

系统仿真学报 ›› 2026, Vol. 38 ›› Issue (6): 1647-1668.doi: 10.16182/j.issn1004731x.joss.25-0644
• 论文 • 上一篇
刘满强, 尚自强
收稿日期:2025-07-07
修回日期:2025-08-19
出版日期:2026-06-25
发布日期:2026-06-25
通讯作者:
尚自强
第一作者简介:刘满强(1970-),男,高工,硕士生导师,硕士,研究方向为有色冶金装备控制。
基金资助:Liu Manqiang, Shang Ziqiang
Received:2025-07-07
Revised:2025-08-19
Online:2026-06-25
Published:2026-06-25
Contact:
Shang Ziqiang
摘要:
为解决单一目标的轨迹规划方法已难以满足机械臂精确性、多样性和复杂性的要求,提出一种基于改进多目标差分进化算法(guided multi-objective differential evolution, GMODE)的轨迹规划模型。利用三次多项式插值与B样条曲线构建多目标函数,并通过GMODE克服传统算法在种群多样性不足、易陷入局部最优和收敛缓慢等问题。引入分组策略、参数生成机制、基于模糊C均值聚类的精英变异优化B样条控制节点。仿真实验结果表明:该方法在时间、能量与冲击方面均取得优异表现;在结合自适应权重后,多目标性能得到明显提升。
中图分类号:
刘满强,尚自强 . 改进多目标差分算法应用于机械臂多目标轨迹规划研究[J]. 系统仿真学报, 2026, 38(6): 1647-1668.
Liu Manqiang,Shang Ziqiang . Application of Improved Multi-objective Differential Algorithm in Robotic Arm Multi-objective Trajectory Planning[J]. Journal of System Simulation, 2026, 38(6): 1647-1668.
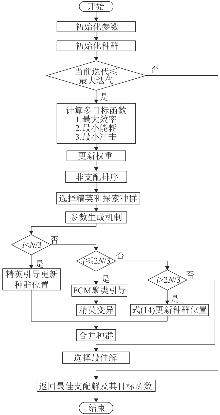
图1
多目标差分进化算法流程
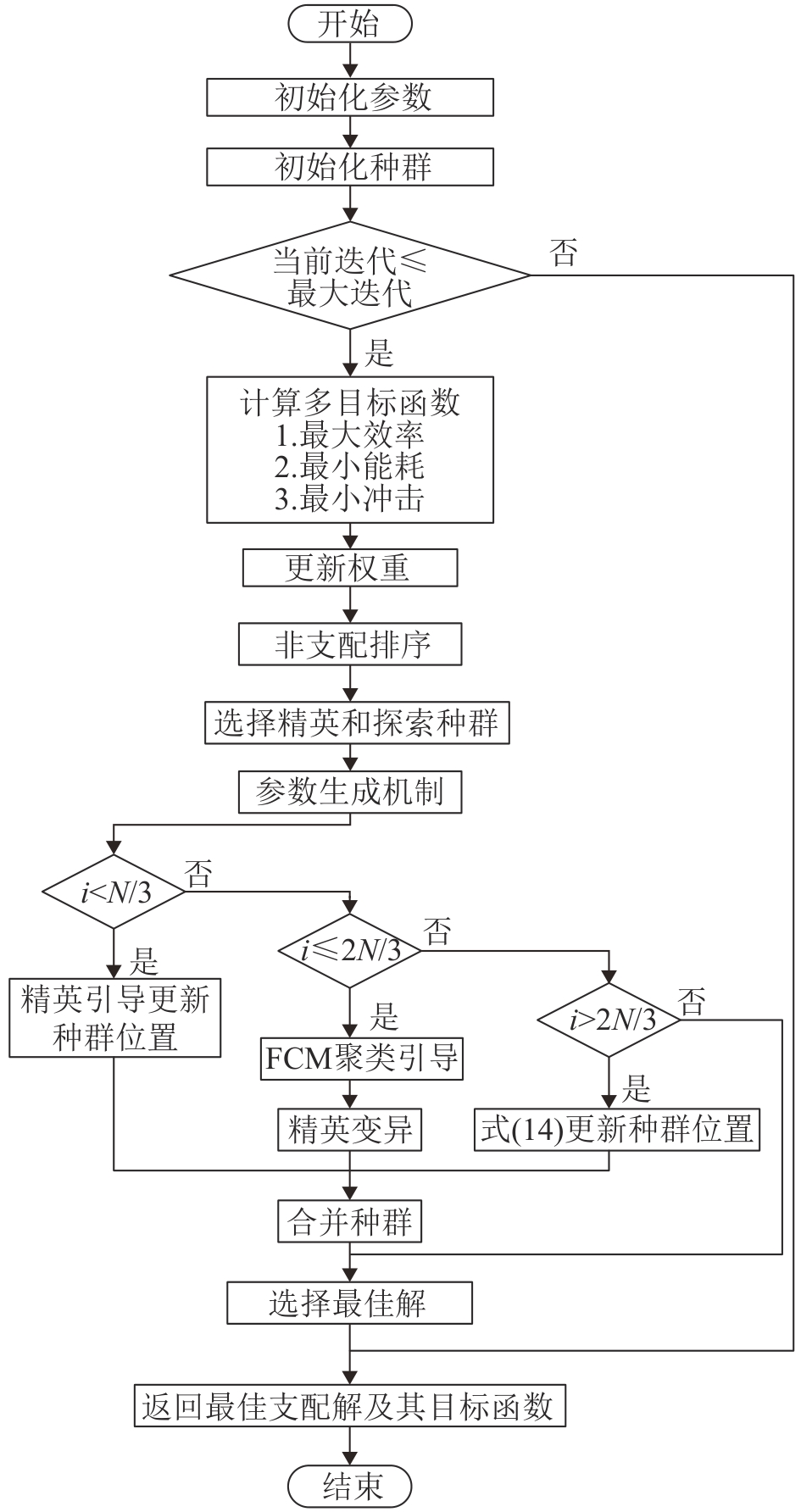

图2
各算法在三目标问题DTLZ5的非支配解
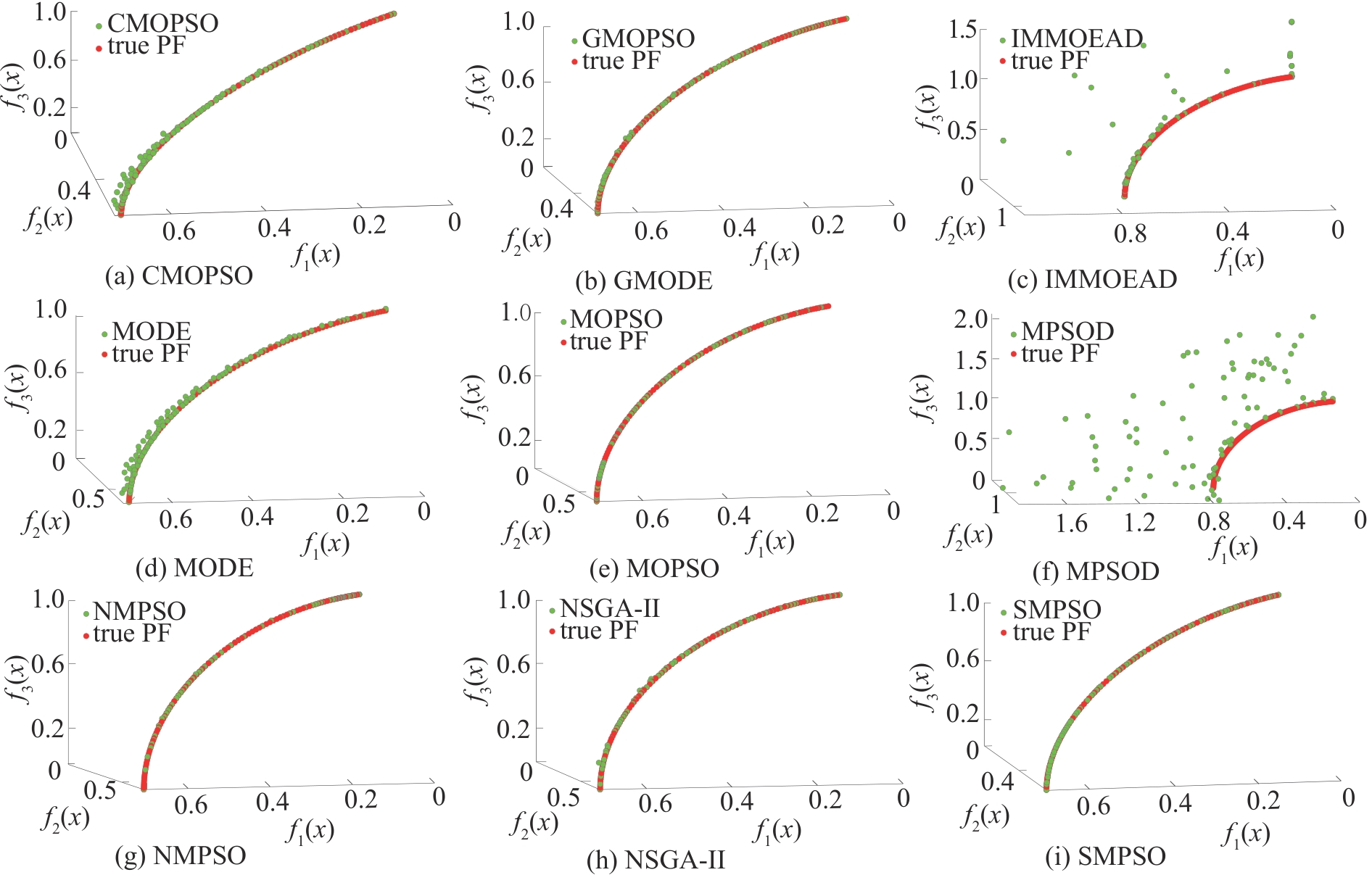

图3
各算法在三目标问题DTLZ7的非支配解
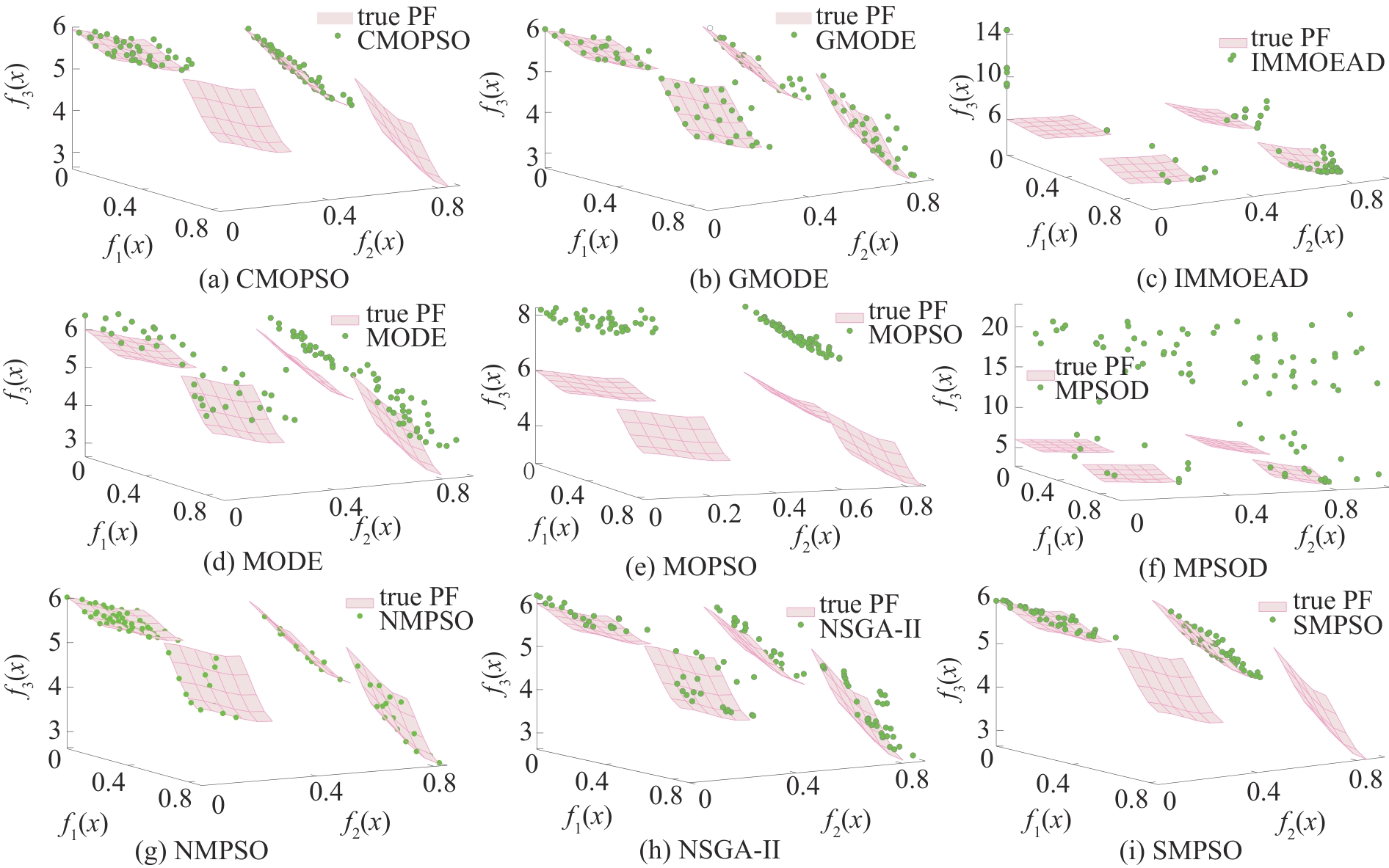

图4
各算法在三目标问题WFG4的非支配解
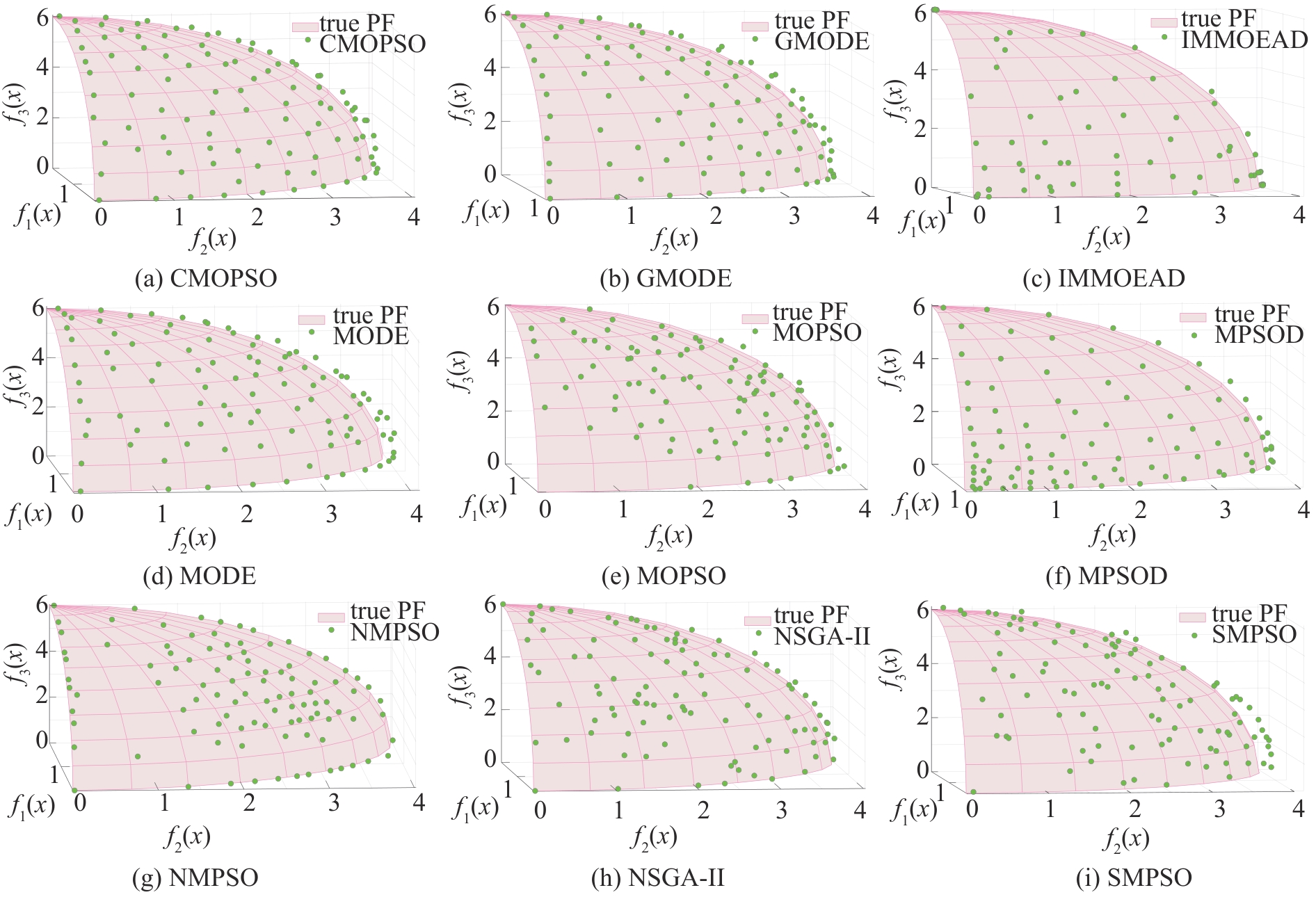

图5
各算法在三目标问题WFG5的非支配解
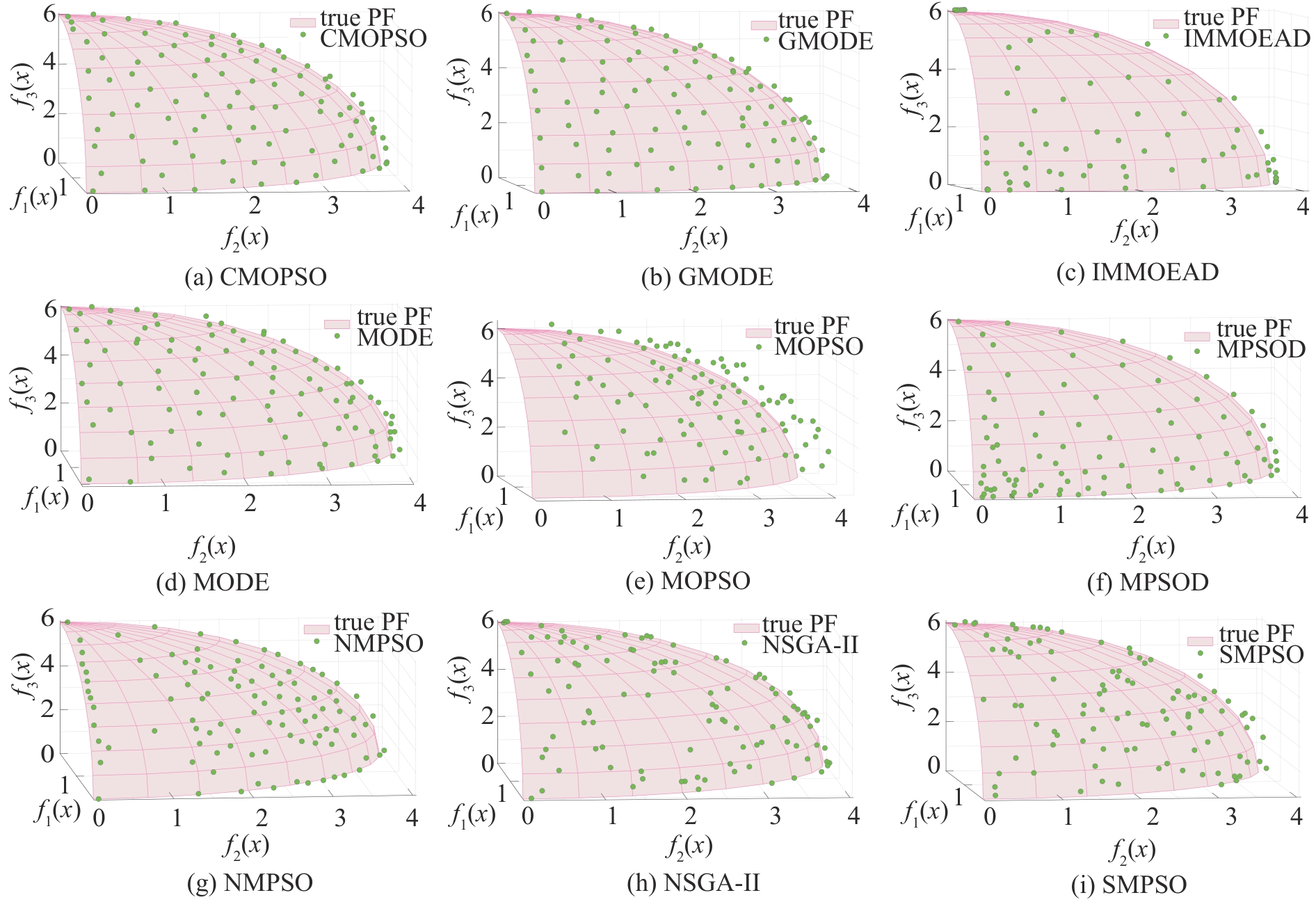
表1
各算法的IGD性能指标对比
| 问题 | 指标 | MODE | CMOPSO | IMMOEAD | MOPSO | MPSOD | NMPSO | NSGA-II | SMPSO | GMODE |
|---|---|---|---|---|---|---|---|---|---|---|
| DTLZ1 | Mean | 5.02E-01(-) | 1.44E+01(-) | 1.69E+00(-) | 9.80E+00(-) | 1.91E+00(-) | 3.35E+00(-) | 2.22E-01(-) | 2.35E+00(-) | 1.07E-01 |
| Std. | 2.97E-01 | 4.44E+00 | 6.65E-01 | 3.56E+00 | 6.53E-01 | 1.64E+00 | 2.49E-01 | 3.33E+00 | 1.61E-01 | |
| DTLZ2 | Mean | 6.90E-02(-) | 5.79E-02(-) | 7.54E-02(-) | 7.61E-02(-) | 5.51E-02(-) | 7.65E-02(-) | 6.98E-02(-) | 9.00E-02(-) | 5.45E-02 |
| Std. | 1.56E-03 | 8.13E-04 | 7.06E-04 | 5.11E-03 | 1.49E-04 | 2.89E-03 | 2.59E-03 | 9.41E-03 | 1.20E-03 | |
| DTLZ3 | Mean | 6.20E+01(-) | 1.42E+02(-) | 3.04E+01(-) | 2.06E+02(-) | 7.02E+01(-) | 9.56E+01(-) | 7.41E+00(-) | 3.75E+01(-) | 1.24E+00 |
| Std. | 1.33E+01 | 3.43E+01 | 7.17E+00 | 5.65E+01 | 1.01E+01 | 2.24E+01 | 4.12E+00 | 4.24E+01 | 1.22E+00 | |
| DTLZ4 | Mean | 7.36E-02(-) | 9.04E-02(-) | 7.83E-02(-) | 1.36E-01(-) | 5.53E-02(-) | 7.77E-02(-) | 1.16E-01(-) | 4.46E-01(-) | 5.37E-02 |
| Std. | 2.88E-03 | 1.62E-01 | 4.04E-03 | 2.20E-01 | 3.42E-04 | 2.44E-03 | 1.44E-01 | 2.39E-01 | 6.63E-04 | |
| DTLZ5 | Mean | 1.31E-02(-) | 7.29E-03(-) | 2.73E-02(-) | 8.30E-03(-) | 3.83E-02(-) | 1.22E-02(-) | 6.01E-03(-) | 5.91E-03(-) | 4.17E-03 |
| Std. | 1.38E-03 | 5.99E-04 | 4.60E-04 | 1.14E-03 | 2.45E-03 | 1.62E-03 | 3.75E-04 | 5.02E-04 | 3.84E-05 | |
| DTLZ6 | Mean | 4.63E-03(-) | 1.70E-01(-) | 3.52E+00(-) | 4.87E+00(-) | 3.21E-02(-) | 1.40E-02(-) | 5.93E-03(-) | 1.17E+00(-) | 4.15E-03 |
| Std. | 5.66E-05 | 4.36E-01 | 1.55E-01 | 5.39E-01 | 1.27E-03 | 2.67E-03 | 2.67E-04 | 8.72E-01 | 3.74E-05 | |
| DTLZ7 | Mean | 7.42E-02(-) | 1.42E-01(-) | 2.00E-01(-) | 1.90E+00(-) | 3.04E-01(-) | 6.89E-02(-) | 1.04E-01(-) | 6.63E-01(-) | 5.83E-02 |
