

系统仿真学报 ›› 2023, Vol. 35 ›› Issue (12): 2602-2613.doi: 10.16182/j.issn1004731x.joss.22-0873
李倩( ), 陶冶(), 李辉
), 陶冶(), 李辉
收稿日期:2022-07-29
修回日期:2022-09-26
出版日期:2023-12-15
发布日期:2023-12-12
通讯作者:
陶冶
E-mail:1786234631@qq.com;ye.tao@qust.edu.cn
第一作者简介:李倩(1997-),女,硕士生,研究方向为智能制造。E-mail:1786234631@qq.com
基金资助:
Li Qian(), Tao Ye(), Li Hui
Received:2022-07-29
Revised:2022-09-26
Online:2023-12-15
Published:2023-12-12
Contact:
Tao Ye
E-mail:1786234631@qq.com;ye.tao@qust.edu.cn
摘要:
绘制地图是自动化物流领域的重要环节,目前普遍采用即时定位与建图(SLAM)方法,但在大规模场景下,机器人常在区域边缘地带反复测扫从而积累误差,无法快速构建高精度完整地图。提出一种基于辅助路径跟踪的机器人自主建图方法,对给定的初始草图进行栅格化去噪,通过多段三次多项式对辅助路径进行拟合改进,采用改进的纯跟踪算法引导机器人建图,改善SLAM建图过程的总距离和时间。实验表明:该算法在地图完整性、准确度和建图效率方面,较现有V-SLAM、QRCode-SLAM方法均有改善,为快速高效地构建地图提供了一种可视化的双向交互途径。
中图分类号:
李倩,陶冶,李辉 . 改进路径跟踪算法在机器人SLAM中的应用研究[J]. 系统仿真学报, 2023, 35(12): 2602-2613.
Li Qian,Tao Ye,Li Hui . Application of Improved Path Tracking Algorithm in Robot SLAM[J]. Journal of System Simulation, 2023, 35(12): 2602-2613.
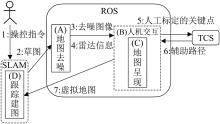
图1
辅助路径生成流程
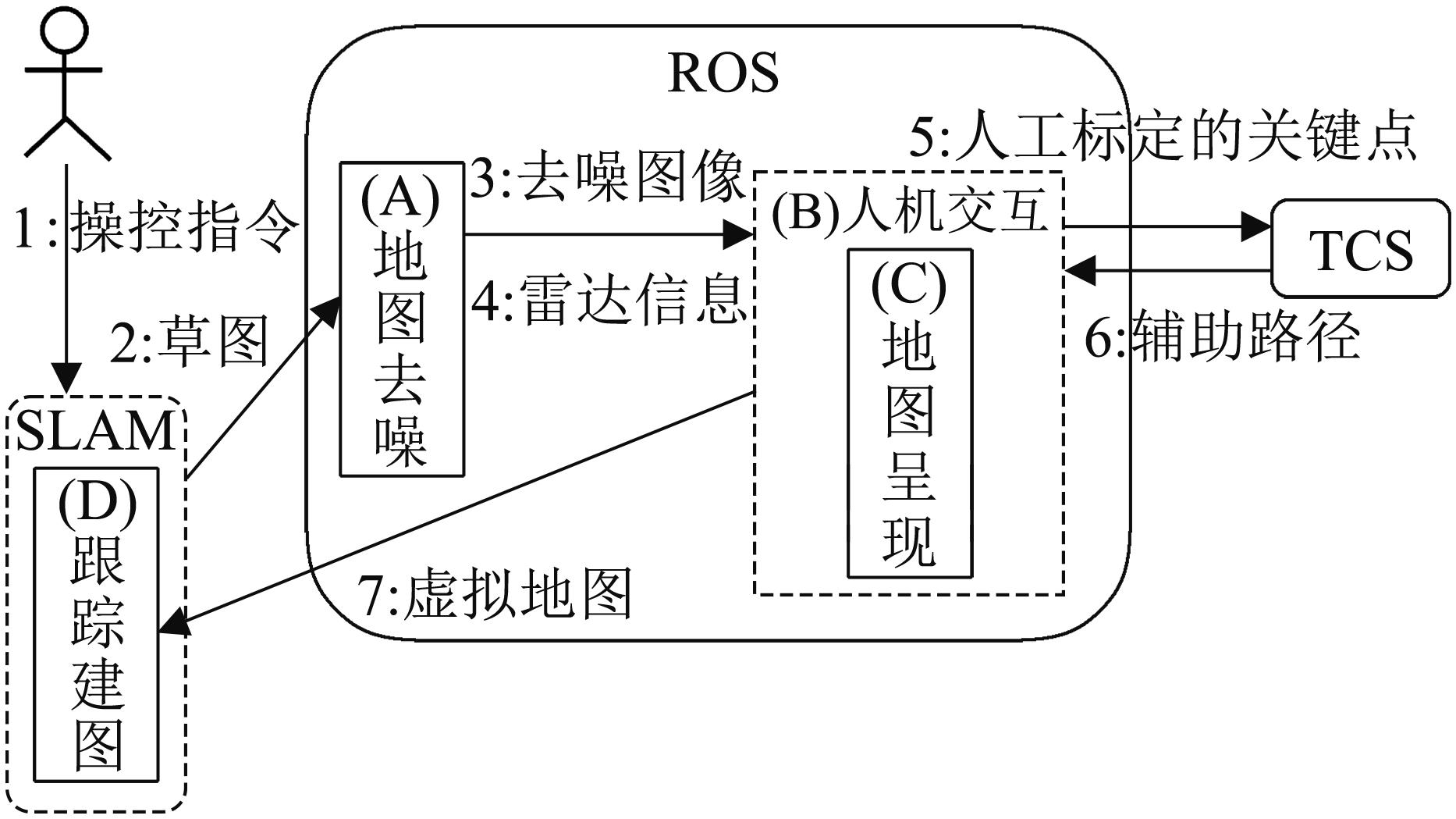
图2
辅助路径生成细节图
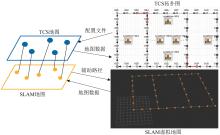
图3
地图数据双向更新
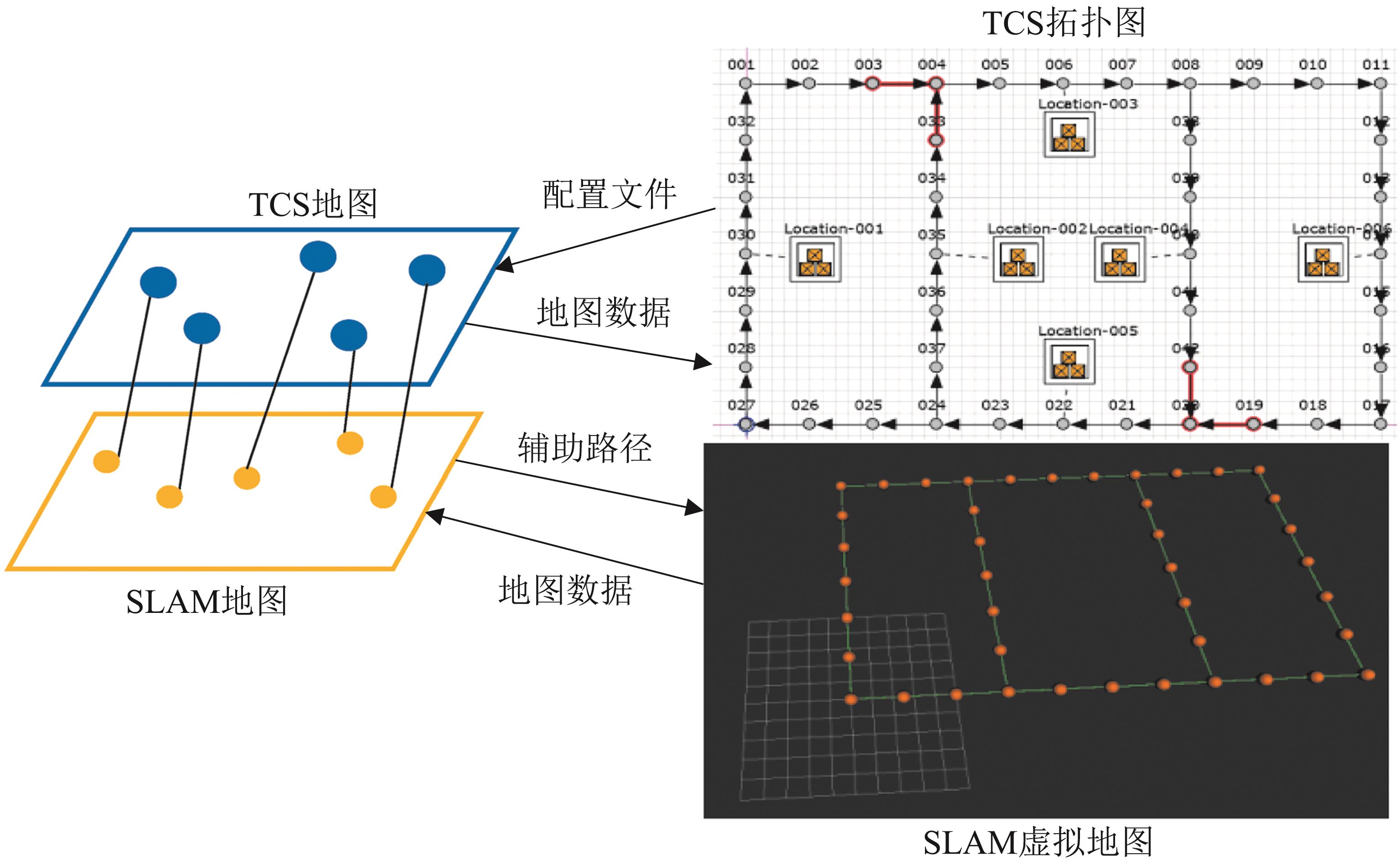
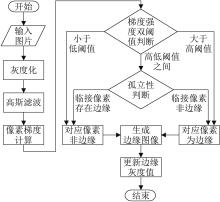
图4
去噪模块流程
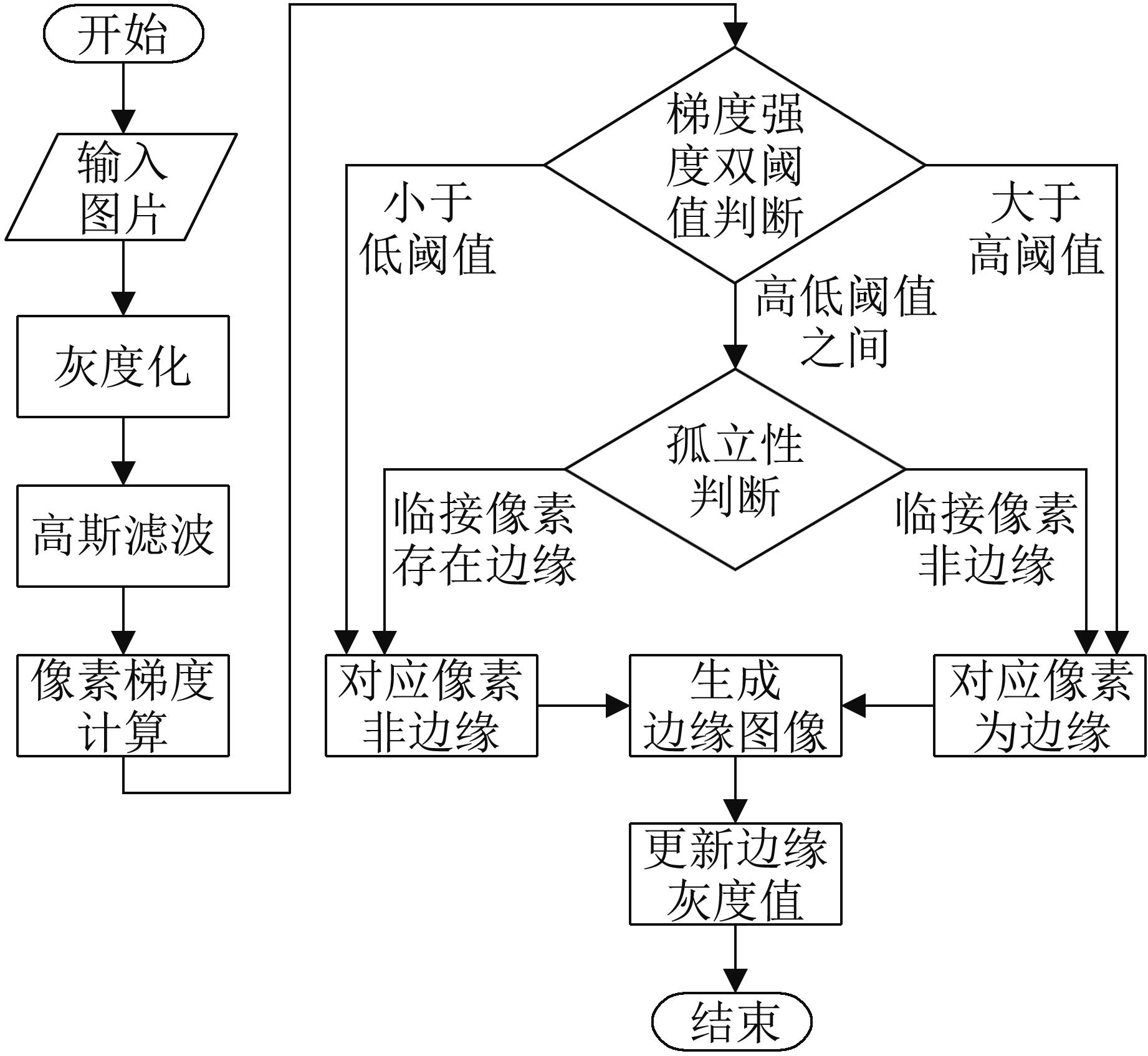
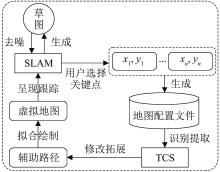
图5
地图交互设计
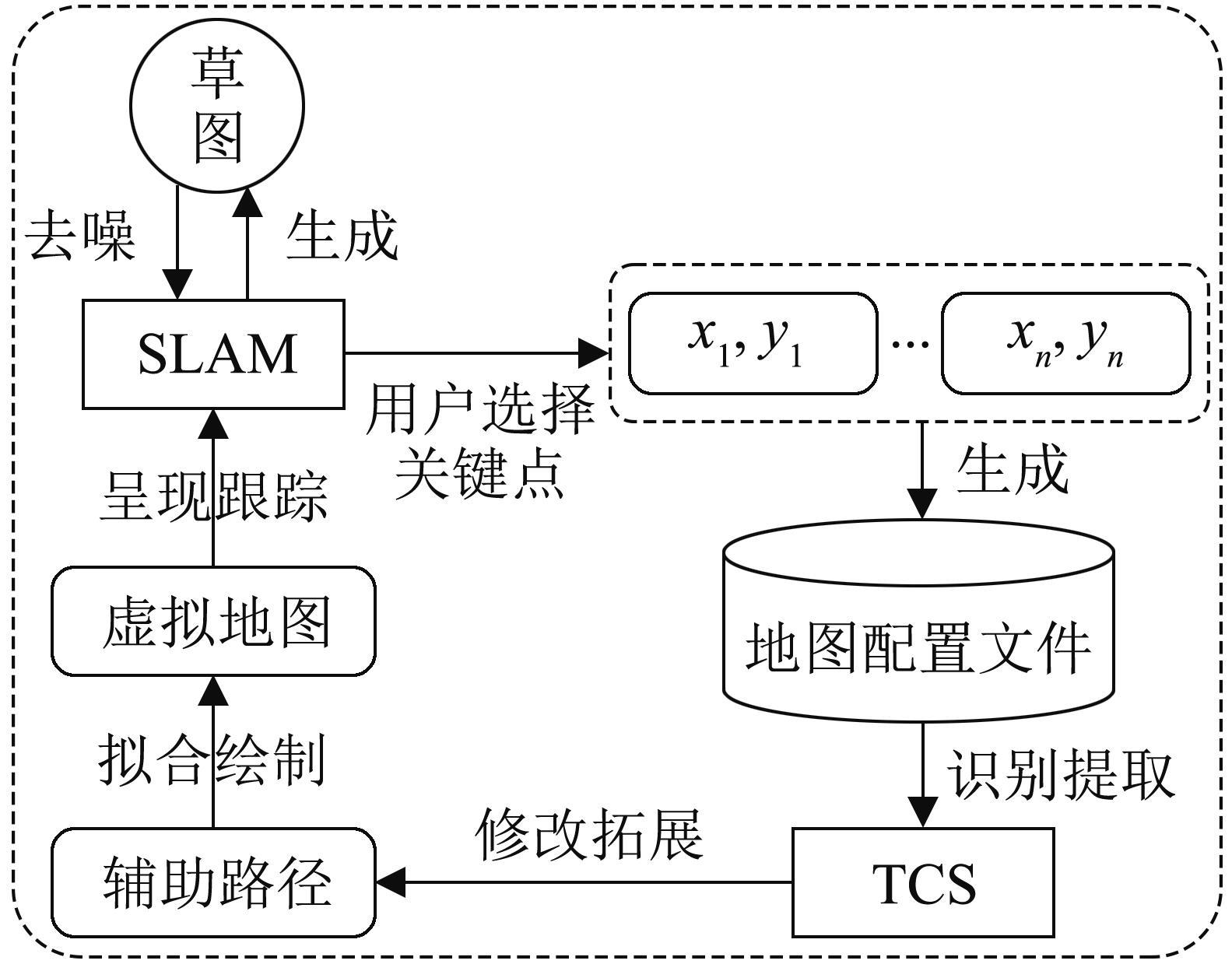

图6
原始与优化路径对比
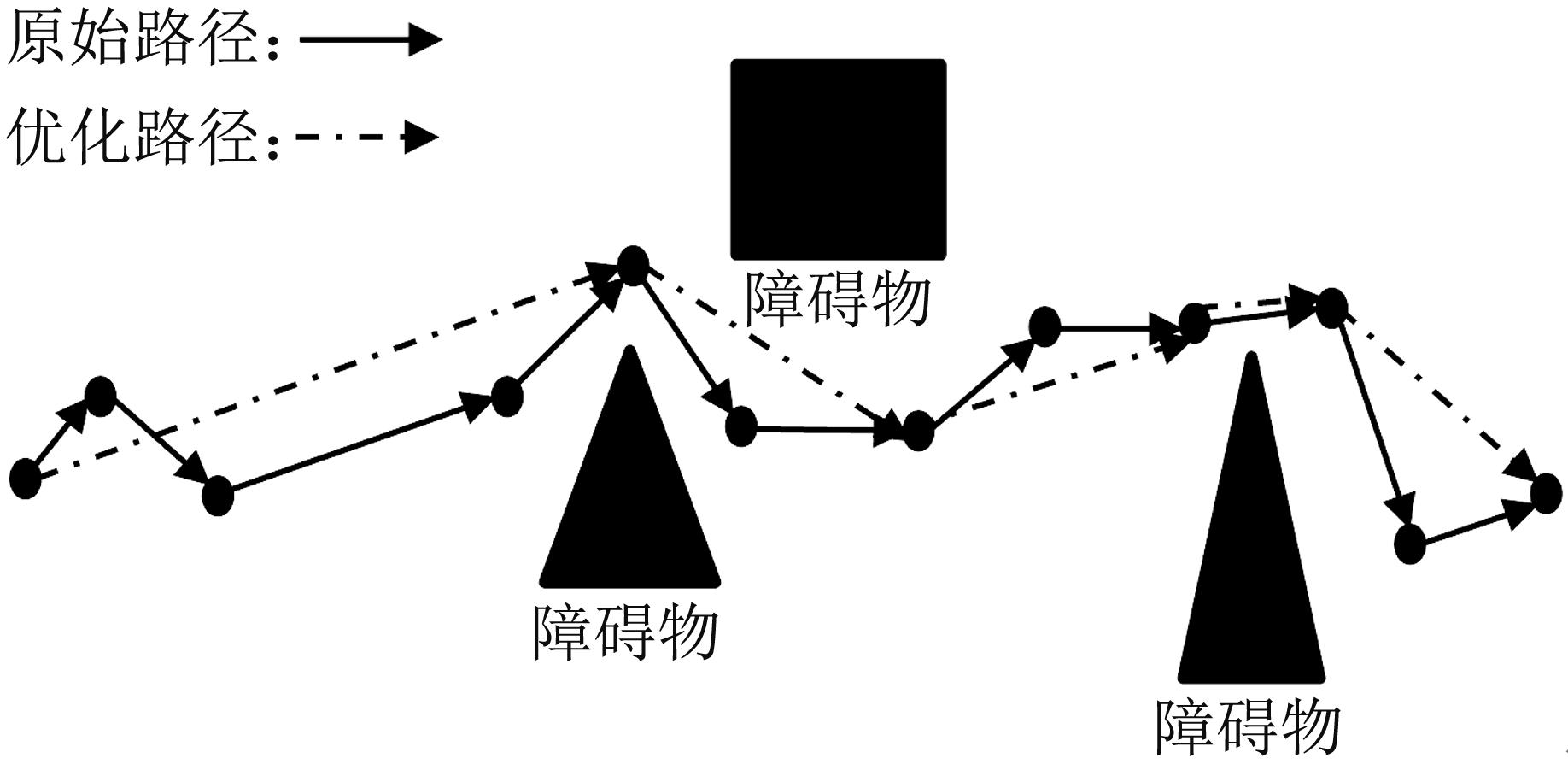
