0 引言
未来联合作战,态势演进加快,博弈复杂剧烈。空中任务顺利实施,是争取战场主动,达成以快制慢,快速灵活聚能,准确适时释能的有效依托。智能预测对手空中作战任务,对于指挥员战场态势认知,辅助调配资源,部署作战行动具有重要意义。兵棋推演是对未来战争的预实践,受到越来越多重视。
一直以来,战场态势认知都是研究的热点。美国著名信息融合专家Linas J L将战场态势分为观测态势(observational situation, OS)、估计态势(assessment situation, AS)和预测态势(predictive situation, PS)三级态势,较好阐述了态势内涵。文献[1 ]结合战场态势三级结构和“OODA环”提出了“态势能力演化模型”,认为真正推动态势发展的是对抗双方的行动,指导行动的是对态势的判断和预测。
兵棋推演空中任务预测是基于具体行动的预测。目前已有不少研究文献,基于模板匹配、专家系统和贝叶斯网络等经典方法组合[2 -4 ] ,以及深度学习等流行人工智能方法[5 -6 ] ,实现不同作战背景下战术层级的对手任务预测。这些方法主要为满足战术需要而设计的模型,在联合战役层面应用时仍有一些局限:① 模板匹配、专家系统和贝叶斯网络等需要抽象领域专家经验知识,在知识表示和工程实现方面难度大,比如模板库建立,贝叶斯网络概率分布构建等。② 一些基于深度学习设计的智能方法,考虑战术细节过多,且只针对同一场数据,在联合战役层级应用时,一方面数据冗余,另一方面没有充分利用以往推演数据,加大了模型训练难度,降低了模型的有效性、准确性。同时,对抗条件下的作战行动如果采用纯人工预测,不仅对预测人员能力要求比较高,且不能输出稳定的预测结果,更不适宜大范围推广使用。
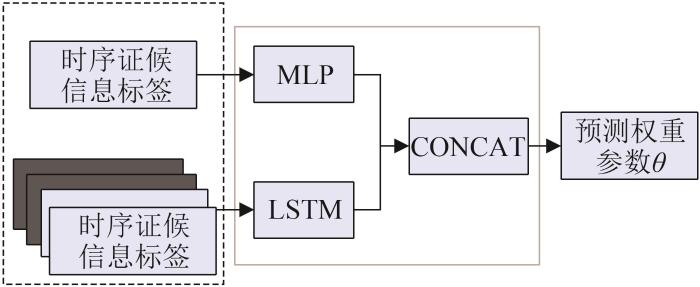
本文从兵棋推演的角度,研究对抗条件下空中任务智能预测方法。以联合战役级兵棋推演对抗环境为基础,对有关概念进行界定,设计了兵棋推演空中任务预测的2层神经网络模型,第1层包括目标资源特征信息的多层感知机[7 ] 和目标时序特征信息留存的长短时记忆LSTM网络[8 ] 2个模型,第2层设计了针对第1层2个模型训练得出的特征信息进行加权综合的多层感知机。通过实验验证了兵棋推演空中任务智能预测模型的有效性。
1 问题描述
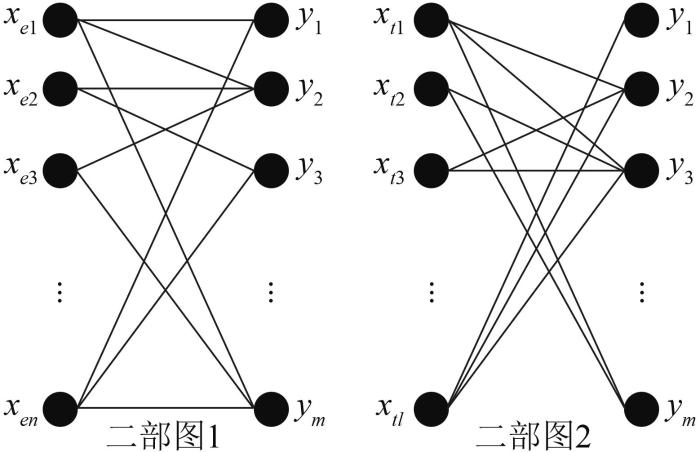
兵棋推演空中任务预测,是从动态演变推演态势中捕获提取对手空中目标状态和时序信息,结合作战经验推测其执行空中任务的过程。目标状态信息包括空中目标的机型数量组合等资源类信息,时序状态信息包括空中目标位置、留空时间、方向和速度等环境交互类信息。如图1 所示,可以将问题抽象为2个二部图G 1 = ( X e , Y , E 1 ) G 2 = ( X t , Y , E 2 ) X e = { x e 1 , x e 2 , ⋯ , x e n } x e i X t = { x t 1 , x t 2 , ⋯ ,
图1
图1
空中任务预测中二部图示意
Fig. 1
Bipartite Graphs in air mission prediction
x t l } x t 1 Y = { y 1 , y 2 , ⋯ , y m } y j e 1 i = ( x e i , y j ) ∈ E 1 x e i y j e 2 i = ( x t i , y j ) ∈ E 2 x t i y j