| Std. | 2.64E-03 | 1.65E-01 | 6.17E-03 | 5.34E-01 | 1.16E-01 | 3.87E-03 | 5.15E-02 | 3.94E-01 | 9.79E-04 | |
| WFG1 | Mean | 1.05E+00(-) | 1.62E+00(-) | 1.08E+00(-) | 1.77E+00(-) | 1.59E+00(-) | 1.05E+00(-) | 5.75E-01(+) | 1.55E+00(-) | 8.81E-01 |
| Std. | 8.57E-02 | 3.57E-02 | 6.29E-02 | 1.28E-01 | 8.25E-02 | 6.88E-02 | 6.99E-02 | 4.02E-02 | 6.20E-02 | |
| WFG2 | Mean | 1.92E-01(-) | 1.85E-01(=) | 3.26E-01(-) | 2.21E-01(-) | 2.13E-01(-) | 3.80E-01(-) | 2.25E-01(-) | 2.74E-01(-) | 1.83E-01 |
| Std. | 4.53E-03 | 6.00E-03 | 1.16E-02 | 1.40E-02 | 9.44E-03 | 2.56E-02 | 1.34E-02 | 2.09E-02 | 3.78E-03 | |
| WFG3 | Mean | 2.35E-01(-) | 1.69E-01(=) | 2.26E-01(-) | 3.10E-01(-) | 2.85E-01(-) | 8.46E-02(+) | 1.30E-01(+) | 2.05E-01(-) | 1.63E-01 |
| Std. | 1.90E-02 | 1.80E-02 | 1.34E-02 | 8.61E-02 | 2.60E-02 | 6.96E-03 | 2.56E-02 | 3.53E-02 | 1.07E-02 | |
| WFG4 | Mean | 2.95E-01(-) | 2.67E-01(-) | 3.57E-01(-) | 4.06E-01(-) | 2.73E-01(-) | 2.96E-01(-) | 2.81E-01(-) | 3.28E-01(-) | 2.32E-01 |
| Std. | 6.50E-03 | 5.61E-03 | 7.44E-03 | 4.37E-02 | 5.50E-03 | 1.71E-02 | 9.29E-03 | 1.43E-02 | 2.86E-03 | |
| WFG5 | Mean | 2.48E-01(-) | 2.48E-01(-) | 3.54E-01(-) | 6.95E-01(-) | 2.55E-01(-) | 2.93E-01(-) | 2.85E-01(-) | 3.22E-01(-) | 2.31E-01 |
| Std. | 6.51E-03 | 6.26E-03 | 7.91E-03 | 5.18E-02 | 1.20E-03 | 1.12E-02 | 1.00E-02 | 2.19E-02 | 2.36E-03 | |
| WFG6 | Mean | 2.82E-01(-) | 2.56E-01(-) | 3.67E-01(-) | 3.51E-01(-) | 2.82E-01(-) | 4.07E-01(-) | 3.27E-01(-) | 3.80E-01(-) | 2.39E-01 |
| Std. | 2.25E-02 | 1.19E-02 | 7.42E-03 | 3.57E-02 | 1.13E-02 | 1.12E-02 | 1.59E-02 | 2.44E-02 | 3.83E-03 | |
| WFG7 | Mean | 2.72E-01(-) | 2.37E-01(+) | 3.61E-01(-) | 3.85E-01(-) | 2.66E-01(-) | 3.10E-01(-) | 2.82E-01(-) | 3.62E-01(-) | 2.52E-01 |
| Std. | 6.52E-03 | 5.14E-03 | 5.46E-03 | 4.11E-02 | 4.47E-03 | 9.96E-03 | 9.71E-03 | 2.57E-02 | 5.28E-03 | |
| WFG8 | Mean | 3.76E-01(-) | 3.64E-01(-) | 3.95E-01(-) | 6.05E-01(-) | 4.04E-01(-) | 3.64E-01(-) | 3.78E-01(-) | 5.03E-01(-) | 3.04E-01 |
| Std. | 8.97E-03 | 1.29E-02 | 7.00E-03 | 3.11E-02 | 1.41E-02 | 1.25E-02 | 9.37E-03 | 3.56E-02 | 4.56E-03 | |
| WFG9 | Mean | 3.51E-01(-) | 2.26E-01(+) | 3.43E-01(-) | 3.26E-01(-) | 2.68E-01(-) | 3.28E-01(-) | 2.84E-01(-) | 2.97E-01(-) | 2.44E-01 |
| Std. | 3.61E-02 | 5.29E-03 | 7.09E-03 | 3.67E-02 | 1.23E-02 | 5.94E-02 | 1.30E-02 | 1.80E-02 | 5.12E-03 | |
| ZDT1 | Mean | 6.13E-03(-) | 5.11E-03(-) | 1.49E-02(-) | 5.40E-01(-) | 4.42E-03(-) | 3.11E-02(-) | 1.29E-02(-) | 8.66E-02(-) | 3.79E-03 |
| Std. | 5.78E-04 | 4.21E-04 | 6.84E-04 | 1.05E-01 | 6.79E-04 | 2.06E-02 | 1.99E-03 | 1.02E-01 | 3.37E-05 | |
| ZDT2 | Mean | 6.63E-03(-) | 4.62E-03(-) | 1.87E-02(-) | 1.44E+00(-) | 3.93E-03(-) | 1.87E-02(-) | 2.46E-02(-) | 2.27E-02(-) | 3.83E-03 |
| Std. | 6.32E-04 | 3.95E-04 | 9.67E-04 | 2.59E-01 | 1.94E-04 | 4.15E-03 | 3.40E-02 | 6.54E-02 | 2.85E-05 | |
| ZDT3 | Mean | 9.90E-03(-) | 5.47E-03(-) | 1.32E-02(-) | 4.53E-01(-) | 1.07E-02(-) | 1.01E-01(-) | 1.18E-02(-) | 1.53E-01(-) | 4.50E-03 |