图7
基于辅助路径的跟踪建图
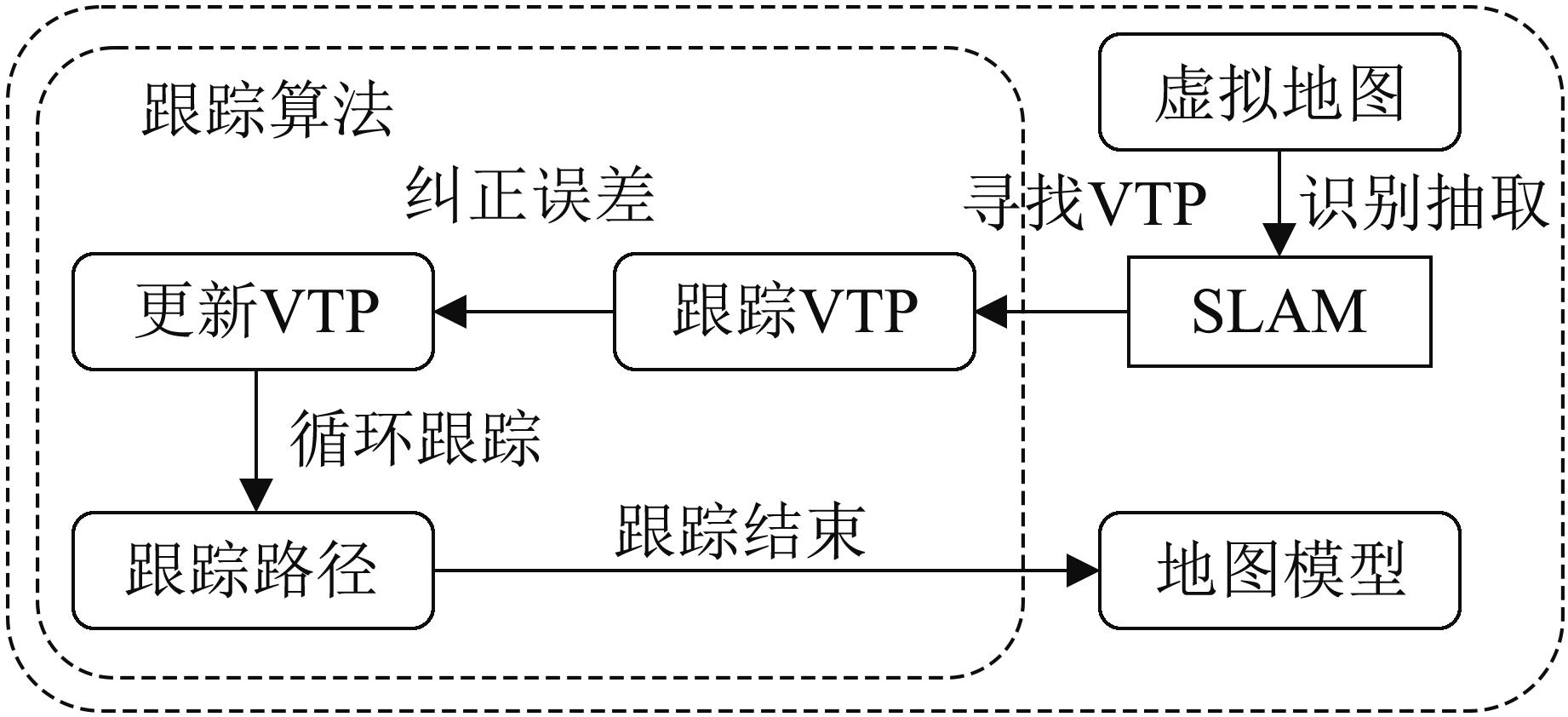
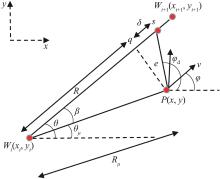
图8
VTP路径跟踪控制几何结构
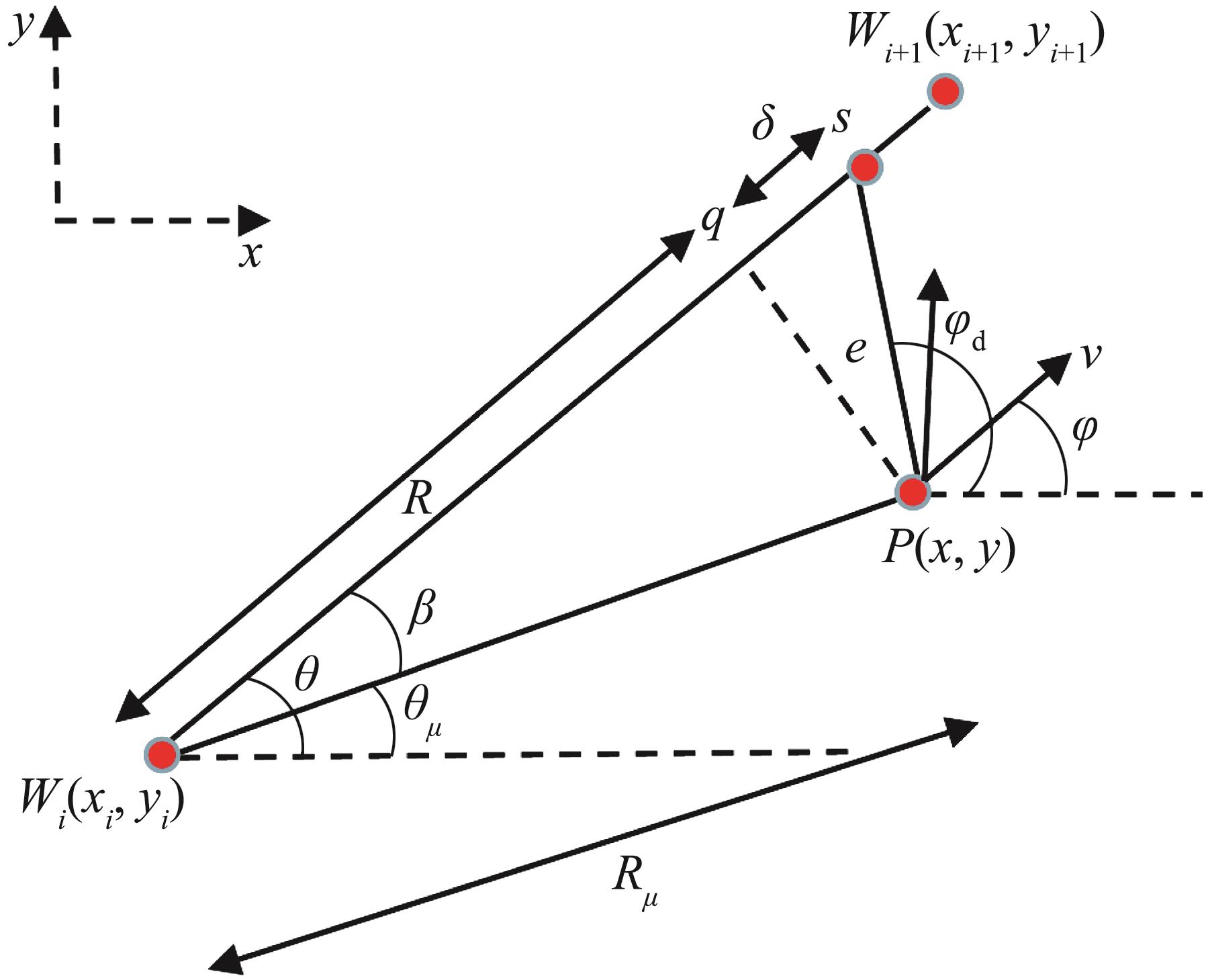
图9
前瞻距离系数与路径匹配程度
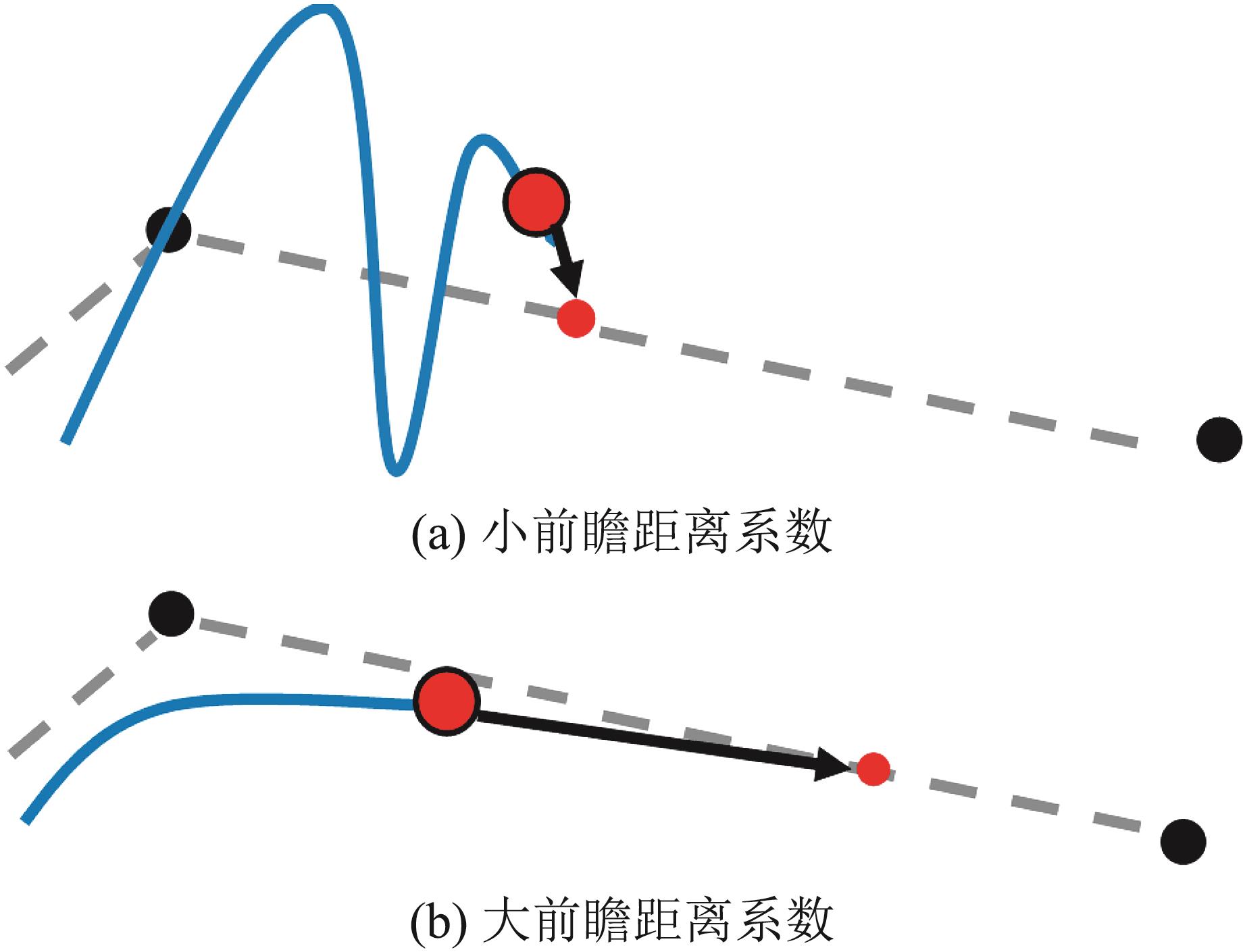
表1
不同前瞻距离系数在相同速度下的跟踪情况
| 前瞻距离系数 | 最大横向误差/m | 最大航向误差/rad |
|---|---|---|
| 0.5 | 0.71 | 0.610 |
| 1.0 | 0.11 | 0.070 |
| 1.5 | 0.16 | 0.087 |
| 2.0 | 0.21 | 0.085 |
图10
去噪对比
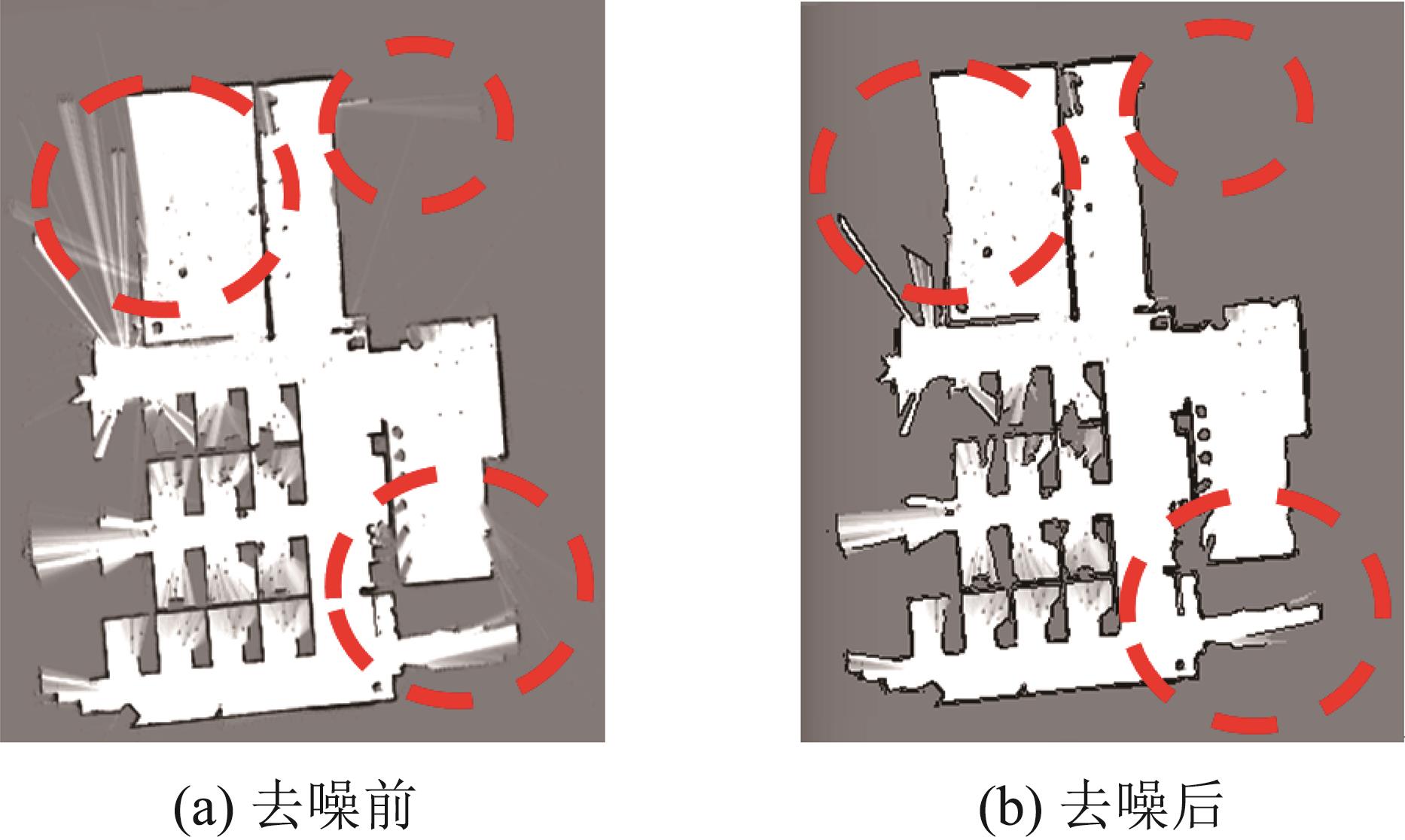
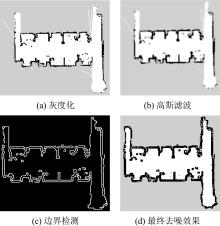
图11
去噪效果
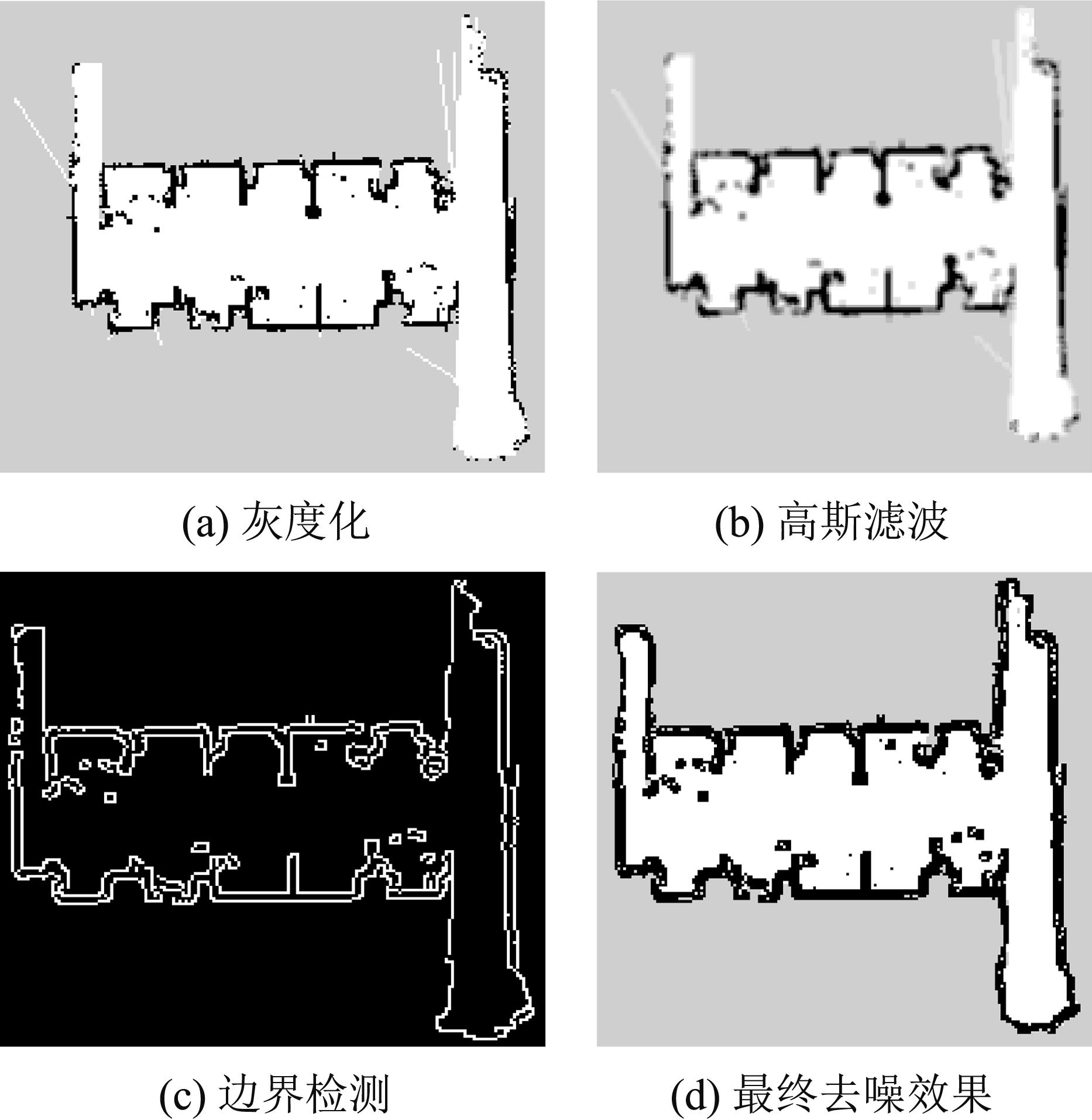
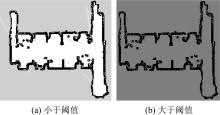
图12
阈值判断
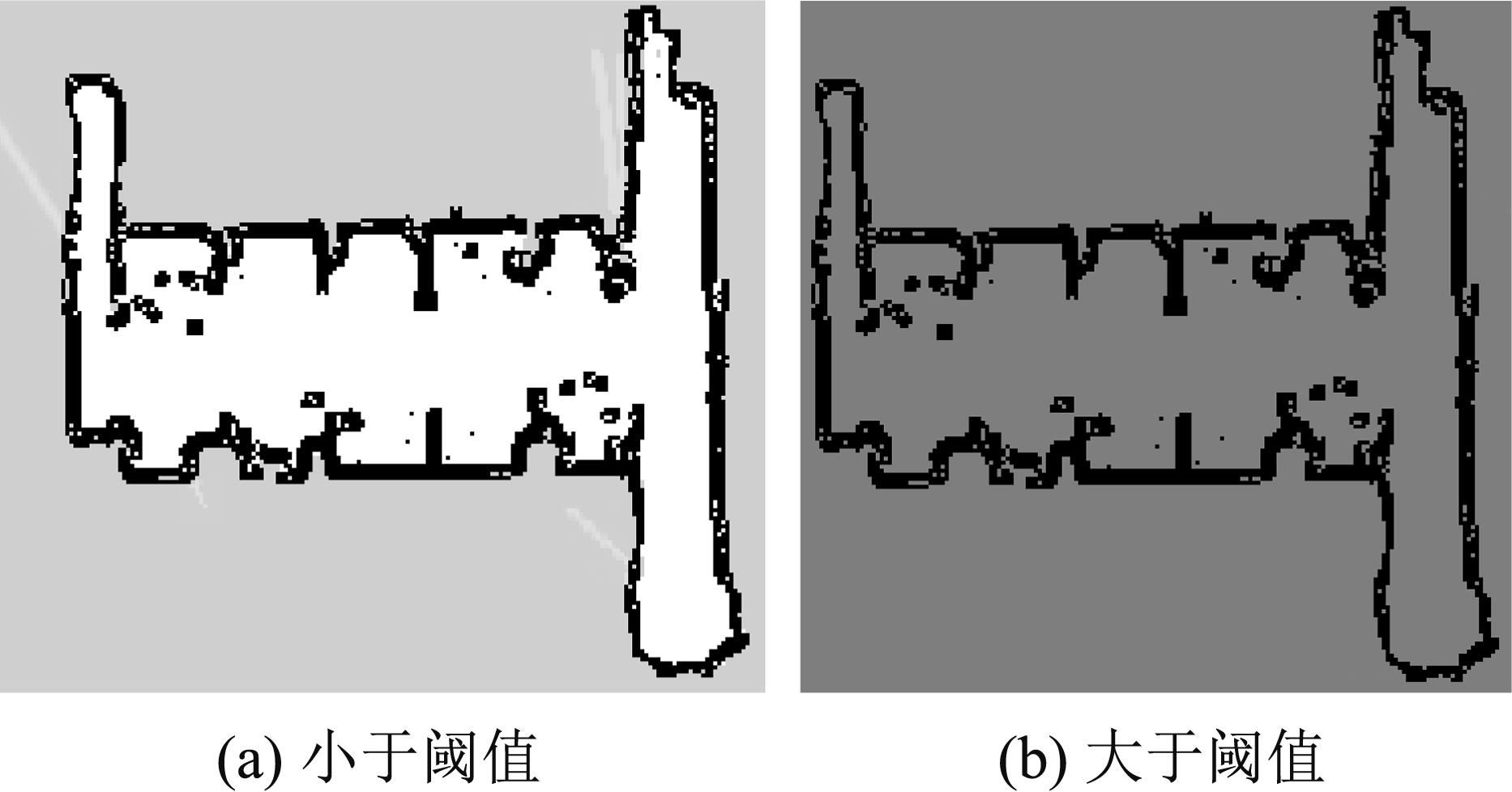

图13
基于VTP的路径跟踪算法效果对比
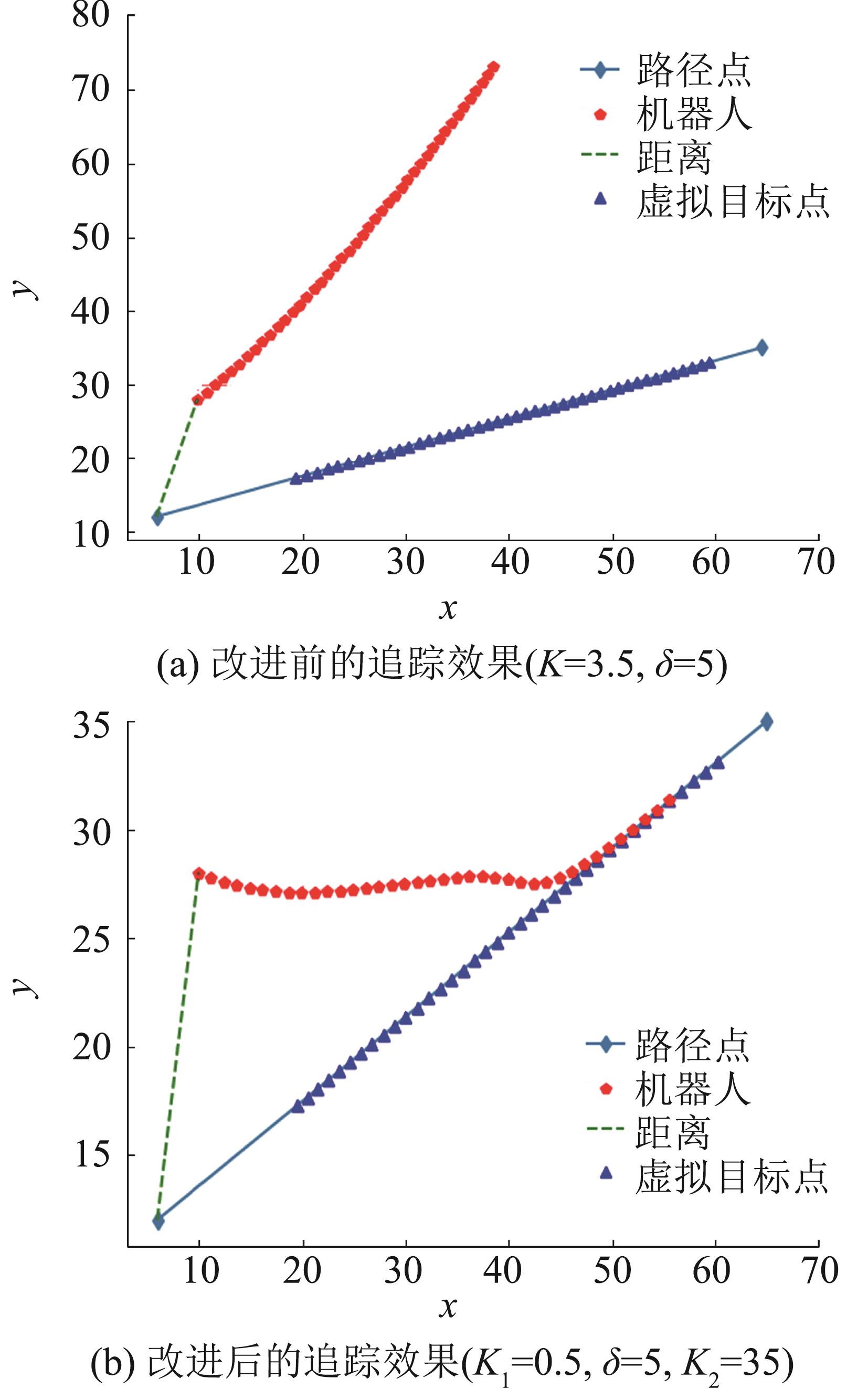
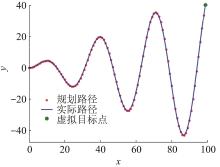
图14
基于VTP的路径跟踪算法跟踪效果
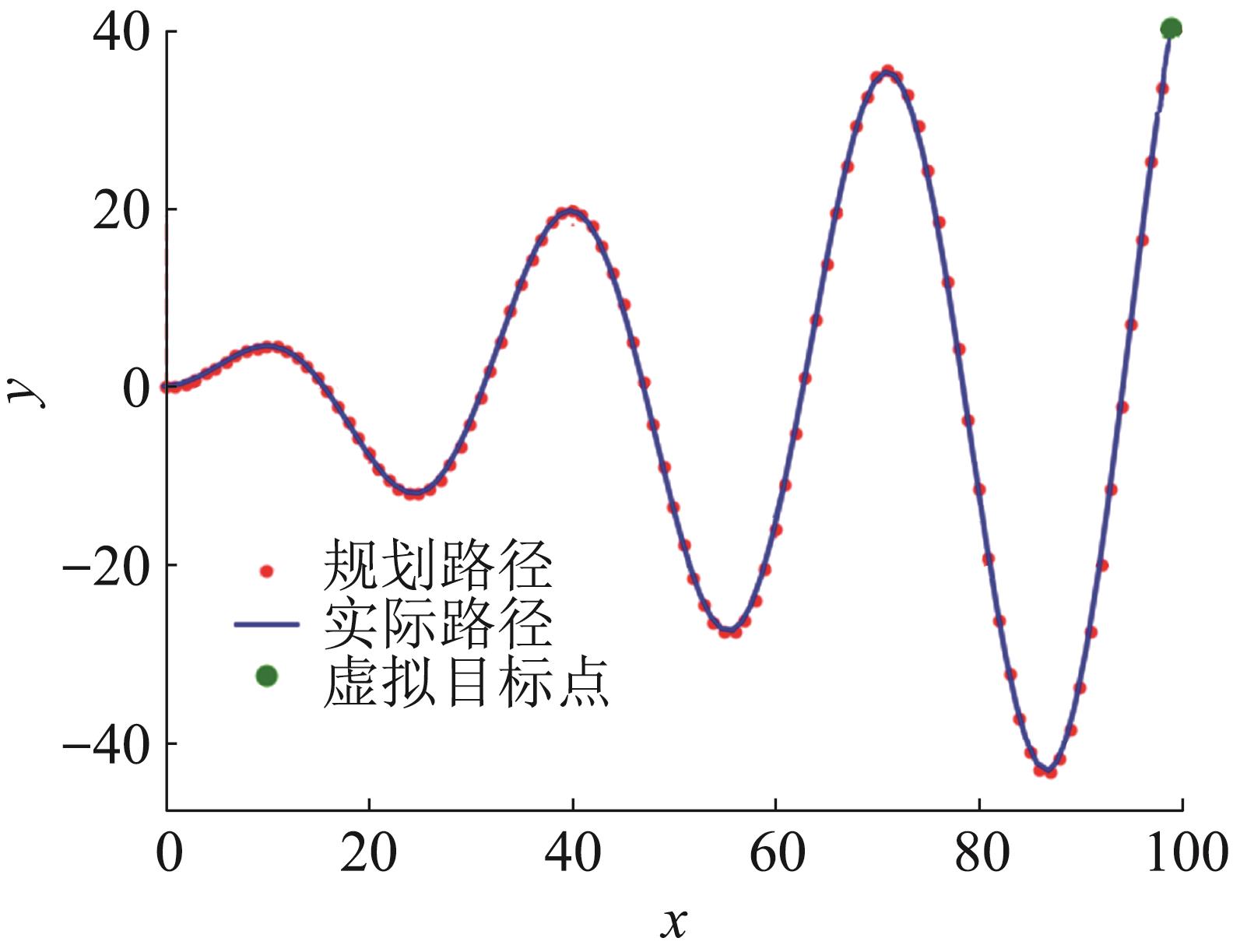
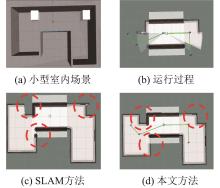
图15
小型室内场景虚拟仿真实验
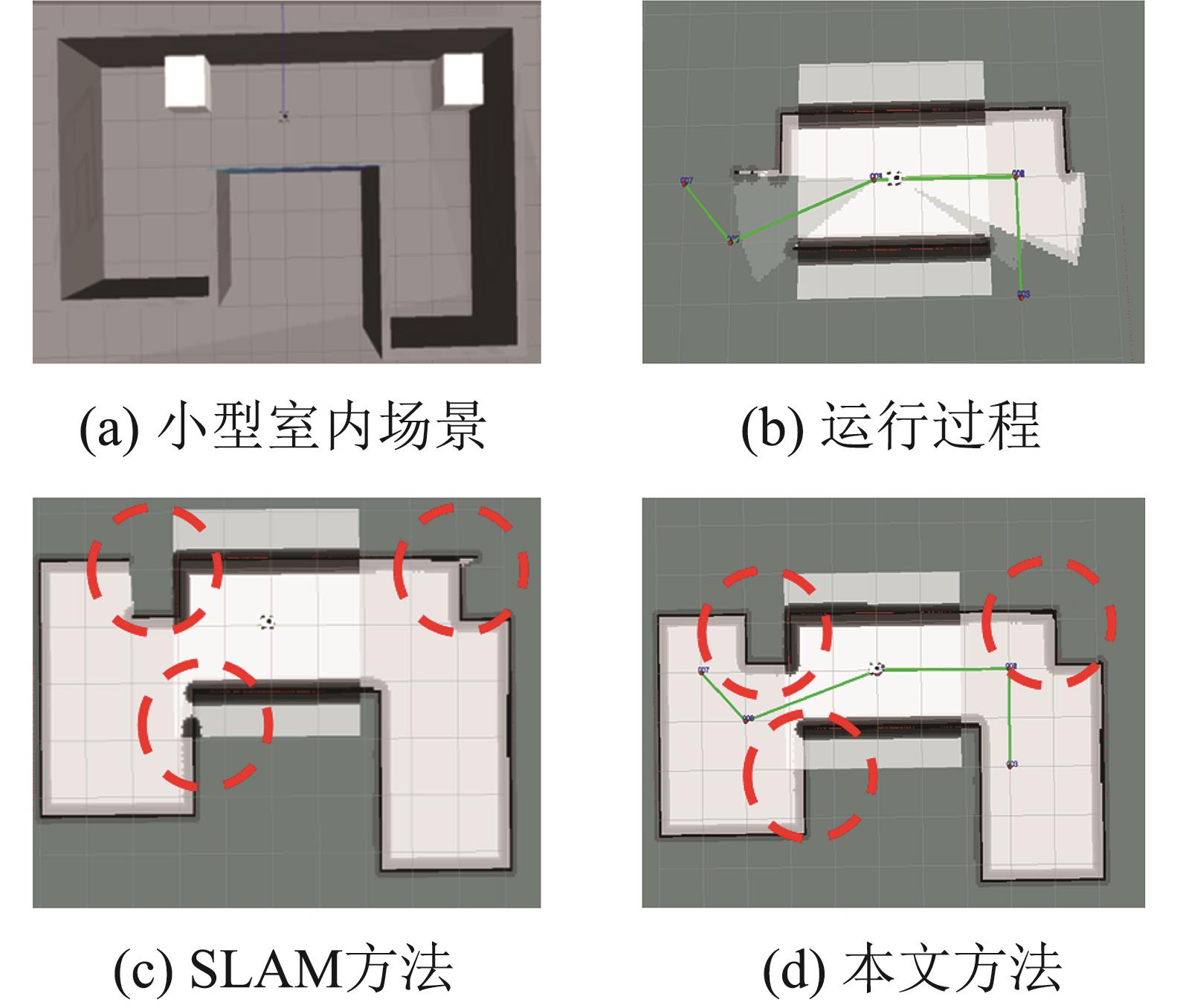
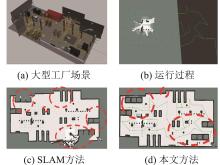
图16
大型工厂场景虚拟仿真实验
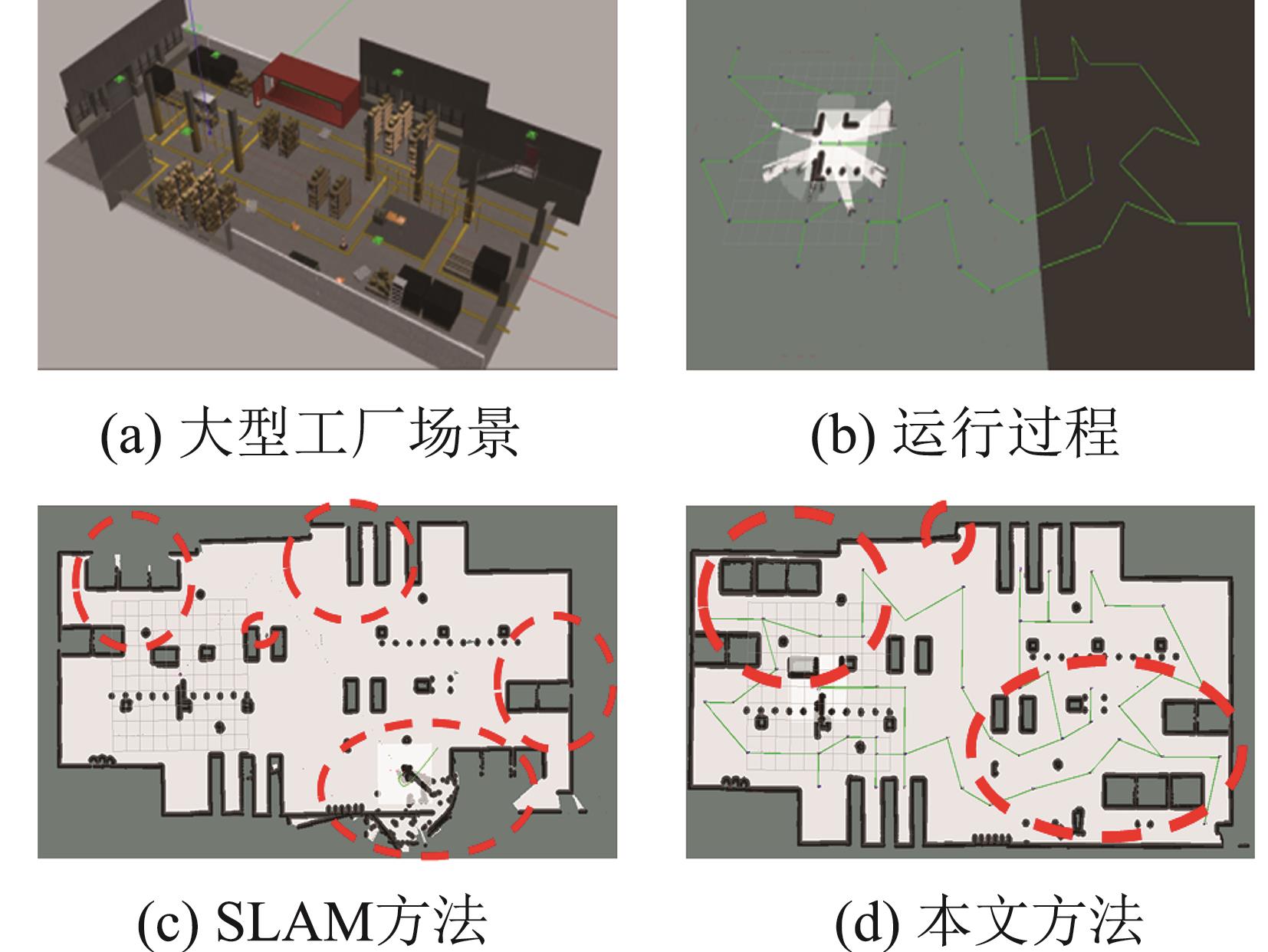
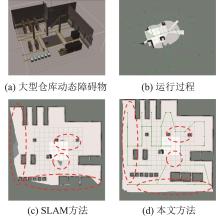
图17
大型仓库动态障碍物场景虚拟仿真实验
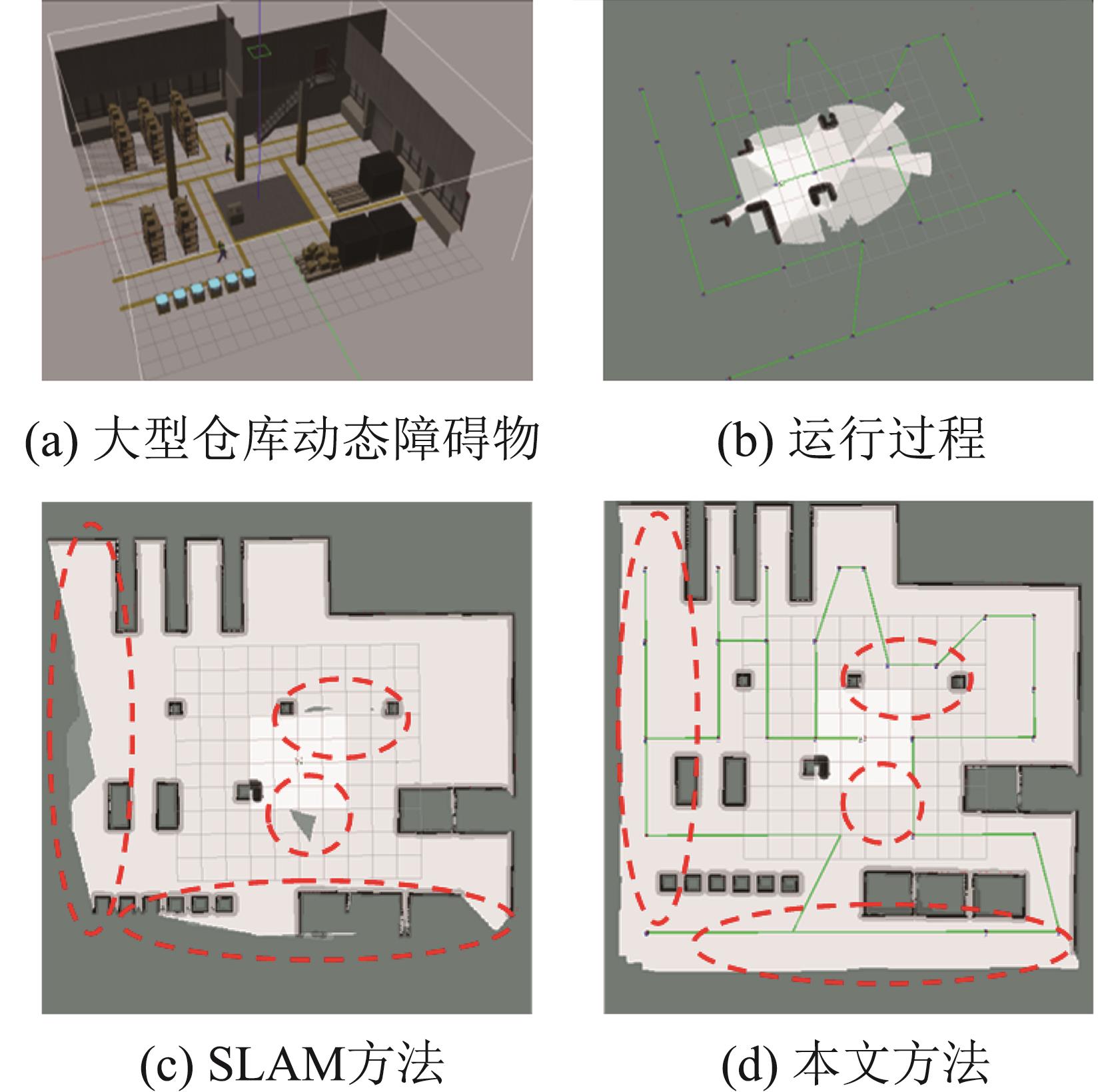
表2
本文方法与传统SLAM对比
| 场景规模/m2 | 建图方法 | 用时 | I/% | λ/% |
|---|---|---|---|---|
10×6 ( | 本文方法 | 37 min 25 s | 100 | 99.82 |
| SLAM | 50 min 5 s | 93.65 | 93.21 | |
45×22 ( | 本文方法 | 3 h 17 min 3 s | 99.82 | 99.05 |
| SLAM | 3 h 55 min 11 s | 94.09 | 75.45 | |
21×22 ( | 本文方法 | 4 h 19 min 37 s | 99.33 | 97.70 |
