| [1] |
国家市场监督管理总局, 国家标准化管理委员会. 智能网联汽车 组合驾驶辅助系统技术要求及试验方法 第1部分: 单车道行驶控制: [S]. 北京: 中国标准出版社, 2024: 8-9.
|
|
State Administration for Market Regulation, National Standardization Administration. Intelligent and Connected Vehicle-technical Requirements and Testing Methods for Combined Driver Assistance System-part 1: Single-lane Manoeuvre: [S]. Beijing: Standards Press of China, 2024: 8-9.
|
| [2] |
Xie Qiwei, Long Qian, Li Jianping, et al. Application of Intelligence Binocular Vision Sensor: Mobility Solutions for Automotive Perception System[J]. IEEE Sensors Journal, 2024, 24(5): 5578-5592.
|
| [3] |
Xie Qiwei, Hu Xiyuan, Ren Lei, et al. A Binocular Vision Application in IoT: Realtime Trustworthy Road Condition Detection System in Passable Area[J]. IEEE Transactions on Industrial Informatics, 2023, 19(1): 973-983.
|
| [4] |
王若萱, 吴建平, 徐辉. 自动驾驶汽车感知系统仿真的研究及应用综述[J]. 系统仿真学报, 2022, 34(12): 2507-2521.
|
|
Wang Ruoxuan, Wu Jianping, Xu Hui. Overview of Research and Application on Autonomous Vehicle Oriented Perception System Simulation[J]. Journal of System Simulation, 2022, 34(12): 2507-2521.
|
| [5] |
王檀彬, 陈无畏, 李进, 等. 多传感器融合的视觉导航智能车避障仿真研究[J]. 系统仿真学报, 2009, 21(4): 1015-1019.
|
|
Wang Tanbin, Chen Wuwei, Li Jin, et al. Simulations of Obstacle Avoidance for Intelligent Vehicles Based on Vision Navigation and Multi-sensor Fusion[J]. Journal of System Simulation, 2009, 21(4): 1015-1019.
|
| [6] |
叶继华, 时淑霞, 李汉曦, 等. 一种结合深度学习和随机森林的地平线检测方法[J]. 系统仿真学报, 2018, 30(7): 2507-2514.
|
|
Ye Jihua, Shi Shuxia, Li Hanxi, et al. A Horizon Detection Method Based on Deep Learning and Random Forest[J]. Journal of System Simulation, 2018, 30(7): 2507-2514.
|
| [7] |
蒋弘毅, 王永娟, 康锦煜. 目标检测模型及其优化方法综述[J]. 自动化学报, 2021, 47(6): 1232-1255.
|
|
Jiang Hongyi, Wang Yongjuan, Kang Jinyu. A Survey of Object Detection Models and Its Optimization Methods[J]. Acta Automatica Sinica, 2021, 47(6): 1232-1255.
|
| [8] |
罗会兰, 张云. 基于深度网络的图像语义分割综述[J]. 电子学报, 2019, 47(10): 2211-2220.
|
|
Luo Huilan, Zhang Yun. A Survey of Image Semantic Segmentation Based on Deep Network[J]. Acta Electronica Sinica, 2019, 47(10): 2211-2220.
|
| [9] |
Zhang Lin, Huang Junhao, Li Xiyuan, et al. Vision-based Parking-slot Detection: a DCNN-based Approach and a Large-scale Benchmark Dataset[J]. IEEE Transactions on Image Processing, 2018, 27(11): 5350-5364.
|
| [10] |
Zinelli Andrea, Musto Luigi, Pizzati Fabio. A Deep-learning Approach for Parking Slot Detection on Surround-view Images[C]//2019 IEEE Intelligent Vehicles Symposium (IV). Piscataway: IEEE, 2019: 683-688.
|
| [11] |
Zheng Ruitao, Lian Shikang, Liang Weihao, et al. Center Keypoint for Parking Slot Detection with Self-calibrated Convolutions Network[C]//2022 17th International Conference on Control, Automation, Robotics and Vision (ICARCV). Piscataway: IEEE, 2022: 305-310.
|
| [12] |
张宝军, 王钊璇, 李孰非. 基于改进卷积神经网络的车位角检测算法研究[J]. 传感器与微系统, 2023, 42(6): 62-65, 69.
