| 1 |
毛德乾, 高珊珊, 张晨昊, 等. 去光源影响的加权导向滤波图像去雾算法[J]. 计算机辅助设计与图形学学报, 2022, 34(2): 217-231.
|
|
Mao Deqian, Gao Shanshan, Zhang Chenhao, et al. Image Dehazing via Weighted Guided Filtering with Removing Lighting Effects[J]. Journal of Computer-Aided Design & Computer Graphics, 2022, 34(2): 217-231.
|
| 2 |
王若萱, 吴建平, 徐辉. 自动驾驶汽车感知系统仿真的研究及应用综述[J]. 系统仿真学报, 2022, 34(12): 2507-2521.
|
|
Wang Ruoxuan, Wu Jianping, Xu Hui. Overview of Research and Application on Autonomous Vehicle Oriented Perception System Simulation[J]. Journal of System Simulation, 2022, 34(12): 2507-2521.
|
| 3 |
张稀柳, 张晓玲, 何敏军. 基于改进YOLOX-s的车辆检测方法研究[J]. 系统仿真学报, 2024, 36(2): 487-496.
|
|
Zhang Xiliu, Zhang Xiaoling, He Minjun. Research on Vehicle Detection Method Based on Improved YOLOX-s[J]. Journal of System Simulation, 2024, 36(2): 487-496.
|
| 4 |
董丽丽, 丁畅, 许文海. 基于直方图均衡化图像增强的两种改进方法[J]. 电子学报, 2018, 46(10): 2367-2375.
|
|
Dong Lili, Ding Chang, Xu Wenhai. Two Improved Methods Based on Histogram Equalization for Image Enhancement[J]. Acta Electronica Sinica, 2018, 46(10): 2367-2375.
|
| 5 |
Suresh Chandra Raikwar, Tapaswi Shashikala, Chakraborty Soumendu. Bounding Function for Fast Computation of Transmission in Single Image Dehazing[J]. Multimedia Tools and Applications, 2022, 81(4): 5349-5372.
|
| 6 |
Ju Mingye, Ding Can, Ren Wenqi, et al. IDE: Image Dehazing and Exposure Using an Enhanced Atmospheric Scattering Model[J]. IEEE Transactions on Image Processing, 2021, 30: 2180-2192.
|
| 7 |
Narasimhan S G, Nayar S K. Vision and the Atmosphere[J]. International Journal of Computer Vision, 2002, 48(3): 233-254.
|
| 8 |
Li Shaoyi, Lin Jian, Yang Xi, et al. BPFD-Net: Enhanced Dehazing Model Based on Pix2pix Framework for Single Image[J]. Machine Vision and Applications, 2021, 32(6): 124.
|
| 9 |
He Kaiming, Sun Jian, Tang Xiaoou. Single Image Haze Removal Using Dark Channel Prior[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2011, 33(12): 2341-2353.
|
| 10 |
Li Boyi, Peng Xiulian, Wang Zhangyang, et al. AOD-Net: All-in-one Dehazing Network[C]//2017 IEEE International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2017: 4780-4788.
|
| 11 |
李永福, 崔恒奇, 朱浩, 等. 一种基于改进AOD-Net的航拍图像去雾算法[J]. 自动化学报, 2022, 48(6): 1543-1559.
|
|
Li Yongfu, Cui Hengqi, Zhu Hao, et al. A Defogging Algorithm for Aerial Image with Improved AOD-Net[J]. Acta Automatica Sinica, 2022, 48(6): 1543-1559.
|
| 12 |
Cai Bolun, Xu Xiangmin, Jia Kui, et al. DehazeNet: An End-to-end System for Single Image Haze Removal[J]. IEEE Transactions on Image Processing, 2016, 25(11): 5187-5198.
|
| 13 |
郑凤仙, 王夏黎, 何丹丹, 等. 单幅图像去雾算法研究综述[J]. 计算机工程与应用, 2022, 58(3): 1-14.
|
|
Zheng Fengxian, Wang Xiali, He Dandan, et al. Survey of Single Image Defogging Algorithm[J]. Computer Engineering and Applications, 2022, 58(3): 1-14.
|
| 14 |
Burges C J C. A Tutorial on Support Vector Machines for Pattern Recognition[J]. Data Mining and Knowledge Discovery, 1998, 2(2): 121-167.
|
| 15 |
Maria Dominic Savio M, Deepa T, Bonasu A, et al. Image Processing for Face Recognition Using HAAR, HOG, and SVM Algorithms[J]. Journal of Physics: Conference Series, 2021, 1964(6): 062023.
|
| 16 |
Thamilselvan P. Lung Cancer Prediction and Classification Using Adaboost Data Mining Algorithm[J]. International Journal of Computer Theory and Engineering, 2022, 14(4): 149-154.
|
| 17 |
Zheng Xuebin, Zhou Bingxin, Li Ming, et al. MathNet: Haar-like Wavelet Multiresolution Analysis for Graph Representation Learning[J]. Knowledge-Based Systems, 2023, 273: 110609.
|
| 18 |
徐艺博, 于清华, 王炎娟, 等. 基于多源信息融合的巡飞弹对地目标识别与毁伤评估[J]. 系统仿真学报, 2024, 36(2): 511-521.
|
|
Xu Yibo, Yu Qinghua, Wang Yanjuan, et al. Ground Target Recognition and Damage Assessment of Patrol Missiles Based on Multi-source Information Fusion[J]. Journal of System Simulation, 2024, 36(2): 511-521.