| SLAM | 5 h 11 min 32 s | 93.70 | 72.41 |

图18
真实走廊实验场景

表3
5种方法效果对比
| 使用方法 | 辅助程度 | 平均时间 | I/% | λ/% |
|---|---|---|---|---|
| RRT | 四边形边界 | 15 min 37 s | 74.70 | 77.39 |
| QRCode-SLAM | QRCode | 11 min 49 s | 83.43 | 79.27 |
| V-SLAM | 深度相机 | 9 min 32 s | 70.16 | 63.20 |
| V+Laser-SLAM | Laser+相机 | 10 min 25 s | 86.96 | 89.32 |
| 本文方法 | 辅助路径 | 7 min 4 s | 99.09 | 99.52 |
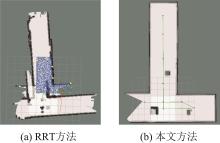
图19
构建地图及结果
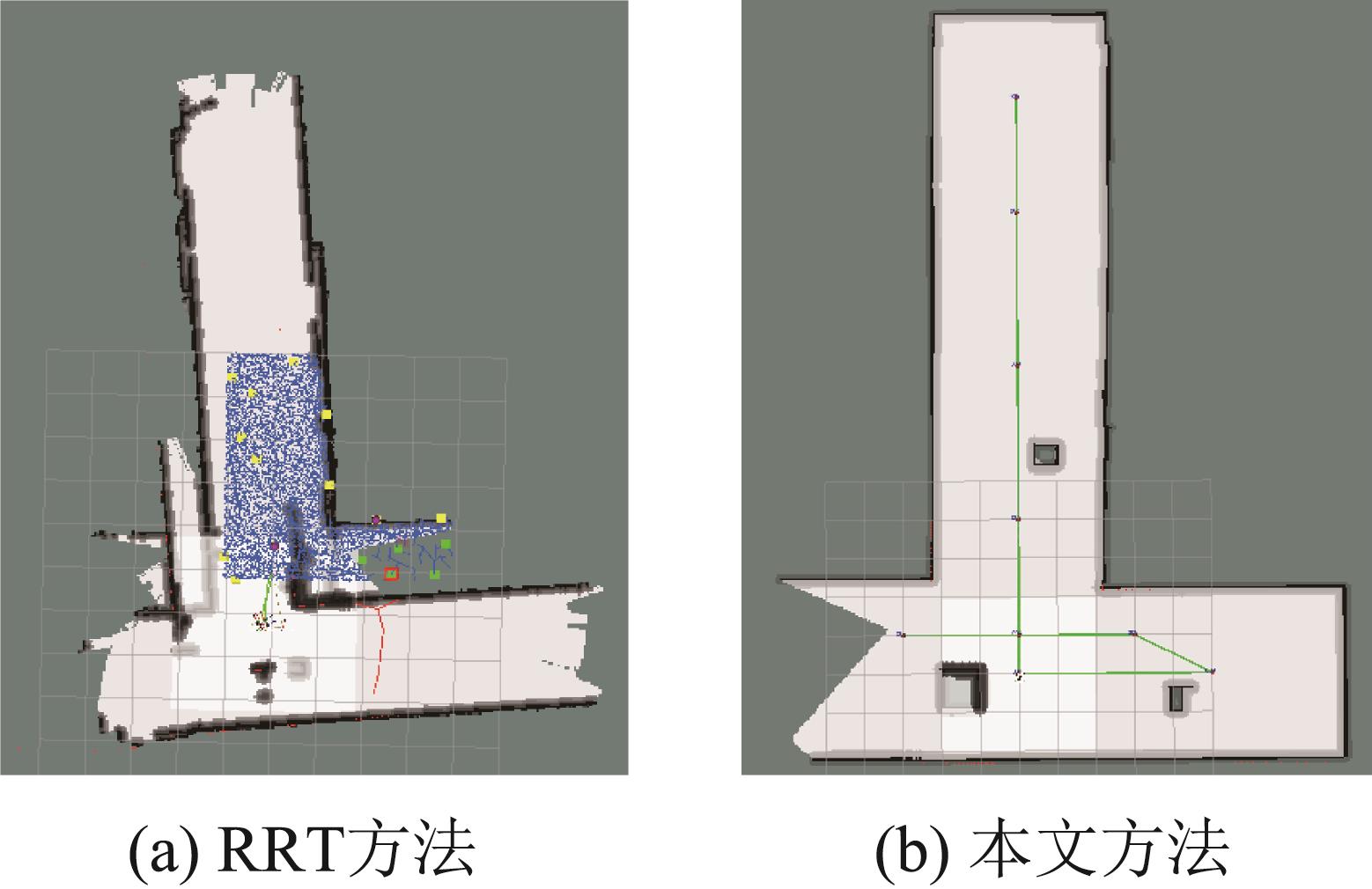

图20
坡度和凹凸不平环境
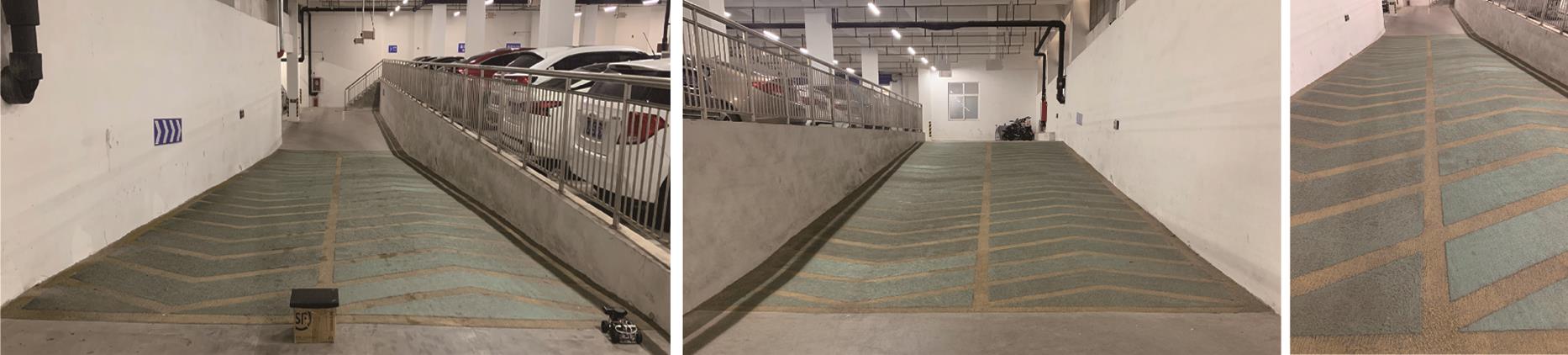
表4
坡道5种方法结果对比
| 使用方法 | 辅助程度 | 平均时间 | I/% | λ/% |
|---|---|---|---|---|
| RRT | 四边形边界 | 11 min 32 s | 67.03 | 59.13 |
| QRCode-SLAM | QRCode | 10 min 8 s | 80.26 | 68.00 |
| V-SLAM | 深度相机 | 5 min 48 s | 64.31 | 53.57 |
| V+Laser-SLAM | Laser+相机 | 6 min 12 s | 85.25 | 90.19 |
| 本文方法 | 辅助路径 | 4 min 15 s | 98.89 | 97.78 |
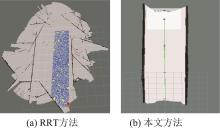
图21
坡道地图对比
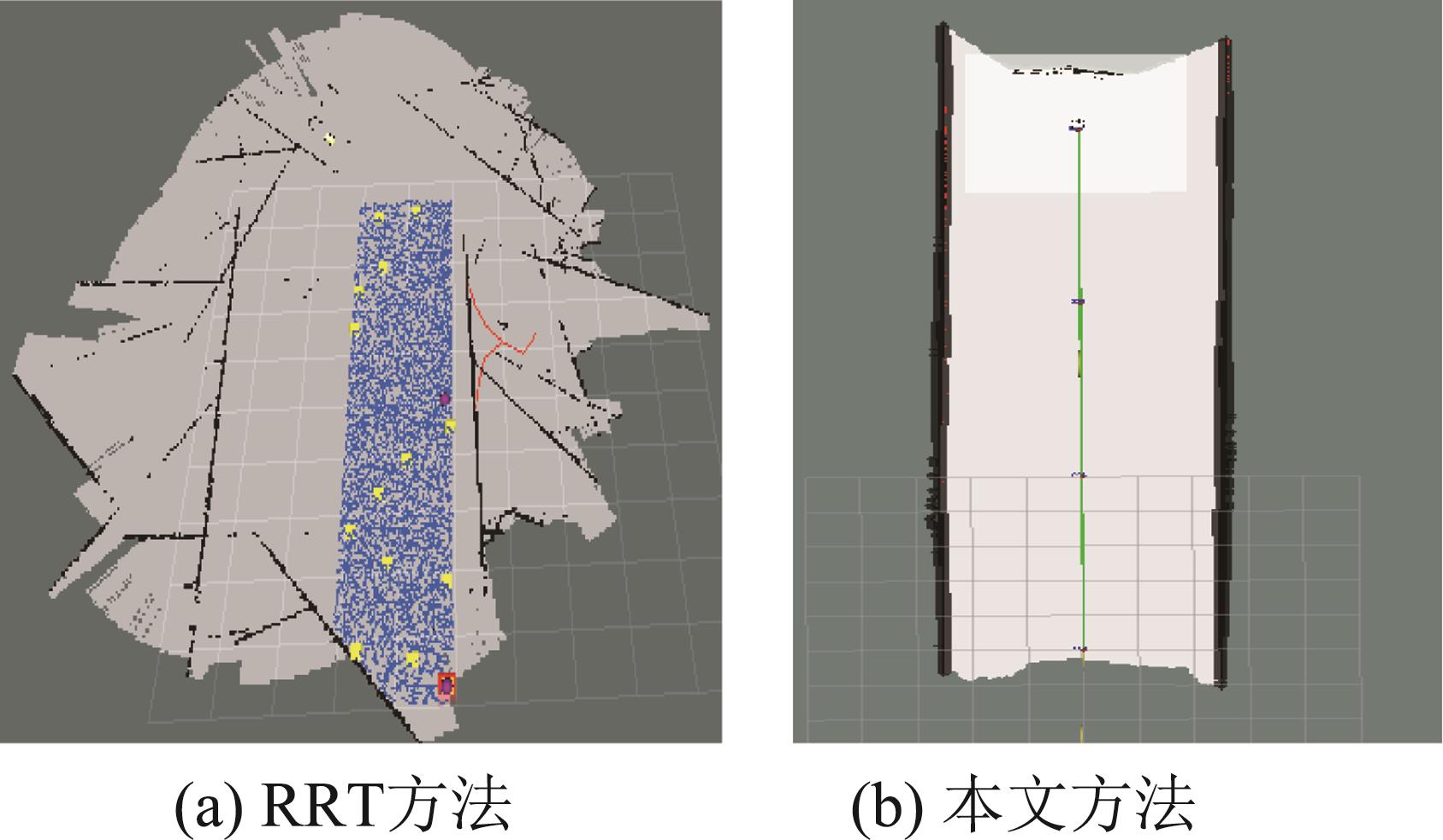
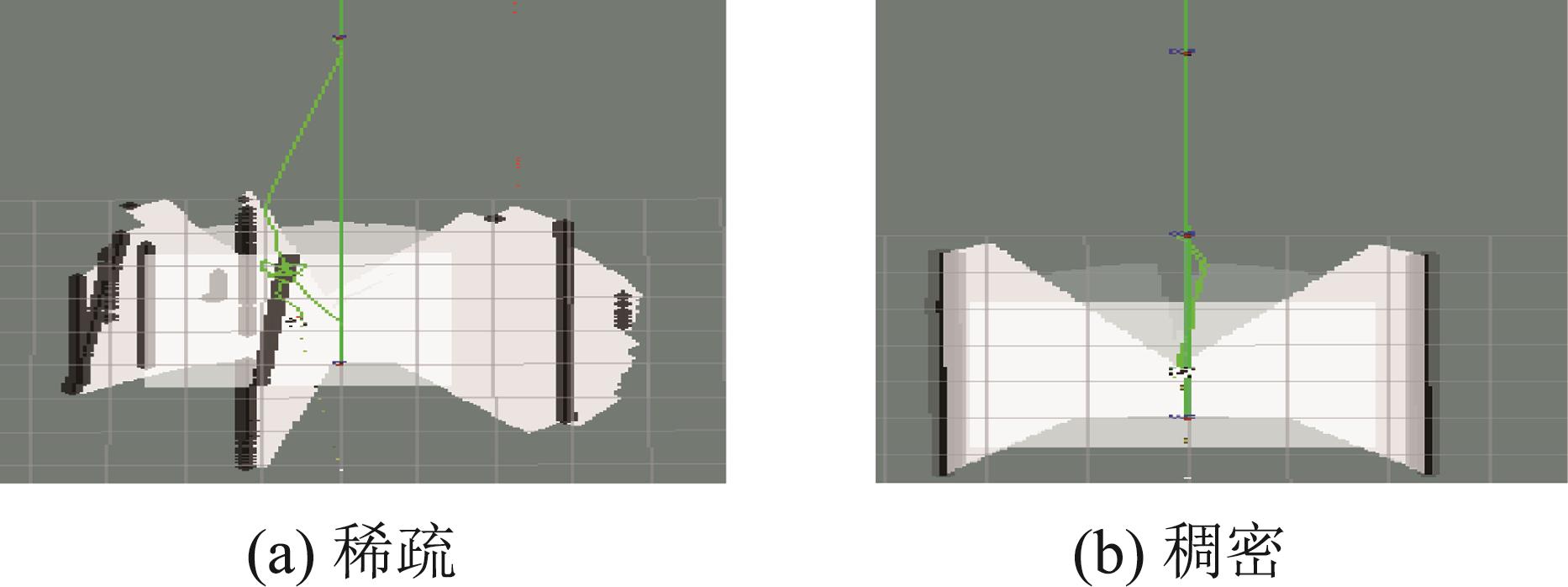
图22
关键点稀疏与稠密对比
| 1 | Yuan Zhiheng, Yang Zhengmao, Lingling Lü, et al. A Bi-level Path Planning Algorithm for Multi-AGV Routing Problem[J]. Electronics, 2020, 9(9): 1351. |
| 2 | 田野, 陈宏巍, 王法胜, 等. 室内移动机器人的SLAM算法综述[J]. 计算机科学, 2021, 48(9): 223-234. |
| Tian Ye, Chen Hongwei, Wang Fasheng, et al. Overview of SLAM Algorithms for Mobile Robots[J]. Computer Science, 2021, 48(9): 223-234. | |