问题困难主要在以下几个方面:① 空中目标资源组合为开放的。对手在执行推演空中任务规划资源信息时,相关的机型数量组合就没有固定模式。② 空中目标时序环境交互状态也是开放的。对手规划具体空中任务的航线是不定的,空中目标表现时序状态信息也没有固定模式。③ 对抗状态下双方都会想方设法隐藏自身企图,采取各种手段欺骗对方,推演中获得的对手空中目标信息往往是片面的。可见,空中任务预测是指挥人员综合各方面知识,结合目标属性和时序状态信息的高度复杂的思维活动,很难建立明确的映射规则。
2 模型构建
兵棋推演空中任务预测过程,参演指挥人员根据探测的战场态势,反复斟酌各类征候信息,不断挖掘对比历史信息,找到预测空中任务的关键征候信息和征候信息序列,根据征候信息和征候信息序列做出空中任务的正确预判,某种程度上说是将推演态势中不确定性问题的大概率化。
2.1 模型总体框架设计
兵棋推演中参演指挥人员执行空中作战任务,需要动用各种资源,采取一系列行动,这必然会和环境产生交互,释放多种类型信息,通过探测手段能够侦获部分信息,这是兵棋推演空中任务预测的物质信息基础。为便于研究明确几个定义。
能被一方探测手段感知的对手执行空中任务所需资源的固有属性信息,对于∀ x e i ∈ X e
能被一方探测手段感知的对手执行空中任务所需资源与环境交互表现出的有时序特征的信息,对于∀ x t 1 ∈ X t
对手执行相似空中任务时,被探测到的征候信息和时序特征信息会表现出某种相似共现特征,本文采取3种策略学习这种共现特征。
设f 1 ( x e | ω ) ω y ∇ ( ⋅ ) ω η
(1)
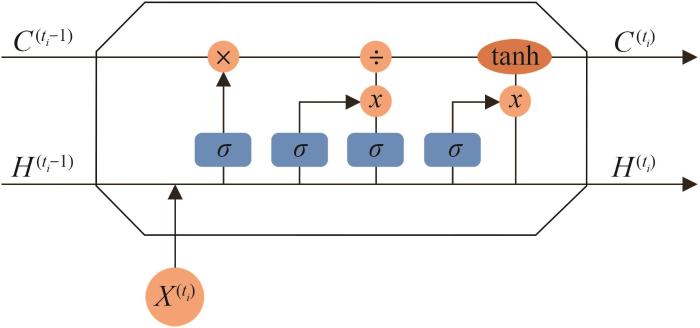
探测到的对手空中任务时序征候信息通常是不完整的,需要采取策略记录这些信息,以便对其空中任务做出正确预测,如图2 所示。本文借鉴长短时记忆网络模型的遗忘门、输入门、状态组合门、输出门思想,留存时序征候信息,预判其空中任务。
图2
图2
时序征候信息留存示意
Fig. 2
Retention diagram of time series symptom information
如图3 所示,综合预测权重是对策略1和2学习经验的综合,设f ( ( x e , x t ) | θ ) θ y ∇ ( ⋅ ) θ η
(2)
图3
图3
综合预测权重参数更新示意
Fig. 3
Graphs of updating comprehensive prediction weight parameters
2.2 基于MLP网络的征候信息权重更新
兵棋推演空中任务预测算法,主要设想从对手目标资源属性信息X e = { x e 1 , x e 2 , ⋯ , x e n } f = f * ( x e ) f ( x e | ω ) ω f * ( x e )
在模型整体网络设计方面,将资源属性信息x e y f ( 1 ) f ( 2 ) f ( 3 ) f ( 4 ) f ( 5 ) f = f ( 5 ) ( f ( 4 ) ( f ( 3 ) ( f ( 2 ) ( f ( 1 ) ( x e ) ) ) ) ) f x f * ( x e ) y
网络结构计算方面,以一个计算节点为例,主要由2部分组成:① 对输入元素资源属性x e = { x e 1 , x e 2 , ⋯ , x e n } b b α ( ⋅ )
h = α b + ∑ i = 1 n ω i x e i (3)
中间层计算方面,假设神经网络第k n k h ( k ) h i ( k ) i b j ( k ) W j , i k h i ( k ) h j ( k + 1 ) k + 1 j h i ( k + 1 )
