| [1] |
糜凯. 面向多种约束的工业机械臂避障运动规划方法研究[D]. 北京: 中国科学院大学, 2020.
|
| [2] |
陈伟, 白克强, 李孚洋, 等. 渐进式约束扩展的机械臂运动规划算法[J]. 计算机应用研究, 2020, 37(9): 2754-2757, 2761.
|
|
Chen Wei, Bai Keqiang, Li Fuyang, et al. Progressive Constrained Extended Manipulator Motion Planning Algorithm[J]. Application Research of Computers, 2020, 37(9): 2754-2757, 2761.
|
| [3] |
Kingston Z, Moll M, Kavraki L E. Sampling-based Methods for Motion Planning with Constraints[J]. Annual Review of Control, Robotics, and Autonomous Systems, 2018, 1: 159-185.
|
| [4] |
胡世军, 刘海亮, 王兵雷, 等. 基于定向探索树算法的四旋翼无人机路径规划[J]. 系统仿真学报, 2025, 37(2): 311-324.
|
|
Hu Shijun, Liu Hailiang, Wang Binglei, et al. Quadrotor UAV Path Planning Based on Rapidly-exploration Directional Tree Algorithm[J]. Journal of System Simulation, 2025, 37(2): 311-324.
|
| [5] |
刘文倩, 单梁, 王志强, 等. 机械臂的位姿分离求逆和改进RRT-connect算法研究[J]. 控制工程, 2023, 30(11): 2100-2107.
|
|
Liu Wenqian, Shan Liang, Wang Zhiqiang, et al. Research on Inversion Algorithm of Position and Attitude Separation and Improved RRT-connect Algorithm of Manipulator[J]. Control Engineering of China, 2023, 30(11): 2100-2107.
|
| [6] |
Karaman S, Walter M R, Perez Alejandro, et al. Anytime Motion Planning Using the RRT*[C]//Shanghai:2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011: 1478-1483.
|
| [7] |
Yavari M, Gupta K, Mehrandezh M. Lazy Steering RRT*: An Optimal Constrained Kinodynamic Neural Network Based Planner with No In-exploration Steering[C]//2019 19th International Conference on Advanced Robotics (ICAR). Piscataway: IEEE, 2019: 400-407.
|
| [8] |
霍韩淋, 邹湘军, 陈燕, 等. 基于视觉机器人障碍点云映射避障规划及仿真[J]. 系统仿真学报, 2024, 36(9): 2149-2158.
|
|
Huo Hanlin, Zou Xiangjun, Chen Yan, et al. Visual Robot Obstacle Avoidance Planning and Simulation Using Mapped Point Clouds[J]. Journal of System Simulation, 2024, 36(9): 2149-2158.
|
| [9] |
Ahmed Hussain Qureshi, Ayaz Yasar. Potential Functions Based Sampling Heuristic for Optimal Path Planning[J]. Autonomous Robots, 2016, 40(6): 1079-1093.
|
| [10] |
Bohlin R, Kavraki L E. Path Planning Using Lazy PRM[C]//Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings. Piscataway: IEEE, 2000: 521-528.
|
| [11] |
刘潇龙. 基于PRM算法和响应面法的线束路径规划方法[J]. 机械设计与制造工程, 2023, 52(5): 112-116.
|
|
Liu Xiaolong. Harness Path Planning Method Based on PRM Algorithm and Response Surface Method[J]. Machine Design and Manufacturing Engineering, 2023, 52(5): 112-116.
|
| [12] |
邹宇星, 李立君, 高自成. 基于改进PRM的采摘机器人机械臂避障路径规划[J]. 传感器与微系统, 2019, 38(1): 52-56.
|
|
Zou Yuxing, Li Lijun, Gao Zicheng. Obstacle Avoidance Path Planning for Harvesting Robot Arm Based on Improved PRM[J]. Transducer and Microsystem Technologies, 2019, 38(1): 52-56.
|
| [13] |
Osa Takayuki. Motion Planning by Learning the Solution Manifold in Trajectory Optimization[J]. The International Journal of Robotics Research, 2022, 41(3): 281-311.
|
| [14] |
Berenson D, Srinivasa S, Kuffner J. Task Space Regions: A Framework for Pose-constrained Manipulation Planning[J]. International Journal of Robotics Research, 2011, 30(12): 1435-1460.
|
| [15] |
Jaillet Léonard, Porta Josep M. Path Planning Under Kinematic Constraints by Rapidly Exploring Manifolds[J]. IEEE Transactions on Robotics, 2013, 29(1): 105-117.
|
| [16] |
李娟, 张韵, 陈涛. 改进RRT算法在未知三维环境下AUV目标搜索中的应用[J]. 智能系统学报, 2022, 17(2): 368-375.
|
|
Li Juan, Zhang Yun, Chen Tao. Application of the Improved RRT Algorithm to AUV Target Search in an Unknown 3D Environment[J]. CAAI Transactions on Intelligent Systems, 2022, 17(2): 368-375.
|
| [17] |
Kim Beobkyoon, Terry Taewoong Um, Suh Chansu, et al. Tangent Bundle RRT: A Randomized Algorithm for Constrained Motion Planning[J]. Robotica, 2016, 34(1): 202-225.
|
| [18] |
Panerati J, Zheng Hehui, Zhou Siqi, et al. Learning to Fly-a Gym Environment with PyBullet Physics for Reinforcement Learning of Multi-agent Quadcopter Control[C]//2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2021: 7512-7519.
|
| [19] |
Yang Xintong, Ji Ze, Wu Jing, et al. An Open-source Multi-goal Reinforcement Learning Environment for Robotic Manipulation with Pybullet[C]//Towards Autonomous Robotic Systems. Cham: Springer International Publishing, 2021: 14-24.
|
| [20] |
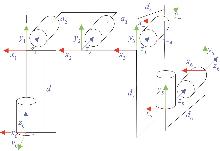
Kebria P M, Al-wais S, Abdi H, et al. Kinematic and Dynamic Modelling of UR5 Manipulator[C]//2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Piscataway: IEEE, 2016: 4229-4234.
|