| Std. | 1.33E-03 | 6.02E-04 | 4.20E-04 | 7.81E-02 | 4.66E-04 | 8.19E-04 | 6.04E-03 | 9.00E-02 | 4.67E-05 | |
| ZDT4 | Mean | 1.52E+01(-) | 5.99E+00(-) | 9.19E-03(=) | 1.03E+01(-) | 2.37E+01(-) | 1.30E+01(-) | 2.70E-01(-) | 8.76E+00(-) | 9.46E-02 |
| Std. | 3.81E+00 | 3.40E+00 | 1.02E-02 | 4.49E+00 | 4.37E+00 | 1.23E+01 | 2.20E-01 | 5.66E+00 | 9.54E-02 | |
| ZDT6 | Mean | 3.09E-03(-) | 3.24E-03(-) | 1.13E+00(-) | 2.14E-01(-) | 3.09E-03(-) | 4.45E-03(-) | 5.31E-02(-) | 3.86E-03(-) | 3.05E-03 |
| Std. | 1.74E-05 | 1.32E-04 | 5.30E-02 | 2.99E-01 | 9.11E-06 | 5.54E-04 | 2.80E-02 | 1.77E-04 | 1.47E-05 | |
| +/-/= | 0/21/0 | 2/17/2 | 0/20/1 | 0/21/0 | 0/21/0 | 1/20/0 | 2/19/0 | 0/21/0 | ||
| Best/All | 0/21 | 2/21 | 1/21 | 0/21 | 0/21 | 1/21 | 1/21 | 0/21 | 16/21 | |
表2
各算法HV性能指标对比
| 问题 | 指标 | MODE | CMOPSO | IMMOEAD | MOPSO | MPSOD | NMPSO | NSGA-II | SMPSO | GMODE |
|---|---|---|---|---|---|---|---|---|---|---|
| DTLZ1 | Mean | 1.69E-01(-) | 0(-) | 0(-) | 0(-) | 0(-) | 1.76E-06(-) | 4.82E-01(-) | 1.57E-01(-) | 6.60E-01 |
| Std. | 3.25E-01 | 0 | 0 | 0 | 0 | 9.62E-06 | 3.69E-01 | 2.23E-01 | 3.08E-01 | |
| DTLZ2 | Mean | 5.18E-01(-) | 5.41E-01(-) | 5.25E-01(-) | 5.11E-01(-) | 5.56E-01(=) | 5.60E-01(+) | 5.29E-01(-) | 4.62E-01(-) | 5.56E-01 |
| Std. | 3.98E-03 | 2.47E-03 | 2.52E-03 | 1.10E-02 | 4.78E-04 | 1.03E-03 | 3.86E-03 | 2.17E-02 | 4.34E-03 | |
| DTLZ3 | Mean | 0(-) | 0(-) | 0(-) | 0(-) | 0(-) | 0(-) | 0(-) | 1.34E-02(-) | 1.80E-01 |
| Std. | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3.74E-02 | 2.47E-01 | |
| DTLZ4 | Mean | 5.12E-01(-) | 5.20E-01(-) | 5.25E-01(-) | 4.62E-01(-) | 5.55E-01(-) | 5.60E-01(=) | 5.14E-01(-) | 3.15E-01(-) | 5.59E-01 |
| Std. | 6.29E-03 | 8.11E-02 | 3.52E-03 | 1.04E-01 | 1.18E-03 | 1.03E-03 | 5.71E-02 | 1.20E-01 | 2.53E-03 | |
| DTLZ5 | Mean | 1.91E-01(-) | 1.97E-01(-) | 1.84E-01(-) | 1.96E-01(-) | 1.70E-01(-) | 1.96E-01(-) | 1.99E-01(-) | 1.98E-01(-) | 2.00E-01 |
| Std. | 1.26E-03 | 5.07E-04 | 4.21E-04 | 2.21E-03 | 3.15E-03 | 6.38E-04 | 1.92E-04 | 4.96E-04 | 4.36E-05 | |
| DTLZ6 | Mean | 2.00E-01(-) | 1.69E-01(-) | 0(-) | 0(-) | 1.83E-01(-) | 1.96E-01(-) | 1.99E-01(-) | 4.77E-02(-) | 2.00E-01 |
| Std. | 4.24E-05 | 7.25E-02 | 0 | 0 | 8.88E-04 | 1.04E-03 | 1.48E-04 | 8.54E-02 | 3.75E-05 | |
| DTLZ7 | Mean | 2.63E-01(-) | 2.57E-01(-) | 2.21E-01(-) | 6.97E-03(-) | 1.53E-01(-) | 2.75E-01(-) | 2.46E-01(-) | 1.28E-01(-) | 2.79E-01 |
| Std. | 2.55E-03 | 1.56E-02 | 4.09E-03 | 1.02E-02 | 4.79E-02 | 1.18E-03 | 7.59E-03 | 7.03E-02 | 5.13E-04 | |
| WFG1 | Mean | 4.72E-01(-) | 2.26E-01(-) | 3.74E-01(-) | 1.72E-01(-) | 2.20E-01(-) | 4.37E-01(-) | 6.93E-01(=) | 2.59E-01(-) | 7.08E-01 |
| Std. | 4.94E-02 | 1.62E-02 | 3.73E-02 | 4.07E-02 | 3.39E-02 | 3.34E-02 | 4.05E-02 | 1.34E-02 | 4.34E-02 | |
| WFG2 | Mean | 9.06E-01(-) | 9.18E-01(-) | 8.64E-01(-) | 8.84E-01(-) | 8.81E-01(-) | 8.65E-01(-) | 9.04E-01(-) | 8.41E-01(-) | 9.30E-01 |
| Std. | 2.49E-03 | 2.83E-03 | 7.23E-03 | 1.07E-02 | 8.17E-03 | 1.33E-02 | 5.01E-03 | 1.54E-02 | 1.08E-03 | |
