

系统仿真学报 ›› 2024, Vol. 36 ›› Issue (4): 1028-1042.doi: 10.16182/j.issn1004731x.joss.22-1332
• 论文 • 上一篇
史蓝兮1( ), 颜文旭1(), 倪宏宇2, 赵峰2
), 颜文旭1(), 倪宏宇2, 赵峰2
收稿日期:2022-11-09
修回日期:2023-01-06
出版日期:2024-04-15
发布日期:2024-04-18
通讯作者:
颜文旭
E-mail:2066760176@qq.com;ywx01@jiangnan.edu.cn
第一作者简介:史蓝兮(1997-),女,硕士生,研究方向为视觉SLAM。E-mail:2066760176@qq.com
基金资助:
Shi Lanxi1(), Yan Wenxu1(), Ni Hongyu2, Zhao Feng2
Received:2022-11-09
Revised:2023-01-06
Online:2024-04-15
Published:2024-04-18
Contact:
Yan Wenxu
E-mail:2066760176@qq.com;ywx01@jiangnan.edu.cn
摘要:
针对单目SLAM在动态场景下存在的对极约束误匹配问题,提出一种基于目标检测的动态特征点选择 方法 ,通过在特征提取时剔除SLAM系统前端图像帧中动态特征点,提高SLAM的定位精度。提出了一个改进的目标检测网络,利用重叠面积、距离相似度和余弦相似度构建描述边界框的回归损失函数,实现目标的准确定位,获得当前图像帧中物体特征点范围。判断物体类别,对于标记为动态的物体根据目标检测结果剔除前端图像帧中的动态特征点。根据静态特征点,采用对极约束进行两帧图像间的特征匹配估计位姿,对单目相机运动进行跟踪、建图与闭环检测。通过对目标检测网络的主干进行结构重参数化改进,提升推理过程的速度,保证整体系统运行的实时性。在公开数据集KITTI的11个序列上的实验结果表明:改进后的系统比ORB-SLAM3系统定位精度提升了23.4%,帧率可以达到30 帧/s以上,在保证实时运行的条件下能有效提高动态场景下单目SLAM系统定位精度。
中图分类号:
史蓝兮,颜文旭,倪宏宇等 . 基于改进目标检测的动态场景SLAM研究[J]. 系统仿真学报, 2024, 36(4): 1028-1042.
Shi Lanxi,Yan Wenxu,Ni Hongyu,et al . Research on Dynamic Scene SLAM Based on Improved Object Detection[J]. Journal of System Simulation, 2024, 36(4): 1028-1042.
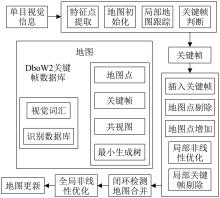
图1
ORB-SLAM3结构
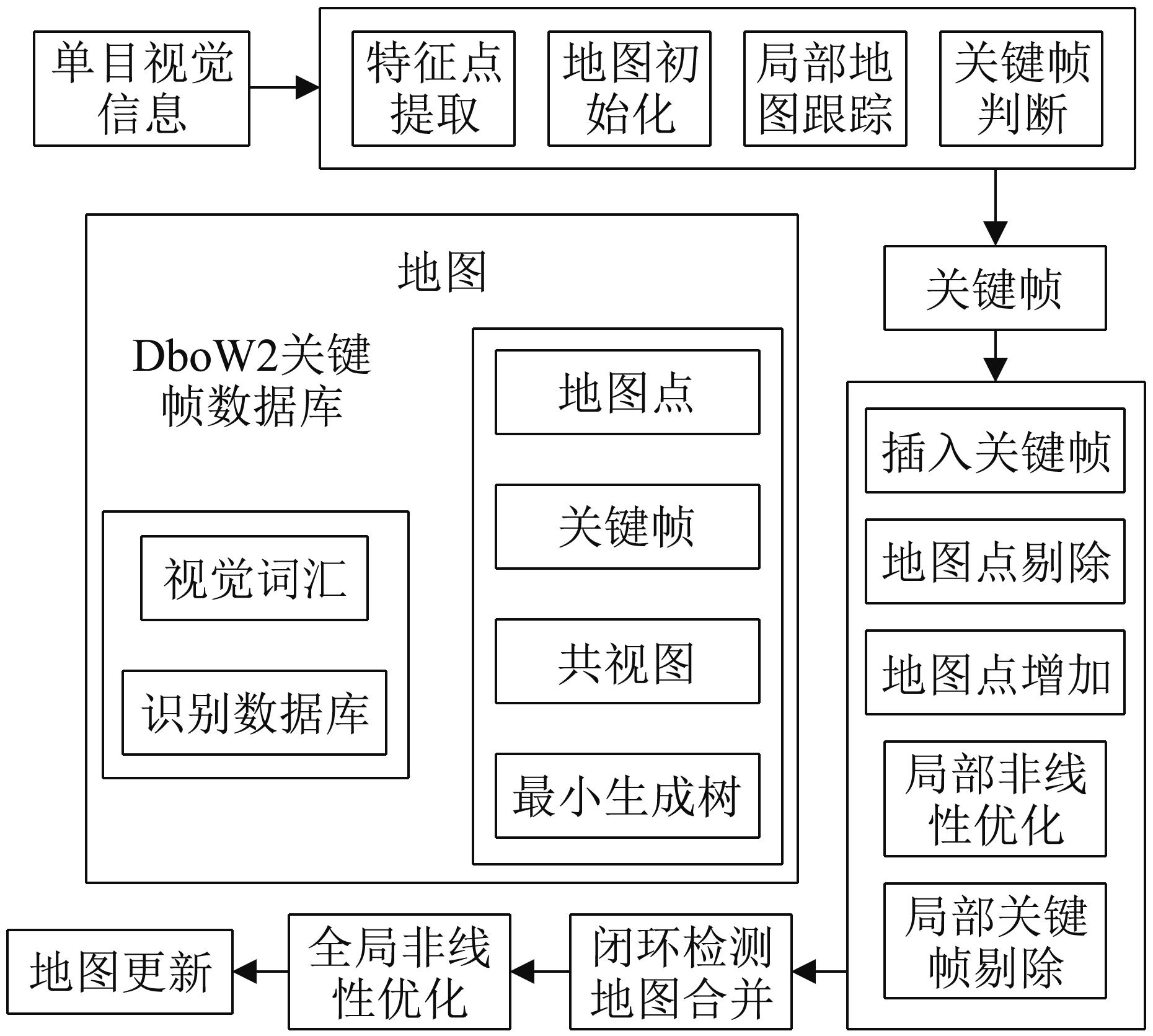

图2
改进的跟踪线程
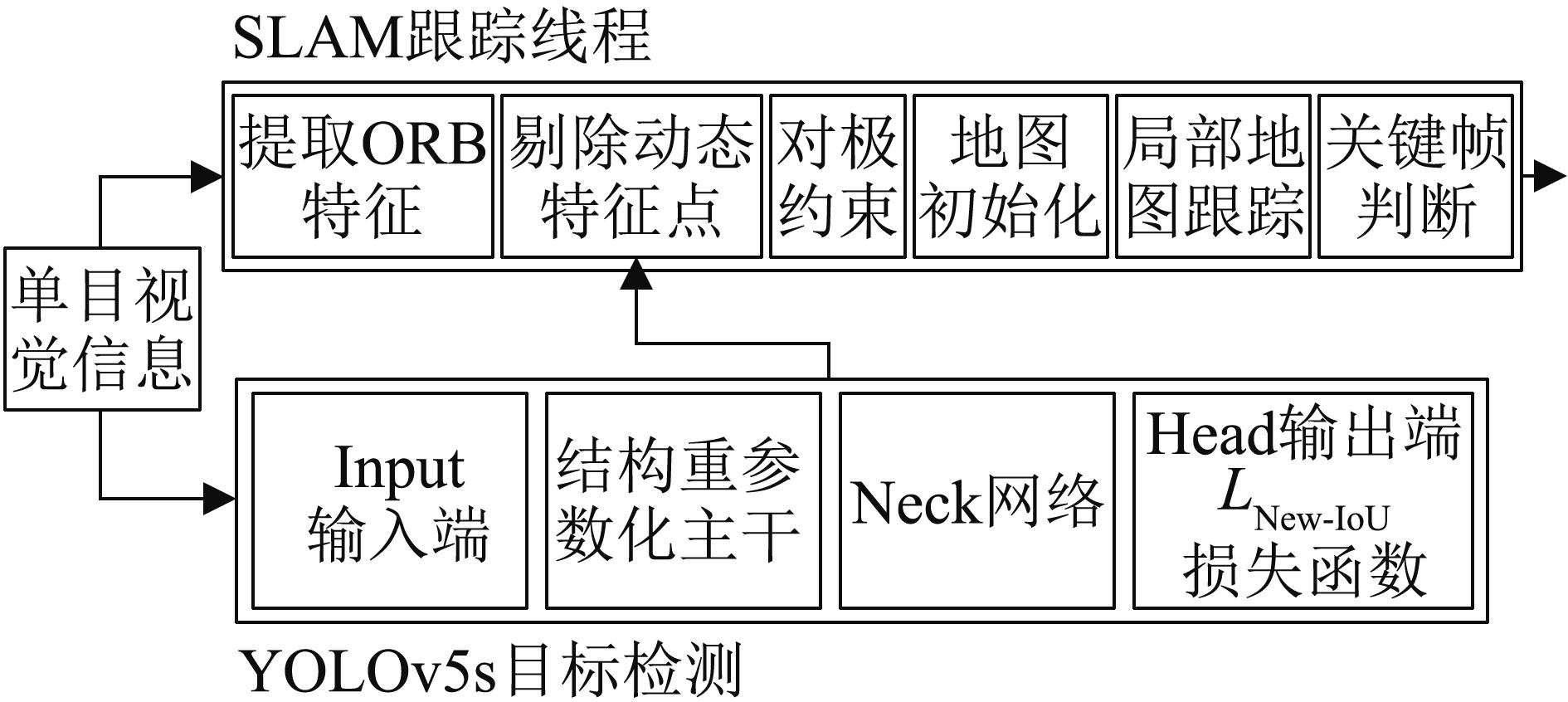
图3
对极约束的原理图
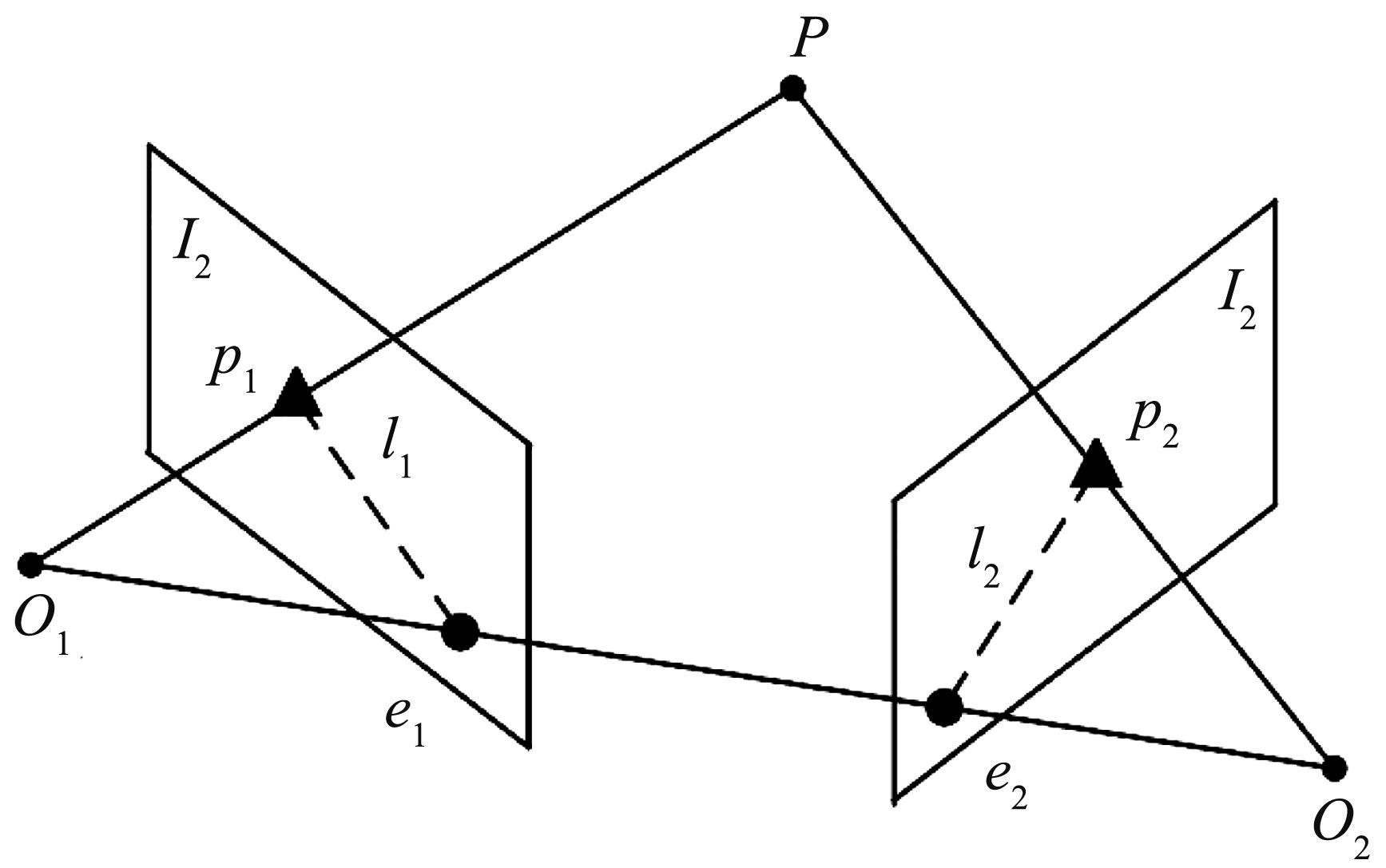

图4
动态目标对对极约束的干扰
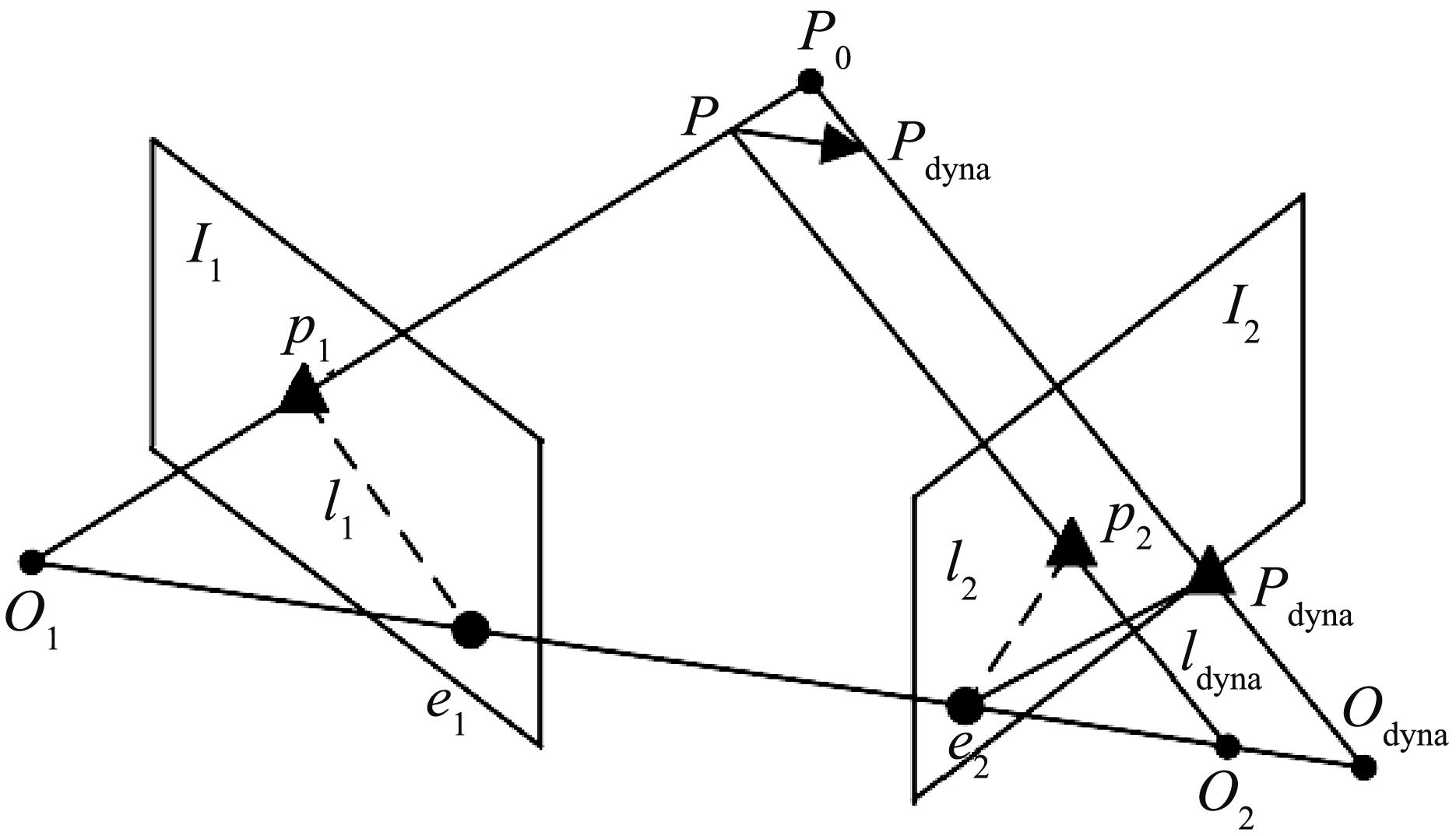

图5
网络结构