| 3 | Cadena C, Carlone L, Carrillo H, et al. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-perception Age[J]. IEEE Transactions on Robotics, 2016, 32(6): 1309-1332. |
| 4 | Dong Jing, Ren Xingyu, Han Songlai, et al. UAV Vision Aided INS/Odometer Integration for Land Vehicle Autonomous Navigation[J]. IEEE Transactions on Vehicular Technology, 2022, 71(5): 4825-4840. |
| 5 | Feng Daquan, Wang Chunqi, He Chunlong, et al. Kalman-filter-based Integration of IMU and UWB for High-accuracy Indoor Positioning and Navigation[J]. IEEE Internet of Things Journal, 2020, 7(4): 3133-3146. |
| 6 | Rajamohan D, Kim J, Garratt M, et al. Image Based Localization Under Large Perspective Difference Between Sfm and SLAM Using Split Sim(3) Optimization[J]. Autonomous Robots, 2022, 46(3): 437-449. |
| 7 | Fang Baofu, Mei Gaofei, Yuan Xiaohui, et al. Visual SLAM for Robot Navigation in Healthcare Facility[J]. Pattern Recognition, 2021, 113: 107822. |
| 8 | 李森, 范平清. 兴趣区域地图提取与ROS的多机器人SLAM地图合成研究[J]. 智能计算机与应用, 2022, 12(1): 168-171, 175. |
| Li Sen, Fan Pingqing. Map Extraction of Interest Region and ROS Multi-robot SLAM Mapmerge[J]. Intelligent Computer and Applications, 2022, 12(1): 168-171, 175. | |
| 9 | 徐俊波, 吕宏武, 高子晗. 基于增强现实的智能交互式地图构建方法研究[J]. 自动化应用, 2020(10): 75-77, 82. |
| Xu Junbo, Hongwu Lü, Gao Zihan. Research on the Construction Method of Intelligent Interactive Map Based on Augmented Reality[J]. Automation Application, 2020(10): 75-77, 82. | |