| WFG3 | Mean | 3.10E-01(-) | 3.45E-01(=) | 3.13E-01(-) | 2.66E-01(-) | 2.62E-01(-) | 3.79E-01(+) | 3.75E-01+ | 3.34E-01(-) | 3.48E-01 |
| Std. | 8.74E-03 | 9.32E-03 | 6.12E-03 | 3.10E-02 | 1.55E-02 | 4.23E-03 | 1.00E-02 | 1.73E-02 | 5.99E-03 | |
| WFG4 | Mean | 4.68E-01(-) | 4.84E-01(-) | 4.87E-01(-) | 4.27E-01(-) | 4.92E-01(-) | 5.41E-01(+) | 5.03E-01(-) | 4.52E-01(-) | 5.37E-01 |
| Std. | 3.77E-03 | 3.64E-03 | 2.81E-03 | 1.41E-02 | 4.99E-03 | 2.37E-03 | 5.89E-03 | 9.84E-03 | 3.10E-03 | |
| WFG5 | Mean | 4.88E-01(-) | 4.81E-01(-) | 4.59E-01(-) | 2.58E-01(-) | 4.82E-01(-) | 5.12E-01(+) | 4.82E-01(-) | 4.40E-01(-) | 5.08E-01 |
| Std. | 5.72E-03 | 4.92E-03 | 5.35E-03 | 1.75E-02 | 2.09E-03 | 3.57E-03 | 5.30E-03 | 1.51E-02 | 2.47E-03 | |
| WFG6 | Mean | 4.79E-01(-) | 4.98E-01(-) | 4.64E-01(-) | 4.49E-01(-) | 4.85E-01(-) | 4.17E-01(-) | 4.52E-01(-) | 4.13E-01(-) | 5.22E-01 |
| Std. | 2.11E-02 | 1.33E-02 | 1.22E-02 | 1.63E-02 | 1.14E-02 | 9.86E-04 | 1.57E-02 | 2.00E-02 | 6.24E-03 | |
| WFG7 | Mean | 4.88E-01(-) | 5.17E-01(-) | 4.91E-01(-) | 4.23E-01(-) | 5.12E-01(-) | 5.52E-01(+) | 5.13E-01(-) | 4.22E-01(-) | 5.23E-01 |
| Std. | 4.91E-03 | 4.00E-03 | 4.43E-03 | 1.92E-02 | 4.87E-03 | 1.15E-03 | 5.20E-03 | 1.94E-02 | 4.51E-03 | |
| WFG8 | Mean | 4.06E-01(-) | 4.12E-01(-) | 4.21E-01(-) | 3.14E-01(-) | 3.79E-01(-) | 4.58E-01(=) | 4.26E-01(-) | 3.36E-01(-) | 4.58E-01 |
| Std. | 5.84E-03 | 7.17E-03 | 3.54E-03 | 9.70E-03 | 8.60E-03 | 3.42E-03 | 5.42E-03 | 1.61E-02 | 2.80E-03 | |
| WFG9 | Mean | 4.05E-01(-) | 5.05E-01(+) | 4.81E-01(-) | 4.59E-01(-) | 4.80E-01(-) | 4.66E-01(=) | 4.85E-01(-) | 4.60E-01(-) | 5.02E-01 |
| Std. | 2.96E-02 | 5.28E-03 | 5.29E-03 | 1.08E-02 | 1.03E-02 | 5.62E-02 | 1.09E-02 | 1.14E-02 | 3.74E-03 | |
| ZDT1 | Mean | 7.15E-01(-) | 7.17E-01(-) | 7.03E-01(-) | 1.71E-01(-) | 7.18E-01(-) | 6.88E-01(-) | 7.06E-01(-) | 6.14E-01(-) | 7.21E-01 |
| Std. | 9.23E-04 | 8.16E-04 | 8.65E-04 | 7.35E-02 | 1.38E-03 | 2.23E-02 | 2.63E-03 | 1.20E-01 | 3.06E-05 | |
| ZDT2 | Mean | 4.39E-01(-) | 4.43E-01(-) | 4.18E-01(-) | 0(-) | 4.45E-01(-) | 4.36E-01(-) | 4.16E-01(-) | 4.23E-01(-) | 4.45E-01 |
| Std. | 9.16E-04 | 9.34E-04 | 1.54E-03 | 0 | 2.47E-04 | 2.30E-03 | 3.32E-02 | 7.11E-02 | 3.46E-05 | |
| ZDT3 | Mean | 5.93E-01(-) | 5.99E-01(-) | 5.94E-01(-) | 2.91E-01(-) | 5.97E-01(-) | 5.67E-01(-) | 5.95E-01(-) | 5.55E-01(-) | 6.00E-01 |
| Std. | 1.35E-03 | 1.09E-03 | 1.05E-03 | 5.72E-02 | 1.44E-03 | 3.90E-04 | 1.60E-02 | 8.55E-02 | 2.79E-05 | |
| ZDT4 | Mean | 0(-) | 0(-) | 7.11E-01(=) | 0(-) | 0(-) | 0(-) | 4.80E-01(-) | 0(-) | 6.09E-01 |
| Std. | 0 | 0 | 1.09E-02 | 0 | 0 | 0 | 1.59E-01 | 0 | 1.14E-01 | |
| ZDT6 | Mean | 3.89E-01(-) | 3.89E-01(-) | 0(-) | 2.64E-01(-) | 3.88E-01(-) | 3.88E-01(-) | 3.22E-01(-) | 3.88E-01(-) | 3.89E-01 |
| Std. | 1.67E-05 | 1.44E-04 | 0 | 1.57E-01 | 1.02E-05 | 4.68E-04 | 3.40E-02 | 1.48E-04 | 1.34E-05 | |
| +/-/= | 0/21/0 | 1/19/1 | 0/201 | 0/21/0 | 0/20/1 | 5/15/3 | 1/19/1 | 0/21/0 | ~ | |
| Best/All | 0/21 | 1/21 | 1/21 | 0/21 | 0/21 | 7/21 | 0/21 | 0/21 | 12/21 | |
表3