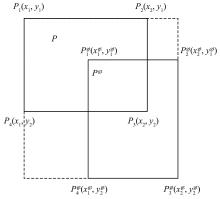
图6
距离对损失函数的影响
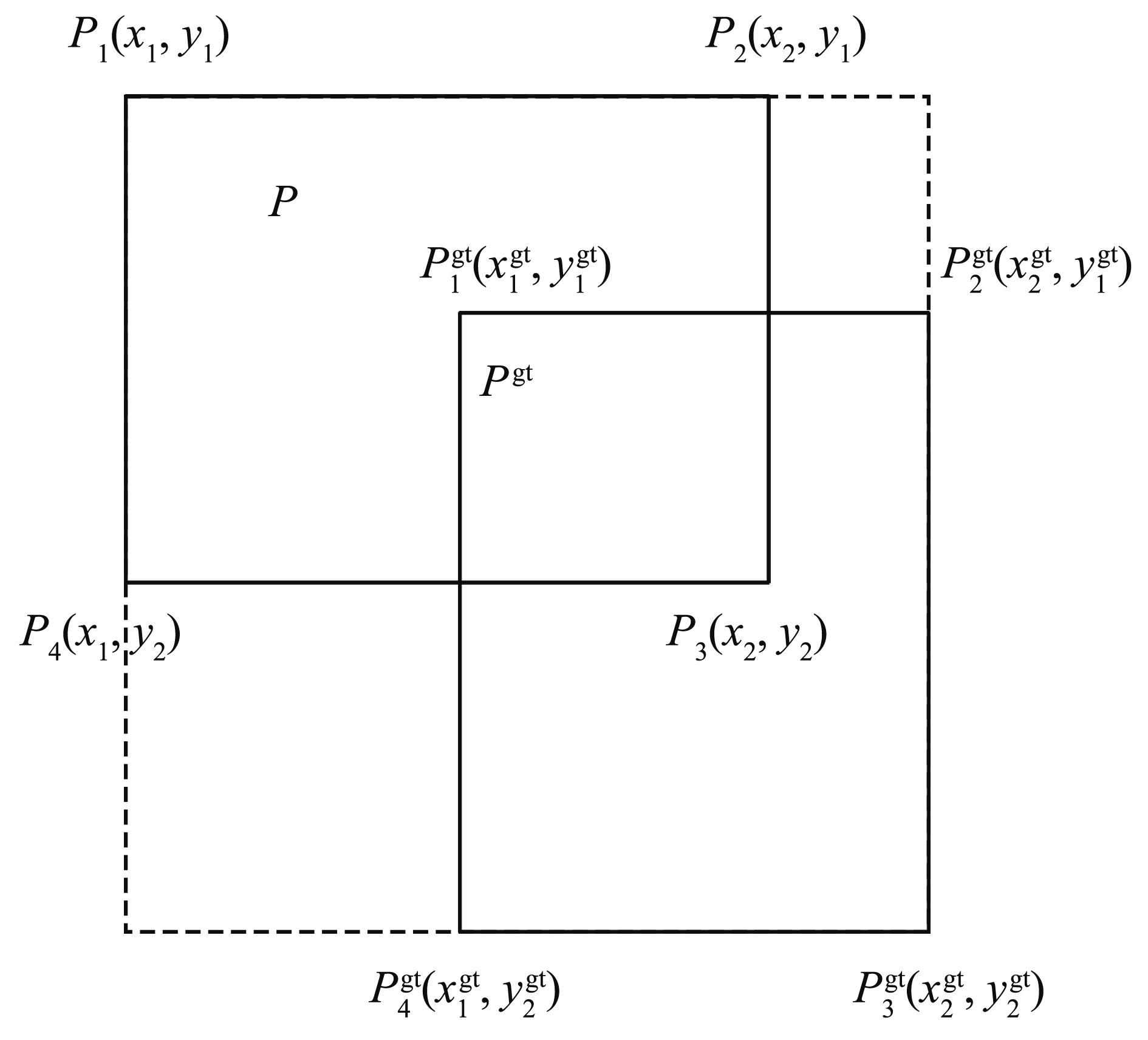
图7
角度对损失函数的影响
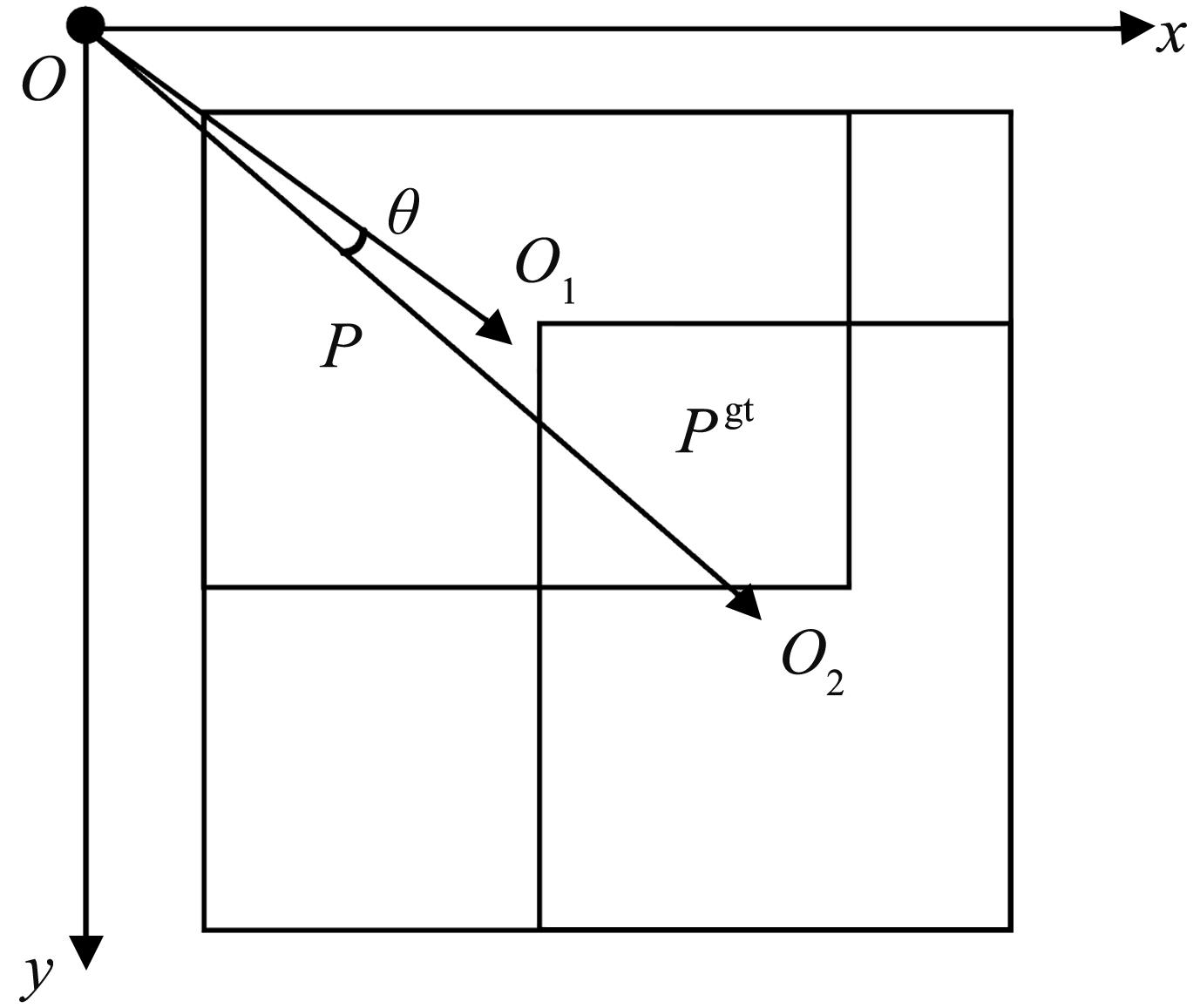
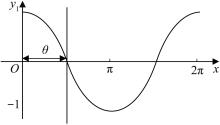
图8
余弦相似度取值范围
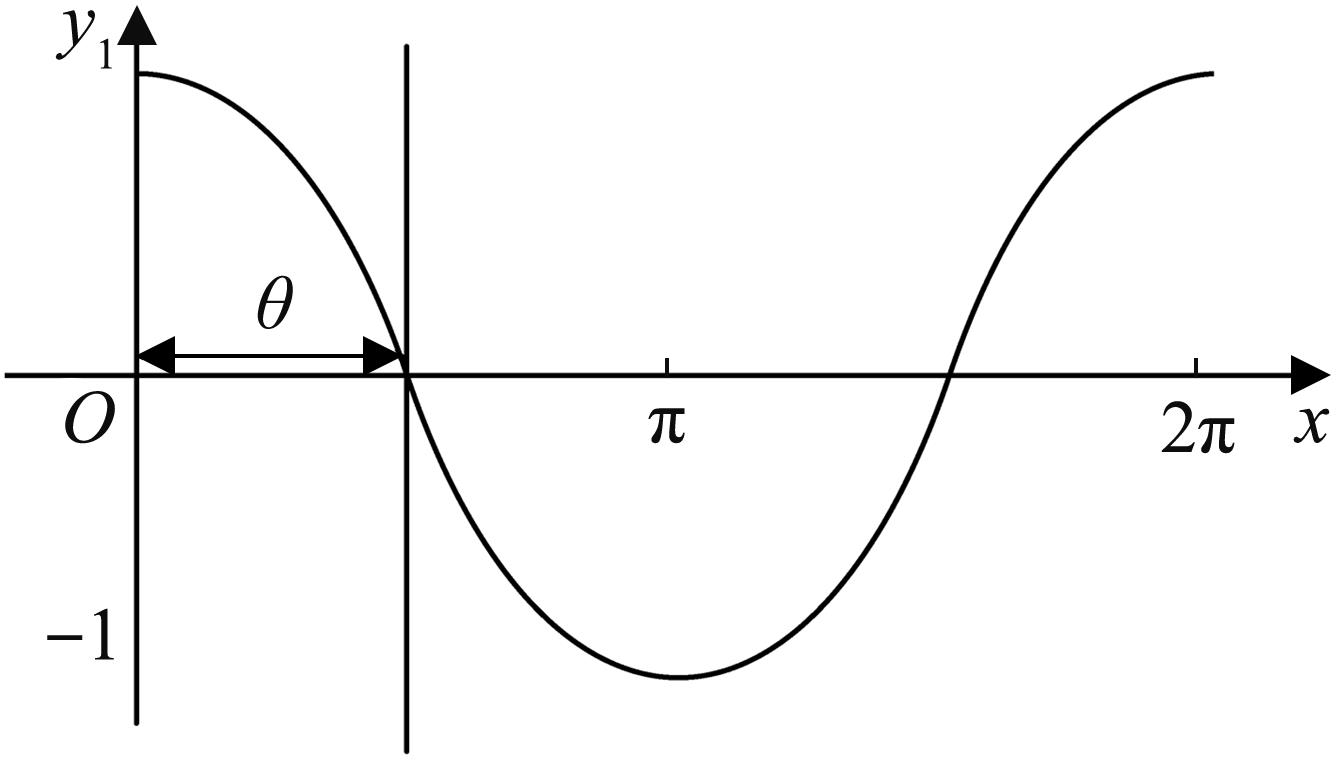
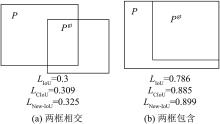
图9
预测框与真值框的位置
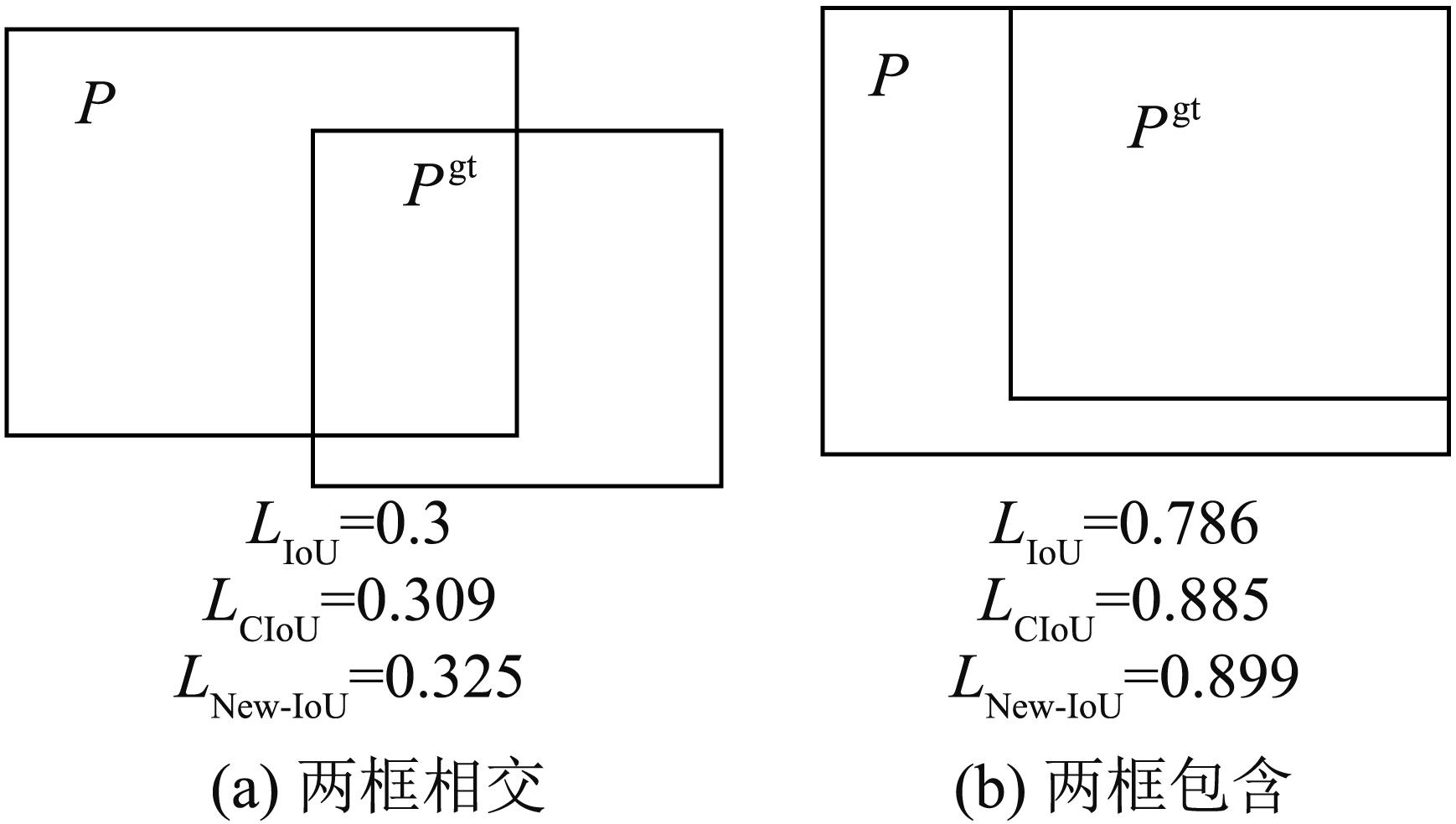

图10
YOLOv5s网络结构
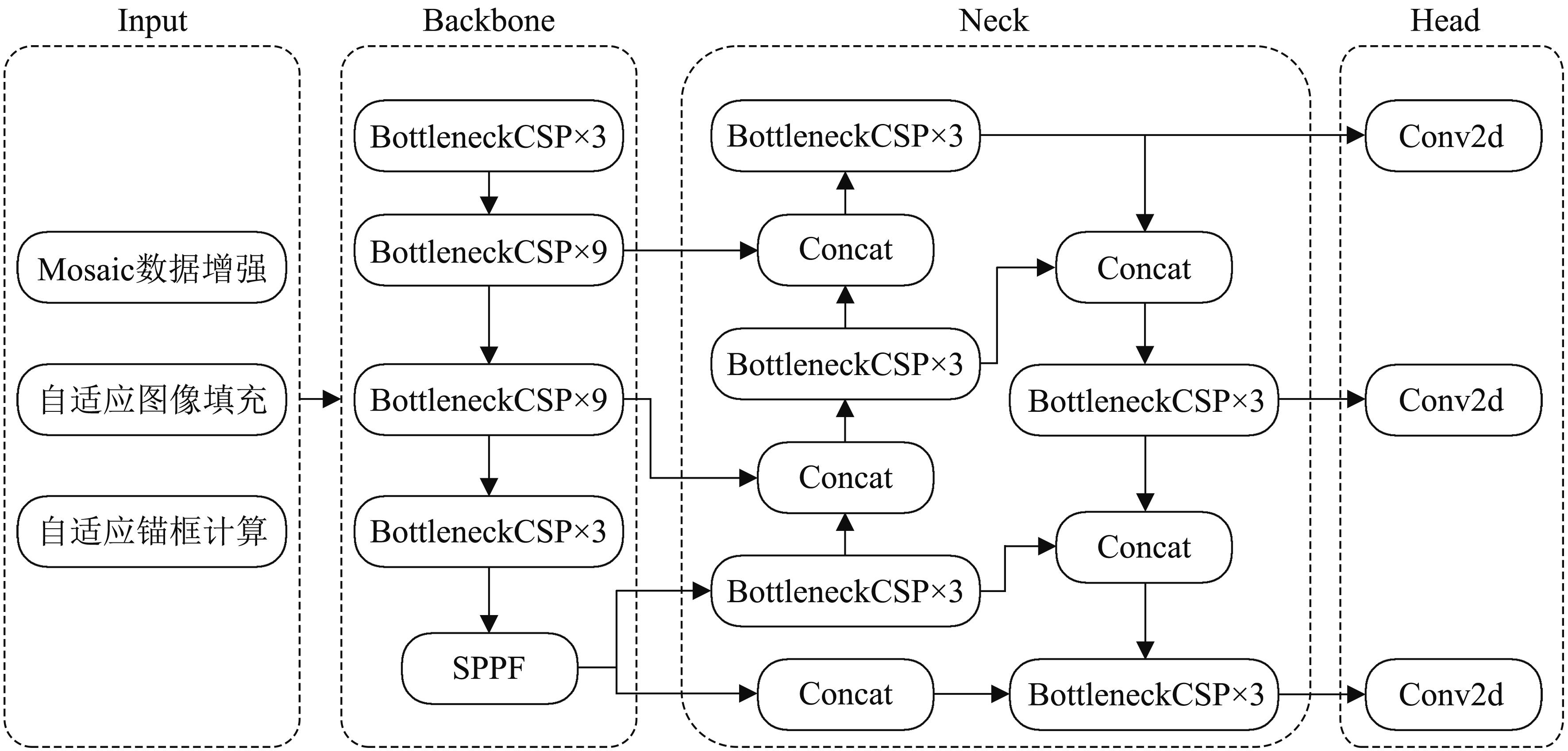
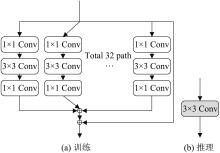
图11
改进后的BottleneckCSP模块
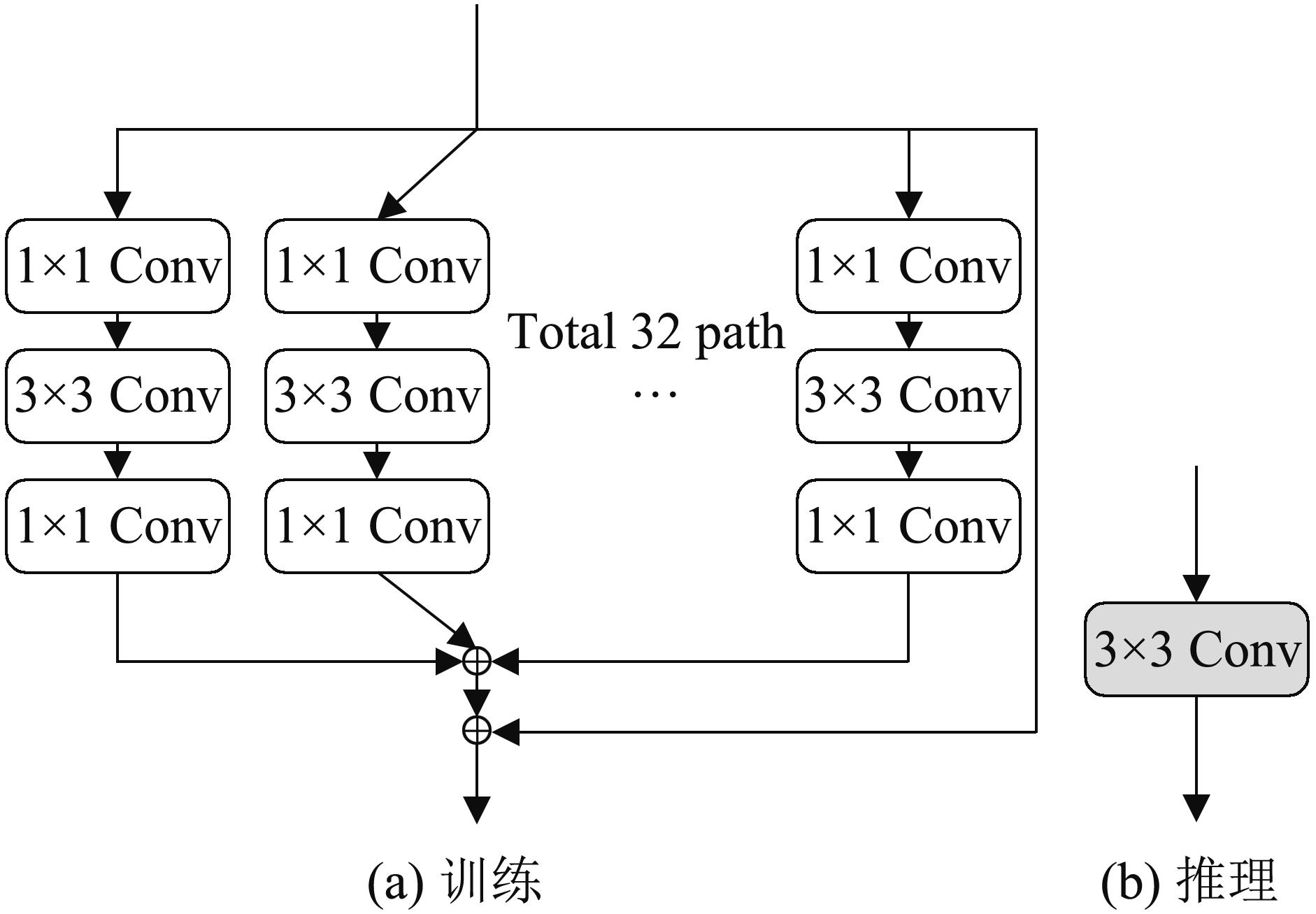
表1
训练结果
| 损失函数 | 准确率 | 召回率 | mAP@.5 | mAP@.5:.95 |
|---|---|---|---|---|
| LCIoU | 0.952 | 0.893 | 0.957 | 0.837 |
| LNew-IoU | 0.956 | 0.980 | 0.974 | 0.856 |
图12
训练集损失函数曲线
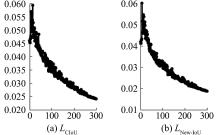
图13
验证集损失函数曲线
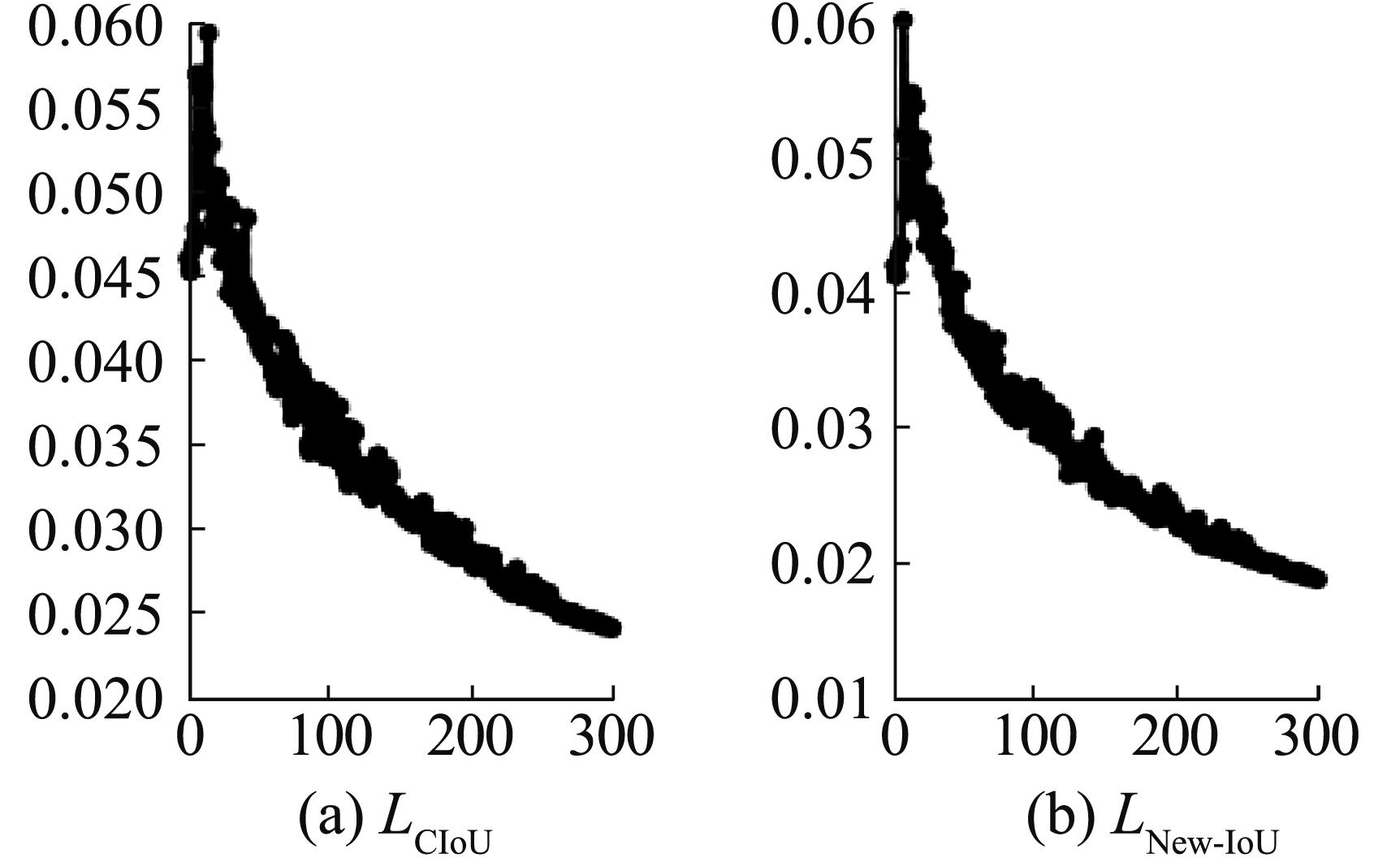
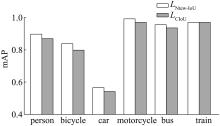
图14
不同算法的mAP对比
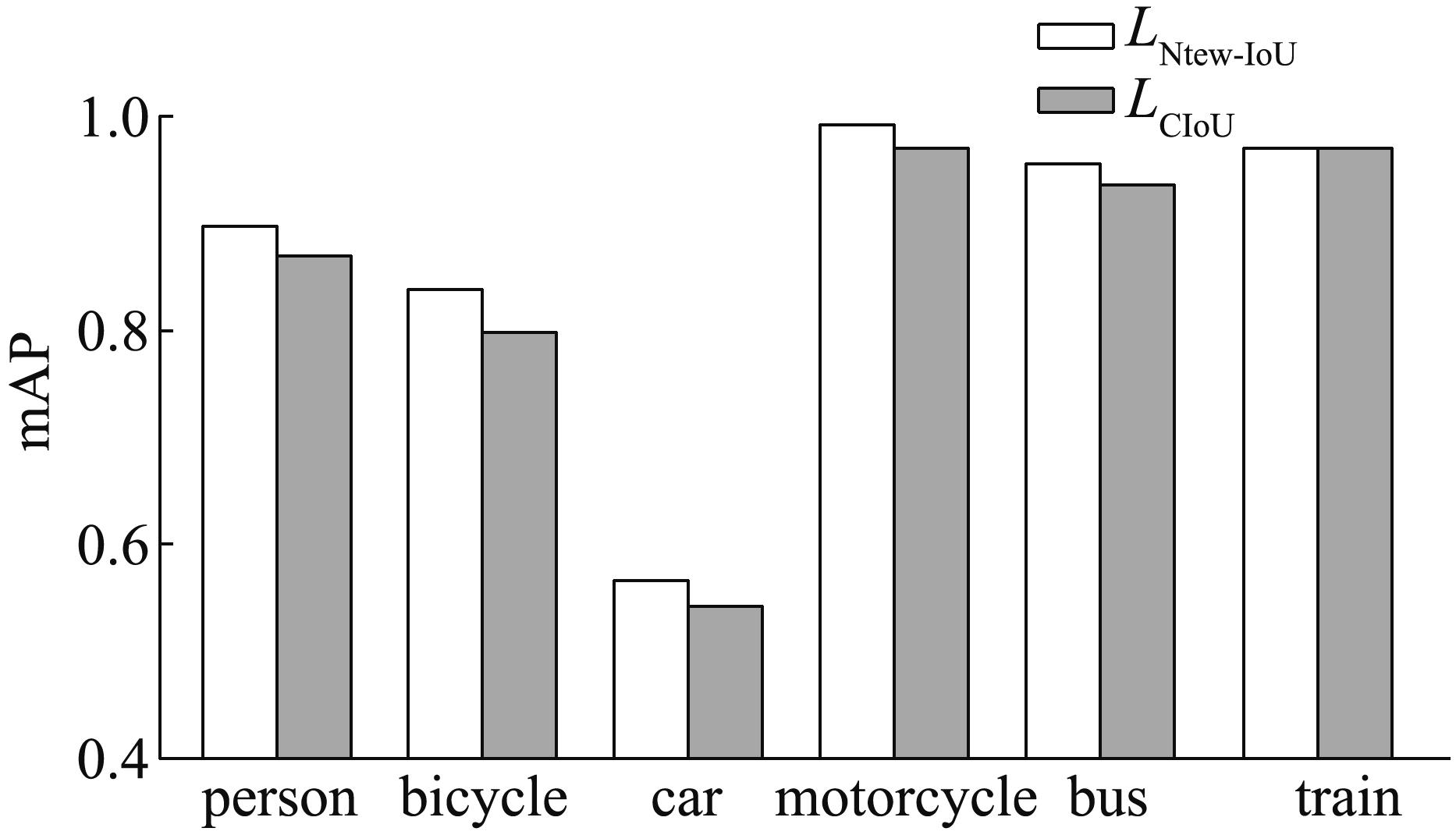
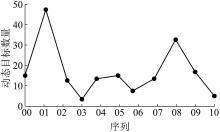
图15
KITTI数据集中动态目标数量统计
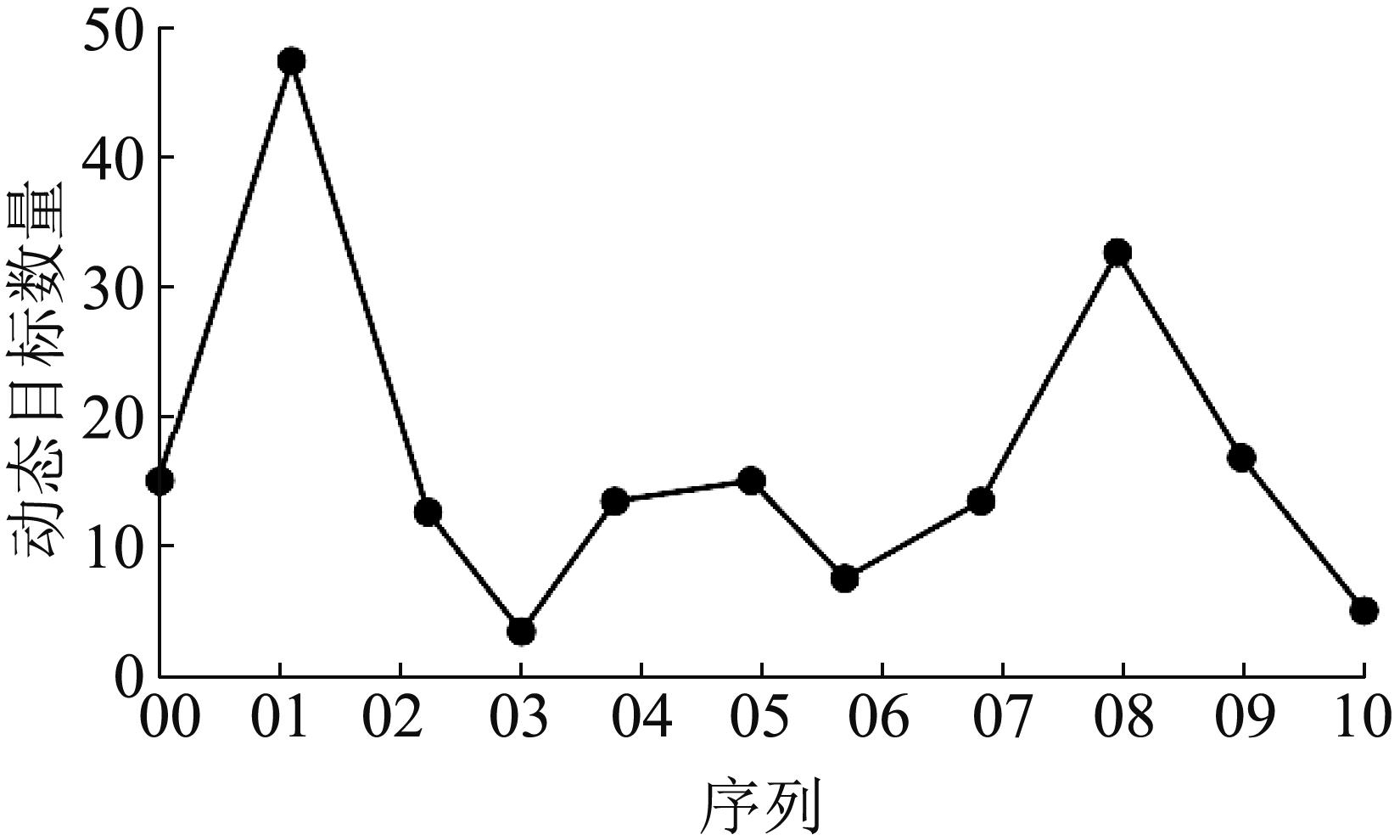

图16
对动态车辆的识别效果
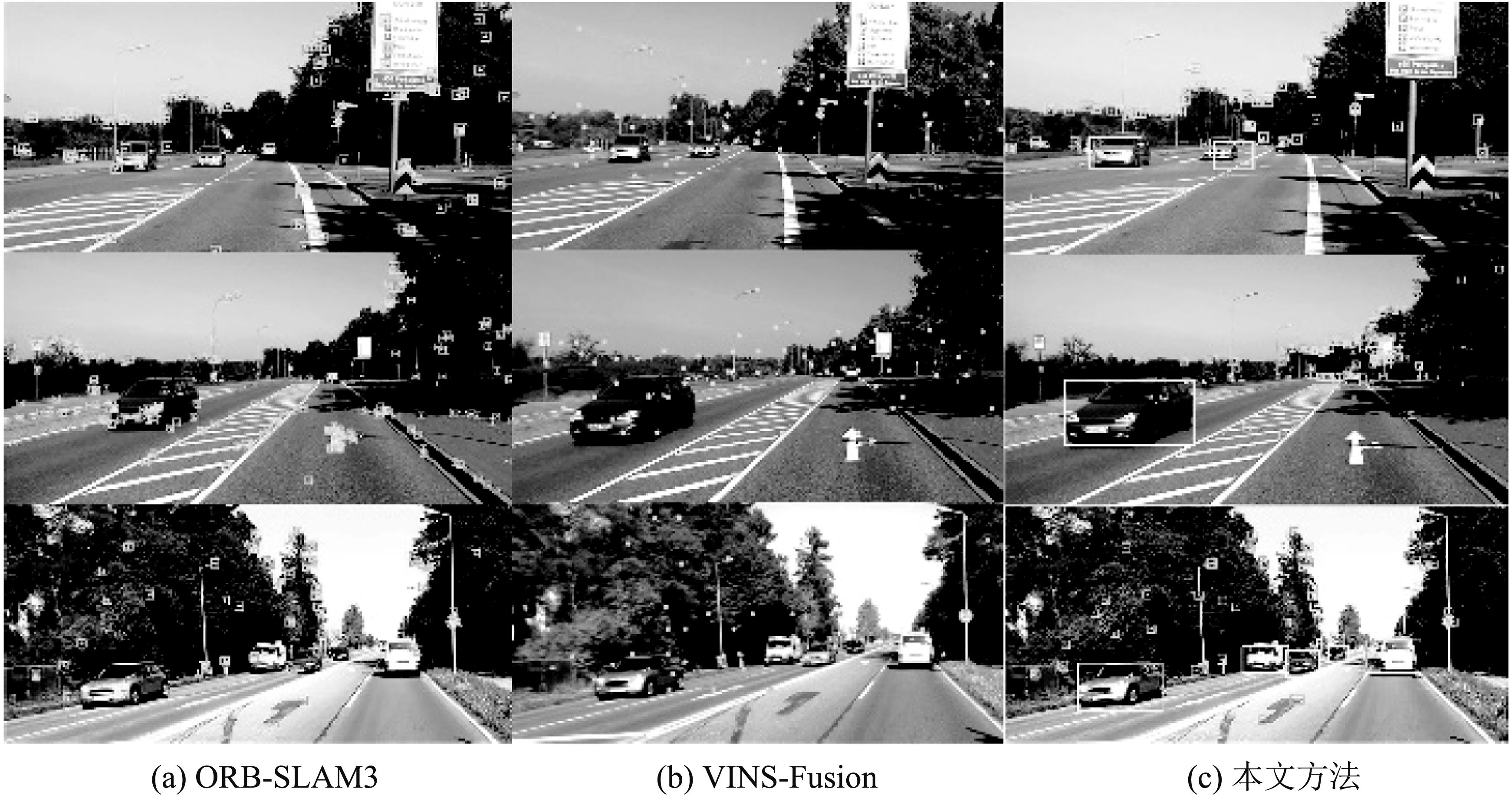

图17
对行人的识别效果
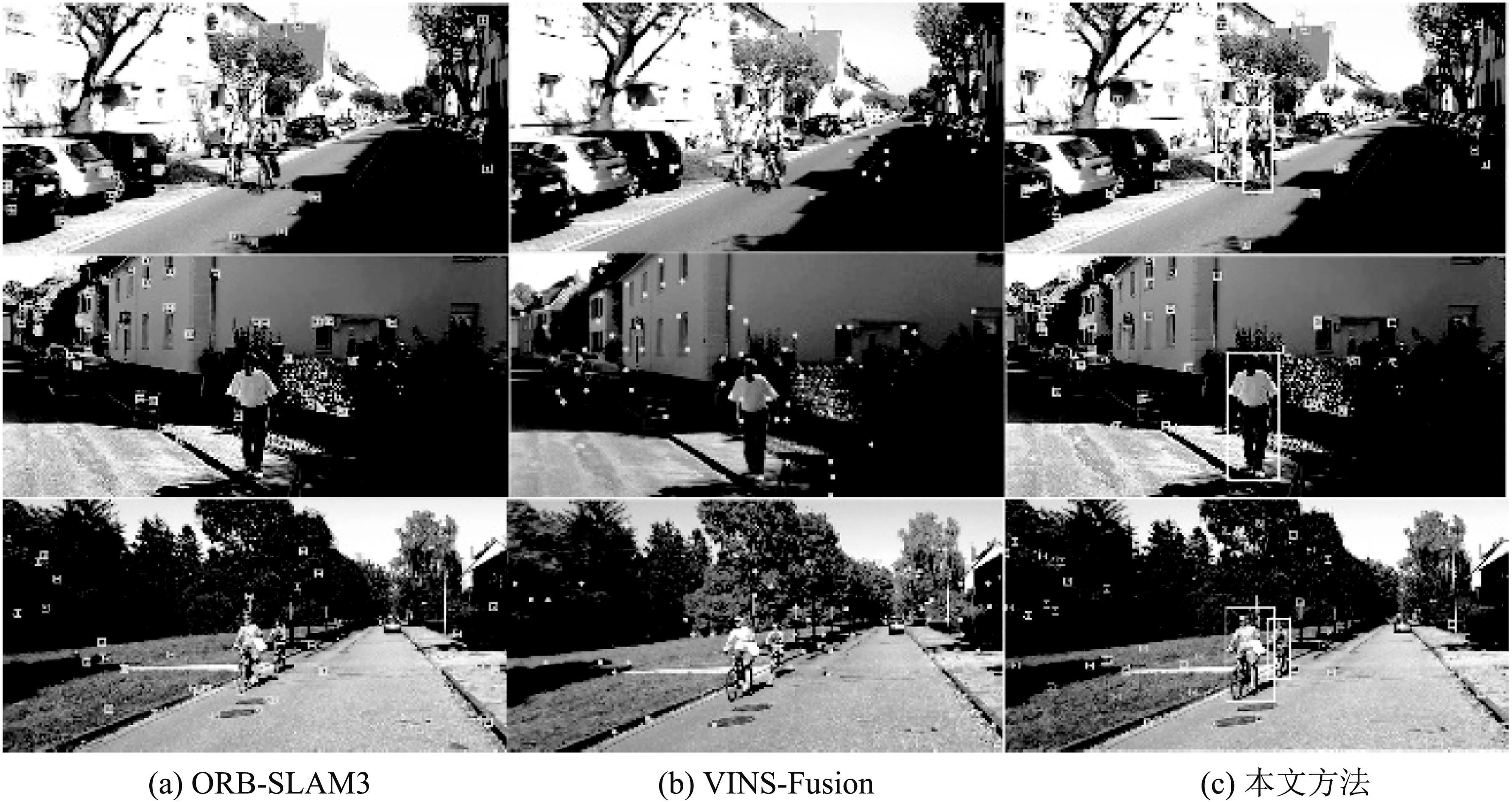
表2
绝对轨迹误差对比
| 序列 | 平均值 | 标准差 | 均方根误差 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM3 | 文献[ | 本文 | ORB-SLAM3 | 文献[ | 本文 | ORB-SLAM3 | 文献[ | 本文 | |
| 00 | 0.513 | 13.238 | 0.396 | 0.286 | 5.222 | 0.245 | 0.587 | 15.165 | 0.466 |
| 01 | ― | 6.505 | 2.021 | ― | 2.631 | 1.407 | ― | 7.017 | 2.462 |
| 02 | 0.735 | 9.155 | 0.727 | 0.535 | 6.015 | 0.618 | 0.907 | 10.594 | 0.954 |