|
|
Zhang Baojun, Wang Zhaoxuan, Li Shufei. Research on Parking Angle Detection Algorithm Based on Improved CNN[J]. Transducer and Microsystem Technologies, 2023, 42(6): 62-65, 69.
|
| [13] |
Jae Kyu Suhr, Gi Jung Ho. End-to-end Trainable One-stage Parking Slot Detection Integrating Global and Local Information[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(5): 4570-4582.
|
| [14] |
Wang Yinan, Guan Yingzhou, Cao Rongchuan. DetPS: A Fully Convolutional End-to-end Parking Slot Detector[C]//2022 IEEE 17th Conference on Industrial Electronics and Applications (ICIEA). Piscataway: IEEE, 2022: 1051-1056.
|
| [15] |
Yu Zhuoping, Gao Zhong, Chen Hansheng, et al. SPFCN: Select and Prune the Fully Convolutional Networks for Real-time Parking Slot Detection[C]//2020 IEEE Intelligent Vehicles Symposium (IV). Piscataway: IEEE, 2020: 445-450.
|
| [16] |
Jang Chulhoon, Sunwoo Myoungho. Semantic Segmentation-based Parking Space Detection with Standalone Around View Monitoring System[J]. Machine Vision and Applications, 2019, 30(2): 309-319.
|
| [17] |
Jiang Wei, Wu Yan, Guan Linting, et al. DFNet: Semantic Segmentation on Panoramic Images with Dynamic Loss Weights and Residual Fusion Block[C]//2019 International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2019: 5887-5892.
|
| [18] |