KUKA KR3 R540机械臂D-H参数
| 连杆 | ||||
|---|---|---|---|---|
| 1 | 0.345 | 0.02 | -90 | |
| 2 | 0 | 0.26 | 0 | |
| 3 | 0 | 0.02 | -90 | |
| 4 | 0.260 | 0 | 90 | |
| 5 | 0 | 0 | -90 | |
| 6 | 0.075 | 0 | 0 |
图6
机械臂D-H连杆坐标系
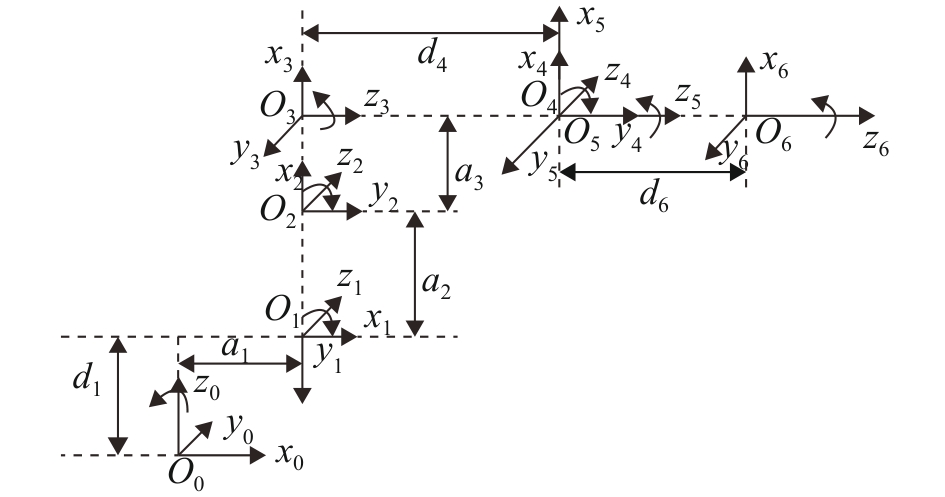
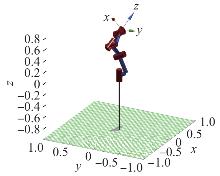
图7
机械臂仿真图
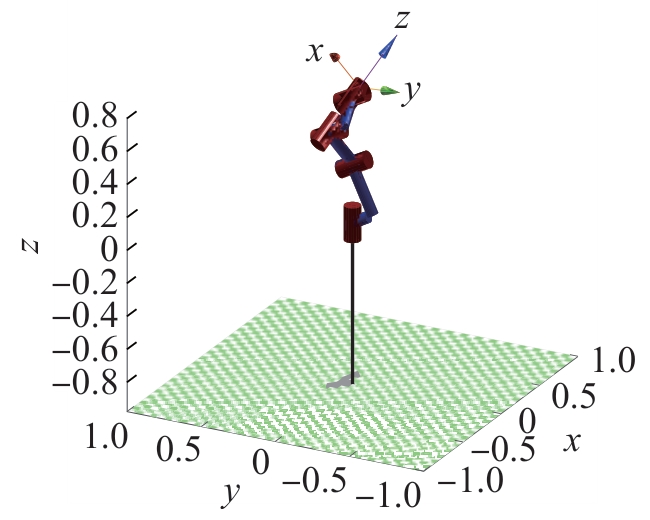
表4
插值路径点
| 关节编号 | 起始点 | 路径点1 | 路径点2 | 终止点 |
|---|---|---|---|---|
| 1 | -0.523 6 | 0.523 6 | 1.047 2 | 1.570 8 |
| 2 | 0 | 1.047 2 | -0.523 6 | 0 |
| 3 | 0.261 8 | 0.785 4 | 1.047 2 | 1.309 0 |
| 4 | -0.523 6 | 0.314 2 | -0.942 5 | -0.523 6 |
| 5 | 0.418 9 | 1.152 0 | 1.518 4 | 1.885 0 |
| 6 | -0.785 4 | 0.157 1 | -1.256 6 | -0.785 4 |

图8
3-5-3次多项式与B样条曲线融合插值的路径曲线
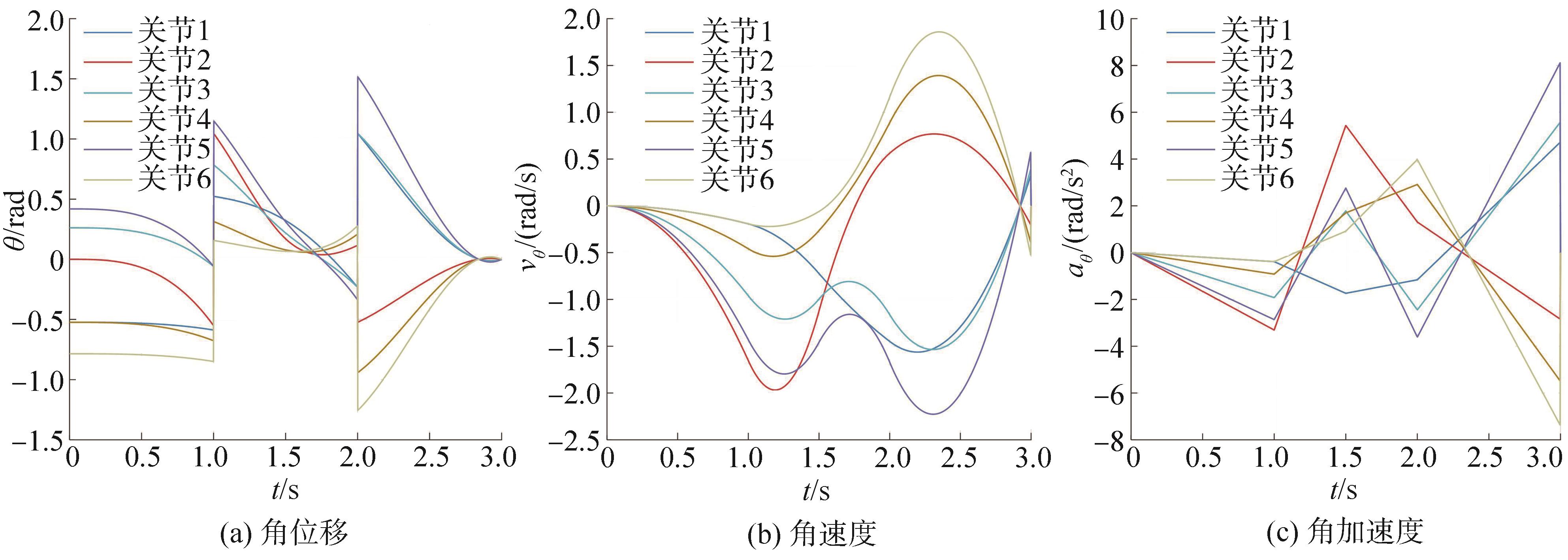

图9
MOPSO算法优化后的路径曲线
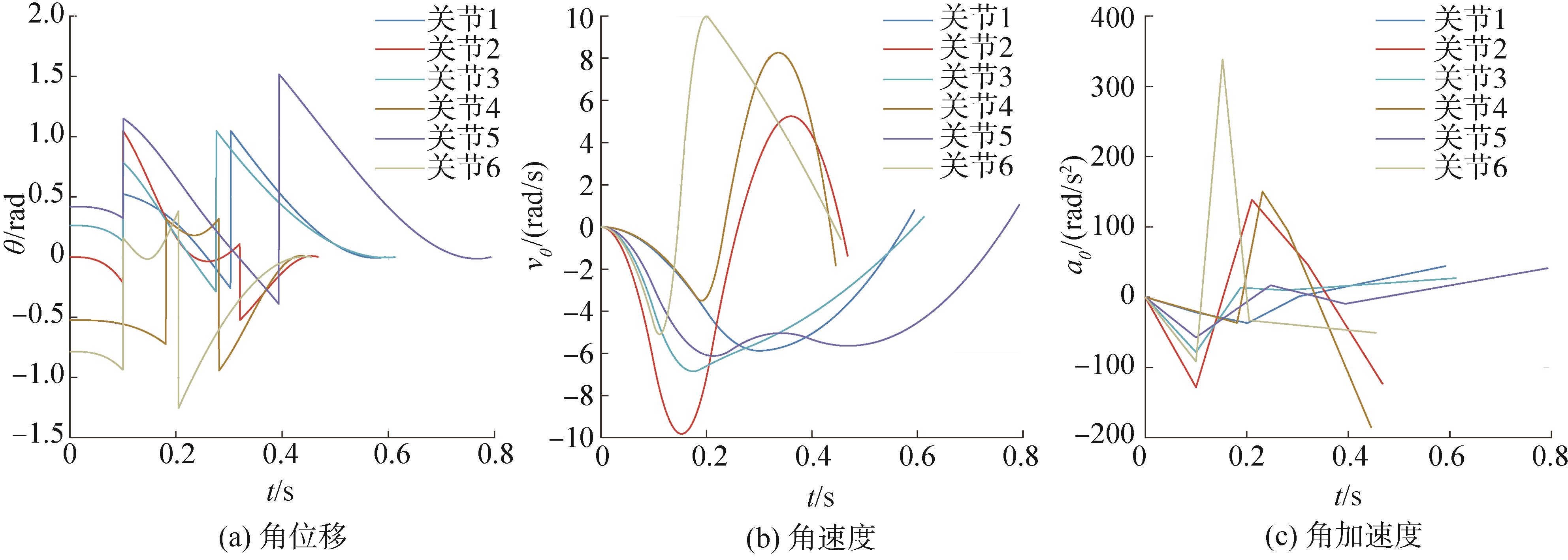

图10
MODE算法优化后的路径曲线
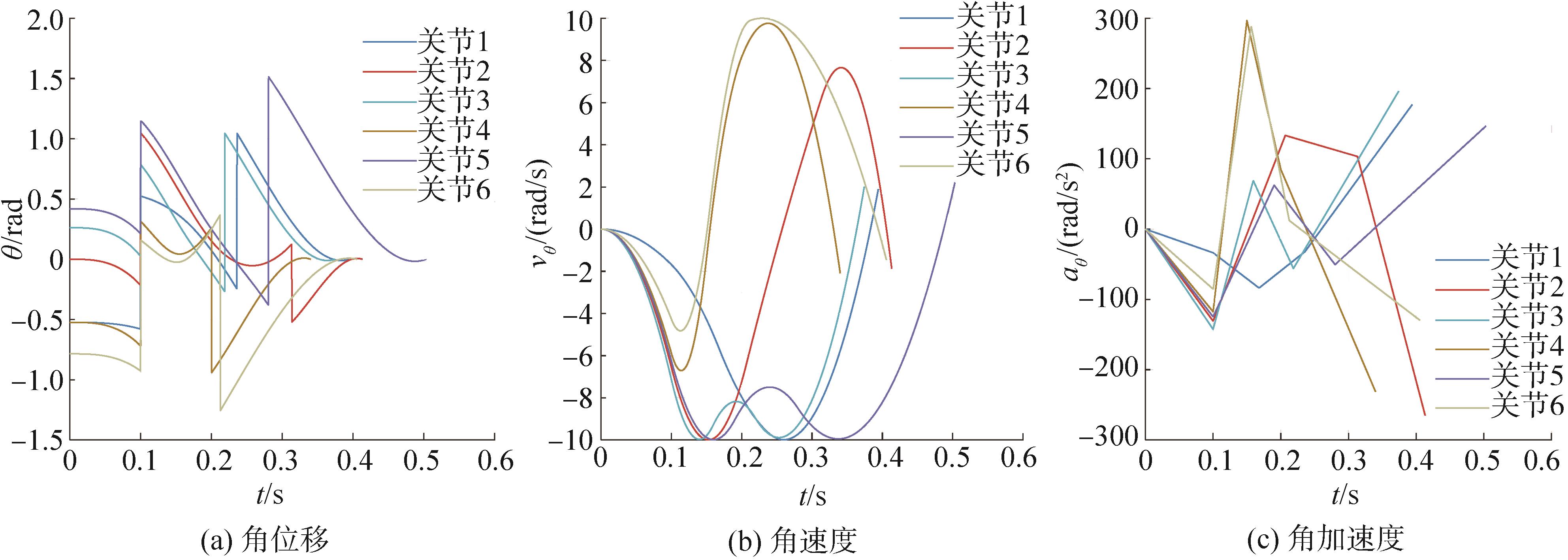

图11
GMODE算法优化后的路径曲线
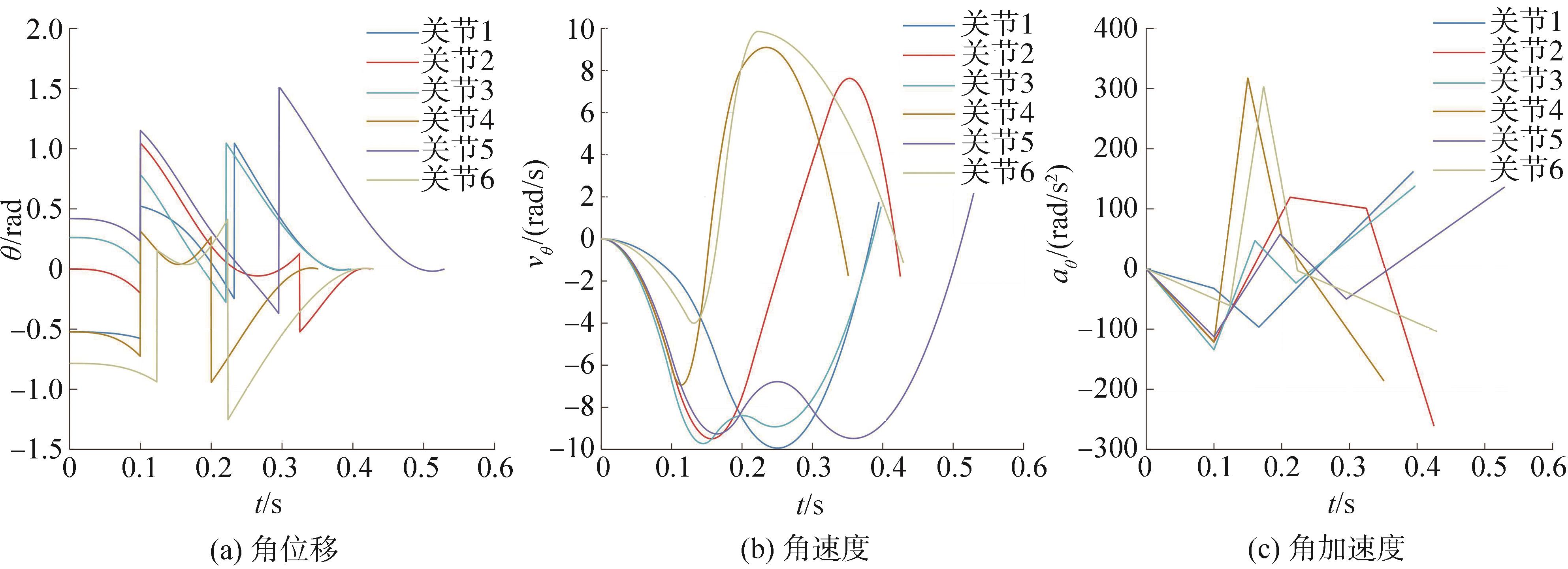

图12
机械臂各关节在不同算法下的时间、冲击和能量收敛图
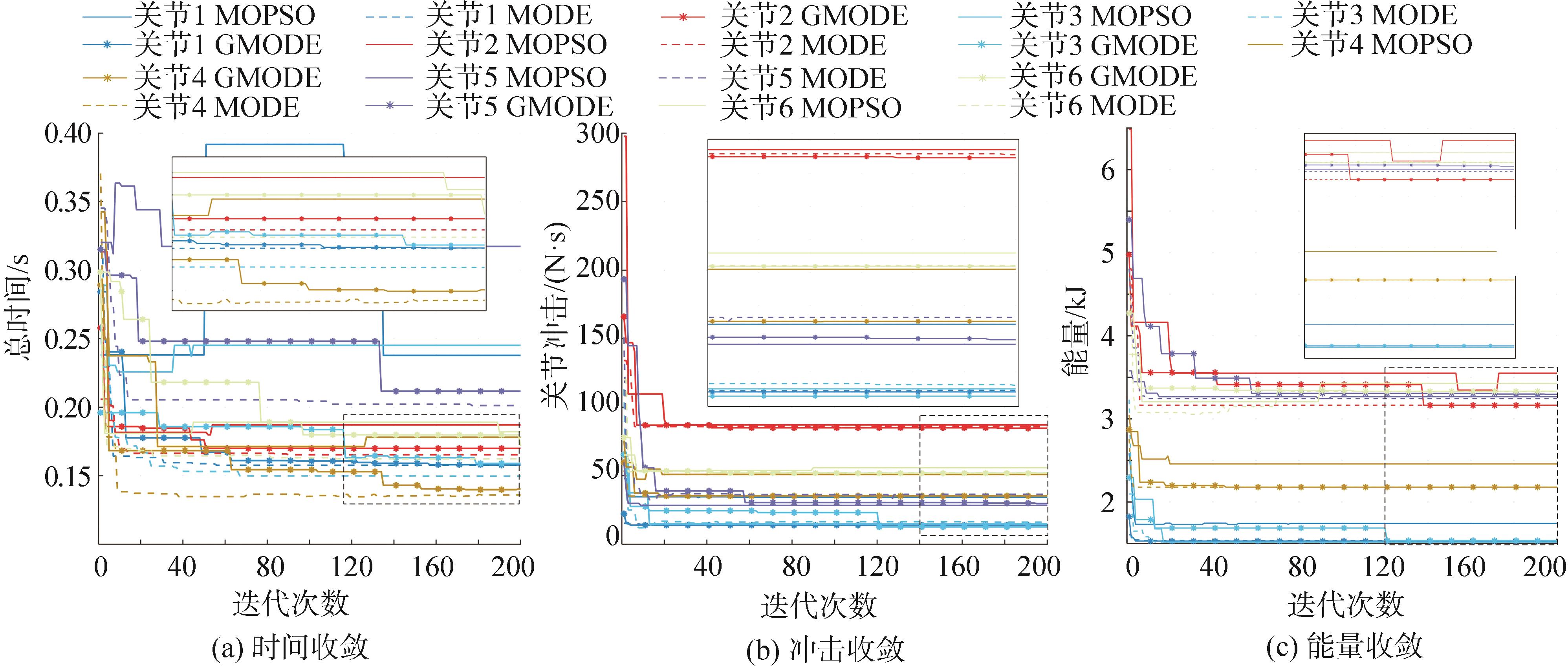

图13
引入自适应权重后不同算法下机械臂各关节时间、冲击与能量的收敛曲线
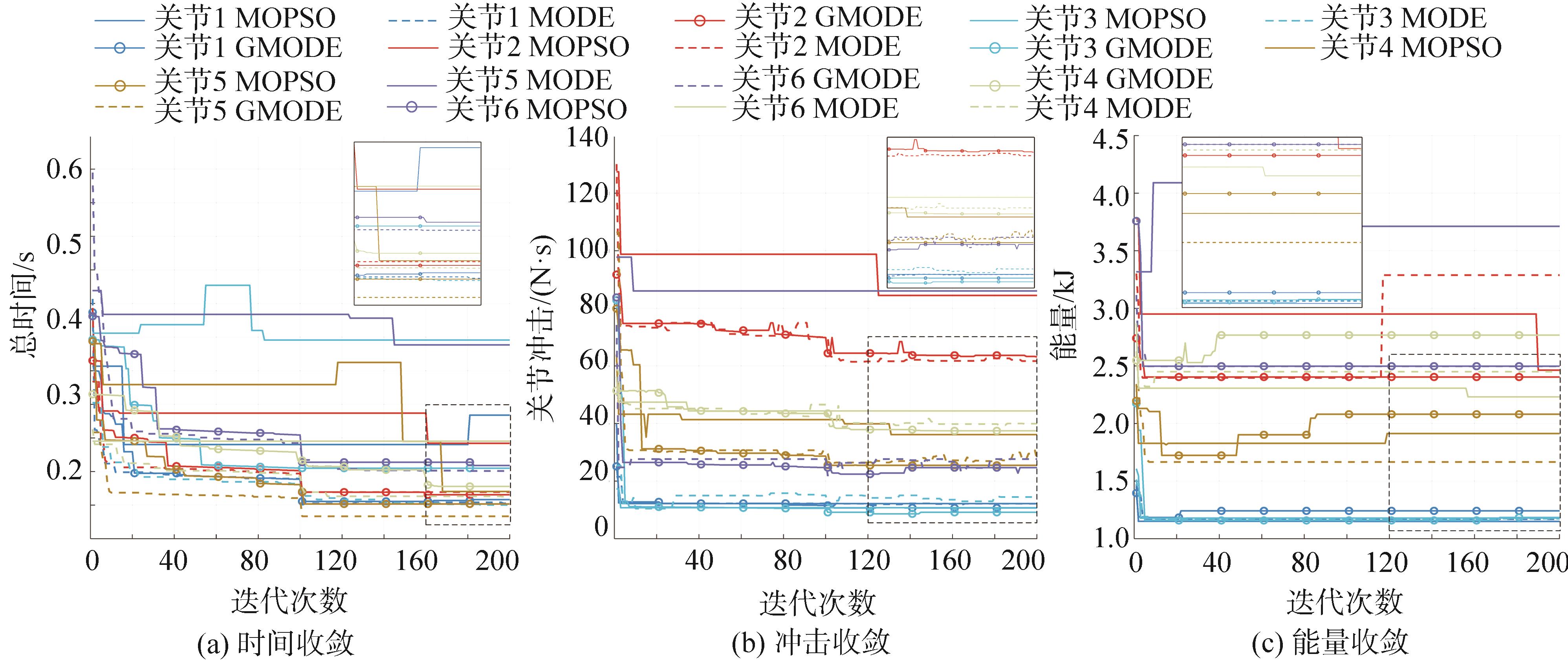
表5
权重占比验证
| 实验场景 | 时间权重 | 冲击权重 | 能量权重 | 评价指标 |
|---|---|---|---|---|
| 自设场景I | 0.50 | 0.35 | 0.15 | 59.079 1 |
| 自设场景II | 0.4 | 0.4 | 0.2 | 64.200 7 |
| 自设场景III | 0.8 | 0.1 | 0.1 | 25.633 1 |
| 平衡权重 | 1/3 | 1/3 | 1/3 | 60.373 8 |
| 时间优先 | 0.6 | 0.2 | 0.2 | 45.012 0 |
| 能量优先 | 0.2 | 0.2 | 0.6 | 52.256 4 |
| 冲击优先 | 0.2 | 0.6 | 0.2 | 95.544 5 |
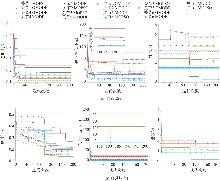
图14
两种权重下的多目标优化收敛曲线
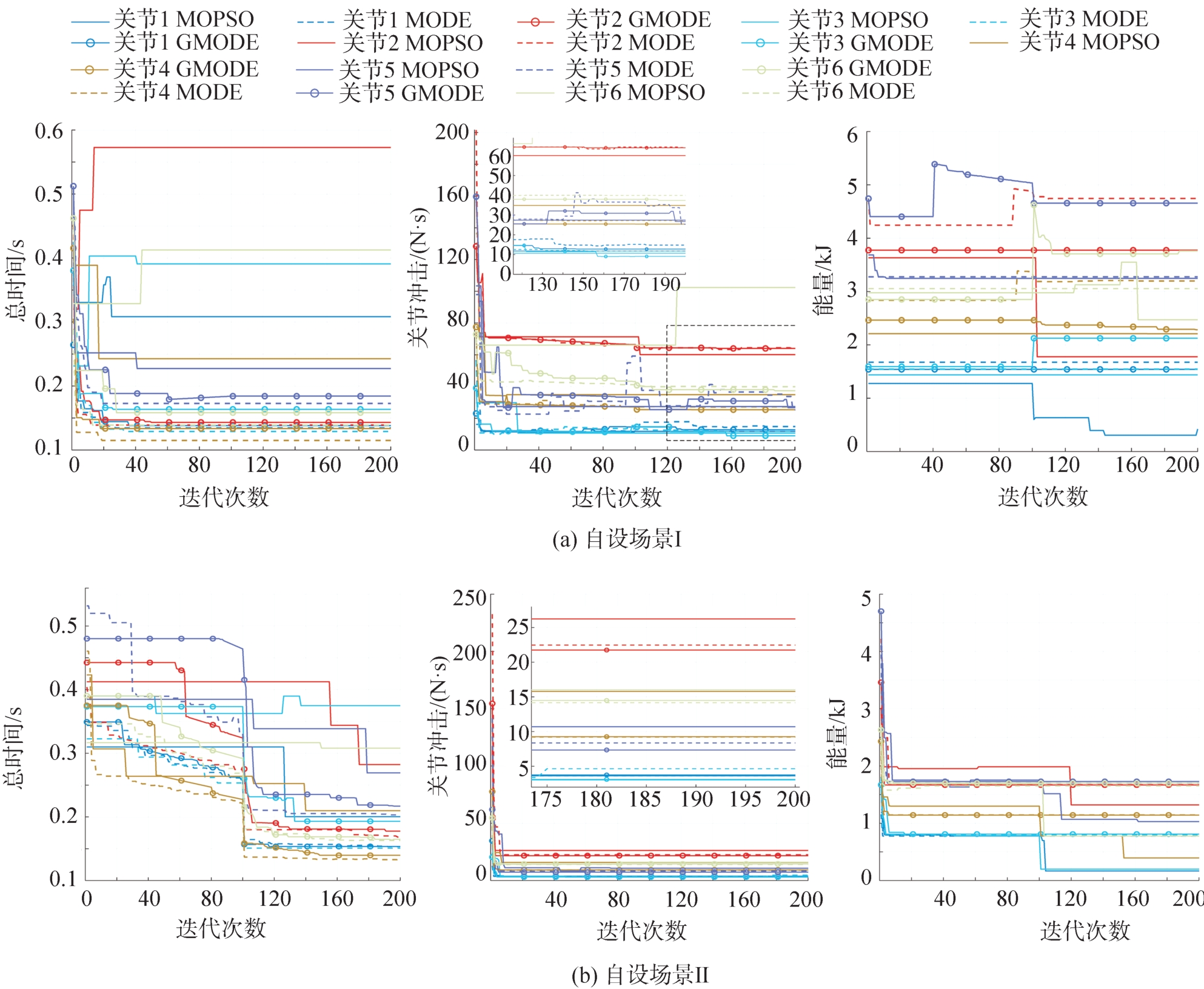
表6
RS007LD-H参数
| 连杆 | ||||
|---|---|---|---|---|
| 1 | 0.180 | 0.148 7 | -90 | |
| 2 | 0 | 0.180 0 | 0 | |
| 3 | 0 | 0.455 0 | -90 | |
| 4 | 0.475 | 0 | 90 | |
| 5 | 0 | 0 | -90 | |
| 6 | 0.078 | 0 | 0 |

图15
机械臂运动过程
表7
机械臂路径点对应关节角度
| 关节编号 | 起点 | 路径点1 | 路径点2 | 路径点3 | 终点 |
|---|---|---|---|---|---|
| 1 | -0.057 7 | -0.057 7 | -0.057 7 | -0.057 7 | -0.057 7 |
| 2 | -0.957 7 | -0.586 5 | -0.239 7 | -0.261 5 | -0.565 1 |
| 3 | 2.144 | 2.144 | 2.189 | 2.020 | 1.492 |
| 4 | -0.261 2 | -0.261 2 | -0.261 2 | -0.261 2 | -0.261 2 |
| 5 | 0.052 7 | 0.052 7 | 0.052 7 | 0.052 7 | 0.052 7 |
| 6 | 3.200 | 3.210 | 3.210 | 3.210 | 3.210 |
图16
更改目标权重前后的对比曲线
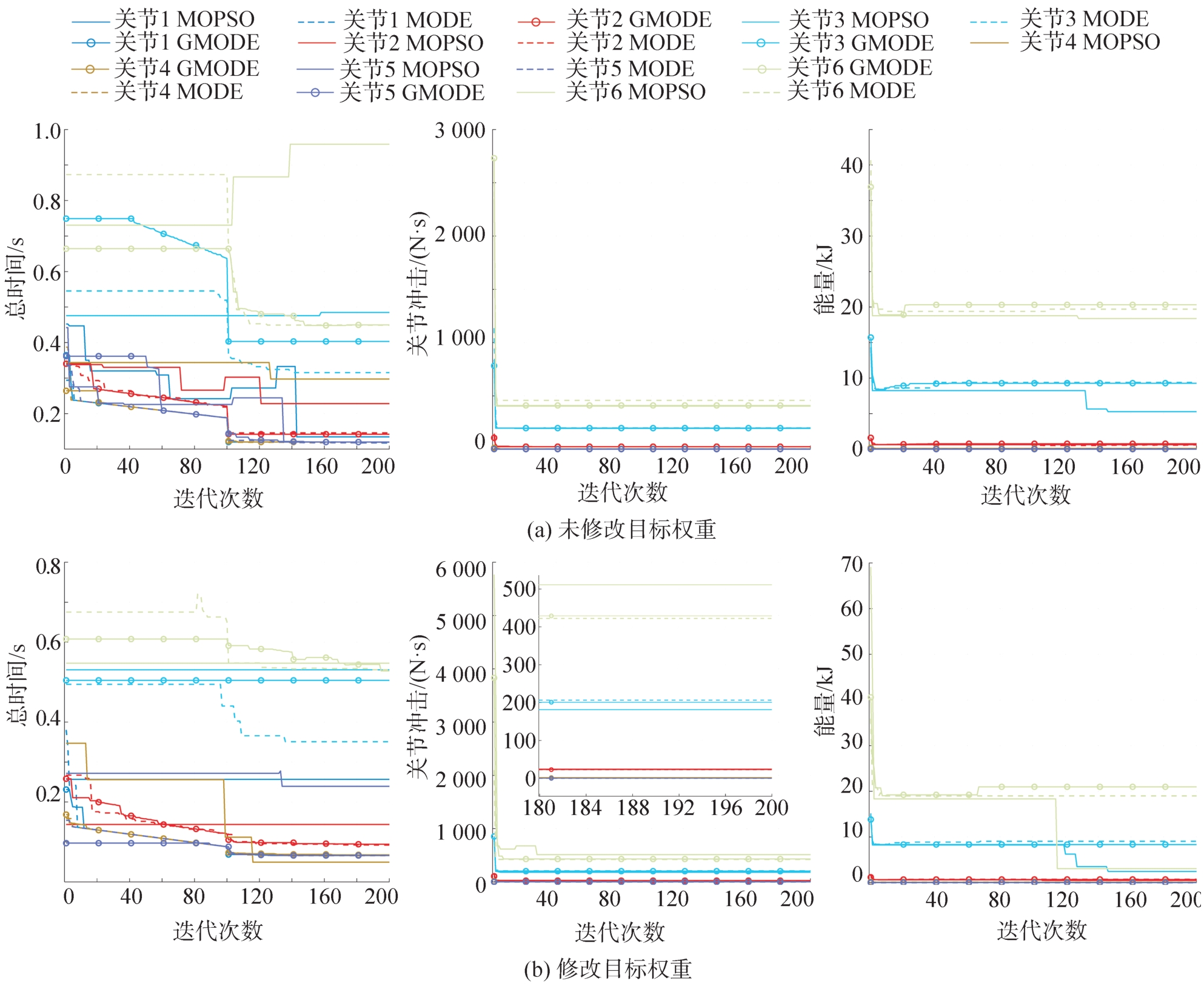
表8
路径点对应关节角度
| 关节编号 | 起始点 | 路径点1 | 路径点2 | 终止点 |
|---|---|---|---|---|
| 1 | 0 | -0.184 6 | -0.368 6 | -0.392 7 |
| 2 | -1.570 8 | -1.827 9 | -1.554 5 | -1.047 2 |
| 3 | -0.785 4 | -0.066 4 | 0.558 2 | 0.523 6 |
| 4 | 1.047 2 | 1.168 4 | 0.773 1 | 0.392 7 |
| 5 | 0.523 6 | 0.734 1 | 0.740 5 | 0.523 6 |
| 6 | -0.523 6 | -0.767 1 | -0.974 7 | -0.785 4 |

图17
计算效率数值分布图
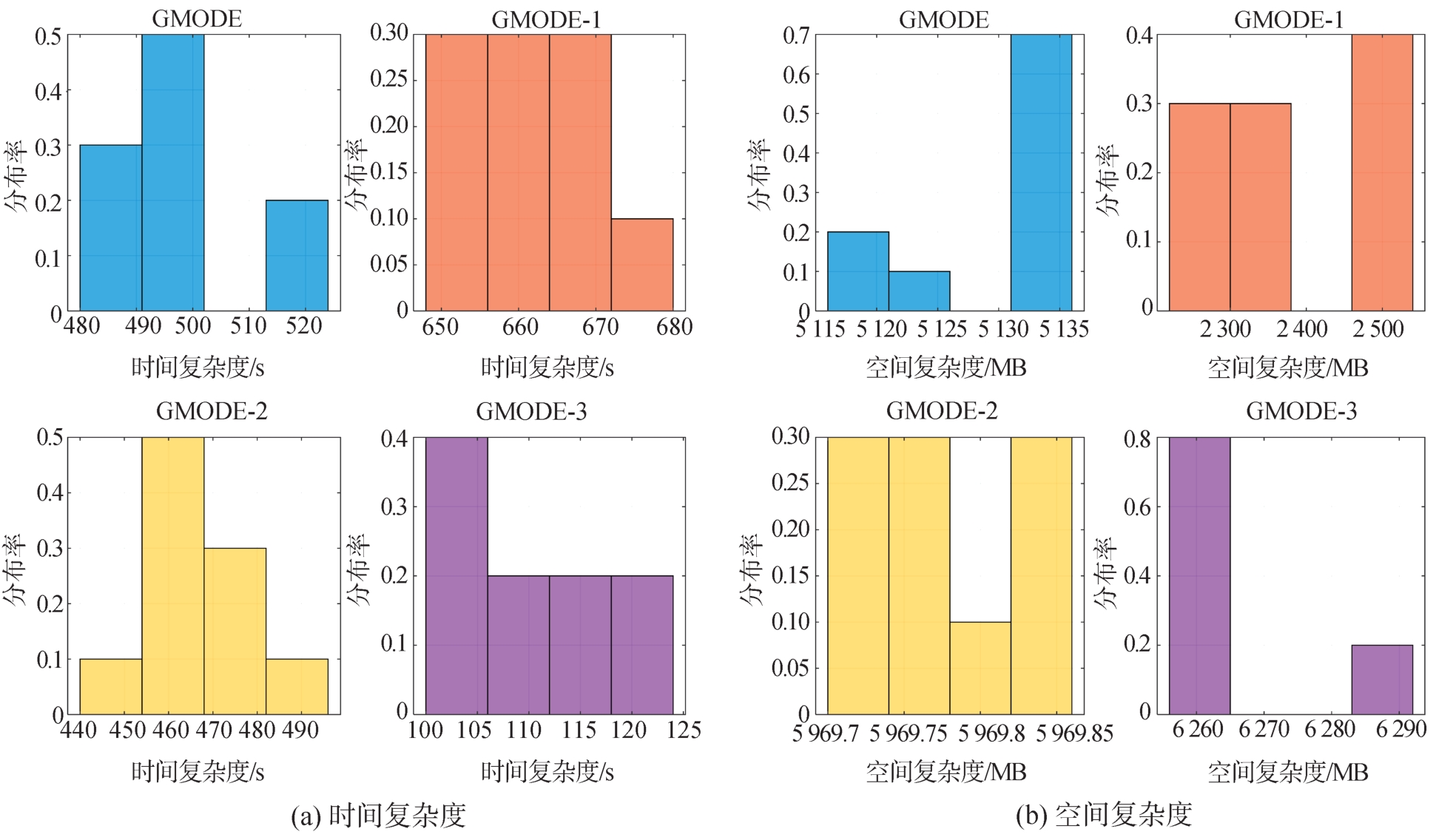
表9
计算策略验证
| 指标 | GMODE | GMODE-1 | GMODE-2 | GMODE-3 | |
|---|---|---|---|---|---|
时间 复杂度/s | Mean | 499.25 | 661.91 | 466.64 | 110.77 |
| Std | 11.34 | 7.92 | 13.14 | 7.12 | |
空间复 杂度/MB | Mean | 5 129.92 | 2 379.24 | 5 969.78 | 6 264.91 |
| Std | 6.51 | 100.46 | 0.05 | 12.72 | |
| 综合指标 | Mean | 0.489 8 | 0.428 3 | 0.512 8 | 0.353 3 |
| Std | 0.227 0 | 0.251 4 | 0.152 8 | 0.244 3 | |