| 03 | 0.042 | 0.865 | 0.025 | 0.042 | 0.267 | 0.019 | 0.059 | 0.906 | 0.032 |
| 04 | 0.043 | 0.247 | 0.006 | 0.022 | 0.126 | 0.003 | 0.048 | 0.277 | 0.007 |
| 05 | 0.164 | 5.997 | 0.185 | 0.056 | 3.093 | 0.075 | 0.173 | 6.748 | 0.200 |
| 06 | 0.513 | 3.157 | 0.434 | 0.286 | 1.786 | 0.259 | 0.587 | 3.627 | 0.505 |
| 07 | 0.229 | 1.353 | 0.175 | 0.114 | 1.515 | 0.101 | 0.256 | 2.484 | 0.212 |
| 08 | 4.770 | 4.913 | 3.758 | 3.743 | 3.432 | 2.723 | 6.063 | 5.993 | 4.641 |
| 09 | 0.608 | 4.866 | 0.287 | 0.570 | 3.953 | 0.126 | 0.834 | 6.269 | 0.314 |
| 10 | 0.293 | 3.158 | 0.379 | 0.295 | 1.778 | 0.331 | 0.474 | 3.753 | 0.503 |
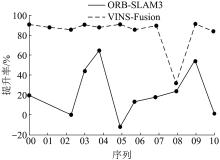
图18
绝对轨迹误差的提升率
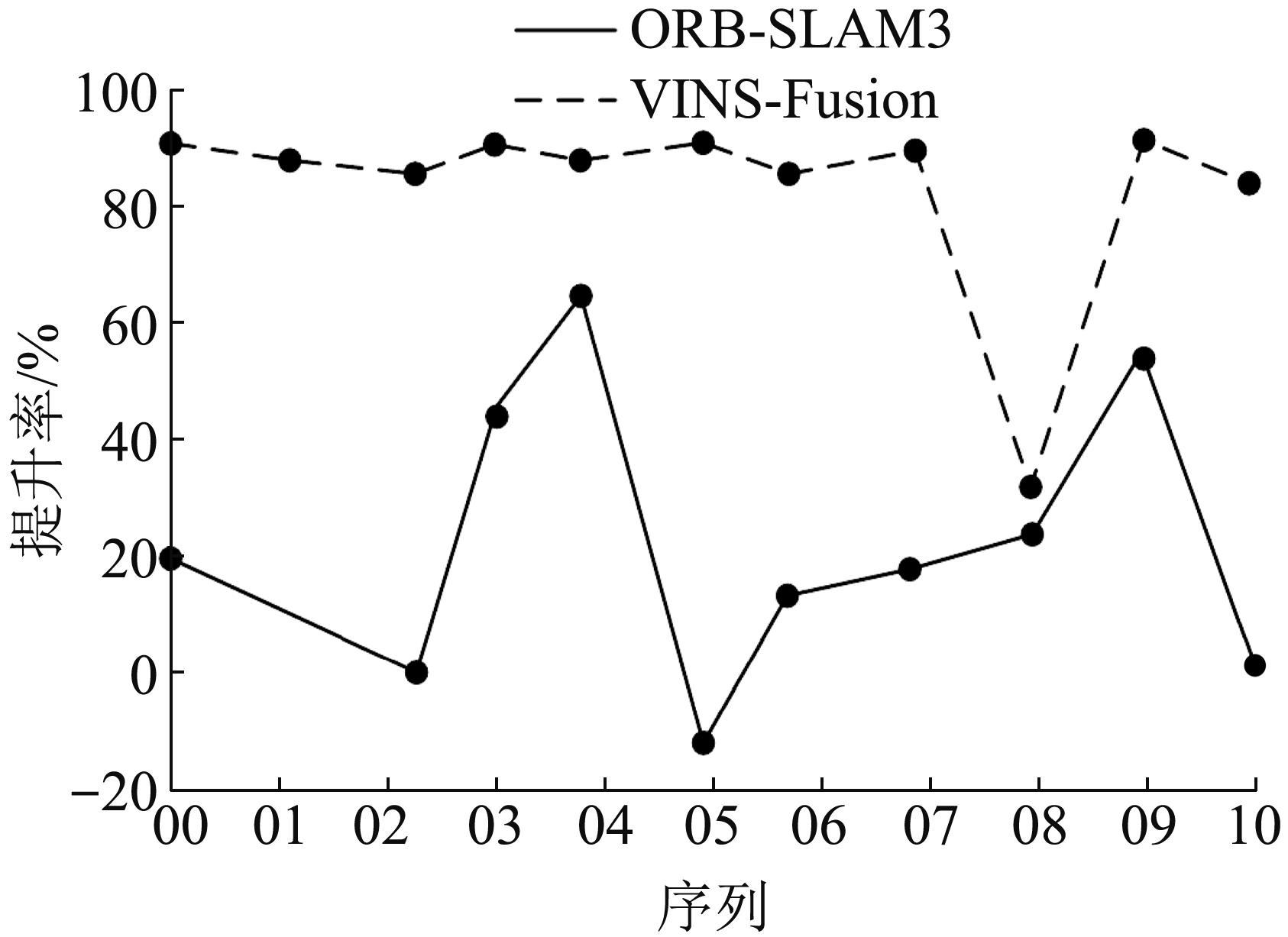

图19
02序列
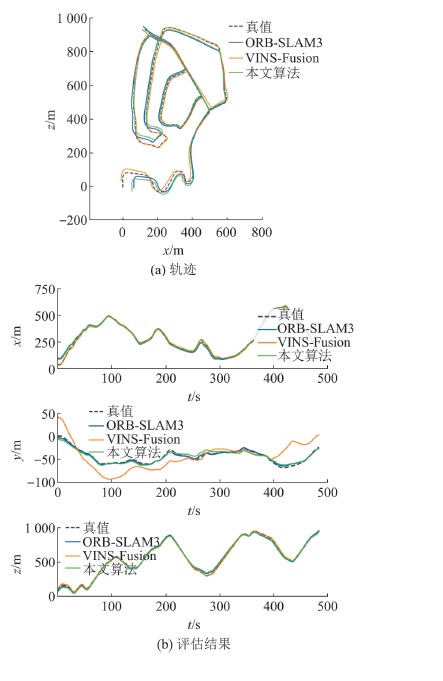

图20
06序列

图21
09序列
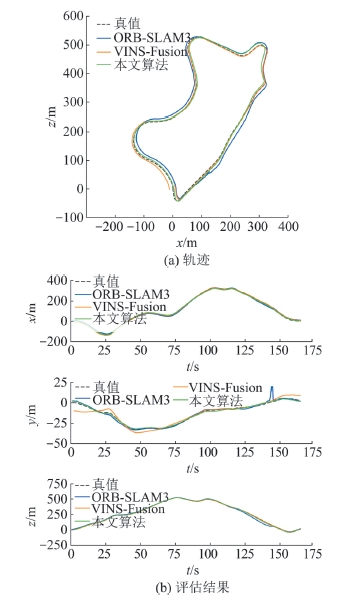
表3
相对轨迹误差对比
| 序列 | 均方根误差/% | 旋转误差/((˚)/m) | ||||
|---|---|---|---|---|---|---|
| ORB-SLAM3 | 文献[ | 本文 | ORB-SLAM3 | 文献[ | 本文 | |
| 00 | 1.334 | 1.791 | 1.468 | 0.767 | 0.216 | 0.474 |
| 01 | ― | 3.632 | 0.958 | ― | 0.064 | 2.352 |
| 02 | 0.692 | 1.207 | 0.166 | 0.272 | 0.158 | 0.302 |
| 03 | 0.591 | 1.174 | 0.403 | 0.107 | 0.058 | 0.169 |
| 04 | 0.669 | 0.617 | 0.552 | 0.147 | 0.046 | 0.14 |
| 05 | 1.022 | 0.988 | 1.347 | 0.328 | 0.077 | 0.497 |
| 06 | 2.601 | 0.797 | 1.607 | 0.229 | 0.057 | 0.193 |
| 07 | 1.122 | 0.812 | 1.126 | 0.191 | 0.075 | 0.182 |
| 08 | 10.855 | 1.479 | 6.392 | 0.184 | 0.072 | 0.19 |
| 09 | 4.113 | 1.612 | 1.041 | 0.282 | 0.067 | 0.246 |