h j ( k + 1 ) = α b j ( k ) + ∑ i = 1 n k W j , i k h i ( k ) (4)
在激活函数α ( ⋅ ) R e L U = m a x { 0 , z } 0
在输出与损失函数方面,考虑到兵棋推演空中任务预测是典型离散多分类问题,假设z n S o f t m a x z z i z i y ^ i S o f t m a x i
y ^ i = S o f t m a x ( z i ) = e x p ( z i ) ∑ j e x p ( z j ) (5)
得到预测值y ^ i
s c o r e 1 = l n ( y , y ^ i ) = - ∑ i = 0 n - 1 y i l n ( y ^ i ) (6)
2.3 基于LSTM时序征候信息留存
针对对手执行空中任务表现出时序征候信息X t = { x t 1 , x t 2 , ⋯ , x t m } L S T M ) 网络模型,用于留存时序征候信息。L S T M R N N R N N 图2 所示,C ( t i - 1 ) H ( t i - 1 )
step 1:由遗忘门决定那些时序征候信息被丢弃。假设先前隐藏状态h ( t i - 1 ) x t
f t i = σ ( W f ⋅ x t i + U f ⋅ h t i - 1 + b f ) (7)
式中:W f U f b f σ s i g m o i d C ( t i - 1 )
step 2:由输入门决定新输入时序征候信息x t i
i n t t i = σ ( W i n t ⋅ x t i + U i n t ⋅ h t i - 1 + b i n t ) (8)
x t i C ^ ( t i ) C ^ ( t i )
C ^ ( t i ) = t a n h ( W c ⋅ x t i + U c ⋅ h t i - 1 + b c ) (9)
step 3:组合旧单元状态C ( t i - 1 ) C ^ ( t i ) C t i
C t i = f t i ⨀ C ( t i - 1 ) + i n t t i ⨀ C ^ ( t i ) (10)
⨀ H a d a m a r d [9 ] ,也就是逐元素相乘。
step 4:基于更新的单元状态C t i h t i
o t i = σ ( W o ⋅ x t i + U o ⋅ h ( t i - 1 ) + b o ) (11)
h t i = o t i ⨀ t a n h ( C t i ) (12)
在此基础上,构建L S T M 公式(5)和(6),求各分类的相关离散分布和交叉商。
s c o r e 2 = l n ( y , y ^ i ) = - ∑ i = 0 n - 1 y i l n ( y ^ i ) (13)
2.4 智能组合预测算法
在前述2个模型基础上,设计综合兵棋推演空中任务预测模型。由式(6)产生对手空中目标资源属性征候信息与作战任务或意图的关联关系评价指标——实际标签与预测标签之间的差别交叉商[10 ] s c o r e 1 式(13)产生战场敌目标时序征候信息与作战任务或意图关联关系评价指标——交叉商s c o r e 2 s c o r e 1 s c o r e 2 14)、(15)得出初始综合评价指标s c o r e 0 ≤ α ≤ 1 s c o r e
s c o r e = s c o r e 1 ⋅ α + s c o r e 2 ⋅ ( 1 - α ) (14)
s c o r e = l n ( s c o r e ) (15)