Jian Dehui, Lin Changhong. Vision-based Parking Slot Detection Based on End-to-end Semantic Segmentation Training[C]//2020 IEEE International Conference on Consumer Electronics (ICCE). Piscataway: IEEE, 2020: 1-4.
|
| [19] |
Lai Cong, Yang Qingyu, Guo Yixin, et al. Semantic Segmentation of Panoramic Images for Real-time Parking Slot Detection[J]. Remote Sensing, 2022, 14(16): 3874.
|
| [20] |
Huang Junhao, Zhang Lin, Shen Ying, et al. DMPR-PS: A Novel Approach for Parking-slot Detection Using Directional Marking-point Regression[C]//2019 IEEE International Conference on Multimedia and Expo (ICME). Piscataway: IEEE, 2019: 212-217.
|
| [21] |
Min Chen, Xu Jiaolong, Xiao Liang, et al. Attentional Graph Neural Network for Parking-slot Detection[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 3445-3450.
|
| [22] |
Ko Yeongmin, Lee Younkwan, Azam Shoaib, et al. Key Points Estimation and Point Instance Segmentation Approach for Lane Detection[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 8949-8958.
|
| [23] |
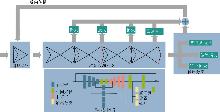
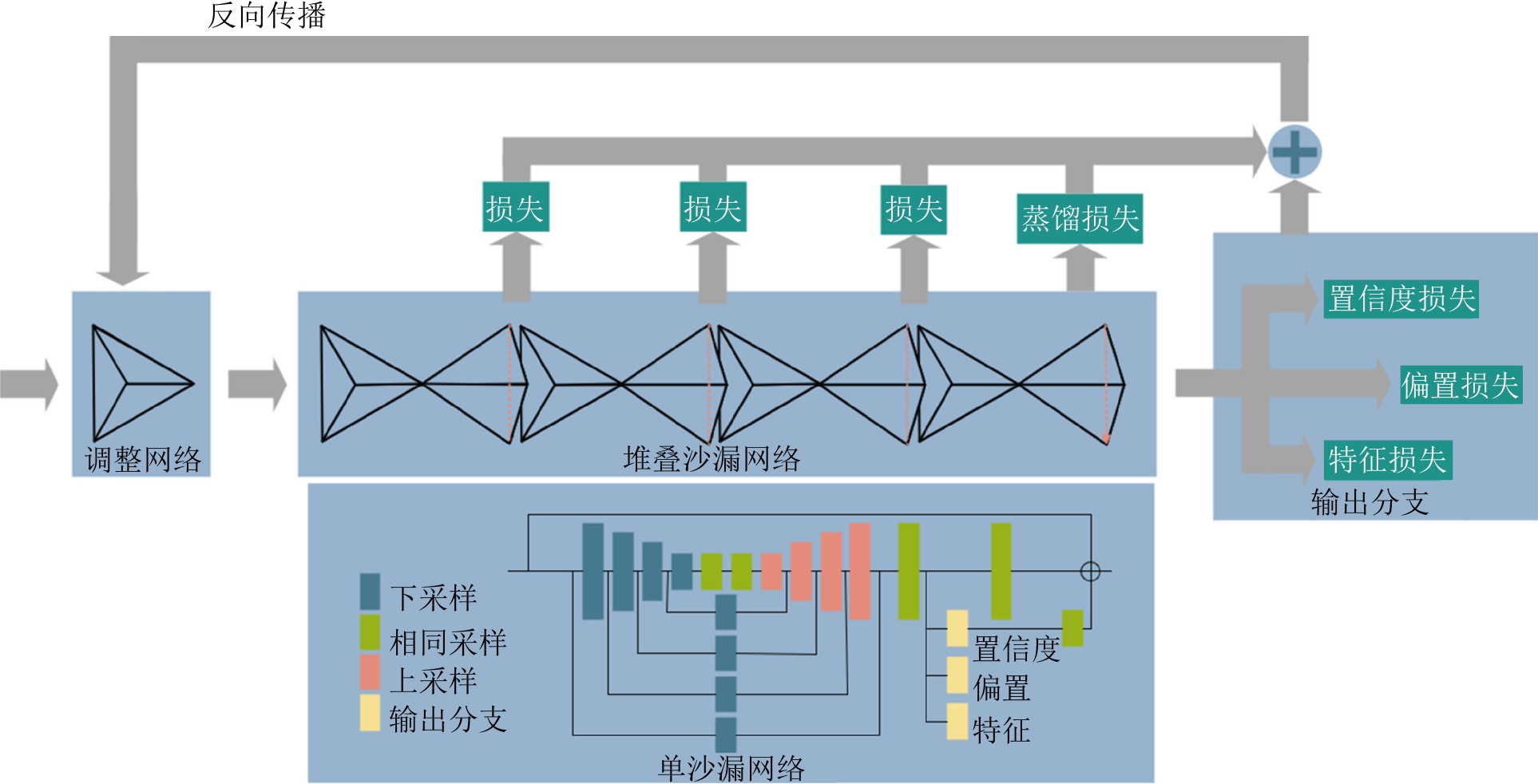
Newell A, Yang Kaiyu, Deng Jia. Stacked Hourglass Networks for Human Pose Estimation[C]//Computer Vision – ECCV 2016. Cham: Springer International Publishing, 2016: 483-499.
|
| [24] |