| 10 | 2.022 | 1.318 | 1.504 | 0.183 | 0.083 | 0.186 |

图22
04序列
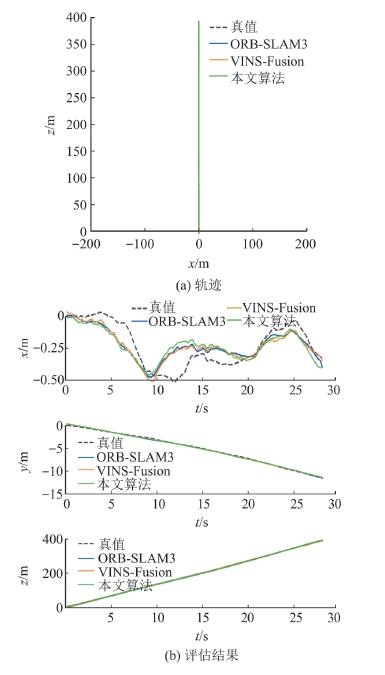

图23
07序列
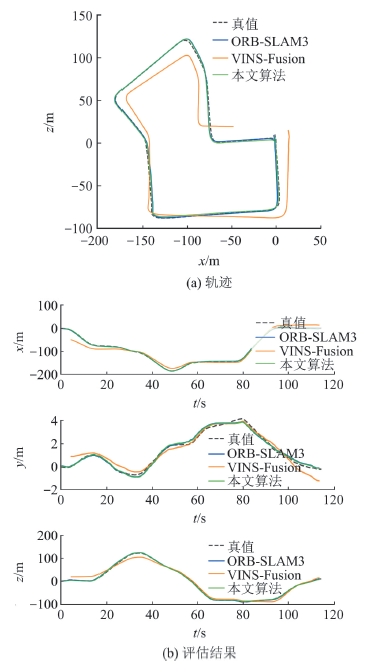
表4
Table 4目标检测优化对比 (m)
| 序列 | 平均值 | 标准差 | 均方根误差 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM3 | O+Y | 本文方法 | ORB-SLAM3 | O+Y | 本文方法 | ORB-SLAM3 | O+Y | 本文方法 | |
| 04 | 0.043 | 0.034 | 0.006 | 0.022 | 0.02 | 0.003 | 0.048 | 0.039 | 0.007 |
| 07 | 0.229 | 0.377 | 0.175 | 0.114 | 0.237 | 0.101 | 0.256 | 0.446 | 0.212 |
表5
跟踪时间对比 (ms)
| 序列 | ORB-SLAM3 | 本文算法 | ||
|---|---|---|---|---|
| 中位数 | 平均数 | 中位数 | 平均数 | |
| 平均值 | 24.5 | 26.6 | 29.8 | 30.9 |
| 03 | 24.7 | 26.6 | 28.9 | 30.2 |
| 06 | 24.4 | 26.5 | 29.9 | 31.4 |
| 07 | 24.5 | 26.7 | 30.5 | 31.1 |
表6
帧率对比 (帧/s)
| 序列 | ORB-SLAM3 | 本文算法 |
|---|---|---|
| 平均值 | 37.6 | 32.2 |
| 03 | 37.6 | 33.0 |
| 06 | 37.7 | 31.7 |
| 07 | 37.5 | 32.0 |
| 1 | Davison A J, Reid I D, Molton N D, et al. MonoSLAM: Real-time Single Camera SLAM[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6): 1052-1067. |
| 2 | 张良桥, 陈国良, 许晓东, 等. 一种用于图像特征提取的改进ORB-SLAM算法[J]. 测绘通报, 2019(3): 16-20. |
| Zhang Liangqiao, Chen Guoliang, Xu Xiaodong, et al. An Improved ORB-SLAM Algorithm for Feature Extraction[J]. Bulletin of Surveying and Mapping, 2019(3): 16-20. | |
| 3 | Zhou Lipu, Wang Shengze, Kaess M. DPLVO: Direct Point-line Monocular Visual Odometry[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 7113-7120. |