经过以上模型训练,产生预测结果矩阵,根据结果进行概率统计,本文关注平均命中准确率和首次命中概率hit@1,前2次命中概率hit@2,以及前3次命中概率hit@3。为了防止学习模型过拟合,采取了2种策略:①设置最大训练次epoch限制;②设置评价指标s c o r e
Input:训练集合X e = { x e 1 , x e 2 , ⋯ , x e n } X t = { x t 1 , x t 2 , ⋯ , x t m } Y = { y 1 , y 2 , ⋯ , y n } μ δ θ W 0 e p o c h m a x
2) 计算∂ h r ∂ ω ( h r - 1 , h r ) = α ' ( a r ) ⋅ h r - 1
3) 计算∇ ( h r , o ) = ∑ ( h r - 1 , h r ) ∈ ε α ' ( a r + 1 ) ⋅ ω ( h r - 1 , h r ) ⋅
4) 计算∂ l ∂ ω ( h r - 1 , h r ) = ∇ ( h r , o ) ⋅ ∂ h r ∂ ω ( h r - 1 , h r )
3 实验分析
3.1 数据来源
实验数据来源于5场基于特定想定背景的兵棋系统演习的推演数据。主要提取推演过程中,某一具体空中目标执行作战任务相关数据,如目标雷达反射面RCS和电磁辐射信号等机型组合相关的资源属性信息,以及在空时间、空间位置、速度、方向等与环境交互相关时序特征信息等24个维度相关信息。为确保实验可行,依据兵棋推演数据特点、模型计算要求[11 ] ,以及研究人员认知经验,主要采集作战时间、蓝方空中目标ID、实体属性、经纬度、方向角和作战任务等6个维度数据,然后进行统一编码和归一化处理,在此基础上构建数据样本集(40 214条),部分整理后数据如表1 所示。然后按照训练测试比85 % : 15 %
数据清洗方面,针对采集数据可能存在的缺失、冗余等情况,利用经验知识对数据进行补充与平滑处理,删除冗余数据。
数据变换方面,根据模型需要,对采集数据进行编码,利用下式对相应数据进行归一化处理。
x i = x i - m i n m a x - m i n + δ (16)
式中:m a x m i n δ
3.2 收敛性能分析
采用torch的nn方法,构建了长短时记忆网络LSTM学习模型和前馈深度学习模型,以及特征判别综合前馈深度学习模型,然后用训练集和测试集对模型进行了训练测试,训练模型超参设置如下:
batch_size=600;learning_rate=0.001;
in_dim_attr=6;n_hidden_1=64;
num_layers=2;n_hidden_2=128;
out_dim=13;n_hidden_3=256;
in_dim_copy=2;n_hidden_4=128;
regularization=0.01;n_hidden_5=64;
device=CPU;n_epochs=1 000;
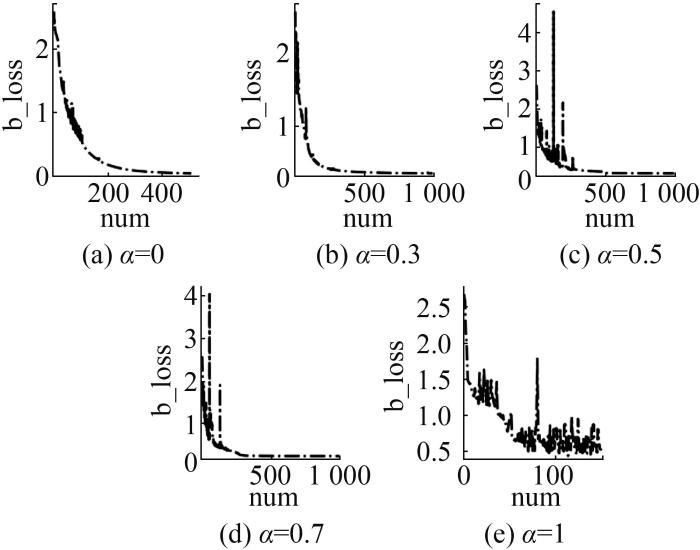
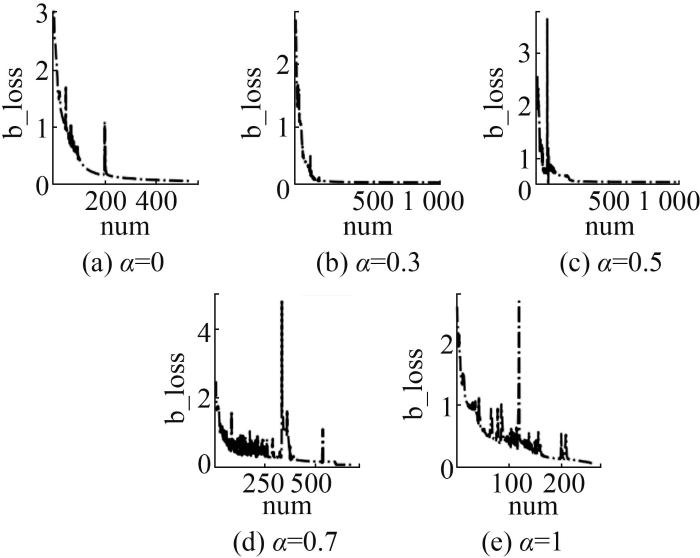
训练总次数最大限制在1 000次,训练评价指标交叉商b_loss不小于0.032,基分类器权重为0,0.3,0.5,0.7,1时,其中5组数据训练收敛效果如图4 ~8 所示。
图4
图4
第1组数据训练收敛情况
Fig. 4
Training convergence of group 1 data
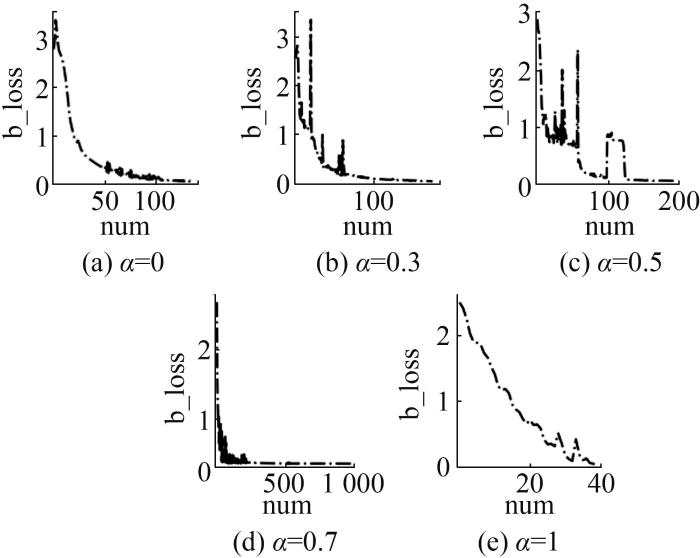
