| 1 |
Bajic Bojana, Rikalovic Aleksandar, Suzic Nikola, et al. Industry 4.0 Implementation Challenges and Opportunities: A Managerial Perspective[J]. IEEE Systems Journal, 2021, 15(1): 546-559.
|
| 2 |
徐健, 刘高峰, 赵一剑, 等. 装配机器人的数字孪生虚实同步及抓取方法[J/OL]. 系统仿真学报. (2023-09-15) [2023-09-20]. .
|
|
Xu Jian, Liu Gaofeng, Zhao Yijian, et al. Virtual and Real Synchronization and Grasping Method of Digital Twin for Assembly Robot[J/OL]. Journal of System Simulation. (2023-09-15) [2023-09-20]. .
|
| 3 |
张霖, 陆涵. 从建模仿真看数字孪生[J]. 系统仿真学报, 2021, 33(5): 995-1007.
|
|
Zhang Lin, Lu Han. Discussing Digital Twin from of Modeling and Simulation[J]. Journal of System Simulation, 2021, 33(5): 995-1007.
|
| 4 |
张冰, 李欣, 万欣欣. 从数字孪生到数字工程建模仿真迈入新时代[J]. 系统仿真学报, 2019, 31(3): 369-376.
|
|
Zhang Bing, Li Xin, Wan Xinxin. From Digital Twin to Digital Engineering Modeling and Simulation Entering a New Era[J]. Journal of System Simulation, 2019, 31(3): 369-376.
|
| 5 |
赵浩然, 刘检华, 熊辉, 等. 面向数字孪生车间的三维可视化实时监控方法[J]. 计算机集成制造系统, 2019, 25(6): 1432-1443.
|
|
Zhao Haoran, Liu Jianhua, Xiong Hui, et al. 3D Visualization Real-time Monitoring Method for Digital Twin Workshop[J]. Computer Integrated Manufacturing Systems, 2019, 25(6): 1432-1443.
|
| 6 |
王栎淇, 范维, 陈传军, 等. 基于实时数据驱动的车间输送线数字孪生系统研究与实现[J]. 制造业自动化, 2023, 45(8): 171-177.
|
|
Wang Liqi, Fan Wei, Chen Chuanjun, et al. Research and Implementation of Digital Twin System of Workshop Conveyor Line Based on Real-time Data[J]. Manufacturing Automation, 2023, 45(8): 171-177.
|
| 7 |
杜莹莹, 罗映, 彭义兵, 等. 基于数字孪生的工业机器人三维可视化监控[J]. 计算机集成制造系统, 2023, 29(6): 2130-2138.
|
|
Du Yingying, Luo Ying, Peng Yibing, et al. 3D Visual Monitoring System of Industrial Robot Based on Digital Twin[J]. Computer Integrated Manufacturing Systems, 2023, 29(6): 2130-2138.
|
| 8 |
陈玉娇, 曾诗雨, 和红杰, 等. 工业机器人码垛数字孪生系统的研究与实现[J]. 计算机集成制造系统, 2023, 29(6): 1930-1940.
|
|
Chen Yujiao, Zeng Shiyu, He Hongjie, et al. Research and Implementation of Digital Twin System for Industrial Robot Palletizing[J]. Computer Integrated Manufacturing Systems, 2023, 29(6): 1930-1940.
|
| 9 |
魏新宇, 李玮, 郭志伟, 等. 炭块表面清理数字孪生机器人及其运动控制[J]. 计算机集成制造系统, 2023, 29(6): 1950-1964.
|
|
Wei Xinyu, Li Wei, Guo Zhiwei, et al. Digital Twin Robot and Its Motion Control for Surface Cleaning of Carbon Block[J]. Computer Integrated Manufacturing Systems, 2023, 29(6): 1950-1964.
|
| 10 |
Garg Gaurav, Kuts Vladimir, Anbarjafari Gholamreza. Digital Twin for FANUC Robots: Industrial Robot Programming and Simulation Using Virtual Reality[J]. Sustainability, 2021, 13(18): 10336.
|
| 11 |
陶飞, 张辰源, 戚庆林, 等. 数字孪生成熟度模型[J]. 计算机集成制造系统, 2022, 28(5): 1267-1281.
|
|
Tao Fei, Zhang Chenyuan, Qi Qinglin, et al. Digital Twin Maturity Model[J]. Computer Integrated Manufacturing Systems, 2022, 28(5): 1267-1281.
|
| 12 |
阴艳超, 冯嘉胜, 易斌, 等. 面向流程制造的数字孪生车间可视化监控系统研究[J]. 系统仿真学报, 2024, 36(1): 120-130.
|
|
Yin Yanchao, Feng Jiasheng, Yi Bin, et al. Visual Monitoring System of Digital Twin Workshop for Process Manufacturing[J]. Journal of System Simulation, 2024, 36(1): 120-130.
|
| 13 |
刘贝贝, 袁亮, 孔庆博, 等. 6自由度工业机器人运动轨迹优化方法研究[J]. 组合机床与自动化加工技术, 2020(2): 11-15.
|
|
Liu Beibei, Yuan Liang, Kong Qingbo, et al. Research on Motion Trajectory Optimization Method of 6-DOF Industrial Robot[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2020(2): 11-15.
|
| 14 |
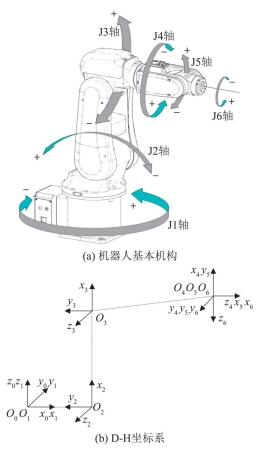
Craig J J. 机器人学导论[M]. 贠超, 译. 北京: 机械工业出版社, 2006: 1-94.
|
|
Craig J J. Introduction to Robotics Mechanics and Control[M]. Translated by Yun Chao. Beijing: China Machine Press, 2006: 1-94.
|
| 15 |
Liu Chuzhao, Gao Junyao, Bi Yuanzhen, et al. A Multitasking-oriented Robot Arm Motion Planning Scheme Based on Deep Reinforcement Learning and Twin Synchro-control[J]. Sensors, 2020, 20(12): 3515.
|
| 16 |
Xie Jiexin, Shao Zhenzhou, Li Yue, et al. Deep Reinforcement Learning with Optimized Reward Functions for Robotic Trajectory Planning[J]. IEEE Access, 2019, 7: 105669-105679.
|
| 17 |
马天, 席润韬, 吕佳豪, 等. 基于深度强化学习的移动机器人三维路径规划方法[J]. 计算机应用, 2024, 44(7): 2055-2064.
|
|
Ma Tian, Xi Runtao, Jiahao Lü, et al. Mobile Robot 3D Space Path Planning Method Based on Deep Reinforcement Learning[J]. Journal of Computer Applications, 2024, 44(7): 2055-2064.
|