|
| 19 |
Gao Chenqiang, Ye Sheng, Tian Hang, et al. Multi-scale Single-stage Pose Detection with Adaptive Sample Training in the Classroom Scene[J]. Knowledge-Based Systems, 2021, 222: 107008.
|
| 20 |
朱磊, 李东彪, 闫星志, 等. 基于改进Mask R-CNN深度学习算法的隧道裂缝智能检测方法[J]. 图学学报, 2023, 44(1): 177-183.
|
|
Zhu Lei, Li Dongbiao, Yan Xingzhi, et al. Intelligent Detection Method of Tunnel Cracks Based on Improved Mask R-CNN Deep Learning Algorithm[J]. Journal of Graphics, 2023, 44(1): 177-183.
|
| 21 |
徐佳薇, 武杰, 雷宇, 等. 用于烟雾病检测的Faster RCNN改进算法[J]. 数据采集与处理, 2022, 37(6): 1391-1400.
|
|
Xu Jiawei, Wu Jie, Lei Yu, et al. Improved Faster RCNN Algorithm for Moyamoya Disease Detection[J]. Journal of Data Acquisition and Processing, 2022, 37(6): 1391-1400.
|
| 22 |
Ren Shaoqing, He Kaiming, Girshick R, et al. Faster R-CNN: Towards Real-time Object Detection with Region Proposal Networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149.
|
| 23 |
孙靖凯. 基于改进的AOD-net和YOLOv5的雾天车辆行人检测算法[D]. 哈尔滨: 哈尔滨理工大学, 2022.
|
|
Sun Jingkai. Vehicleand Pedestrian Detection Algorithm Based on improved AOD-net and YOLOv5 in Hazy Eenvironment[D]. Harbin: Harbin University of Science and Technology, 2022.
|
| 24 |
Zhao Hang, Gallo O, Frosio I, et al. Loss Functions for Image Restoration with Neural Networks[J]. IEEE Transactions on Computational Imaging, 2017, 3(1): 47-57.
|
| 25 |
郭迎, 梁睿琳, 王润民. 基于CNN图像增强的雾天跨域自适应目标检测[J]. 计算机工程与应用, 2023, 59(16): 187-195.
|
| 26 |
陈琼红, 冀杰, 种一帆, 等. 基于AOD-net和SSD的雾天车辆和行人检测[J]. 重庆理工大学学报(自然科学), 2021, 35(5): 108-117.
|
|
Chen Qionghong, Ji Jie, Chong Yifan, et al. Vehicle and Pedestrian Detection Based on AOD-net and SSD Algorithm in Hazy Environment[J]. Journal of Chongqing University of Technology(Natural Science), 2021, 35(5): 108-117.
|
| 27 |
汪昱东, 郭继昌, 王天保. 一种改进的雾天图像行人和车辆检测算法[J]. 西安电子科技大学学报, 2020, 47(4): 70-77.
|
|
Wang Yudong, Guo Jichang, Wang Tianbao. Algorithm for Foggy-image Pedestrian and Vehicle Detection[J]. Journal of Xidian University, 2020, 47(4): 70-77.
|
| 28 |
Ding Changhao. Low Complexity and High Robustness Image Dehaze Algorithm[J]. Academic Journal of Computing & Information Science, 2022, 5(14): 27-32.
|
| 29 |
McCartney J E, Hall F F Jr. Optics of the Atmosphere: Scattering by Molecules and Particles[J]. Physics Today, 1977, 30(5): 76-77.
|
| 30 |
Yang Lingxiao, Zhang Ruyuan, Li Lida, et al. SimAM: A Simple, Parameter-free Attention Module for Convolutional Neural Networks[C]//Proceedings of the 38th International Conference on Machine Learning. Chia Laguna Resort: PMLR, 2021: 11863-11874.
|
| 31 |
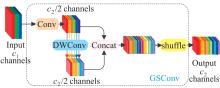
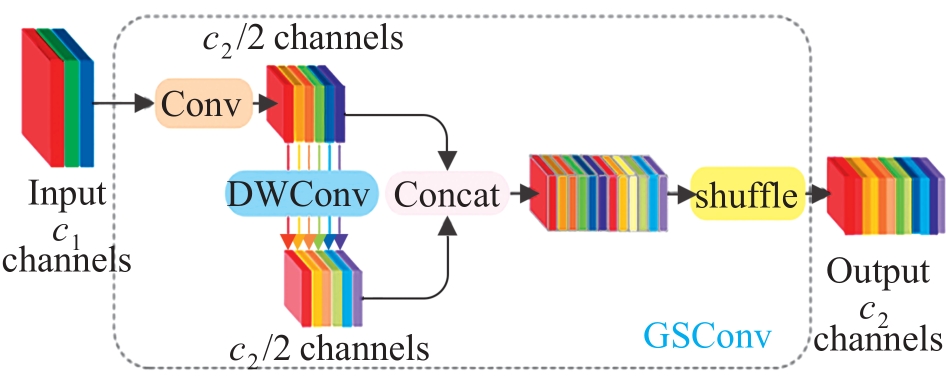
Li H, Li J, Wei H, et al. Slim-neck by GSConv: A Better Design Paradigm of Detector Architectures for Autonomous Vehicles[J]. Journal of Real-time Image Processing, 2024, 21(3): 62-72.
|