实际环境中多无人车协同路径规划模型研究
Research on Cooperative Path Planning Model of Multiple Unmanned Vehicles in Real Environment
实际环境中多无人车协同路径规划模型研究 |
| 张国辉, 王璇, 张雅楠, 高昂 |
|
Research on Cooperative Path Planning Model of Multiple Unmanned Vehicles in Real Environment |
| Guohui Zhang, Xuan Wang, Yanan Zhang, Ang Gao |
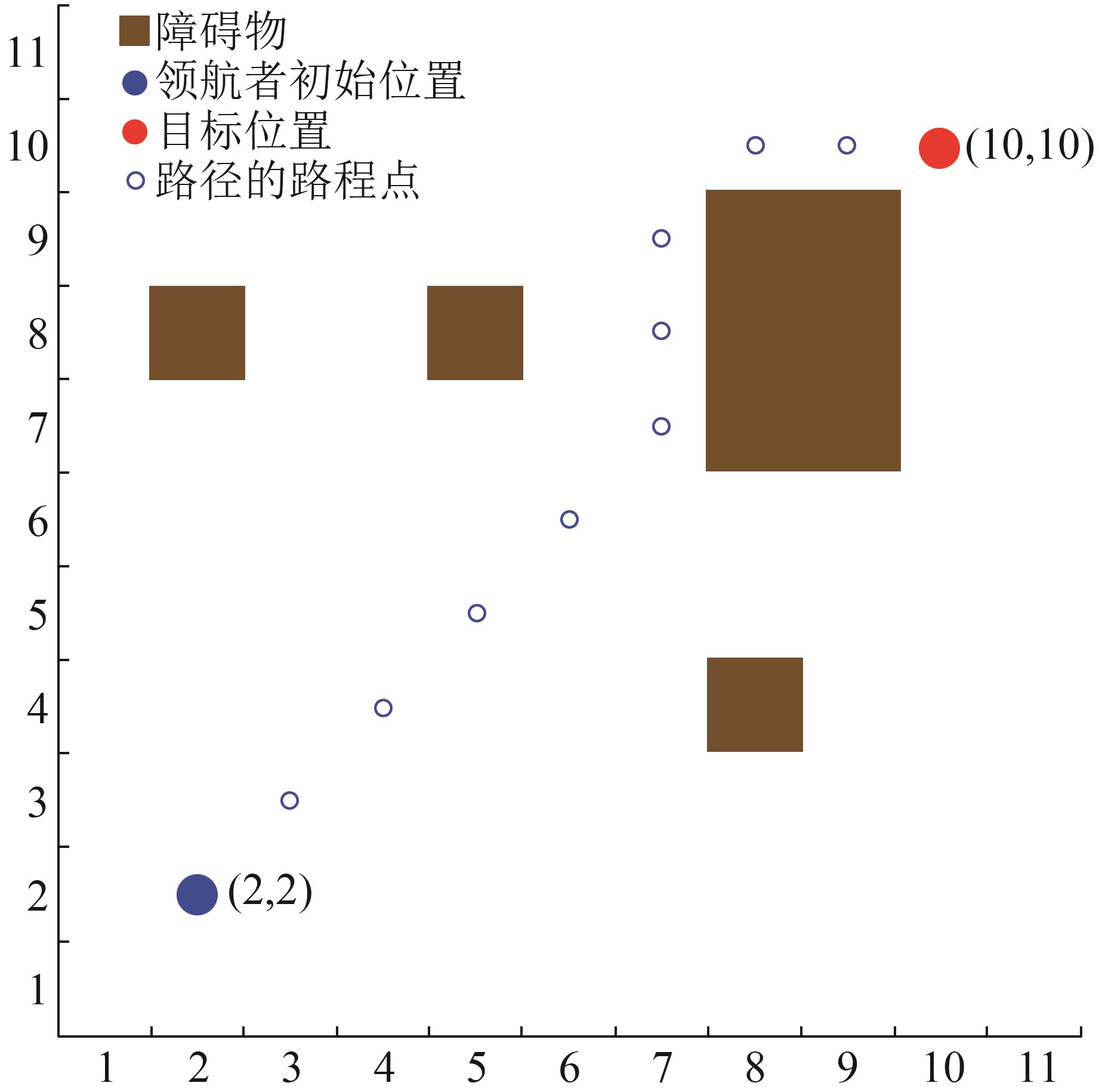
| 图 9 第1种初始条件及其全局路径规划 |
| Fig. 9 The first initial condition and its global path planning |
|
|