| [1] | 李芳芳, 孙乾. 我国工业机器人发展现状的调查分析[J]. 机械传动, 2019, 43(6): 172-176. |
| Li Fangfang, Sun Qian. Investigation and Analysis of the Development Status of Industrial Robot of China[J]. Journal of Mechanical Transmission, 2019, 43(6): 172-176. | |
| [2] | Avram Oliver, Valente Anna. Trajectory Planning for Reconfigurable Industrial Robots Designed to Operate in a High Precision Manufacturing Industry[J]. Procedia CIRP, 2016, 57: 461-466. |
| [3] | 曹锦旗, 韩雪松. 工业机器人轨迹规划的研究方法综述[J]. 信息与控制, 2024, 53(4): 471-486, 498. |
| Cao Jinqi, Han Xuesong. A Review of Research Methods for Industrial Robot Trajectory Planning[J]. Information and Control, 2024, 53(4): 471-486, 498. | |
| [4] | Chen Haichu, Guo Chenglong, Wang Zhifeng, et al. The Trajectory Planning System for Spraying Robot Based on K-means Clustering and NURBS Curve Optimization[C]//IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society. Piscataway: IEEE, 2020: 5356-5361. |
| [5] | Cong Yongzheng, Jiang Congrang, Liu Hui, et al. Research on Trajectory Planning Method of Dual-arm Robot Based on ROS[C]//2020 Chinese Automation Congress (CAC). Piscataway: IEEE, 2020: 2616-2621. |
| [6] | Li Xiangfei, Zhao Huan, He Xianming, et al. A Novel Cartesian Trajectory Planning Method by Using Triple NURBS Curves for Industrial Robots[J]. Robotics and Computer-Integrated Manufacturing, 2023, 83: 102576. |
| [7] | 王桂荣, 倪志强, 周坤, 等. 多策略改进粒子群算法的机械臂时间最优轨迹规划[J]. 中国机械工程, 2025, 36(5): 1044-1053. |
| Wang Guirong, Ni Zhiqiang, Zhou Kun, et al. Time-optimal Trajectory Planning of Robotic Arms Based on MIPSO Algorithm[J]. China Mechanical Engineering, 2025, 36(5): 1044-1053. | |
| [8] | 崔靖凯, 周宇飞, 贺顺锋, 等. 基于改进灰狼算法的冗余机械臂轨迹跟踪与避障[J]. 光学精密工程, 2023, 31(24): 3595-3605. |
| Cui Jingkai, Zhou Yufei, He Shunfeng, et al. Trajectory Tracking and Obstacle Avoidance of a Redundant Robotic Manipulator Based on the Improved Grey Wolf Optimizer[J]. Optics and Precision Engineering, 2023, 31(24): 3595-3605. | |
| [9] | Huang Junsen, Hu Pengfei, Wu Kaiyuan, et al. Optimal Time-jerk Trajectory Planning for Industrial Robots[J]. Mechanism and Machine Theory, 2018, 121: 530-544. |
| [10] | 荣誉, 陈刚, 豆天赐. 一种多指标综合最优的抗冲击轨迹规划方法[J]. 中国机械工程, 2024, 35(2): 305-316. |
| Rong Yu, Chen Gang, Dou Tianci. A Multi Index Comprehensive Optimal Anti Impact Trajectory Planning Method[J]. China Mechanical Engineering, 2024, 35(2): 305-316. | |
| [11] | Sharma Shubhkirti, Kumar Vijay. A Comprehensive Review on Multi-objective Optimization Techniques: Past, Present and Future[J]. Archives of Computational Methods in Engineering, 2022, 29(7): 5605-5633. |
| [12] | Rahimi Iman, Gandomi Amir H, Chen Fang, et al. A Review on Constraint Handling Techniques for Population-based Algorithms: From Single-objective to Multi-objective Optimization[J]. Archives of Computational Methods in Engineering, 2023, 30(3): 2181-2209. |
| [13] | 刘建林, 黄海松, 范青松, 等. 基于改进樽海鞘群算法的机械臂多目标轨迹规划研究[J]. 中国机械工程, 2025, 36(9): 2047-2056. |
| Liu Jianlin, Huang Haisong, Fan Qingsong, et al. Multi-objective Trajectory Planning of Manipulators Based on Improved SSA[J]. China Mechanical Engineering, 2025, 36(9): 2047-2056. | |