| 4 | Ban Xicheng, Wang Hongjian, Chen Tao, et al. Monocular Visual Odometry Based on Depth and Optical Flow Using Deep Learning[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-19. |
| 5 | Li Jinquan, Pei Ling, Zou Danping, et al. Attention-SLAM: A Visual Monocular SLAM Learning from Human Gaze[J]. IEEE Sensors Journal, 2021, 21(5): 6408-6420. |
| 6 | Lee Sehyung, Lim Jongwoo, Il Hong Suh. Progressive Feature Matching: Incremental Graph Construction and Optimization[J]. IEEE Transactions on Image Processing, 2020, 29: 6992-7005. |
| 7 | 胡立华, 左威健, 张继福. 采用逆近邻与影响空间的图像特征误匹配剔除方法[J]. 计算机辅助设计与图形学学报, 2022, 34(3): 449-458. |
| Hu Lihua, Zuo Weijian, Zhang Jifu. A Mismatch Elimination Method Based on Reverse Nearest Neighborhood and Influence Space[J]. Journal of Computer-Aided Design & Computer Graphics, 2022, 34(3): 449-458. | |
| 8 | 任彬, 宋海丽, 赵增旭, 等. 基于RANSAC的视觉里程计优化方法研究[J]. 仪器仪表学报, 2022, 43(6): 205-212. |
| Ren Bin, Song Haili, Zhao Zengxu, et al. Study on Optimization Method of Visual Odometry Based on RANSAC[J]. Chinese Journal of Scientific Instrument, 2022, 43(6): 205-212. | |
| 9 | 盛超, 潘树国, 赵涛, 等. 基于图像语义分割的动态场景下的单目SLAM算法[J]. 测绘通报, 2020(1): 40-44. |
| Sheng Chao, Pan Shuguo, Zhao Tao, et al. Monocular SLAM System in Dynamic Scenes Based on Image Semantic Segmentation[J]. Bulletin of Surveying and Mapping, 2020(1): 40-44. | |
| 10 | Chang Jianfang, Dong Na, Li Donghui. A Real-time Dynamic Object Segmentation Framework for SLAM System in Dynamic Scenes[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-9. |