| 10 | 王晨捷, 罗斌, 李成源, 等. 无人机视觉SLAM协同建图与导航[J]. 测绘学报, 2020, 49(6): 767-776. |
| Wang Chenjie, Luo Bin, Li Chengyuan, et al. The Collaborative Mapping and Navigation Based on Visual SLAM in UAV Platform[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(6): 767-776. | |
| 11 | 王桐, 尚光涛, 高山. 基于启发式的多机器人SLAM地图融合方法研究[J]. 系统仿真学报, 2022, 34(7): 1449-1458. |
| Wang Tong, Shang Guangtao, Gao Shan. Research on Multi-robot SLAM Map FusionMethod Based on Heuristics[J]. Journal of System Simulation, 2022, 34(7): 1449-1458. | |
| 12 | Zhao Leyang, Yan Li, Hu Xiao, et al. Efficient and High Path Quality Autonomous Exploration and Trajectory Planning of UAV in an Unknown Environment[J]. ISPRS International Journal of Geo-Information, 2021, 10(10): 631. |
| 13 | Becerra I, Yervilla-Herrera H, Antonio E, et al. On the Local Planners in the RRT* for Dynamical Systems and Their Reusability for Compound Cost Functionals[J]. IEEE Transactions on Robotics, 2022, 38(2): 887-905. |
| 14 | Liu Shuang, Li Shenghao, Pang Luchao, et al. Autonomous Exploration and Map Construction of a Mobile Robot Based on the TGHM Algorithm[J]. Sensors, 2020, 20(2): 490. |
| 15 | Yang Yang, Li Yankai, Wen Xing, et al. An Optimal Goal Point Determination Algorithm for Automatic Navigation of Agricultural Machinery: Improving the Tracking Accuracy of the Pure Pursuit Algorithm[J]. Computers and Electronics in Agriculture, 2022, 194: 106760. |
