communication-Constrained Environment[J]. Mathematical Problems in Engineering(S1024-123X), 2022, 1(3): 1-14.
|
| 15 |
Ye Fang, Chen Jie, Tian Yuan, et al. Cooperative Task Assignment of a Heterogeneous Multi-UAV System Using an Adaptive Genetic Algorithm[J]. Electronics(S2079-9292), 2020, 9(4): 1-20.
|
| 16 |
Yang Mi, Bi Wenhao, Zhang An, et al. A Distributed Task Reassignment Method in Dynamic Environment for Multi-UAV System[J]. Applied Intelligence(S0924-669X), 2022, 52(2): 1582-1601.
|
| 17 |
Zhan Cheng, Zeng Yong. Energy Minimization for Cellular-Connected UAV: From Optimization to Deep Reinforcement Learning[J]. IEEE Transactions on Wireless Communications(S1536-1276), 2022, 21(7): 5541-5555.
|
| 18 |
Liu Haoting, Ge Jianyue, Wang Yuan, et al. Multi-UAV Optimal Mission Assignment and Path Planning for Disaster Rescue Using Adaptive Genetic Algorithm and Improved Artificial Bee Colony Method[J]. Actuators(S2076-0825), 2022, 11(4): 1-30.
|
| 19 |
Peng Qiang, Wu Husheng, Li Na. Modeling and Solving the Dynamic Task Allocation Problem of Heterogeneous UAV Swarm in Unknown Environment[J]. Complexity(S1076-2787), 2022, 1(1): 1-14.
|
| 20 |
Rezende H B, Silva M. F, Santos M F, et al. Signal Estimation for UAV Control Loop Identification Using Artificial Immune Systems[C]//22nd International Conference on System Theory, Control and Computing (ICSTCC). Sinaia, Romania: IEEE, 2018: 579-584.
|
| 21 |
Zhang Jiandong, Chen Yuyang, Yang Qiming, et al. Dynamic Task Allocation of Multiple UAVs Based on Improved A-QCDPSO[J]. Electronics(S2079-9292), 2022, 11(7): 1028.
|
| 22 |
彭雅兰, 段海滨, 魏晨. 基于交替方向网络进化博弈的无人机集群任务分配[J]. 工程科学学报, 2022, 44(4): 792-800.
|
|
Peng Yalan, Duan Haibin, Wei Chen. UAV Swarm Task Allocation Algorithm Based on the Alternating Direction Method of Multipliers Network Potential Game Theory[J]. Chinese Journal of Engineering, 2022, 44(4): 792-800.
|
| 23 |
王浩淼, 段海滨, 魏晨. 基于合作竞争公共物品博弈的无人机集群动态资源分配[J]. 中国科学(信息科学), 2022, 52(9): 1598-1609.
|
|
Wang Haomiao, Duan Haibin, Wei Chen. Dynamic Resource Allocation of UAV Cluster Based on Cooperative Competition for Public Goods Game[J]. China Science(Information Science), 2022, 52(9): 1598-1609.
|
| 24 |
Bai Xiaoshan, Andres Fielbaum, Kronmü Maximilian, et al. Group-Based Distributed Auction Algorithms for Multi-Robot Task Assignment[J]. IEEE Transactions on Automation Science and Engineering(S1545-5955), 2022, 19(1): 1-12.
|
| 25 |
Choi H L, Brunet L, How J P. Consensus-Based Decentralized Auctions for Robust Task Allocation[J]. IEEE Transactions on Robotics(S1552-3098), 2009, 25(4): 912-926.
|
| 26 |
单永志, 黄得刚. 美军分布式作战概念发展的启示与建议[J]. 飞航导弹, 2020(11): 68-71.
|
|
Shan Yongzhi, Huang Degang. Enlightenment and Suggestions on the Development of the Concept of Distributed Operations in the US Military[J]. Aerodynamic Missile Journal, 2020(11): 68-71.
|
| 27 |
Zhang Na, Zhu Xiaobing, Gou Yahong. The Role of Artificial Intelligence and Autonomous Systems in the Decision-Making Center of the US Mosaic War[C]//2020 International Conference on Intelligent Computing and Human-Computer Interaction(ICHCI). IEEE, 2020: 1-6.
|
| 28 |
Johnson Luke B, Ponda Sameera S, Choi Han Lim, et al. Asynchronous Decentralized Task Allocation for Dynamic Environments[C]//AIAA. 2011.
|
| 29 |
Kim Keum Seong, Kim Ho Yeon, Choi Han Lim. Minimizing Communications in Decentralized Greedy Task Allocation[J]. Journal of Aerospace Information Systems(S1542-9423), 2019, 16(8): 340-345.
|
| 30 |
Kim Keum Seong, Kim Ho Yeon, Choi Han Lim. A Bid-Based Grouping Method for Communication-Efficient Decentralized Multi-UAV Task Allocation[J]. International Journal of Aeronautical and Space Sciences(S2093-274X), 2019, 3(1): 1-13.
|
| 31 |
Darren Smith, Jodie Wetherall, Stephen Woodhead, et al. A Cluster-Based Approach to Consensus Based Distributed Task Allocation[C]//2014 22nd Euromicro International Conference on Parallel, Distributed, and Network-Based Processing. Italy: IEEE, 2014: 428-431.
|
| 32 |
Fei Liguo, Deng Yong. A New Method to Identify Influential Nodes Based on Relative Entropy[J]. Chaos Solitons & Fractals(S0960-0779), 2017, 104(1): 257-267.
|
| 33 |
徐涛, 孟野. 踪迹聚类下组织实体的重要度排序方法[J]. 计算机应用, 2016, 36(5): 1284-1289.
|
|
Xu Tao, Meng Ye. Importance Sorting Method of Organizational Enities Based on Trace Clustering[J]. Journal of Computer Applications, 2016, 36(5): 1284-1289.
|
| 34 |
Zhu Jingcheng, Wang Lunwen, Wu Tao. A Sorting Method of Node Based on Eigenvector and Closeness Centrality[J]. Journal of Physics: Conference Series(S1742-6588), 2021, 2031: 012043.
|
| 35 |
Wang Zhixiao, Chen Zhaotong, Zhao Ya. A Novel Local Maximum Potential Node Search Algorithm for Complex Network Community Detection Based on Topological Potential[J]. Journal of Computational Information Systems(S1553-9105), 2014, 10(5): 2091-2098.
|
| 36 |
Gao Fan, Huang Da. A Node Sorting Method for K2 Algorithm in Bayesian Network Structure Learning[C]//2020 IEEE International Conference on Artificial Intelligence and Computer Applications(ICAICA). Dalian: IEEE, 2020: 106-110.
|
| 37 |
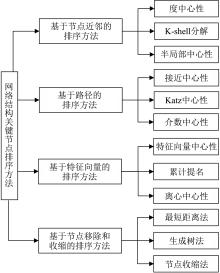
任晓龙, 吕琳媛. 网络重要节点排序方法综述[J]. 科学通报, 2014, 59(13): 1175-1197.
|
|
Ren Xiaolong, Linyuan Lü. Review of Ranking Nodes in Complex Networks[J]. Chinese Science Bulletin, 2014, 59(13): 1175-1197.
|
 ), 邓汉强, 高佳隆, 黄健(
), 邓汉强, 高佳隆, 黄健(