| 11 | 刘瑞军, 王向上, 张晨, 等. 基于深度学习的视觉SLAM综述[J]. 系统仿真学报, 2020, 32(7): 1244-1256. |
| Liu Ruijun, Wang Xiangshang, Zhang Chen, et al. A Survey on Visual SLAM Based on Deep Learning[J]. Journal of System Simulation, 2020, 32(7): 1244-1256. | |
| 12 | 张翠文, 张长伦, 何强, 等. 目标检测中框回归损失函数的研究[J]. 计算机工程与应用, 2021, 57(20): 97-103. |
| Zhang Cuiwen, Zhang Changlun, He Qiang, et al. Research on Loss Function of Box Regression in Object Detection[J]. Computer Engineering and Applications, 2021, 57(20): 97-103. | |
| 13 | Rezatofighi H, Tsoi N, Gwak J Y, et al. Generalized Intersection over Union: A Metric and a Loss for Bounding Box Regression[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2019: 658-666. |
| 14 | Zheng Zhaohui, Wang Ping, Ren Dongwei, et al. Enhancing Geometric Factors in Model Learning and Inference for Object Detection and Instance Segmentation[J]. IEEE Transactions on Cybernetics, 2022, 52(8): 8574-8586. |
| 15 | Xue Hongtao, Wu Meng, Zhang Ziming, et al. Intelligent Diagnosis of Mechanical Faults of In-wheel Motor Based on Improved Artificial Hydrocarbon Networks[J]. ISA Transactions, 2022, 120: 360-371. |
| 16 | Zoph B, Vasudevan V, Shlens J, et al. Learning Transferable Architectures for Scalable Image Recognition[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE, 2018: 8697-8710. |
| 17 | Ding Xiaohan, Zhang Xiangyu, Ma Ningning, et al. RepVGG: Making VGG-style ConvNets Great Again[C]//2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2021: 13728-13737. |