图5
图5
第2组数据训练收敛情况
Fig. 5
Training convergence of group 2 data
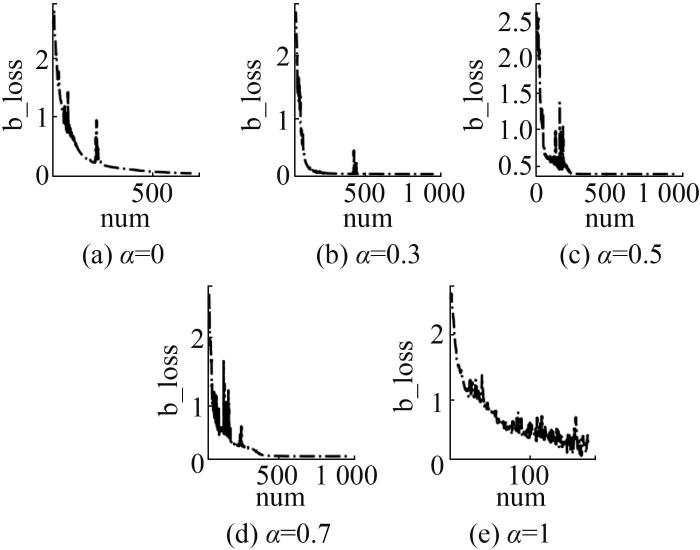
图6
图6
第3组数据训练收敛情况
Fig. 6
Training convergence of group 3 data
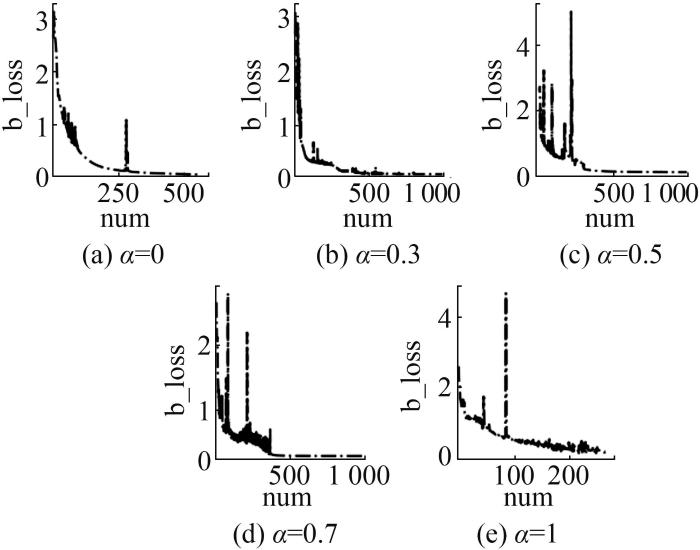
图7
图7
第4组数据训练收敛情况
Fig. 7
Training convergence of group 4 data
图8
图8
第5组数据训练收敛情况
Fig. 8
Training convergence of group 5 data
通过对比分析不难看出,本文设计的模型收敛性很好,模型训练一般不超过500次就能很好收敛,再者权重α α α
图9
图9
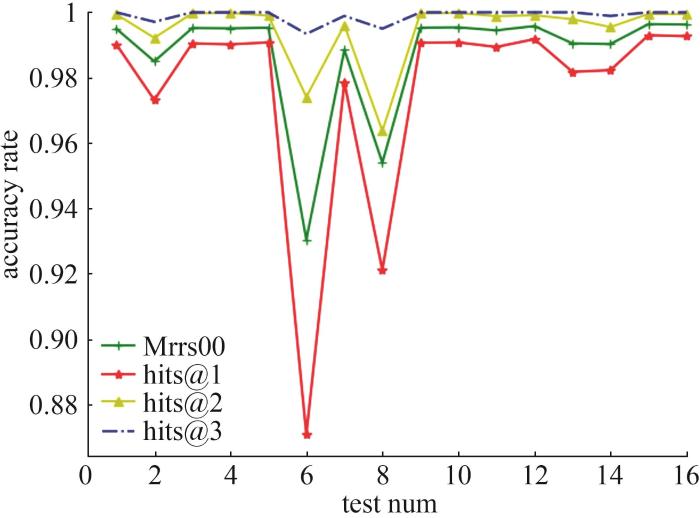
α =0时测试结果
Fig. 9
Test result when α = 0
图10
图10
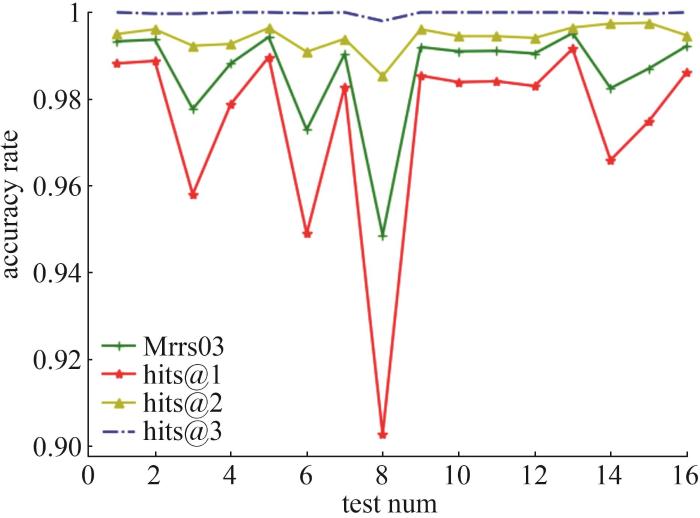
α =0.3时测试结果
Fig. 10
Test results when α = 0.3
图11
图11
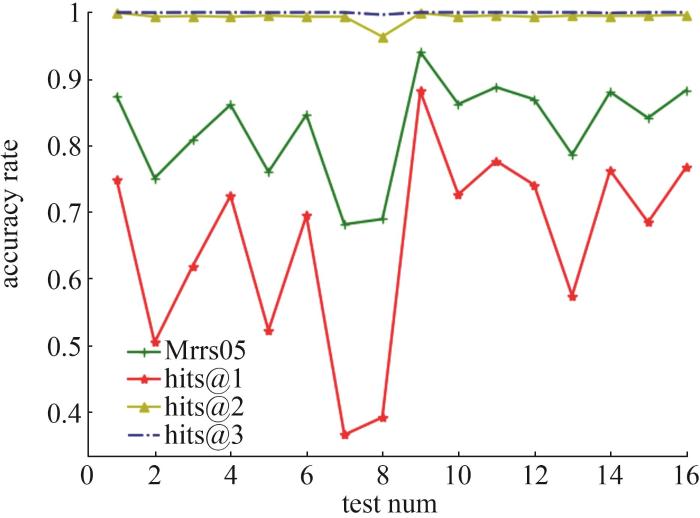
α =0.5时测试结果
Fig. 11
Test results when α = 0.5
3.3 测试结果分析
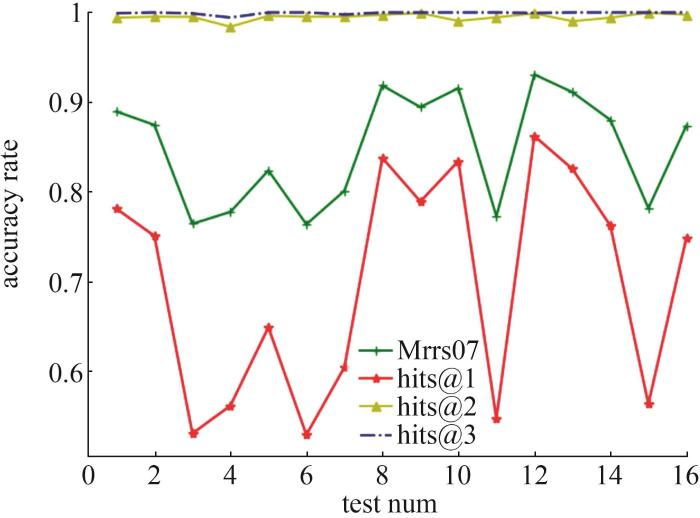
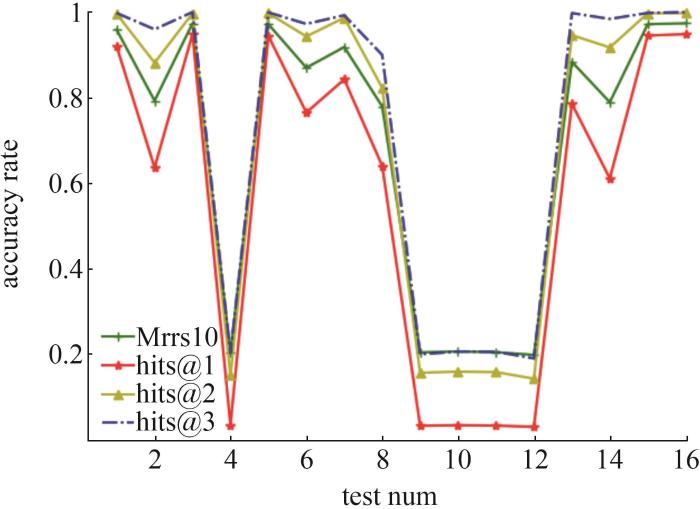
分别针对α 为0,0.3,0.5,0.7,1时,基于16组数据训练的模型进行测试,结果如图9 ~13 所示。
图12
图12
α =0.7时测试结果
Fig. 12
Test results when α = 0.7
图13
图13
α =1时测试结果
Fig. 13
Test results when α = 1
综合分析图9 ~13 可以看出,α α = 0 α = 0.3 α = 0.7 α = 0.7
4 结论
兵棋推演空中任务预测是一项高度对抗的复杂思维活动,需要综合分析空中目标资源属性征候信息和环境交互时序征候信息。针对这2类信息,本文设计了基于MLP网络的征候信息权重更新和基于LSTM时序征候信息留存2种策略,在此基础上,根据交叉熵设计了综合智能预测算法。实验结果表明,本文提的基于兵棋推演的敌空中任务智能预测学习模型,在提高学习效率和防止过拟合方面都有很好表现,能够较准确的对对手空中任务进行预测,初步具备了辅助战役层级参演指挥人员预判对手空中任务的信息需求。如何综合运用这些判断信息进行战场控制和如何进一步提高模型可靠性,是下一步研究重点。
参考文献
View Option
[1]
王飞 , 司光亚 , 贺宗平 , 等 对抗势能的原理与计算方法
[J]. 系统工程与电子技术 , 2020 , 42 (12 ): 2771 -2778 .
[本文引用: 1]
Wang Fei Si Guangya He Zongping et al Theory and Calculation Method of Confrontational Potatial Energy
[J]. Systems Engineering and Electronics , 2020 ,42 (12 ): 2771 -2778 .