| 16 | Li Cong, Yuan Ruiman, Gao Hong, et al. Characteristics of Blue-green Laser Downlink Cross-media Transmission Under Different Weather Conditions[J]. Acta Photonica Sinica, 2021, 50(12): 1201003. |
| 17 | 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10): 127-143. |
| Xiong Lu, Yang Xing, Zhuo Guirong, et al. Review on Motion Control of Autonomous Vehicles[J]. Journal of Mechanical Engineering, 2020, 56(10): 127-143. | |
| 18 | Wang Lihui, Chen Zongliang, Zhu Wenxing. An Improved Pure Pursuit Path Tracking Control Method Based on Heading Error Rate[J]. Industrial Robot: The International Journal of Robotics Research and Application, 2022, 49(5): 973-980. |
| 19 | 岳伟韬, 苏婧, 谷志珉, 等. 占据栅格地图的最佳栅格大小与地图精度[J]. 机器人, 2020, 42(2): 199-206. |
| Yue Weitao, Su Jing, Gu Zhimin, et al. Best Grid Size of the Occupancy Grid Map and Its Accuracy[J]. Robot, 2020, 42(2): 199-206. | |
| 20 | Savci K, Stove A G, Francesco De Palo, et al. Noise Radar-overview and Recent Developments[J]. IEEE Aerospace and Electronic Systems Magazine, 2020, 35(9): 8-20. |
| 21 | Du Gaoming, Wu Jiting, Cao Hongfang, et al. A Real-time Effective Fusion-based Image Defogging Architecture on FPGA[J]. ACM Transactions on Multimedia Computing, Communications, and Applications, 2021, 17(3): 93. |