| 18 | Campos Carlos, Elvira Richard, J Gómez Rodríguez Juan, et al. ORB-SLAM3: An Accurate Open-source Library for Visual, Visual-inertial, and Multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| 19 | 艾青林, 刘刚江, 徐巧宁. 动态环境下基于改进几何与运动约束的机器人RGB-D SLAM算法[J]. 机器人, 2021, 43(2): 167-176. |
| Ai Qinglin, Liu Gangjiang, Xu Qiaoning. An RGB-D SLAM Algorithm for Robot Based on the Improved Geometric and Motion Constraints in Dynamic Environment[J]. Robot, 2021, 43(2): 167-176. | |
| 20 | Shao Chunyan, Zhang Chi, Fang Zaojun, et al. A Deep Learning-based Semantic Filter for RANSAC-based Fundamental Matrix Calculation and the ORB-SLAM System[J]. IEEE Access, 2020, 8: 3212-3223. |
| 21 | João Carlos Virgolino Soares, Gattass Marcelo, Marco Antonio Meggiolaro. Visual SLAM in Human Populated Environments: Exploring the Trade-off between Accuracy and Speed of YOLO and Mask R-CNN[C]//2019 19th International Conference on Advanced Robotics (ICAR). Piscataway, NJ, USA: IEEE, 2019: 135-140. |
| 22 | Bescos Berta, Fácil José M, Civera Javier, et al. DynaSLAM: Tracking, Mapping, and Inpainting in Dynamic Scenes[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 4076-4083. |
| 23 | Geiger A, Lenz P, Stiller C, et al. Vision Meets Robotics: The KITTI Dataset[J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237. |
| 24 | Wang Ke, Cao Chuan, Ma Sai, et al. An Optimization-Based Multi-sensor Fusion Approach Towards Global Drift-free Motion Estimation[J]. IEEE Sensors Journal, 2021, 21(10): 12228-12235. |