[本文引用: 1]
[2]
邓海军 , 尹全军 , 胡记文 , 等 基于MEBN的战术意图识别
[J]. 系统工程与电子技术 , 2010 , 32 (11 ): 2374 -2379 .
[本文引用: 1]
Deng Haijun Yin Quanjun Hu Jiwen et al Tactical Intention Recognition Based on MEBN
[J]. Journal of Systems Engineering and Electronics , 2010 , 32 (11 ):2374 -2379 .
[本文引用: 1]
[3]
朱波 , 方立恭 , 张小东 基于贝叶斯网络的空中目标意图识别方法
[J]. 现代防御技术 , 2012 , 40 (2 ): 109 -113 .
Zhu Bo Fang Ligong Zhang Xiaodong Air Target Intention Recognition Method Based on Bayesian Network
[J]. Modern Defense Technology , 2012 , 40 (2 ): 109 -113 .
[4]
刘砚菊 , 寇国豪 , 宋建辉 基于RBF神经网络的空中目标识别技术
[J]. 火力与指挥控制 , 2015 , 40 (8 ): 9 -13 .
[本文引用: 1]
Liu Yanju Kou Guohao Song Jianhui Target Recognition Based on RBF Neural Network
[J]. Fire Control & Command Control , 2015 , 40 (8 ): 9 -13 .
[本文引用: 1]
[5]
姚庆锴 , 柳少军 , 贺筱媛 , 等 战场目标作战意图识别问题研究与展望
[J]. 指挥与控制学报 , 2017 , 3 (2 ): 127 -131 .
[本文引用: 1]
Yao Qingkai Liu Shaojun He Xiaoyuan et al Research and Prospect of Battlefield Target Operational Intention Recognition
[J]. Journal of Command and Control , 2017 , 3 (2 ): 127 -131 .
[本文引用: 1]
[6]
欧微 , 柳少军 , 贺筱媛 , 等 战场对敌目标战术意图智能识别模型研究
[J]. 计算机仿真 , 2017 (9 ): 10 -14 , 19 .
[本文引用: 1]
Wei Ou Liu Shaojun He Xiaoyuan et al Tactical Intention Recognition Algorithm Based on Encoded Temporal Features
[J].Command Control & Simulation , 2017 (9 ): 10 -14 , 19 .
[本文引用: 1]
[7]
周志华 机器学习 [M]. 北京 : 清华大学出版社 , 2016 .
[本文引用: 1]
Zhou Zhihua Machine Learning [M]. Beijing : Tsinghua University Press , 2016 .
[本文引用: 1]
[8]
马耀 , 汤继良 图深度学习 [M]. 王怡琦, 金卫, 译. 北京 :电子工业出版社 , 2021 .
[本文引用: 1]
Ma Yao Tang Jiliang Deep Learning on Graphs [M].Wang Yiqi, Jin Wei, Translated. Beijing : Publishing House of Elctronics Industry , 2021 .
[本文引用: 1]
[9]
Zhu C Chen M Fan C et al Learning from History: Modeling Temporal Knowledge Graphs with Sequential Copy-Generation Networks
[C]// The AAAI Conference on Artificial Intelligence , 2021 : 4732 -4740 .
[本文引用: 1]
[10]
Jin W Jiang H Qu M et al Recurrent Event Network: Global Structure Inference over Temporal Knowledge Graph
[C]// ICLR 2020 Conference Blind Submission . 2020 : arXiv1904.05530.
[本文引用: 1]
[11]
胡晓峰 , 杨镜宇 , 张明智 , 等 战争复杂体系能力分析与评估研究 [M]. 北京 : 科学出版社 , 2019 .
[本文引用: 1]
Hu Xiaofeng Yang Jingyu Zhang Mingzhi et al Research on Capability Analysis and Evaluation of War Complex System [M].Beijing : Publishing House of Science , 2019 .
[本文引用: 1]
对抗势能的原理与计算方法
1
2020
... 一直以来,战场态势认知都是研究的热点.美国著名信息融合专家Linas J L将战场态势分为观测态势(observational situation, OS)、估计态势(assessment situation, AS)和预测态势(predictive situation, PS)三级态势,较好阐述了态势内涵.文献[1 ]结合战场态势三级结构和“OODA环”提出了“态势能力演化模型”,认为真正推动态势发展的是对抗双方的行动,指导行动的是对态势的判断和预测. ...
Theory and Calculation Method of Confrontational Potatial Energy
1
2020
... 一直以来,战场态势认知都是研究的热点.美国著名信息融合专家Linas J L将战场态势分为观测态势(observational situation, OS)、估计态势(assessment situation, AS)和预测态势(predictive situation, PS)三级态势,较好阐述了态势内涵.文献[1 ]结合战场态势三级结构和“OODA环”提出了“态势能力演化模型”,认为真正推动态势发展的是对抗双方的行动,指导行动的是对态势的判断和预测. ...
基于MEBN的战术意图识别
1
2010
... 兵棋推演空中任务预测是基于具体行动的预测.目前已有不少研究文献,基于模板匹配、专家系统和贝叶斯网络等经典方法组合[2 -4 ] ,以及深度学习等流行人工智能方法[5 -6 ] ,实现不同作战背景下战术层级的对手任务预测.这些方法主要为满足战术需要而设计的模型,在联合战役层面应用时仍有一些局限:① 模板匹配、专家系统和贝叶斯网络等需要抽象领域专家经验知识,在知识表示和工程实现方面难度大,比如模板库建立,贝叶斯网络概率分布构建等.② 一些基于深度学习设计的智能方法,考虑战术细节过多,且只针对同一场数据,在联合战役层级应用时,一方面数据冗余,另一方面没有充分利用以往推演数据,加大了模型训练难度,降低了模型的有效性、准确性.同时,对抗条件下的作战行动如果采用纯人工预测,不仅对预测人员能力要求比较高,且不能输出稳定的预测结果,更不适宜大范围推广使用. ...