| [14] | Storn R, Price K. DE-a Simple and Efficient Adaptive Scheme for Global Optimization Over Continuous Space[J]. Technical report, 1995, 25(6): 95-102. |
| [15] | 任旭阳, 卜旭辉, 尹艳玲, 等. 基于多策略多目标差分进化算法的风光储系统协调优化调度[J]. 系统仿真学报, 2025, 37(2): 450-461. |
| Ren Xuyang, Bu Xuhui, Yin Yanling, et al. Coordinated and Optimal Dispatching for Wind-photovoltaic-storage Systems Based on Multi-strategy Multi-objective Differential Evolution Algorithm[J]. Journal of System Simulation, 2025, 37(2): 450-461. | |
| [16] | 郑英, 吴泽华, 乔贵方, 等. 基于多目标差分算法的机器人几何参数辨识[J/OL]. 中国测试. (2025-05-15) [2025-06-24]. . |
| Zheng Ying, Wu Zehua, Qiao Guifang, et al. Robot Geometric Parameter Identification Method Based on Multi-objective Difference Algorithm[J/OL]. China Measurement & Test. (2025-05-15) [2025-06-24]. . | |
| [17] | Carl de Boor. A Practical Guide to Splines[M]. New York: Springer, 1978. |
| [18] | Das Swagatam, Sankha Subhra Mullick, Suganthan P N. Recent Advances in Differential Evolution-an Updated Survey[J]. Swarm and Evolutionary Computation, 2016, 27: 1-30. |
| [19] | Wang Liangying, Hong Lihuan, Fu Haoxuan, et al. Adaptive Distance-based Multi-objective Particle Swarm Optimization Algorithm with Simple Position Update[J]. Swarm and Evolutionary Computation, 2025, 94: 101890. |
| [20] | Nie Feiping, Zhang Runxin, Duan Yu, et al. Unconstrained Fuzzy C-means Based on Entropy Regularization: An Equivalent Model[J]. IEEE Transactions on Knowledge and Data Engineering, 2025, 37(2): 979-990. |
| [21] | Zhang Yadong, Wang Shaoping, Zio Enrico, et al. Multi-objective Maintenance Strategy for Complex Systems Considering the Maintenance Uncertain Impact by Adaptive Multi-strategy Particle Swarm Optimization[J]. Reliability Engineering & System Safety, 2025, 256: 110671. |
| [22] | Qian Shuqu, He Huihui, Wu Huihong, et al. A Hybrid Constrained Multi-objective Algorithm for Dynamic Economic Emission Dispatch[J]. International Journal of Electrical Power & Energy Systems, 2025, 169: 110711. |
| [23] | Wang Xin, Wang Xiang, Qin Bin. Improved Multi-objective Differential Evolution Algorithm and Its Application in the Capacity Configuration of Urban Rail Photovoltaic Hybrid Energy Storage Systems[J]. Journal of Energy Storage, 2024, 98, Part B: 113155. |
| [24] | Liu Yingfang, Sun Zhendong, Wang Yujie, et al. Capacity Configuration of Fuel Cell Hybrid Vehicles Using Enhanced Multi-objective Particle Swarm Optimization with Competitive Mechanism[J]. Energy Conversion and Management, 2024, 321: 119039. |
| [25] | R C Farias Lucas, F R Araújo Aluizio. IM-MOEA/D: An Inverse Modeling Multi-objective Evolutionary Algorithm Based on Decomposition[C]//2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Piscataway: IEEE, 2021: 462-467. |
| [26] | Li Jiale, Zhang Yuxuan, Wang Xuefei. Charging Station Localization and Sizing Determination Considering Smart Charging Strategies Based on NSGA-III and MOPSO[J]. Sustainable Cities and Society, 2025, 122: 106233. |