| [1] | 彭莉峻, 苏庭琪, 刘沛津, 何林, 周协武, 张闽心. 融合人体关键点的实验室PPE规范穿戴检测方法[J]. 系统仿真学报, 2026, 38(5): 1365-1382. |
| [2] | 曹明伟, 王凤娜, 王子龙, 赵海峰. 基于显式特征匹配和缩放点积注意力的神经辐射场[J]. 系统仿真学报, 2026, 38(3): 572-583. |
| [3] | 李明煜, 林家泉. 基于YOLOv8-DF的轻量化驾驶员面部目标检测算法[J]. 系统仿真学报, 2025, 37(8): 2103-2114. |
| [4] | 刘子龙, 张磊. 自然环境下改进YOLOv5对小目标苹果的检测[J]. 系统仿真学报, 2025, 37(8): 2124-2138. |
| [5] | 杨路, 裴俊莹. 融合多尺度特征的航拍目标检测算法[J]. 系统仿真学报, 2025, 37(6): 1486-1498. |
| [6] | 李杰, 刘扬, 李良, 苏本淦, 魏佳隆, 周广达, 石艳敏, 赵振. 基于跨阶段双分支特征聚合的遥感小目标检测[J]. 系统仿真学报, 2025, 37(4): 1025-1040. |
| [7] | 姜丽梅, 陈信威. 动态场景下基于特征点筛选的视觉SLAM算法[J]. 系统仿真学报, 2025, 37(3): 753-762. |
| [8] | 伍枢珩, 刘永奎, 张霖, 肖莹莹, 王力翚. 基于改进YOLOv8的轻量级装配工件检测算法[J]. 系统仿真学报, 2025, 37(12): 3099-3111. |
| [9] | 姚万业, 庞泽伟, 孙沛杰, 王祝. 基于窗口化匹配估计的ORB-SLAM算法研究[J]. 系统仿真学报, 2024, 36(9): 2032-2042. |
| [10] | 王改华, 李柯鸿, 龙潜, 姚敬萱, 朱博伦, 周正书, 潘旭冉. 基于知识蒸馏的轻量化Transformer目标检测[J]. 系统仿真学报, 2024, 36(11): 2517-2527. |
| [11] | 徐忠锴, 刘艳玲, 盛晓娟, 汪超, 柯文俊. 基于改进YOLOv5的变电站典型缺陷自动检测算法[J]. 系统仿真学报, 2024, 36(11): 2604-2615. |
| [12] | 鲁斌, 王明晗, 孙洋, 杨振宇. 全局信息感知与局部特征融合的高效三维目标检测[J]. 系统仿真学报, 2024, 36(11): 2616-2630. |
| [13] | 杨哲, 崔颖函, 郭灵犀, 李嘉鑫, 吴旭生. 融合数据仿真与深度学习算法的飞行器残骸搜寻技术[J]. 系统仿真学报, 2024, 36(10): 2238-2245. |
| [14] | 苏彤, 王颖, 邓启扬, 李兆彬. 基于YOLOv5改进的雾天行人与车辆检测算法[J]. 系统仿真学报, 2024, 36(10): 2413-2422. |
| [15] | 董庆庆, 吴昊, 钱文华, 孔凤玲. 基于交叉细化和循环注意力的RGB-D显著性目标检测[J]. 系统仿真学报, 2023, 35(9): 1931-1947. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