| 22 | Wen Junlin, Zhu Yufan, Liu Jianbo, et al. Smartphone-based Surface Plasmon Resonance Sensing Platform for Rapid Detection of Bacteria[J]. RSC Advances, 2022, 12(21): 13045-13051. |
| 23 | Suryanarayana G, Chandran K, Khalaf O I, et al. Accurate Magnetic Resonance Image Super-resolution Using Deep Networks and Gaussian Filtering in the Stationary Wavelet Domain[J]. IEEE Access, 2021, 9: 71406-71417. |
| 24 | Wu Fangsheng, Zhu Changan, Xu Jinxiu, et al. Research on Image Text Recognition Based on Canny Edge Detection Algorithm and K-means Algorithm[J]. International Journal of System Assurance Engineering and Management, 2022, 13(1): 72-80. |
| 25 | 佘丽萱, 康佳, 王楠, 等. 一种新的棉花根系图像阈值分割方法[J]. 河北大学学报(自然科学版), 2022, 42(2): 124-130. |
| She Lixuan, Kang Jia, Wang Nan, et al. A New Threshold Segmentation Method for Cotton Root Images[J]. Journal of Heibei University(Natural Science Edition), 2022, 42(2): 124-130. | |
| 26 | Kim J, Qi Meng, Kim M, et al. Biogas Reforming Integrated With PEM Electrolysis Via Oxygen Storage Process for Green Hydrogen Production: From Design to Robust Optimization[J]. Energy Conversion and Management, 2022, 251: 115021. |
| 27 | Uddin S, Haque I, Lu Haohui, et al. Comparative Performance Analysis of K-nearest Neighbour(KNN) Algorithm and Its Different Variants for Disease Prediction[J]. Scientific Reports, 2022, 12(1): 6256. |