Zheng Tu, Fang Hao, Zhang Yi, et al. RESA: Recurrent Feature-shift Aggregator for Lane Detection[C]//Proceedings of the AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2021: 3547-3554.
|
| [25] |
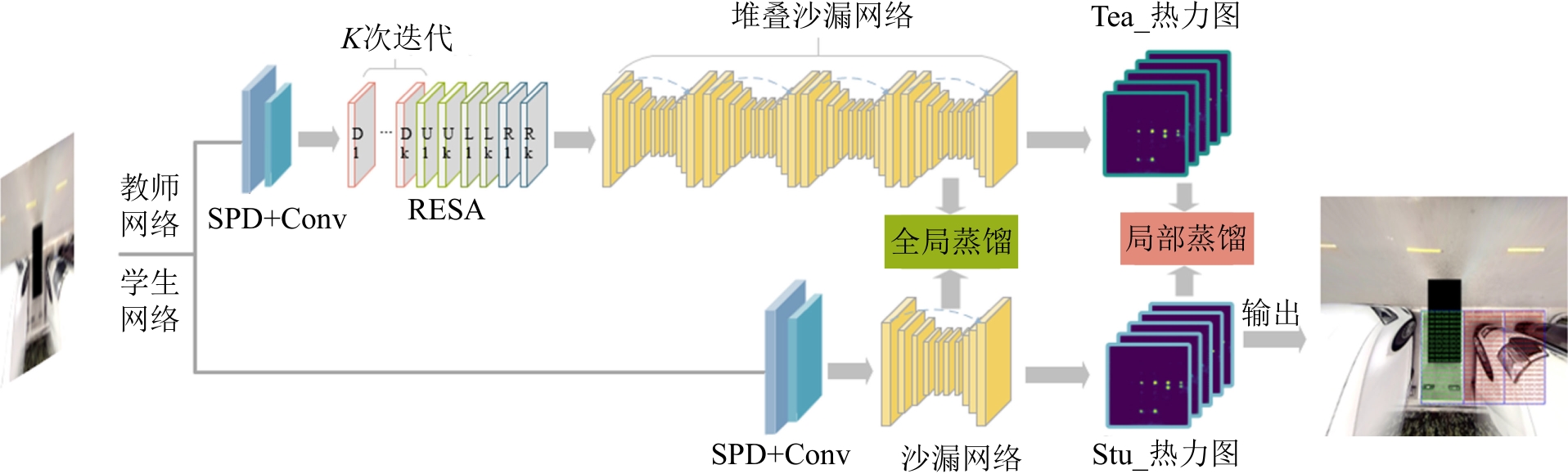
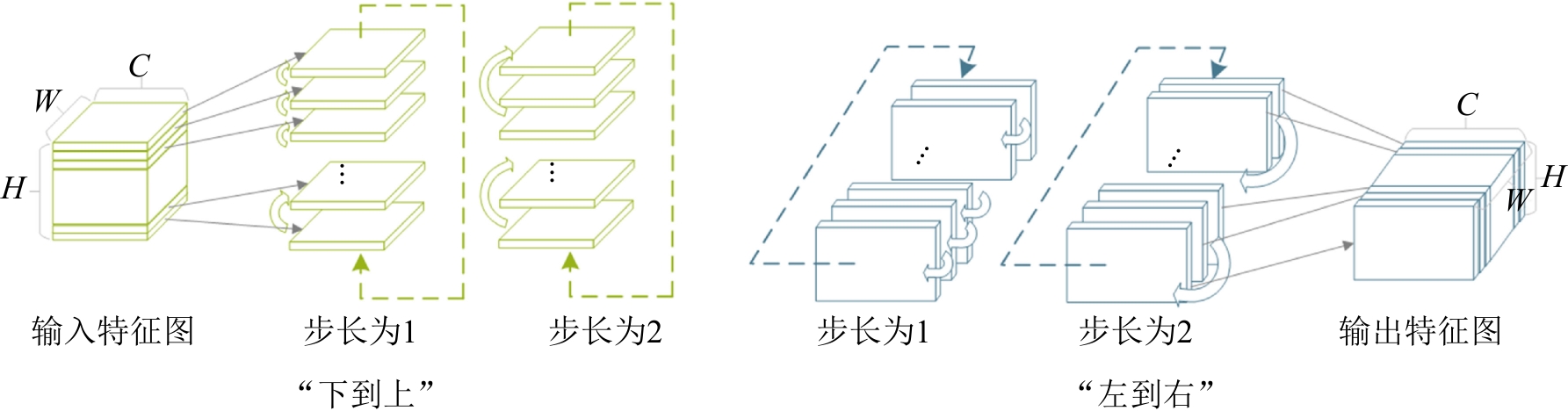
Sunkara R, Luo Tie. No More Strided Convolutions or Pooling: A New CNN Building Block for Low-resolution Images and Small Objects[C]//Proceedings of the Joint European Conference on Machine Learning and Knowledge Discovery in Databases. Cham: Springer Nature Switzerland, 2023: 443-459.
|
| [26] |
Yang Zhendong, Li Zhe, Jiang Xiaohu, et al. Focal and Global Knowledge Distillation for Detectors[C]//2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2022: 4633-4642.
|
| [27] |
Hu Jie, Shen Li, Sun Gang. Squeeze-and-Excitation Networks[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7132-7141.
|
| [28] |
Lin T Y, Goyal P, Girshick R, et al. Focal Loss for Dense Object Detection[C]//2017 IEEE International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2017: 2999-3007.
|
| [29] |
Goutte Cyril, Gaussier Eric. A Probabilistic Interpretation of Precision, Recall and F-score, with Implication for Evaluation[C]//Advances in Information Retrieval. Berlin, Heidelberg: Springer Berlin Heidelberg, 2005: 345-359.
|