Tactical Intention Recognition Based on MEBN
1
2010
... 兵棋推演空中任务预测是基于具体行动的预测.目前已有不少研究文献,基于模板匹配、专家系统和贝叶斯网络等经典方法组合[2 -4 ] ,以及深度学习等流行人工智能方法[5 -6 ] ,实现不同作战背景下战术层级的对手任务预测.这些方法主要为满足战术需要而设计的模型,在联合战役层面应用时仍有一些局限:① 模板匹配、专家系统和贝叶斯网络等需要抽象领域专家经验知识,在知识表示和工程实现方面难度大,比如模板库建立,贝叶斯网络概率分布构建等.② 一些基于深度学习设计的智能方法,考虑战术细节过多,且只针对同一场数据,在联合战役层级应用时,一方面数据冗余,另一方面没有充分利用以往推演数据,加大了模型训练难度,降低了模型的有效性、准确性.同时,对抗条件下的作战行动如果采用纯人工预测,不仅对预测人员能力要求比较高,且不能输出稳定的预测结果,更不适宜大范围推广使用. ...
基于贝叶斯网络的空中目标意图识别方法
0
2012
Air Target Intention Recognition Method Based on Bayesian Network
0
2012
基于RBF神经网络的空中目标识别技术
1
2015
... 兵棋推演空中任务预测是基于具体行动的预测.目前已有不少研究文献,基于模板匹配、专家系统和贝叶斯网络等经典方法组合[2 -4 ] ,以及深度学习等流行人工智能方法[5 -6 ] ,实现不同作战背景下战术层级的对手任务预测.这些方法主要为满足战术需要而设计的模型,在联合战役层面应用时仍有一些局限:① 模板匹配、专家系统和贝叶斯网络等需要抽象领域专家经验知识,在知识表示和工程实现方面难度大,比如模板库建立,贝叶斯网络概率分布构建等.② 一些基于深度学习设计的智能方法,考虑战术细节过多,且只针对同一场数据,在联合战役层级应用时,一方面数据冗余,另一方面没有充分利用以往推演数据,加大了模型训练难度,降低了模型的有效性、准确性.同时,对抗条件下的作战行动如果采用纯人工预测,不仅对预测人员能力要求比较高,且不能输出稳定的预测结果,更不适宜大范围推广使用. ...
Target Recognition Based on RBF Neural Network
1
2015
... 兵棋推演空中任务预测是基于具体行动的预测.目前已有不少研究文献,基于模板匹配、专家系统和贝叶斯网络等经典方法组合[2 -4 ] ,以及深度学习等流行人工智能方法[5 -6 ] ,实现不同作战背景下战术层级的对手任务预测.这些方法主要为满足战术需要而设计的模型,在联合战役层面应用时仍有一些局限:① 模板匹配、专家系统和贝叶斯网络等需要抽象领域专家经验知识,在知识表示和工程实现方面难度大,比如模板库建立,贝叶斯网络概率分布构建等.② 一些基于深度学习设计的智能方法,考虑战术细节过多,且只针对同一场数据,在联合战役层级应用时,一方面数据冗余,另一方面没有充分利用以往推演数据,加大了模型训练难度,降低了模型的有效性、准确性.同时,对抗条件下的作战行动如果采用纯人工预测,不仅对预测人员能力要求比较高,且不能输出稳定的预测结果,更不适宜大范围推广使用. ...
战场目标作战意图识别问题研究与展望
1
2017
... 兵棋推演空中任务预测是基于具体行动的预测.目前已有不少研究文献,基于模板匹配、专家系统和贝叶斯网络等经典方法组合[2 -4 ] ,以及深度学习等流行人工智能方法[5 -6 ] ,实现不同作战背景下战术层级的对手任务预测.这些方法主要为满足战术需要而设计的模型,在联合战役层面应用时仍有一些局限:① 模板匹配、专家系统和贝叶斯网络等需要抽象领域专家经验知识,在知识表示和工程实现方面难度大,比如模板库建立,贝叶斯网络概率分布构建等.② 一些基于深度学习设计的智能方法,考虑战术细节过多,且只针对同一场数据,在联合战役层级应用时,一方面数据冗余,另一方面没有充分利用以往推演数据,加大了模型训练难度,降低了模型的有效性、准确性.同时,对抗条件下的作战行动如果采用纯人工预测,不仅对预测人员能力要求比较高,且不能输出稳定的预测结果,更不适宜大范围推广使用. ...
Research and Prospect of Battlefield Target Operational Intention Recognition
1
2017
... 兵棋推演空中任务预测是基于具体行动的预测.目前已有不少研究文献,基于模板匹配、专家系统和贝叶斯网络等经典方法组合[2 -4 ] ,以及深度学习等流行人工智能方法[5 -6 ] ,实现不同作战背景下战术层级的对手任务预测.这些方法主要为满足战术需要而设计的模型,在联合战役层面应用时仍有一些局限:① 模板匹配、专家系统和贝叶斯网络等需要抽象领域专家经验知识,在知识表示和工程实现方面难度大,比如模板库建立,贝叶斯网络概率分布构建等.② 一些基于深度学习设计的智能方法,考虑战术细节过多,且只针对同一场数据,在联合战役层级应用时,一方面数据冗余,另一方面没有充分利用以往推演数据,加大了模型训练难度,降低了模型的有效性、准确性.同时,对抗条件下的作战行动如果采用纯人工预测,不仅对预测人员能力要求比较高,且不能输出稳定的预测结果,更不适宜大范围推广使用. ...
战场对敌目标战术意图智能识别模型研究
1
2017
... 兵棋推演空中任务预测是基于具体行动的预测.目前已有不少研究文献,基于模板匹配、专家系统和贝叶斯网络等经典方法组合[2 -4 ] ,以及深度学习等流行人工智能方法[5 -6 ] ,实现不同作战背景下战术层级的对手任务预测.这些方法主要为满足战术需要而设计的模型,在联合战役层面应用时仍有一些局限:① 模板匹配、专家系统和贝叶斯网络等需要抽象领域专家经验知识,在知识表示和工程实现方面难度大,比如模板库建立,贝叶斯网络概率分布构建等.② 一些基于深度学习设计的智能方法,考虑战术细节过多,且只针对同一场数据,在联合战役层级应用时,一方面数据冗余,另一方面没有充分利用以往推演数据,加大了模型训练难度,降低了模型的有效性、准确性.同时,对抗条件下的作战行动如果采用纯人工预测,不仅对预测人员能力要求比较高,且不能输出稳定的预测结果,更不适宜大范围推广使用. ...