| [1] | 李若晴, 赵瑶池, 胡祝华, 戚文璐, 刘广丰. TOHF:一种针对资源受限室内VSLAM的特征提取器[J]. 系统仿真学报, 2025, 37(3): 691-703. |
| [2] | 姜丽梅, 陈信威. 动态场景下基于特征点筛选的视觉SLAM算法[J]. 系统仿真学报, 2025, 37(3): 753-762. |
| [3] | 刘佳, 张增伟, 陈大鹏, 黄楠瑄, 王斌, 宋泓. 基于改进YOLOv8提升SLAM在AR中的定位精度[J]. 系统仿真学报, 2025, 37(11): 2701-2713. |
| [4] | 李维刚, 甘磊, 王永强. 基于LiDAR-IMU的动态场景点云建图方法[J]. 系统仿真学报, 2025, 37(1): 95-106. |
| [5] | 姚万业, 庞泽伟, 孙沛杰, 王祝. 基于窗口化匹配估计的ORB-SLAM算法研究[J]. 系统仿真学报, 2024, 36(9): 2032-2042. |
| [6] | 刘金辉, 陈孟元, 韩朋朋, 陈何宝, 张玉坤. 面向移动机器人大视角运动的图神经网络视觉SLAM算法[J]. 系统仿真学报, 2024, 36(5): 1043-1060. |
| [7] | 史蓝兮, 颜文旭, 倪宏宇, 赵峰. 基于改进目标检测的动态场景SLAM研究[J]. 系统仿真学报, 2024, 36(4): 1028-1042. |
| [8] | 符强, 腾先云, 纪元法, 任风华. 基于改进特征描述的SLAM动态算法研究[J]. 系统仿真学报, 2024, 36(11): 2712-2721. |
| [9] | 焦嵩鸣, 姚鑫, 丁辉, 钟宇飞. 适应于环境空间变化的激光雷达SLAM建图方法[J]. 系统仿真学报, 2023, 35(8): 1788-1798. |
| [10] | 陈志强, 曹梦龙, 赵文彬. 帝王蝶算法优化粒子滤波在SLAM中的应用研究[J]. 系统仿真学报, 2023, 35(6): 1351-1361. |
| [11] | 王浩宇, 龚光红, 蔡继红, 叶必鹏, 周照方, 梅铮, 李妮. 基于战场元宇宙的动态三维场景感知[J]. 系统仿真学报, 2023, 35(10): 2262-2278. |
| [12] | 王桐, 尚光涛, 高山. 基于启发式的多机器人SLAM地图融合方法研究[J]. 系统仿真学报, 2022, 34(7): 1449-1458. |
| [13] | 林士琪, 王纪凯, 裴浩渊, 赵皓, 陈宗海. 基于物体关系描述的单目语义SLAM方法[J]. 系统仿真学报, 2022, 34(2): 278-284. |
| [14] | 于雅楠, 史敦煌, 华春杰. 特征点法SLAM视觉里程计自适应优化算法[J]. 系统仿真学报, 2022, 34(1): 104-112. |
| [15] | 张新良, 李阳, 赵运基. 一种基于时空切片的SLAM关键帧提取方法[J]. 系统仿真学报, 2018, 30(5): 1724-1729. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
