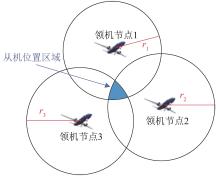
| 1 |
冯远博, 王冰切, 赵上. 电子对抗无人机蜂群组建构想[J]. 飞航导弹, 2021(10): 47-51.
|
| 2 |
郑期兼. 无人机技术在测绘测量中的应用分析[J]. 科技与创新, 2014(5): 40-41.
|
|
Zheng Qijian. Application of UAV Technology in Mapping Measurement[J]. Science and Technology & Innovation, 2014(5): 40-41.
|
| 3 |
徐华东. 无人机电力巡线智能避障方法研究[D]. 南京: 南京航空航天大学, 2014.
|
|
Xu Huadong. Research on Intelligent Obstacle Avoidance Methods for Power Lines Inspection with UAVs[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2014.
|
| 4 |
邹立岩, 张明智, 荣明. 智能无人机集群概念及主要发展趋势分析[J]. 战术导弹技术, 2019(5): 1-11, 43.
|
|
Zou Liyan, Zhang Mingzhi, Rong Ming. Analysis of Intelligent Unmanned Aircraft Systems Swarm Concept and Main Development Trend[J]. Tactical Missile Technology, 2019(5): 1-11, 43.
|
| 5 |
Rhudy M B, Gu Yu, Napolitano M R. Low-cost Loosely-coupled Dual GPS/INS for Attitude Estimation with Application to a Small UAV[C]//AIAA Guidance, Navigation, and Control (GNC) Conference. Reston, VA, USA: AIAA, 2013: 1-9.
|
| 6 |
Hu Gaoge, Gao Shengeng, Zhong Yongmin. A Derivative UKF for Tightly Coupled INS/GPS Integrated Navigation[J]. ISA Transactions, 2015, 56: 135-144.
|
| 7 |
史殿习, 刘聪, 佘馥江, 等. GPS拒止环境下基于定位置信度的多无人机协同定位方法[J]. 计算机科学, 2022, 49(4): 302-311.
|
|
Shi Dianxi, Liu Cong, She Fujiang, et al. Cooperation Localization Method Based on Location Confidence of Multi-UAV in GPS-denied Environment[J]. Computer Science, 2022, 49(4): 302-311.
|
| 8 |
Ibrahim Yassine Nouali, Slimane Zohra, Abdelmalek Abdelhafid. Change Point Detection-based TOA Estimation in UWB Indoor Ranging Systems[C]//2022 45th International Conference on Telecommunications and Signal Processing (TSP). Piscataway, NJ, USA: IEEE, 2022: 329-332.
|
| 9 |
Han Cho Seong, Sang Rae Yeo, Heon Ho Choi, et al. A Design of Synchronization Method for TDOA-based Positioning System[C]//2012 12th International Conference on Control, Automation and Systems. Piscataway, NJ, USA: IEEE, 2012: 1373-1375.
|
| 10 |
袁杰波, 杨峰, 张共愿, 等. 无人机编队飞行导航方法及其仿真研究[J]. 计算机仿真, 2011, 28(11): 64-67.
|
|
Yuan Jiebo, Yang Feng, Zhang Gongyuan, et al. A Navigation Method and Its Simulation for UAV Formation Flight[J]. Computer Simulation, 2011, 28(11): 64-67.
|
| 11 |
林国泉. 基于GNSS/UWB的无人机群分布式协同定位技术研究[D]. 成都: 电子科技大学, 2021.
|
|
Lin Guoquan. Research on Distributed Cooperative Localization Technology of Multi-UAVs Based on GNSS/UWB[D]. Chengdu: University of Electronic Science and Technology of China, 2021.
|
| 12 |
常伟明, 李永翔, 徐伯夏, 等. 无人机数据链国内外发展简介及关键技术探究[C]//第八届全国信号和智能信息处理与应用学术会议论文集. 北京: 中国高科技产业化研究会, 2014: 34-38, 106.
|
| 13 |
刘琪, 闫丽, 周正. UWB的技术特点及其发展方向[J]. 现代电信科技, 2009, 39(10): 6-10, 18.
|
|
Liu Qi, Yan Li, Zhou Zheng. Characteristics and Trends of UMB[J]. Modern Science & Technology of Telecommunications, 2009, 39(10): 6-10, 18.
|
| 14 |
朱珂, 王玮, 杨露彬. "5G+无人机"技术的教与学: 场景、路径与未来应用展望[J]. 远程教育杂志, 2019, 37(4): 33-41.
|
|
Zhu Ke, Wang Wei, Yang Lubin. Teaching and Learning of "5G+Drone" Technology: Scene, Path and Future Application Prospect[J]. Journal of Distance Education, 2019, 37(4): 33-41.
|
| 15 |
张平, 陈昊. 面向5G的定位技术研究综述[J]. 北京邮电大学学报, 2018, 41(5): 1-12.
|
|
Zhang Ping, Chen Hao. A Survey of Positioning Technology for 5G[J]. Journal of Beijing University of Posts and Telecommunications, 2018, 41(5): 1-12.
|
| 16 |
朱树云, 姜静. 扩展卡尔曼滤波算法在导航中的应用研究[J]. 自动化应用, 2019(11): 53-54.
|
|
Zhu Shuyun, Jiang Jing. Application Research of Extended Kalman Filtering Algorithm in Navigation[J]. Automation Application, 2019(11): 53-54.
|
 ), 黄郑1,3(
), 黄郑1,3(