| [27] | Dai Cai, Wang Yuping, Ye Miao. A New Multi-objective Particle Swarm Optimization Algorithm Based on Decomposition[J]. Information Sciences, 2015, 325: 541-557. |
| [28] | Lin Qiuzhen, Liu Songbai, Zhu Qingling, et al. Particle Swarm Optimization with a Balanceable Fitness Estimation for Many-objective Optimization Problems[J]. IEEE Transactions on Evolutionary Computation, 2018, 22(1): 32-46. |
| [29] | Abubakar Ali, Reindorf Nartey Borkor, Amoako-Yirenkyi Peter. Stochastic Optimal Harmonic Suppression with Permissible Photovoltaic Penetration Level for Grid-linked Systems Using Monte Carlo-based Hybrid NSGA-II-MOPSO[J]. Energy Systems, 2024: 1-35. |
| [30] | Maalouf Elie, Daaboul Joanna, Julien Le Duigou, et al. Production Management for Mass Customization and Smart Cellular Manufacturing System: NSGA-II and SMPSO for Factory-level Planning[J]. The International Journal of Advanced Manufacturing Technology, 2022, 120(9): 6833-6854. |
| [31] | Tian Ye, Cheng Ran, Zhang Xingyi, et al. PlatEMO: A MATLAB Platform for Evolutionary Multi-Objective Optimization [Educational Forum][J]. IEEE Computational Intelligence Magazine, 2017, 12(4): 73-87. |
| [32] | Tian Ye, Zhu Weijian, Zhang Xingyi, et al. A Practical Tutorial on Solving Optimization Problems Via PlatEMO[J]. Neurocomputing, 2023, 518: 190-205. |
| [33] | 隋涛, 姜昊, 孔刘君, 等. 基于改进粒子群算法的机械臂轨迹规划研究[J]. 沈阳理工大学学报, 2023, 42(1): 7-12. |
| Sui Tao, Jiang Hao, Kong Liujun, et al. Research on Manipulator Trajectory Planning Based on Improved Particle Swarm Optimization Algorithm[J]. Journal of Shenyang Ligong University, 2023, 42(1): 7-12. |
| [1] | 秦浪, 谢嘉成, 乔晓军, 王学文, 肖智杰. 执行器位姿异常的机器人轨迹规划调整方法[J]. 系统仿真学报, 2026, 38(5): 1466-1483. |
| [2] | 梁斌豪, 魏静萱, 梁沨琴. 基于多区域动态分组的大规模多目标进化算法[J]. 系统仿真学报, 2026, 38(4): 974-987. |
| [3] | 章子瑶, 季云峰. 基于Transformer课程RL的机械臂接球策略仿真研究[J]. 系统仿真学报, 2026, 38(2): 321-331. |
| [4] | 江好胜, 武芳芳, 黄泽贤, 马子玥, 董春云, 平续斌. 动态障碍物环境下多四旋翼轨迹规划与跟踪[J]. 系统仿真学报, 2025, 37(8): 2089-2102. |
| [5] | 陈涛, 刘建璇, 王立忠, 邹湘军, 李晓娟. 六轴机械臂非奇异快速积分终端滑模轨迹跟踪控制研究[J]. 系统仿真学报, 2025, 37(8): 2115-2123. |
| [6] | 陈娟, 郑旺, 刘倩倩, 鲁斌. 基于动态储位分配策略的自动化立库多目标优化[J]. 系统仿真学报, 2025, 37(6): 1435-1448. |
| [7] | 顾文斌, 卿洁瑕, 方杰, 刘斯麒. 改进混合优化算法求解多目标IPPS问题[J]. 系统仿真学报, 2025, 37(5): 1197-1209. |
| [8] | 吴自松, 苌道方, 盖宇春. 基于两阶段混合算法的四向穿梭式密集仓储系统货位分配优化[J]. 系统仿真学报, 2025, 37(5): 1234-1245. |
| [9] | 李敏, 张森, 曾祥光, 王刚, 张童伟, 谢地杰, 任文哲, 张滔. 基于深度强化学习的四足机器人单腿越障轨迹规划[J]. 系统仿真学报, 2025, 37(4): 895-909. |
| [10] | 徐强, 徐坚磊, 胡燕海, 陈海辉, 张行, 邢兆辉. 基于改进模拟退火遗传算法的机械臂轨迹优化[J]. 系统仿真学报, 2025, 37(2): 404-412. |
| [11] | 刘翔, 金乾坤. 基于PAC-Bayes的多目标强化学习A2C算法研究[J]. 系统仿真学报, 2025, 37(12): 3212-3223. |
| [12] | 杨震, 苏丽, 成治雨. 采用RRT*算法和椭圆先验的机械臂约束规划研究[J]. 系统仿真学报, 2025, 37(10): 2643-2651. |
| [13] | 丁新桓, 王华庆, 党旭. 考虑尾气排放的交叉口信号配时多目标优化研究[J]. 系统仿真学报, 2025, 37(10): 2687-2700. |
| [14] | 王祝, 张振鹏, 张梦通, 徐广通. 安全走廊约束的无人机轨迹序列凸优化方法[J]. 系统仿真学报, 2025, 37(1): 134-144. |
| [15] | 王科, 官思佳, 殷希彦, 李西兴, 唐红涛. 基于混合遗传禁忌搜索算法的混流装配线平衡优化研究[J]. 系统仿真学报, 2025, 37(1): 167-182. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