Tactical Intention Recognition Algorithm Based on Encoded Temporal Features
1
2017
... 兵棋推演空中任务预测是基于具体行动的预测.目前已有不少研究文献,基于模板匹配、专家系统和贝叶斯网络等经典方法组合[2 -4 ] ,以及深度学习等流行人工智能方法[5 -6 ] ,实现不同作战背景下战术层级的对手任务预测.这些方法主要为满足战术需要而设计的模型,在联合战役层面应用时仍有一些局限:① 模板匹配、专家系统和贝叶斯网络等需要抽象领域专家经验知识,在知识表示和工程实现方面难度大,比如模板库建立,贝叶斯网络概率分布构建等.② 一些基于深度学习设计的智能方法,考虑战术细节过多,且只针对同一场数据,在联合战役层级应用时,一方面数据冗余,另一方面没有充分利用以往推演数据,加大了模型训练难度,降低了模型的有效性、准确性.同时,对抗条件下的作战行动如果采用纯人工预测,不仅对预测人员能力要求比较高,且不能输出稳定的预测结果,更不适宜大范围推广使用. ...
1
2016
... 本文从兵棋推演的角度,研究对抗条件下空中任务智能预测方法.以联合战役级兵棋推演对抗环境为基础,对有关概念进行界定,设计了兵棋推演空中任务预测的2层神经网络模型,第1层包括目标资源特征信息的多层感知机[7 ] 和目标时序特征信息留存的长短时记忆LSTM网络[8 ] 2个模型,第2层设计了针对第1层2个模型训练得出的特征信息进行加权综合的多层感知机.通过实验验证了兵棋推演空中任务智能预测模型的有效性. ...
1
2016
... 本文从兵棋推演的角度,研究对抗条件下空中任务智能预测方法.以联合战役级兵棋推演对抗环境为基础,对有关概念进行界定,设计了兵棋推演空中任务预测的2层神经网络模型,第1层包括目标资源特征信息的多层感知机[7 ] 和目标时序特征信息留存的长短时记忆LSTM网络[8 ] 2个模型,第2层设计了针对第1层2个模型训练得出的特征信息进行加权综合的多层感知机.通过实验验证了兵棋推演空中任务智能预测模型的有效性. ...
1
2021
... 本文从兵棋推演的角度,研究对抗条件下空中任务智能预测方法.以联合战役级兵棋推演对抗环境为基础,对有关概念进行界定,设计了兵棋推演空中任务预测的2层神经网络模型,第1层包括目标资源特征信息的多层感知机[7 ] 和目标时序特征信息留存的长短时记忆LSTM网络[8 ] 2个模型,第2层设计了针对第1层2个模型训练得出的特征信息进行加权综合的多层感知机.通过实验验证了兵棋推演空中任务智能预测模型的有效性. ...
1
2021
... 本文从兵棋推演的角度,研究对抗条件下空中任务智能预测方法.以联合战役级兵棋推演对抗环境为基础,对有关概念进行界定,设计了兵棋推演空中任务预测的2层神经网络模型,第1层包括目标资源特征信息的多层感知机[7 ] 和目标时序特征信息留存的长短时记忆LSTM网络[8 ] 2个模型,第2层设计了针对第1层2个模型训练得出的特征信息进行加权综合的多层感知机.通过实验验证了兵棋推演空中任务智能预测模型的有效性. ...
Learning from History: Modeling Temporal Knowledge Graphs with Sequential Copy-Generation Networks
1
2021
... ⨀ H a d a m a r d [9 ] ,也就是逐元素相乘. ...
Recurrent Event Network: Global Structure Inference over Temporal Knowledge Graph
1
2020
... 在前述2个模型基础上,设计综合兵棋推演空中任务预测模型.由式(6) 产生对手空中目标资源属性征候信息与作战任务或意图的关联关系评价指标——实际标签与预测标签之间的差别交叉商[10 ] s c o r e 1 式(13) 产生战场敌目标时序征候信息与作战任务或意图关联关系评价指标——交叉商s c o r e 2 . 为了将第一阶段学习成果s c o r e 1 s c o r e 2 14 )、(15 )得出初始综合评价指标s c o r e 0 ≤ α ≤ 1 s c o r e
1
2019
... 实验数据来源于5场基于特定想定背景的兵棋系统演习的推演数据.主要提取推演过程中,某一具体空中目标执行作战任务相关数据,如目标雷达反射面RCS和电磁辐射信号等机型组合相关的资源属性信息,以及在空时间、空间位置、速度、方向等与环境交互相关时序特征信息等24个维度相关信息.为确保实验可行,依据兵棋推演数据特点、模型计算要求[11 ] ,以及研究人员认知经验,主要采集作战时间、蓝方空中目标ID、实体属性、经纬度、方向角和作战任务等6个维度数据,然后进行统一编码和归一化处理,在此基础上构建数据样本集(40 214条),部分整理后数据如表1 所示.然后按照训练测试比85 % : 15 %
1
2019
... 实验数据来源于5场基于特定想定背景的兵棋系统演习的推演数据.主要提取推演过程中,某一具体空中目标执行作战任务相关数据,如目标雷达反射面RCS和电磁辐射信号等机型组合相关的资源属性信息,以及在空时间、空间位置、速度、方向等与环境交互相关时序特征信息等24个维度相关信息.为确保实验可行,依据兵棋推演数据特点、模型计算要求[11 ] ,以及研究人员认知经验,主要采集作战时间、蓝方空中目标ID、实体属性、经纬度、方向角和作战任务等6个维度数据,然后进行统一编码和归一化处理,在此基础上构建数据样本集(40 214条),部分整理后数据如表1 所示.然后按照训练测试比85 % : 15 %







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}